Здесь представлена информация, которая позволит Вам почуствовать уверенность при выборе системы очистки Вашего Дома и принять наилучшее решение, обеспечивающее настоящую Чистоту и Свежесть. Основные параметры вакуумных систем AMPS (амперы) — сила тока, представляет количество электроэнергии, потребляемой электродвигателем системы в процессе работы. Может показаться, что чем выше значение этого параметра, тем мощнее данный электродвигатель. Строго говоря, это не совсем и не всегда так. Электродвигатель, который потребляет больше электроэнергии совсем не означает, что электроэнергия, которую он потребляет, используется максимально эффективно. WATT (ватты) — определяет мощность двигателя,
т.е. работу которую он может выполнить mm H20 (вакуум) — определяет макимальную силу всасывания, генерируемую электродвигателем системы при полностью перекрытом доступе воздуха. Этот показатель характеризует потенциальную энергию пневмосистемы. Но, так как эффективность вакуумной чистки базируется на принципе движения возможно большего количества воздуха через систему за единицу времени, то совершенно понятно, что сама по себе сила всасывания, без каких-то других свойств пневмосистемы, обеспечивающих максимально возможный воздушный поток, не может являться критерием эффективности. Л / СЕК (литры в секунду) — это пропускная способность системы, т.е. максимальный объём воздуха в литрах, пропускаемй через систему за одну секунду, т.е. расход водуха. Поскольку расход напрямую связан со скоростью движения воздуха через фиксированное сечение, он является неплохим индикатором кинетической энергии системы. Максимальный расход достигается, когда пневмосистема обеспечивает условия для совершенно беспрепятственного прохождения воздушного потока. В обычных условиях — шланги, чистящие насадки, мешки, фильтры и аккумулируемая пыль создают препятствия для движения воздуха, тем самым существенно понижая расход воздуха. Поэтому, сам по себе расход воздуха, хотя и является очень важным параметром, сам по себе также не является наилучшим индикатором эффективности пневмосистемы. Для конечного пользователя нужнее следующие критерии MAXIMUM AIR
WATTS (Максимальные
воздушные Ватты)- это максимальная полезная мощность воздушного
потока в точке отбора, т.е. та полезная
работа, которую может выполнить воздушный
поток в единицу времени на входе в систему. Это
суммарная характеристика потенциальной и
кинетической энергии воздушного потока,
генерируемого системой, измеренная в точке
отбора воздуха, т.е. именно там, где это
важно для конечного пользователя. SUSTAINED CLEANING POWER (Стабильность полезной мощности) — это способность системы поддерживать без потерь максимальную полезную мощность воздушного потока, т.е. Maximum Air Watts — во времени. Через некоторое время после эксплуатации ваккумной системы, имеющей мешок или фильтр, наблюдается существенное уменьшение эффективности всасывания, вызванное потерями энергии воздушного потока на трение в массе аккумулированной пыли.
Центральные устройства VACUFLO True Cyclonic® обеспечивают SUSTAINED CLEANING POWER на все 100%, так как сепарация пыли от воздушного потока происходит без использования каких-либо мешков или фильтров. В действительности, 96-98% всей пыли, захваченной системой, сохраняется в прозрачном приёмном бункере системы, остальные же микроскопические остатки пыли вентилируются наружу — вне пределов Вашего дома.
Запатентованный VACUFLO метод циклонной сепарации пыли от воздушного потока не предусматривает какого-бы то ни было использования фильтров и/или мешков! Это означает максимальную эффективность системы на все времена! ФАКТЫ:
ИТАК, ВАШ ВЫБОР НАЧИНАЕТСЯ С ВЫБОРА ЦЕНТРАЛЬНОГО УСТРОЙСТВА Центральные устройства отличаются друг от друга размерами, электродвигателями и техникой сепарации… Послед нее и является наиболее важным отличием одного агрегата от другого. Метод сепарации (фильтрации) напрямую влияет на эффективность действия центральной вакуумной системы.Центральное устройство с
«фильтрующим мешком»
Центральное устройство с «обратным мешком» Так называемый «самоочищающийся» тканевый мешок собирает какую-то часть пыли, затем сбрасывает её в канистру ФАКТЫ:
VACUFLO® предлагает широчайший выбор центральных устройств, гибких шлангов, турбинных щёток активного действия и прочих аксессуаров, разработанных специально для обеспечения высочайшего класса системы VACUFLO True Cyclonic® |
www.vacuflo.ee
АИР, АО, Сименс и их расшифровка
Электрики, занимавшиеся эксплуатацией электродвигателей производства СССР, не имели затруднений в расшифровке обозначений, которые наносились на шильдик. Асинхронные двигатели, согласно ГОСТ, имели обозначения А, А2, АО2, 4А, 4АМ. Двигатели, произведенные в странах содружества, носили отличные обозначения. Например, маркировка электродвигателей, произведенных в Болгарии, вместо 4А обозначались МО, а 4АМ как М. С развалом СССР заводы-производители стали применять свое обозначение, что затрудняет электрикам подбор двигателей при ремонтных работах. В этой статье будет рассмотрена маркировка электродвигателей и их расшифровка.Современное обозначение и расшифровка параметров электродвигателей
- марка (тип) электродвигателей;
- вариант исполнения;
- рабочая длина оси вращения;
- монтажные размеры крепления;
- длина сердечника;
- число пар полюсов;
- модификация конструкции;
- климатическое исполнение.
Ниже приведена расшифровка обозначений современных двигателей.


Ниже вы видите пример полной маркировки асинхронных двигателей и его расшифровка.
 Также указывается и степень защиты электродвигателя от пыли и влаги по классу IP, цифрами от 0 до 8. Здесь первая цифра — это защита от пыли, а вторая — от влаги.
Также указывается и степень защиты электродвигателя от пыли и влаги по классу IP, цифрами от 0 до 8. Здесь первая цифра — это защита от пыли, а вторая — от влаги. При этом в наименовании указывается монтажное исполнение. По коду монтажного исполнения можно определить, как производится крепление двигателей – на лапах или с помощью фланца. Например, IM 1081 говорит о креплении на лапах, и о том, что возможна установка валом вверх, вниз или горизонтально.
При этом в наименовании указывается монтажное исполнение. По коду монтажного исполнения можно определить, как производится крепление двигателей – на лапах или с помощью фланца. Например, IM 1081 говорит о креплении на лапах, и о том, что возможна установка валом вверх, вниз или горизонтально.

Для электропривода во взрывозащищенном исполнении в пакете сопроводительных документов должен быть сертификат, в котором указана маркировка по степени взрывозащиты, по её виду и сфере применения. Также и в маркировки двигателя если вначале указана буква В – он взрывозащищенный, например ВА07А(М)-450-710.

При этом обозначение двигателей постоянного тока отличается от переменного и имеет такой вид, как показано на рисунке.
 На ниже приведенном рисунке представлена информация о тяговых электродвигателях, смонтированных на кранах.
На ниже приведенном рисунке представлена информация о тяговых электродвигателях, смонтированных на кранах.
 Аналогичные данные размещаются на шильдиках электродвигателей.
Аналогичные данные размещаются на шильдиках электродвигателей.
 Информация на табличке говорит, что:
Информация на табличке говорит, что:
- АИР – тип асинхронной машины;
- 80 – длина вала;
- А-монтажный размер;
- 4-количество полюсов;
- У- предназначен для работы в умеренном климате;
- 3-устанавливается в закрытом помещении.
Мощность 1,1 кВт, частота вращения 1420 об/мин. Может работать от переменного тока напряжением 220 или 380 вольт при включении обмоток треугольником или звездой.
Ток потребления соответственно будет 4,9/2,8А. Степень защиты IP54. Произведен в республике Беларусь.
Схема соединения и расшифровка обозначений клемм в коробке
На электродвигателе имеется клеммная коробка, её еще называют «брно». Где на болтах крепятся выводы начала и конца обмоток статора.

На вышеприведенном рисунке представлена коробка с маркировкой клемм, а на нижеприведенном рисунке приведено обозначение выводов обмоток, перемыкая которые определенным образом, можно получить соединение треугольником или звездой:
- U1 является концом первой обмотки, а W2 началом третьей;
- V1 конец второй, а U2 – начало первой;
- W1 конец третьей, а V2 начало второй.
Перемыкая контакты U1, V1, W1 получаем соединение обмоток звездой, а перемыкая пары контактов U1 c W2, V1 c U2, W1 c V2 — обмотки соединенные треугольником.

Маркировка импортных двигателей
На импортных электродвигателях используется аналогичная маркировка.
 На рисунке представлен шильдик электродвигателя, произведенного в Италии. Где нанесена маркировка аналогичная отечественным двигателям, но по европейским стандартам. По этим данным можно подобрать отечественный аналог.
На рисунке представлен шильдик электродвигателя, произведенного в Италии. Где нанесена маркировка аналогичная отечественным двигателям, но по европейским стандартам. По этим данным можно подобрать отечественный аналог.
Немецкая фирма Siemens выпускает электродвигатели различного назначения. При этом обозначение на шильдике наносятся данные для стандартного напряжения, но для разной частоты питающего напряжения. На приведенном ниже рисунке, представлена расшифровка информации с шильдика двигателя фирмы Сименс.

Аналогичная маркировка электродвигателей размещается на шильдиках китайских производителей. Зачастую они выпускают продукцию под известными брендами, такими как тот же «Сименс».
Определение параметров двигателя при отсутствии таблички
Если нет таблички на двигателе,и отсутствует паспорт, возникает вопрос, как определить его мощность. Для этого существует несколько способов:
- Измерив, диаметр и длину вала, по таблице вычисляют его параметры.
- Зная габаритные и крепежные размеры, можно по этой информации осуществить подбор электродвигателей, по таблицам, которые вы найдете по ссылке ниже.
- Измерив, сопротивление обмоток, по формуле определяют мощность. Для этого замеряют сопротивление при соединении звездой. Результат делят на 2. Полученные данные подставляем в формулу: P=(220v*220v)/R, полученную цифру умножаем на 3, это и будет искомая мощность. При соединении звездой расчет производят по этой же формуле, результат умножаем на 6. Получаем необходимую мощность.
- Подключив мотор к сети, амперметром замеряют ток холостого хода. После чего по данным таблицы производят подбор двигателей.
Такая ситуация часто возникает на производстве. Поэтому электрики должны понимать, как узнать мощность двигателей при отсутствии шильдика.
При подключении электрики обязаны учитывать направление вращения вала привода подсоединенного к насосам. Это относится как к трехфазным, так и однофазным двигателям. На некоторых моторах на корпус наносится стрелка, указывающая направление вращения.
Подробно об этом мы писали в отдельной статье, опубликованной ранее — https://samelectrik.ru/kak-opredelit-moshhnost-elektrodvigatelya.html.
Маркировка моторчиков для радиоуправляемых моделей
Маркировка бесколлекторных двигателей на модели имеет два показателя: размеры статора диаметр/высота или внешние габариты. Обозначаются четырехзначным цифровым значением, например, 2212. Первые две цифры определяют диаметр, а вторые — длину статора в миллиметрах.

Обратите внимание, что указываются размеры не корпуса, а статора. Приведенный выше моторчик типа 2212 – outrunner по конструкции, то есть бесколлекторный двигатель с внешним ротором. Размеры его корпуса будут отличаться от 22 и 12 мм.

Однако, внешние размеры статора это маркетинговый ход менеджеров по продажам, потому что обмотка в нём может быть любой.
Вот мы и рассмотрели, какая бывает маркировка электродвигателей и их расшифровка. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
samelectrik.ru
Подробно об электродвигателе
Главная » Новости
Опубликовано: 07.07.2017
 Запрещено использовать двигатель работающий на магнитном поле часть 1
Запрещено использовать двигатель работающий на магнитном поле часть 1Электродвигатель — это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель, изобретенный в 1889г. электротехником Михаилом Осиповичем Доливо-Добровольским, который доказал оптимальность системы трехфазного переменного тока. Электродвигатели АИР отличаются простотой конструкцией и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых оборотах. Асинхронные электродвигатели могут эксплуатироваться в макроклиматических районах с умеренным, тропическим, умеренно холодным и холлодным климатом в условиях. Асинхронная машина, работающая в режиме двигателя, применяется в электроприводах, не требующих регулирования частоты вращения вала электродвигателя (напр., в насосах, редукторах, вентиляторах и др.)
Асинхронные электродвигатели широко применяются в приводах металлообрабатывающих, деревообрабатывающих и других видов станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в лифтах, в ручном электроинструменте, в бытовых приборах и т.д. Практически нет отрасли и техники, где не использовались бы электродвигатели.
Проверить и подключить мотор от стиральной машины. Подробно. Популярное видео. TDA1085
Структура серии АИР предусматривает следующие группы и виды исполнения:
— модификации по условиям окружающей среды; — по точности установочных размеров; — с дополнительными устройствами (с фазным ротором, со встроенным электромагнитным тормозом), с повышенным скольжением, многоскоростные, узкоспециальные (для судовых механизмов, для привода моноблочных насосов, рудничное исполнение, для привода безсальниковых компрессоров и др.).Подключение мощного трехфазного двигателя, пусковая емкость
Электродвигатель АИР основного исполнения предназначен для работы от сети переменного тока частоты 50 Гц и изготовляется на номинальные напряжения: 220В, 380В, 660В, 220/380В, 380/660В. Конструктивные исполнения и способ монтажа по ГОСТ 2479-79 (э лектродвигатели АИС по стандартам DIN42673/DIN42677).
svarka-info.com
Силовая установка электромобиля, электродвигатель » Эксплуатация электромобиля в России
 24 января 2019 в 13:32
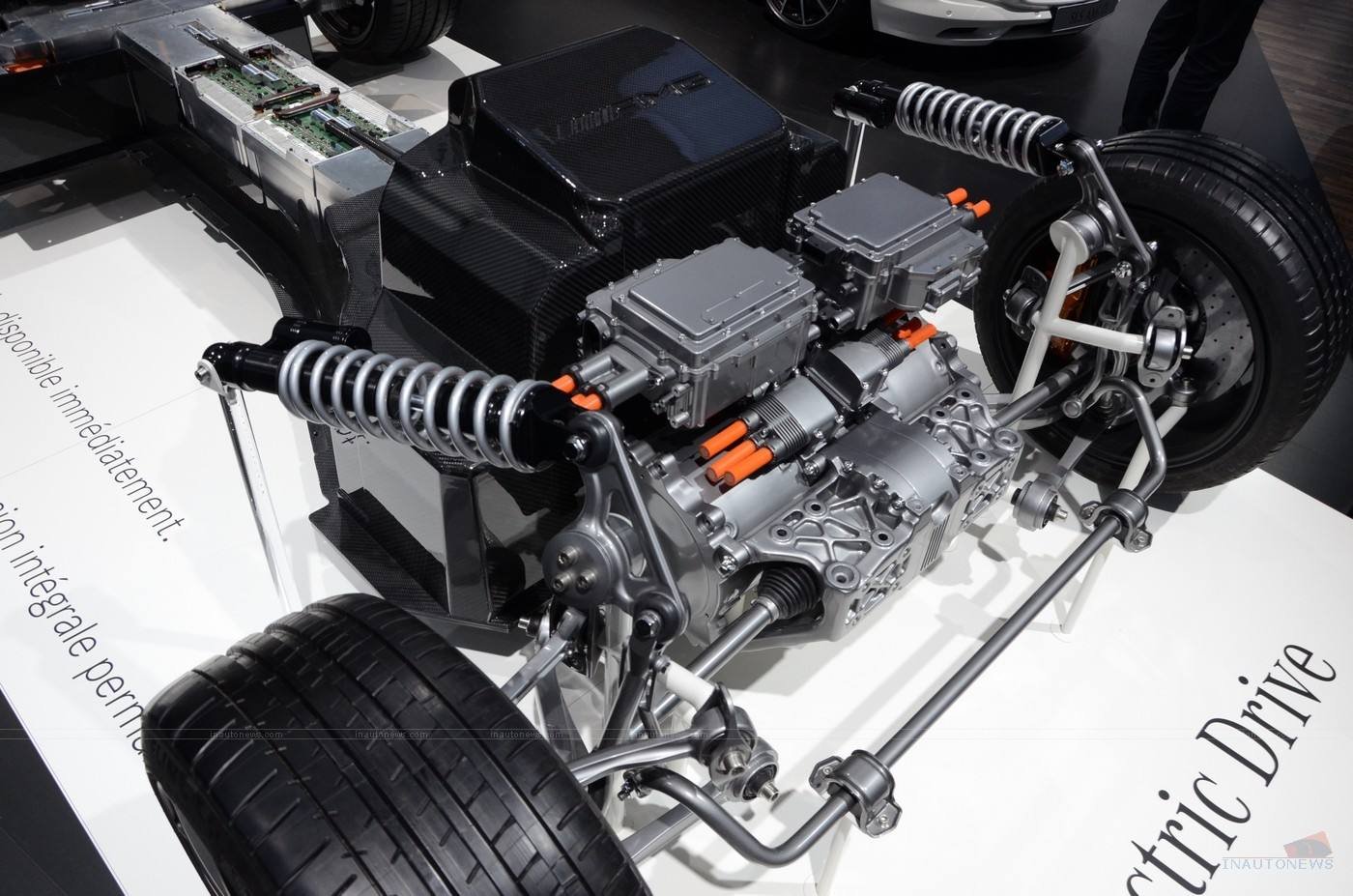
24 января 2019 в 13:32Мощность электродвигателя электромобиля, как и в других транспортных средствах, измеряется в киловаттах (кВт). 100 кВт примерно равно 134 лошадиным силам. Отличительная черта электродвигателя состоит в том, что в отличие от ДВС он может выдавать максимальный крутящий момент в более широком диапазоне оборотов. Это означает, что динамика электрокара с двигателем мощностью 100 кВт будет значительно лучше динамики транспортного средства с двигателем внутреннего сгорания мощностью 100 кВт, который может обеспечивать максимальный крутящий момент в пределах ограниченного диапазона оборотов (бензиновый мотор обычно надо «раскручивать» до высоких оборотов, чтобы получить номинальный крутящий момент).
Энергия теряется в процессе преобразования электрической энергии в механическую. Приблизительно 90% энергии от батареи преобразуется в механическую энергию, остальные 10% — потери в двигателе и трансмиссии. Это означает, что КПД (коэффициент полезного действия) электродвигателя достигает 90%, тогда как КПД бензинового мотора — до 25%, а дизеля — до 50%.
Обычно электропитание в виде постоянного тока подается в преобразователь, где он становится переменным, а далее приходит в трехфазный двигатель переменного тока.
Для некоторых электромобилей используются двигатели постоянного тока. В некоторых случаях используются универсальные двигатели, на который можно подавать как переменный ток, так и постоянный.
В последнее время электродвигатели совершенствуются, в том числе были реализованы различные типы двигателей, например, асинхронные двигатели на автомобилях Tesla и двигатели с постоянными магнитами в Nissan Leaf и Chevrolet Bolt.

На изображении выше можно увидеть схему силовой установки Nissan Leaf второго поколения.
- Электродвигатель создает крутящий момент для перемещения автомобиля, а также генерирует зарядный ток во время рекуперативного торможения.
- Инвертор, используя двигатель, преобразует электричество постоянного тока в переменный ток для движения, а также преобразует переменный ток в постоянный во время торможения (рекуперации) для заряда батареи.
- Понижающий редуктор модулирует вращение двигателя и передает мощность на колеса (приводной вал), аналогично классической передаче.
- PDM (модуль подачи питания) представляет из себя интегрированный блок с зарядным устройством для зарядки переменным током высокого напряжения батареи, преобразователем постоянного тока, который преобразует высокое напряжение в низкое, и распределительную коробку, которая распределяет высокое напряжение на каждый блок, блокируя ток, как прерыватель, когда возникают перегрузки.
Подробно понять устройство электромобиля поможет это видео:
efut.ru
Статьи
ЕС-двигатель – это бесколлекторный синхронный двигатель со встроенным электронным управлением, или, более кратко, электронно-коммутируемый (Electronically Commutated) двигатель. Его иногда также называют BLDC-двигателем (Brushless DC motor), то есть бесщеточным двигателем постоянного тока. Вентиляторы, построенные на базе данного двигателя, называются ЕС-вентиляторами.
![]()
ЕС-двигатель имеет внешний ротор, в котором располагаются сегменты с постоянными магнитами. Управление вращением ротора ЕС-двигателя осуществляется за счет контролируемой подачи электроэнергии на обмотку статора в зависимости от положения ротора, которое отслеживается при помощи датчиков Холла, а также заданных параметров регулирования, поступающих, например, от внешних датчиков соответствующего типа в виде токовых (4–20 мА) или потенциальных (0–10 В) сигналов. При этом встроенный PID-регулятор позволяет, наряду с пропорциональным управлением, устанавливать скорость реагирования двигателя на изменение управляющего сигнала в зависимости от его дифференциальных и интегральных показателей.
EC-вентилятор EBMpapst с технологией GreenTech
Электронно-коммутируемый вентилятор с плавной регулировкой оборотов, произведен в Германии. Отличается низким уровнем шума и практически неслышен на малых скоростях.
Технология GreenTech
Сердце GreenTech бьется в энергосберегающей электронно-коммутируемой технологии ebm-papst (GreenTech ЕС technology). Чем меньше расходуется энергии, тем ниже затраты на электричество. Но это — только начало, электронно-коммутируемая GreenTech технология (GreenTech ЕС technology) означает также, что двигателями и вентиляторами можно управлять, они отрегулированы таким образом, что всегда соответствуют необходимым эксплуатационным требованиям. И это имеет огромное значение, поскольку нет ничего более экономичного, чем, к примеру, изделие, которое имеет функцию самоотключения, когда в этом есть необходимость.
Следующее преимущество электроники – бесщёточное коммутирование. Это позволяет электронно-коммутируемым GreenTech двигателям и вентиляторам работать абсолютно без износа, практически бесшумно, не теряя в производительности и имея более долгий срок службы.
Таким образом, благодаря технологии GreenTech день за днем уменьшаются расходы на электроэнергию, и в то же самое время, длительный срок службы позволяет снижать издержки на материалы и обслуживание.

Инновационная технология электродвигателей
Наши двигатели с внешним ротором давно известны среди специалистов – тихие, мощные и постоянно совершенствуемые, они сделали нас лидером мирового рынка. Благодаря замечательному интеграционному потенциалу они идеально подходят для самых разнообразных сфер применения. Дополнив эти решения электродвигателями с внутренним ротором для динамичных сфер применения и особо агрессивных химических сред, мы смогли получить самую широкую номенклатуру вентиляторов и двигателей в мире.
Интеллектуальная электроника
— «мозг» любого современного системного решения. Использование электроники в качестве управляющего элемента позволяет получить идеальное сочетание приводных систем и аэродинамики, идеально приспосабливая каждое решение к конкретной области применения – с ручным управлением или в составе автоматической системы. В результате получается высококачественная конечная продукция из единого источника для любой области: от узкоспециализированных систем охлаждения электроники до энергосберегающих отопительных комплексов.
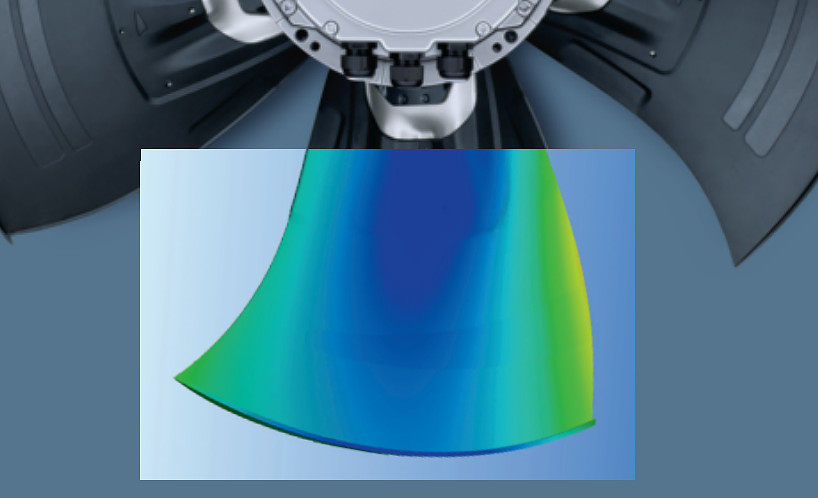
Аэродинамика, которая «думает» вместе с вами
Оптимальная форма имеет важное значение, для осевых вентиляторов, центробежных вентиляторов в корпусе и без корпуса, компактных и тангенциальных вентиляторов. Поэтому мы всегда проектируем лопасти, крыльчатки и канальные корпуса вентиляторов с учетом особенностей конкретного применения в определенной среде. Только так нам удается достичь максимально возможной эффективности при минимально возможном уровне шума. Для этого мы в совершенстве изучили аэродинамику.
Принцип работы
ЕС-двигателя основан на том, что в поле, создаваемом встроенными в ротор постоянными магнитами, осуществляется управление вектором магнитного поля путем изменения направления тока в обмотке статора. В каждый момент времени контроллер вычисляет и подает на обмотку статора полярность тока, которая необходима для того, чтобы обеспечить непрерывное вращение ротора с заданной скоростью.
EC-двигатели возможно подключать к постоянному источнику напряжения согласно параметрам или через встроенный коммутационный модуль непосредственно к сети переменного тока (220 В, 380 В). С использованием стандартного приборного интерфейса RS 485 или специальной шины ebm BUS обеспечена возможность управления вентилятором (либо группой вентиляторов до 31 шт. в каждой) при помощи ПК или КПК. Количество групп вентиляторов в интегрированной системе управления может достигать 256. Возможно также использование технологии Bluetooth. Предусмотрена выдача тревожных и аварийных сигналов, а также обеспечение мониторинга работы системы.
breezartshop.ru
Значение EV, BEV,FCEV ,HEV,Plug in,PHEV,PEV, electric vehicle,рникшв
 По мере изучения информации относящихся к тематике электромобилей, гибридов, и т.д. время от времени сталкиваешься с сокращениями, которые вводят в некоторое заблуждение, и утрудняют или приводят к неправильному пониманию материала. Ниже мы постарались в доступной форме изложить разшифровку некоторых сокращений, большей частью касающиеся классификации экологически чистых транспортных средств.
По мере изучения информации относящихся к тематике электромобилей, гибридов, и т.д. время от времени сталкиваешься с сокращениями, которые вводят в некоторое заблуждение, и утрудняют или приводят к неправильному пониманию материала. Ниже мы постарались в доступной форме изложить разшифровку некоторых сокращений, большей частью касающиеся классификации экологически чистых транспортных средств.
EV (electric vehicle) — транспортное средство, которое для осуществления передвижения использует одну или несколько электрических силовых установок (электродвигателей).
Для осуществления питания EV могут виступать разные источники — солнечные батареи, водородные элементы питания, аккумуляторные батареи и т.д.
BEV (Battery Electric Vehicle) — транспортное средство на аккумуляторных источниках питания. Транспортное средство, которое для осуществления передвижения использует электрическую силовую установку(электродвигатель) источником питания которой является сугубо аккумуляторная батарея. В качестве примера можно привести Nissan Leaf.
FCEV (Fuel Cell Electric Vehicle) — транспортное средство на водородных элементах питания. Транспортное средство, которое для осуществления передвижения использует электрическую силовую установку (электродвигатель) источником питания которой являются водородные элементы питания. Электроэнергия вырабатывается путем взаимодействия гидрогена из водородных элементов и оксигена из окружающей среды. В качестве примера можно привести Mercedes-Benz B-Class F-CELL.
HEV (Hybrid Electric Vehicle) — транспортное средство, которое для осуществления передвижения использует совмещение электрической силовой установки (электродвигателя), и силовой установки на ином виде топлива (например, бензиновый двигатель) в разных формах взаимодействия:
Parallel hybrids — как электродвигатель так и бензиновый двигатель(как вариант) подключены к трансмиссии, и могут работать одновременно. Как пример Chevrolet Malibu.
Series hybrids — только электродвигатель подключен к трансмиссии, бензиновый двигатель используется для питания электродвигателя, или подзарядки аккумуляторных батарей. Например,Chevrolet Volt. Кстати, можно встретить иное название данного типа — E-REV или ER-EV (Extended Range Electric Vehicle), т.е. электромобиль с возможностью увеличения запаса хода.
Power-split hybrids — являются сочетанием двух указанных выше. Такой тип используют большинство гибридных автомобилей Ford, Lexus, Nissan.
Также необходимо заметить, что гибридные электромобили делятся по степени «гибридизации» :
Full hybrid (полный гибрид) — может использовать для передвижения как по отдельности электродвигатель или бензиновый двигатель, так и их комбинацию. Например, Toyota Prius.
Mild hybrid (неполный гибрид) — автомобиль не может передвигаться при помощи только электродвигателя. Например, Chevrolet Silverado Hybrid.
Plug in (префикс «P») указывает на то, что аккумуляторные батареи транспортного средства могут подзаряжаться от внешнего источника питания, например — обычной розетки. Отсюда акронимы PHEV (Plug in Hybrid Electric Vehicle), PEV (Plug in Electric Vehicle) и т.д.
ICE (Internal Combustion Engine) — двигатель внутреннего сгорания.
E85 (также E15, E10) — бензиново-этаноловая смесь. Число возле буквы указывает на процент этанола в смеси.
myelectromobile.com
какие они бывают (electric motor)
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
Двигатель постоянного тока (ДПТ)
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810 кВт и напряжением 1500 В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5 МВт). В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ.
Универсальный коллекторный двигатель
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Асинхронный электродвигатель
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Синхронный электродвигатель
Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности. Все эти машины выполнялись с контактными кольцами, о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм. И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Вентильно-индукторный двигатель с самовозбуждением (ВИД СВ, SRM)
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Вентильно-индукторный двигатель с независимым возбуждением (ВИД НВ)
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
Заключение: какой же электродвигатель самый лучший?
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60 кВт, а 540 кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60 кВт придется установить синхронную машину и инвертор на 540 кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540 кВт вместо 60 кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30 км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540 кВт, а 300 кВт. Зона ослабления поля в Тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100 кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300 кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
www.electromobile360.ru
