Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
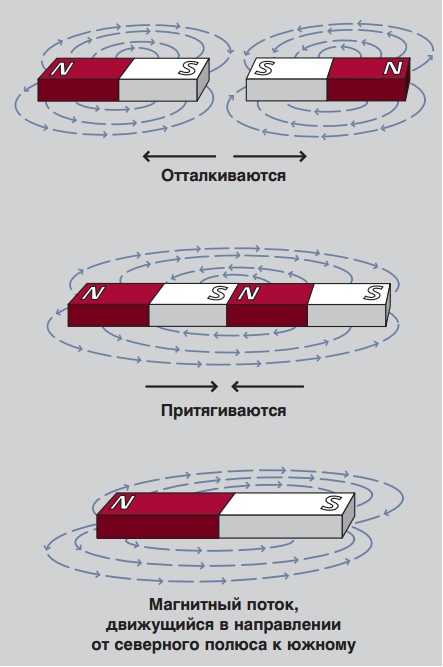
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
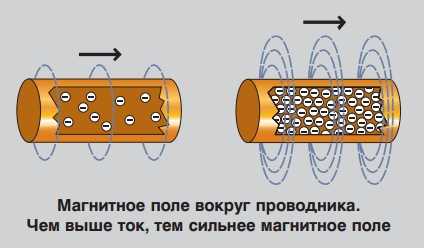
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
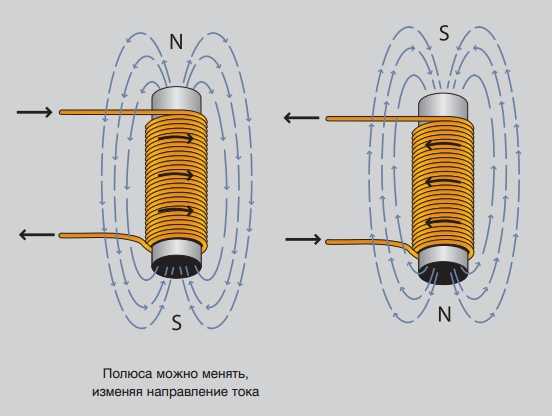
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
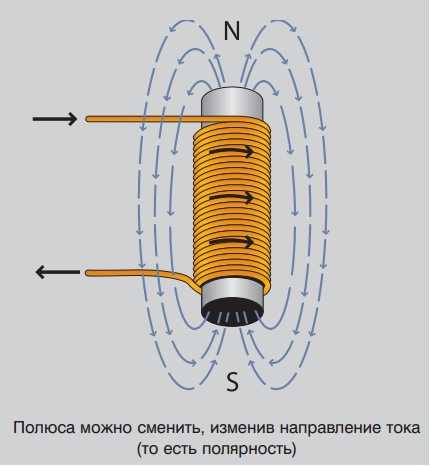
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
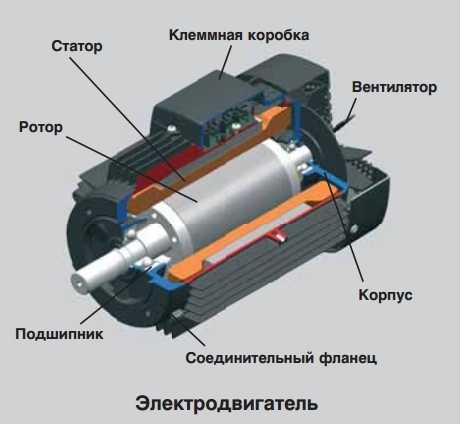
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
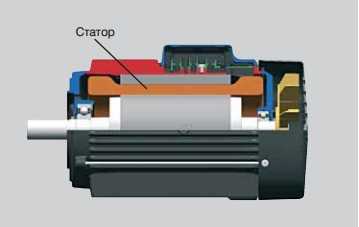
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
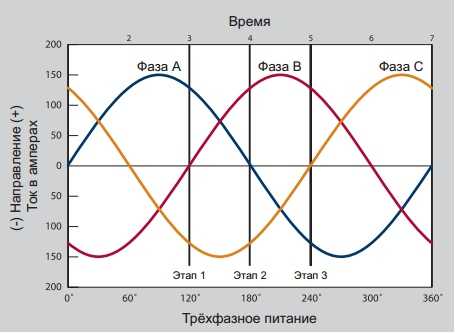
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
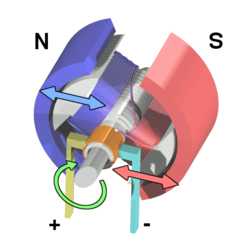
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

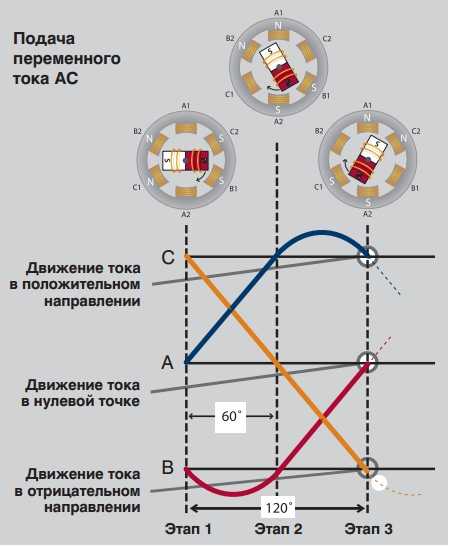
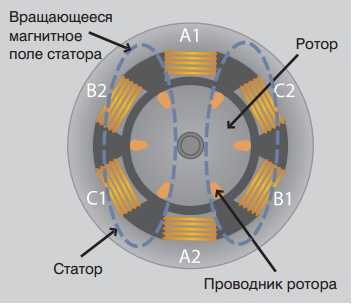
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
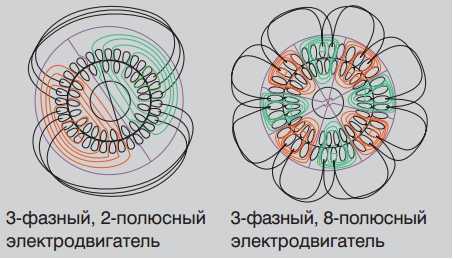
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
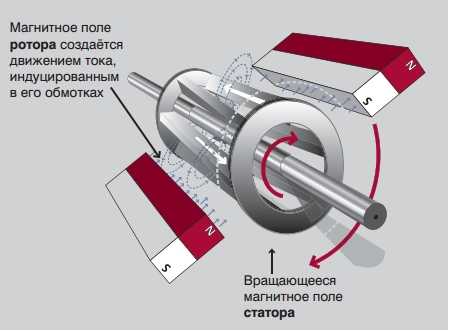
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
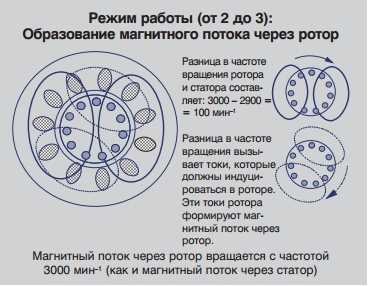
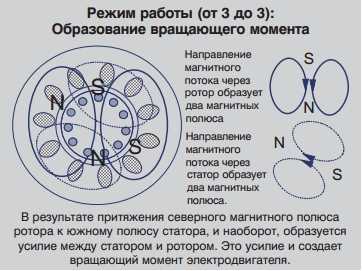
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
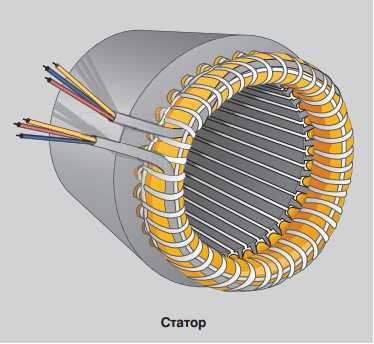
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
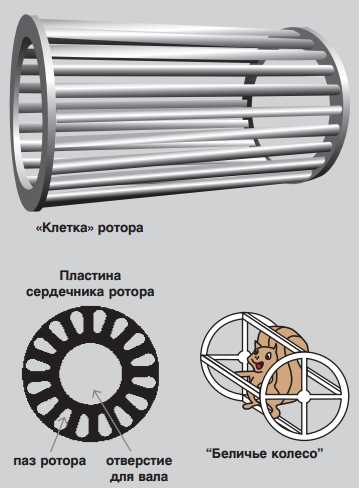
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Число полюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
2 | 3000 | 3600 |
4 | 1500 | 1800 |
6 | 1000 | 1200 |
8 | 750 | 900 |
12 | 500 | 600 |
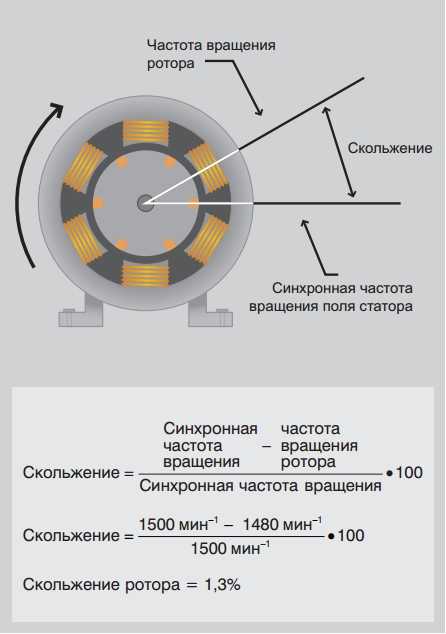
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.
Зависимость частоты от числа пар полюсов
Дата публикации: .
Категория: Электротехника.
При рассмотрении вопроса о получении переменного тока указывают, что за один оборот ротора индуктированная в проводниках обмотки генератора электродвижущая сила (ЭДС) имела один период. Если ротор генератора делает, например 5 об/сек, то ЭДС будет иметь 5 пер/сек или частота тока генератора будет равна 5 Гц. Следовательно, число оборотов в секунду ротора генератора численно равно частоте тока.
Частота тока f выражается следующим соотношением:
где n – число оборотов ротора в минуту.
Для получения от генератора стандартной частоты тока – 50 Гц ротор должен делать 3000 об/мин, то есть
Однако наши рассуждения были справедливы только для двухполюсного генератора, то есть для машины с одной парой полюсов p.
Если машина четырехполюсная, то есть число пар полюсов равно двум: p = 2 (рисунок 1), то один полный период изменения тока будет иметь место за пол-оборота ротора (1 – 5 положения проводника на чертеже). За второй полуоборот ротора ток будет иметь еще один период. Следовательно, за один оборот ротора четырехполюсной машины ток в проводнике имеет два периода. В шестиполюсной машине (p = 3) ток в проводнике за один оборот ротора будет иметь три периода.
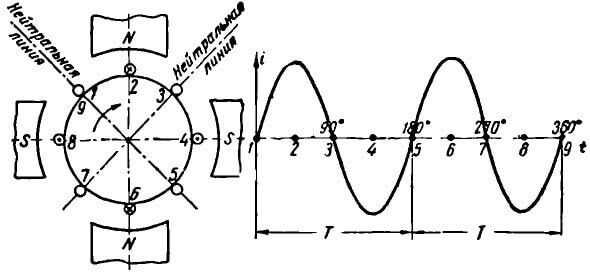
Рисунок 1. Изменение переменного тока в проводнике ротора четырехполюсного генератора
Таким образом, для машин, имеющих p пар полюсов, частота тока при об/сек будет в p раз больше, чем для двухполюсной машины, то есть
Отсюда формула зависимости скорости вращения от частоты и числа пар полюсов будет иметь следующий вид:
Пример 1. Определить частоту переменного тока, получаемого от генератора с восемью полюсами (p = 4), скорость вращения ротора которого n = 750 об/мин. Подставляя в формулу для определения частоты тока значение p и n получим:
Пример 2. Определить скорость вращения ротора двадцатиполюсного генератора (p = 10), если частотомер показал частоту тока f = 25 Гц. Подставляя в формулу для определения числа оборотов ротора n значения p и f, получим:
Пример 3. Скорость вращения ротора асинхронного двигателя, составляет 250 об/мин. Определить число пар полюсов асинхронного двигателя, если частота тока питающей сети равна 50 Гц:
Следовательно, двигатель имеет 24 полюса.
Источник: Кузнецов М. И., «Основы электротехники» — 9-е издание, исправленное — Москва: Высшая школа, 1964 — 560 с.
www.electromechanics.ru
Полюса электродвигателя
Электродвигатель постоянного тока – устройство, преобразующее электрическую энергию в механическую. Принцип работы такого электродвигателя основан на вращении магнитного поля.
Число пар полюсов электродвигателя
- Число пар полюсов электродвигателя определяет скорость, с которой будет вращаться вал мотора. Расчет производится с использованием специальных формул. При предельно допустимой нагрузке скорость вращения может незначительно замедлиться из-за скольжения. Скорость скольжения также рассчитывается при использовании соответствующих формул.
- Для работы синхронного электродвигателя необходимо обеспечить равное количество численности полюсов и рабочей обмотки. То же относится и к асинхронному электродвигателю.
- Причем короткозамкнутый ротор в асинхронном электродвигателе может отлично работать и при разном числе полюсов статорной обмотки.
- Асинхронный электродвигатель Доливо-Добровольского на полюсах статора имеет три обмотки. Внутри статора закреплен ротор. Три полюса магнитного тока могут создавать соответствующее вращение, если обмотки соединить особым образом и подключить мотор к трехфазной сети.
- На внутреннем кольце полюса, который обращен к ротору, суммарный магнитный поток перенаправится от полюса второй катушки к полюсу третьей катушки.
- Соответственно суммарный магнитный поток может менять свое направление, если изменить направление тока в обмотке статора, или полюсов. В результате получится асинхронный электродвигатель.
Доверяйте все работы профессионалам
Если Вы купили электродвигатель, его монтажом, техническим обслуживанием или ремонтом могут заниматься только специалисты с соответствующим уровнем технической подготовки.
Менять самостоятельно обмотку или заменять потоки направляющей энергии в полюсах нельзя. Вы автоматически потеряете гарантию производителя и последующий ремонт, возможно капитальный, будете проводить за свой счет.
Производители электродвигателей предлагают потребителям огромный ассортимент электродвигателей с разной мощностью и скоростью вращения вала. Из такого разнообразия, наверняка, можно выбрать электродвигатель, который будет полностью соответствовать Вашим требованиям, и выполнять поставленные задачи.
При покупке электродвигателя в компании «РДЭ» Вы можете получить консультацию продавца по подбору электродвигателя с любым количеством полюсов по тел. (495) 668 32 90.
Просмотров: 8179
Дата: Воскресенье, 15 Декабрь 2013
www.rosdiler-electro.ru
Определение технических характеристик асинхронного двигателя
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя, которые не приводятся на щитке электродвигателя, а именно: число пар полюсов (число пар катушек на фазу), скольжение при номинальной нагрузке, полной мощности, активной мощности и потере в двигателе при номинальной нагрузке.
Пример.
На щитке асинхронного двигателя с короткозамкнутым ротором типа АИР71В4У2 имеются следующие обозначения:

- ∆/Y – схема соединения обмоток двигателя;
- 220/380 В; 3,4/1,94 А — при схеме соединения обмоток статора в треугольник, мы должны подключатся к напряжению 220 В, при схеме соединения обмоток статора в звезду подключаем напряжение 380 В, соответственно и переменный ток будет равен для соединения в треугольник при напряжении 220 В – 3,4 А, а при схеме соединения в звезду – 1,94 А.
Проверить данные по току, можно рассчитав по формулам:
Для схемы соединения треугольник:
Для схемы соединения звезда:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % — коэффициент полезного действия, характеризуется отношением номинальной (полезной) мощности развиваемой на валу, к активной мощности, потребляемой им из сети. Определяется по формуле:
- сosϕ = 0,78 – коэффициент мощности, для вычисления его достаточно активную мощность Р, разделить на полную мощность S:
Разобравшись какие технические данные представлены на щитке двигателя, перейдем теперь непосредственно к определению величин, о которых шла речь в начале статьи.
1. Определяем число пар полюсов по формуле:
Если нужно знать количество полюсов, формула будет иметь такой вид:
где:
f = 50 Гц – частота переменного тока;
2. Определяем скольжение при номинальной нагрузке:
где:
n1 – синхронная скорость двигателя, зависящая от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определяем полную мощность двигателя при номинальной нагрузке:
4. Определяем активную мощность, потребляемая двигателем при номинальной нагрузке:
5. Определяем потери в двигателе при номинальной нагрузке:
Поделиться в социальных сетях
raschet.info
число пар полюсов асинхронного двигателя
число пар полюсов асинхронного двигателя
Автор Select . задал вопрос в разделе Техника
Что такое полюс электродвигателя? и получил лучший ответ
Ответ от Releboy[гуру]
Как это у АД нет полюсов? А работает он на внутреннем сгорании, что ли? Понятие полюс АД является величиной расчетной. У асинхронного двигателя число пар полюсов определяется р = (60*f) / n1
или для частоты f = 50 Герц число полюсов соответствует синхронной частоте АД:
•4 полюса = ~ 1500 об/мин
•6 полюсов = ~ 1000 об/мин
•8 полюсов = ~ 750 об/мин
Конструктивно число полюсов АД формируется исключительно схемой обмотки статора — числом пазов в статоре и количеством слоев в пазе. У трехфазного АД число пазов в статоре всегда кратно 6. Визуально для трехфазного двигателя число пар полюсов определяется так — достаточно подсчитать число пазов на статоре, поделить на три (фазы) , затем на 2 (пары полюсов) и на число катушечных групп (количества обмоток соединенных последовательно и параллельно — для этого необходимо знать схему обмотки). У двигателей с состредоточенными обмотками все наглядно.
Переключение схем обмоток позволяет изменять число пар полюсов и соответственно скорость двигателя. В последние годы разработаны схемы обмоток, дающие возможность путем переключения катушечных групп изменять числа полюсов и в отношении, отличном от 1:2, с сохранением достаточно высокого обмоточного коэффициента для обеих частот вращения и числа выводных концов обмотки (не более шести). Особенность этих схем заключается в специфической компоновке катушечных групп из разновитковых катушек, при которой изменение точек подсоединения обмотки к питающей сети приводит не только к изменению полярности отдельных катушечных групп, но и к переключению групп между фазами или даже к отключению отдельных катушек. При переключениях изменяется и амплитуда МДС обмотки при разных числах полюсов, поэтому такой метод построения схем называют полюсно-амплитудной модуляцией (ПАМ). Для трехскоростных и четырехскоростных асинхронных двигателей используют оба принципа изменения числа полюсов: устанавливают две независимые обмотки, каждая из которых (в четырехскоростных) или одна из них (в трехскоростных двигателях) выполняется полюснопереключаемой.
Releboy
Гений
(89801)
Я рад.
Привет! Вот подборка тем с ответами на Ваш вопрос: Что такое полюс электродвигателя?
Ответ от Twoloud[гуру]
у ад нет полюсов
Ответ от Ётарший брат[гуру]
Ответ от Георгий Гончаренко[гуру]
какие там полюса?
Ответ от Геннадий Соболев[активный]
У любого магнита есть пара полюсов. Благодаря электромагнитной индукции АД и работает. Естественно, на каждой фазе возникает пара полюсов- S и N. При увеличении пар полюсов на одной фазе, кратно уменьшается количество оборотов двигателя.
Ответ от 2 ответа[гуру]
Привет! Вот еще темы с похожими вопросами:
Асинхронная машина на Википедии
Посмотрите статью на википедии про Асинхронная машина
Ответить на вопрос:
2oa.ru
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица. Поделиться:
| ||||
dpva.ru
Электродвигатель постоянного тока — Википедия
 Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным роторомЭлектродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
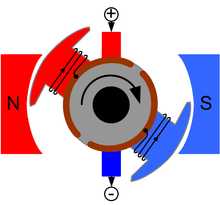 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 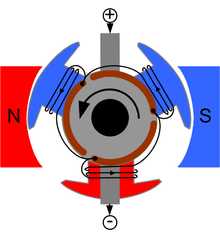 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Двигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅
ru.wikipedia.org
