Полюса электродвигателя
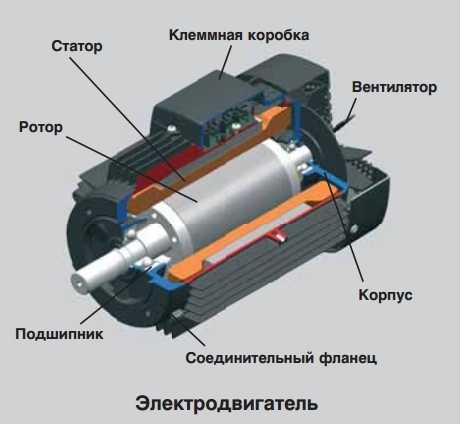
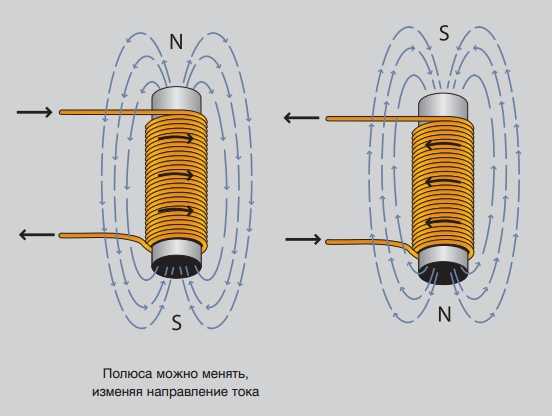
Электродвигатель постоянного тока – устройство, преобразующее электрическую энергию в механическую. Принцип работы такого электродвигателя основан на вращении магнитного поля.
Число пар полюсов электродвигателя
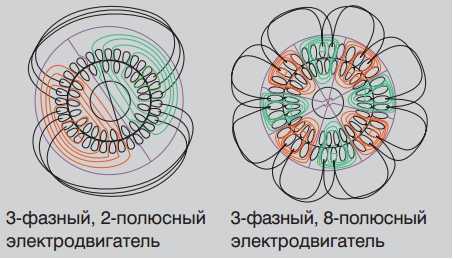
- Число пар полюсов электродвигателя определяет скорость, с которой будет вращаться вал мотора. Расчет производится с использованием специальных формул. При предельно допустимой нагрузке скорость вращения может незначительно замедлиться из-за скольжения. Скорость скольжения также рассчитывается при использовании соответствующих формул.
- Для работы синхронного электродвигателя необходимо обеспечить равное количество численности полюсов и рабочей обмотки. То же относится и к асинхронному электродвигателю.
- Причем короткозамкнутый ротор в асинхронном электродвигателе может отлично работать и при разном числе полюсов статорной обмотки.
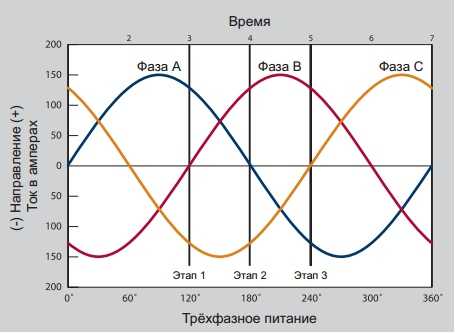
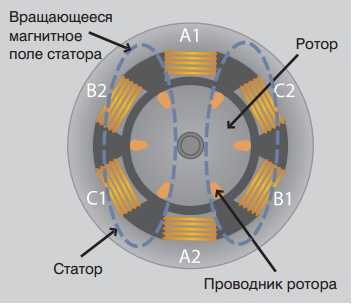
- Асинхронный электродвигатель Доливо-Добровольского на полюсах статора имеет три обмотки. Внутри статора закреплен ротор. Три полюса магнитного тока могут создавать соответствующее вращение, если обмотки соединить особым образом и подключить мотор к трехфазной сети.
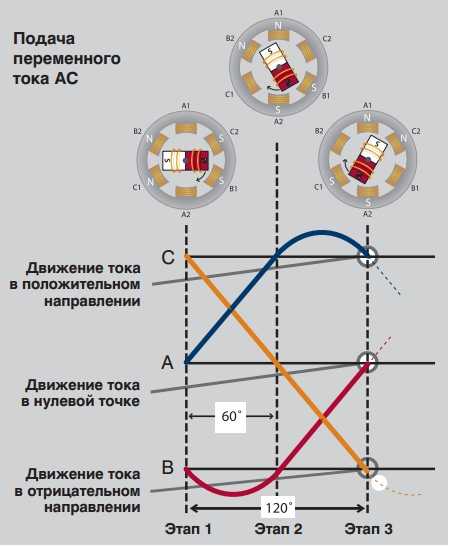
- На внутреннем кольце полюса, который обращен к ротору, суммарный магнитный поток перенаправится от полюса второй катушки к полюсу третьей катушки.
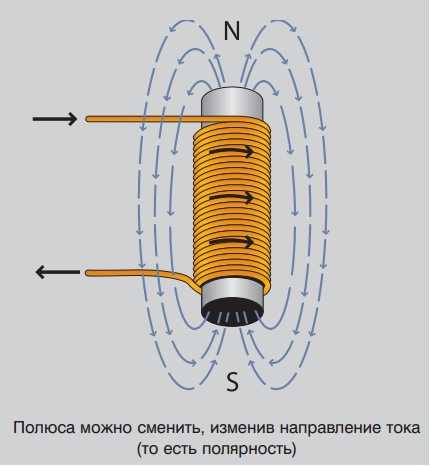
- Соответственно суммарный магнитный поток может менять свое направление, если изменить направление тока в обмотке статора, или полюсов. В результате получится асинхронный электродвигатель.
Доверяйте все работы профессионалам
Если Вы купили электродвигатель, его монтажом, техническим обслуживанием или ремонтом могут заниматься только специалисты с соответствующим уровнем технической подготовки.
Менять самостоятельно обмотку или заменять потоки направляющей энергии в полюсах нельзя. Вы автоматически потеряете гарантию производителя и последующий ремонт, возможно капитальный, будете проводить за свой счет.
Производители электродвигателей предлагают потребителям огромный ассортимент электродвигателей с разной мощностью и скоростью вращения вала. Из такого разнообразия, наверняка, можно выбрать электродвигатель, который будет полностью соответствовать Вашим требованиям, и выполнять поставленные задачи.
При покупке электродвигателя в компании «РДЭ» Вы можете получить консультацию продавца по подбору электродвигателя с любым количеством полюсов по тел. (495) 668 32 90.
Просмотров: 7544
Дата: Воскресенье, 15 Декабрь 2013
www.rosdiler-electro.ru
Зависимость частоты от числа пар полюсов
Дата публикации: .
Категория: Электротехника.
При рассмотрении вопроса о получении переменного тока указывают, что за один оборот ротора индуктированная в проводниках обмотки генератора электродвижущая сила (ЭДС) имела один период. Если ротор генератора делает, например 5 об/сек, то ЭДС будет иметь 5 пер/сек или частота тока генератора будет равна 5 Гц. Следовательно, число оборотов в секунду ротора генератора численно равно частоте тока.
Частота тока f выражается следующим соотношением:
где n – число оборотов ротора в минуту.
Для получения от генератора стандартной частоты тока – 50 Гц ротор должен делать 3000 об/мин, то есть
Однако наши рассуждения были справедливы только для двухполюсного генератора, то есть для машины с одной парой полюсов p.
Если машина четырехполюсная, то есть число пар полюсов равно двум: p = 2 (рисунок 1), то один полный период изменения тока будет иметь место за пол-оборота ротора (1 – 5 положения проводника на чертеже). За второй полуоборот ротора ток будет иметь еще один период. Следовательно, за один оборот ротора четырехполюсной машины ток в проводнике имеет два периода. В шестиполюсной машине (p = 3) ток в проводнике за один оборот ротора будет иметь три периода.
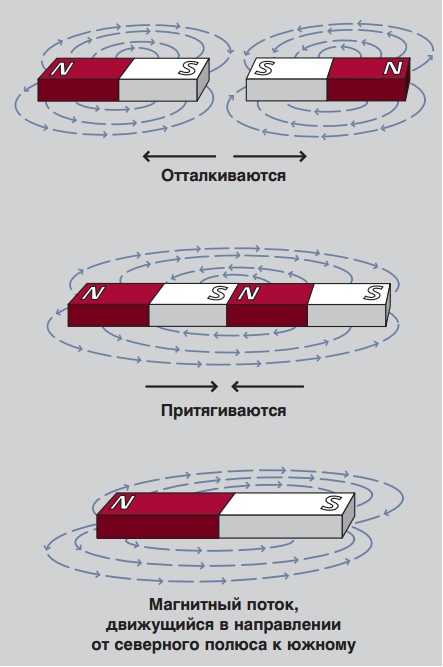
Рисунок 1. Изменение переменного тока в проводнике ротора четырехполюсного генератора
Таким образом, для машин, имеющих p пар полюсов, частота тока при об/сек будет в p раз больше, чем для двухполюсной машины, то есть
Отсюда формула зависимости скорости вращения от частоты и числа пар полюсов будет иметь следующий вид:
Пример 1. Определить частоту переменного тока, получаемого от генератора с восемью полюсами (p = 4), скорость вращения ротора которого n = 750 об/мин. Подставляя в формулу для определения частоты тока значение p и n получим:
Пример 2. Определить скорость вращения ротора двадцатиполюсного генератора (p = 10), если частотомер показал частоту тока f = 25 Гц. Подставляя в формулу для определения числа оборотов ротора n значения p и f, получим:
Пример 3. Скорость вращения ротора асинхронного двигателя, составляет 250 об/мин. Определить число пар полюсов асинхронного двигателя, если частота тока питающей сети равна 50 Гц:
Следовательно, двигатель имеет 24 полюса.
Источник: Кузнецов М. И., «Основы электротехники» — 9-е издание, исправленное — Москва: Высшая школа, 1964 — 560 с.
www.electromechanics.ru
Определение технических характеристик асинхронного двигателя
В данное статье речь пойдет о расчете таких технических характеристик асинхронного электродвигателя, которые не приводятся на щитке электродвигателя, а именно: число пар полюсов (число пар катушек на фазу), скольжение при номинальной нагрузке, полной мощности, активной мощности и потере в двигателе при номинальной нагрузке.
Пример.
На щитке асинхронного двигателя с короткозамкнутым ротором типа АИР71В4У2 имеются следующие обозначения:
- ∆/Y – схема соединения обмоток двигателя;
- 220/380 В; 3,4/1,94 А — при схеме соединения обмоток статора в треугольник, мы должны подключатся к напряжению 220 В, при схеме соединения обмоток статора в звезду подключаем напряжение 380 В, соответственно и переменный ток будет равен для соединения в треугольник при напряжении 220 В – 3,4 А, а при схеме соединения в звезду – 1,94 А.
Проверить данные по току, можно рассчитав по формулам:
Для схемы соединения треугольник:
Для схемы соединения звезда:
- 0,75 кВт – номинальная (полезная) мощность;
- n2 = 1350 об/мин – частота вращения электродвигателя при номинальной нагрузке в минуту;
- КПД = 75 % — коэффициент полезного действия, характеризуется отношением номинальной (полезной) мощности развиваемой на валу, к активной мощности, потребляемой им из сети. Определяется по формуле:
- сosϕ = 0,78 – коэффициент мощности, для вычисления его достаточно активную мощность Р, разделить на полную мощность S:
Разобравшись какие технические данные представлены на щитке двигателя, перейдем теперь непосредственно к определению величин, о которых шла речь в начале статьи.
1. Определяем число пар полюсов по формуле:
Если нужно знать количество полюсов, формула будет иметь такой вид:
где:
f = 50 Гц – частота переменного тока;
2. Определяем скольжение при номинальной нагрузке:
где:
n1 – синхронная скорость двигателя, зависящая от числа пар полюсов, так для одной пары полюсов – 3000 об/мин, для двух пар – 1500 об/мин, для трех пар – 1000 об/мин.
3. Определяем полную мощность двигателя при номинальной нагрузке:
4. Определяем активную мощность, потребляемая двигателем при номинальной нагрузке:
5. Определяем потери в двигателе при номинальной нагрузке:
Поделиться в социальных сетях
raschet.info
Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
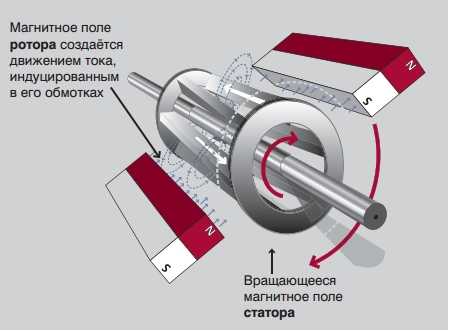
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.

Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).

А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
zametkielectrika.ru
Полюсы электродвигателя — Справочник химика 21
Номинальные числа оборотов у электродвигателей переменного тока зависят от числа пар полюсов электродвигателя и частоты переменного [c.57]Вибрационный контроль. Анализируя спектрограмму вибрации (см. рис. 20), можно составить достаточно полное представление о процессах, происходящих в насосе, поэтому вибрацию при испытаниях целесообразно измерять и анализировать всегда. С помощью измерения вибрации легко установить границы применения насоса по параметрам подаче, давлению на входе, углу разворота лопастей (последнее — в случае поворотнолопастных насосов). Повышенная вибрация на основной частоте, на частотах, кратных 2—4 основной, а также г основной (г — число элементов узла по окружности пальцев муфты, полюсов электродвигателя, лопаток и т. д.), может свидетельствовать о неуравновешенности ротора гидравлическом небалансе (в крупных насосах) изломе линии вала (в насосах с составным валом или с удлинителем) [c.196]
Насос, построенный по принципу воздуходувки Рутса, состоит из двух фигурных роторов (фиг. 332), которые вращаются синхронно с большой сжоростью. Между роторами и между ротором и стенкой корпуса. зазор составляет 0,4—0,8 мм (в ласосах типа ДВН) и вращение производится без трения и без смазки. Такая конструкция насоса позво-ляет осущ ествлять большое число, оборотов от 1000 до 3000 в минуту. Корпус вместе с роторами может находиться в общей камере с электродвигателем, зубчатой передачей и. масляным насосом для смазки передаточного механизма. При такой конструкции все элементы насоса находятся в вакууме, благодаря чему значительно упрощается уплотнение насоса. Напряжение электродвигателя при этом не должно превышать 45 в, так как в противном случае может возникнуть искрение внутри насоса — пробой между полюсами электродвигателя. При вращении между роторами и стенкой дважды в течение одного оборота образуется замкнутое пространство, в котором находится воздух из впускного патрубка насоса. При дальнейшем вращении ротора воздух из замкнутого объема выталкивается в выпускной патрубок. Эффективность работы насоса зависит от количества газа, которое будет перетекать через зазоры в обратном направлении. Наибольшая скорость откачки достигается, когда длина среднего свободного пробега молекул становится значительно больше размера зазора между роторами и стенкой (достигает нескольких миллиметров). В этом случае сопротивление зазора сильно возрастает и уменышается обратное перетекание газа. Для работы в наиболее выгодной о-бласти давлений двухроторный насос нуждается в создании предварительного разрежения, т. е. должен работать совместно с форвакуумным насосом. [c.467]
Системы регулирования возбуждения приводных электродвигателей клетей непрерывных станов холодной прокатки так же, как на обжимных станах горячей прокатки и на чистовых клетях непрерывных станов горячей прокатки, выполняются в последние годы по так называемому зависимому принципу. Существо такой системы регулирования заключается в том, что ослабление магнитного потока главных полюсов электродвигателя начинается только после достижения напряжением на якоре электродвигателя значения, равного 0,95 от номинального. Такой способ регулирования дает большие преимущества против ранее применявшихся систем предварительного ослабления потока электродвигателя, а именно разгон привода производится всегда при полном моменте электродвигателя, следовательно, потребление тока от преобразователя минимально и минимальны потери энергии в тиристорном преобразователе и электродвигателе. Для соответствующего регулирования токов в обмотках возбуждения ОВ-М2-1, ОВ-М2-2 (см. рис. VI.23) в М2-САР подаются сигналы обратной связи по току возбуждения с шунтов Ши В, а также сигнал, пропорциональный напряжению на якоре электродвигателя (снимается с резисторов Я и подается в М2-САР через датчик напряжения ДН), и сигнал, пропорциональный току якоря (снимается через датчик тока ДТ с шунта в якорной цепи Шн). Напряжение с датчика тока ДТ, пропорциональное току якоря, используется также для регулирования этого тока с помощью контура регулирования в М2-САР. С шунта Ш подается также сигнал в регулятор деления нагрузки РДН (описание функции РДН см. выше). Один из двух разнополярных сигналов от РДН подается на один из выходов М2-САР. Управляющее напряжение с выхода М2-САР подается на входы систем импульсно-фазового управления силовых мостов 1В, 2В, 1Н, 2Н якорного тиристорного преобразователя и возбудителя М2-КВУ. [c.164]
I —частота сети в гц р —число пар полюсов электродвигателя. [c.184]
Тяговую цепь от замыкания на землю и кругового огня на тяговых электродвигателях защищает реле заземления. Защита балластного и тормозных резисторов от перегрузки производится максимальными реле, настраиваемыми на токи срабатывания (1, 2 — 1,25)/д. Срабатывание защитных реле приводит к отключению электрического тормоза и замене его пневматическим. Защита по минимальному току мотор-вентиляторов осуществляется двумя реле, включенными на падение напряжения на обмотках главных и добавочных полюсов электродвигателей вентиляторов, отключая электрический тормоз при срабатывании. [c.205]
Pl == 2 — число пар полюсов электродвигателя напорного насоса [c.127]
Частота Яс вращения ротора синхронного двигателя кратна частоте электрического тока сети, питающей двигатель Пс=60//р, где f — чач ота тока электрической сети р — число пар полюсов электродвигателя. [c.201]
При заданной частоте питающего тока частота вращения зависит от числа пар полюсов электродвигателя [см. формулу [c.63]
Опасность пробоя между полюсами электродвигателя (поскольку он помещен в откачиваемую камеру) устраняется тем, что рабочее напряжение равно всего 42 в. [c.93]
Процессы дозирования жидких и сыпучих компонентов осуществляются в автоматическом (с помощью компьютеров) или в ручном режиме. Для взвешивания компонентов применяются весоизмерите-ли, контролируемые иа тензодатчиках. Дозировка сыпучих компонентов проводится при двух скоростях путем перемены полюсов электродвигателя транспортера или питателя, т. е. осуществляется грубое и тонкое дозирование. [c.232]
Для возможности регулирования числа оборотов асинхронных двигателей посредством переключения обмоток на различное число пар полюсов электродвигатели должны иметь специально выполненную обмотку на статоре, переключаемую во время работы двигателя а различные схемы. Благодаря этому скорость вращения изменяется ступенями соответственно числу пар полюсов. Двигатели этого типа строятся двух-, трех- и четырехскоростными. [c.114]
Рассмотрим работу кондиционера в режиме кондиционер— слабо (рис. 140,6). При установке ключа КР в это положение замыкаются контакты КР-1 и КР-3. Включение двигателя вентилятора ДВ на малую скорость обеспечивается дополнительной обмоткой ДО, которая увеличивает число пар пол
www.chem21.info
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
dpva.ru
Схема простой катушечной обмотки — Ремонт электрических машин
Схема простой катушечной обмотки представляет собой несколько катушечных групп, каждая из которых состоит из двух катушек, соединенных на участке, обозначенном буквой А.
Катушечные группы в свою очередь соединены друг с другом перемычками Б. Количество полюсов электродвигателя и катушечных групп определяют по данным, приведенным в таблице. У показанного на рисунке статора с числом пазов 24 на каждый полюс приходится 24/4 = 6 пазов.
Схема простой катушечной обмотки
Схема простой катушечной обмотки:
а — развертка, б — вид с торца;
Н — начало обмотки, К — конец обмотки.
Каждый полюс должен образовываться тремя фазами обмотки, поэтому на каждую из фаз в каждом полюсе приходится по 6/3 = 2 паза.
Эта величина называется числом пазов на полюс — фазу, обозначается буквой q и может быть определена по формуле:
где: z — число пазов статора; 2р — число полюсов электродвигателя; m — число фаз.
Зависимость количества полюсов и катушечных групп от числа оборотов электродвигателя
| Синхронное число оборотов вращающегося магнитного поля | Примерное число оборотов ротора* электродвигателя в минуту | Количество полюсов | Количество катушечных групп в трех фазах** |
| 3000 | 2920 | 2 | 3 |
| 1500 | 1440 | 4 | 6 |
| 1000 | 960 | 6 | 9 |
| 750 | 720 | 8 | 12 |
| 600 | 575 | 10 | 15 |
| 500 | 480 | 12 | 18 |
* Число оборотов ротора асинхронного электродвигателя всегда меньше синхронного числа оборотов вращающегося магнитного поля вследствие явления «скольжения». Величина скольжения ротора тем больше, чем больше номинальная скорость вращения и нагрузка двигателя.
** Количество катушечных групп приведено для концентрической («неразваленной») обмотки.
«Ремонт электрооборудования промышленных предприятий»,
В.Б.Атабеков
К токособирательной системе электрических машин относят коллекторы, контактные кольца, щеткодержатели с траверсами и щеткоподъемным механизмом, короткозамыкающие кольца фазных роторов старых конструкций. В процессе работы машины отдельные элементы токособирательной системы изнашиваются, вследствие чего нарушается ее нормальная работа. Наиболее распространенными дефектами токособирательной системы являются: недопустимый износ коллектора и контактных колец, появление на их рабочих поверхностях неровностей и…
Степень износа подшипников качения определяют, измеряя их радиальные и аксиальные (осевые) зазоры на несложных приспособлениях, изготовляемых в мастерских электроцеха предприятия. Для замера на таком приспособлении радиального зазора подшипник 11 устанавливают на вертикальной плите 8 приспособления. Наложив на внутреннее кольцо 2 подшипника стальную шланку 10, закрепляют его гайкой, навернутой на стержень 9 приваренный к вертикальной плите;…
В практике ремонта электрических машин нередко возникает необходимость в расчете обмоток или пересчете их на новые параметры. Расчеты обмоток производят обычно при отсутствии у электродвигателя, подлежащего ремонту, паспортных данных или в случае поступления в ремонт двигателя без обмотки. Потребность в пересчете обмоток возникает также при необходимости изменения числа оборотов или напряжения, переделке односкоростных двигателей на…
Неровности, дорожки на поверхности коллектора устраняют полировкой, шлифовкой или обточкой. Выбор способа устранения этих дефектов при ремонте зависит от величины выработки. При выработке до 0,2 мм применяют полировку, до 0,5 мм — шлифовку, свыше 0,5 мм — обточку. Обточку и шлифовку коллектора выполняют на токарных станках или при помощи переносных приспособлений. При обточке коллектора скорость…
При незначительных повреждениях на поверхности дорожек качения или шариков (роликов) подшипник может быть вновь использован, при значительных повреждениях подшипник заменяют новым. В некоторых случаях у подшипников качения вследствие выкрашивания металла на дорожках качения повреждаются сепараторы. В этом случае подшипник заменяют новым. Подшипники заменяют новыми также при следующих неустранимых дефектах, определяемых внешним осмотром: сколы или трещины…
www.ktovdome.ru
