Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Формула расчета частоты вращений
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:Расчётные формулы электродвигателей
Расчётные формулы электродвигателей
Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а
где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в.
Синхронное число оборотов электродвигателя
где р —число пар полюсов обмотки статора электродвигателя, f — частота.
Номинальное число оборотов асинхронного электродвигателя
где s — скольжение асинхронного электродвигателя, %.
Скольжение асинхронного электродвигателя, %
Номинальный момент вращения электродвигателя, кГ·м
где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ.
Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек
где квт — сумма потерь в электродвигателе.
Окружная скорость (шкива, вала, коллектора, ротора), м/сек.
где D — диаметр соответствующего элемента машины, м.
Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора
где прег — пониженное число оборотов двигателя в минуту;
ηрег — к. п. д. при пониженном числе оборотов.
Соотношения между единицами измерения работы
Соотношения между единицами измерения мощности
От чего зависит частота вращения электродвигателя. Регулирование скорости вращения асинхронных электродвигателей
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.
Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель.
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигател я
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса — это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема, которая входит в игру с характеристиками асинхронного электродвигателя (которая имеет косвенное влияние на энергопотребление) называется «Коэффициент Мощности «. Некоторые
коммунальные предприятия обязывают клиентов платить дополнительные сборы за низкие значения
коэффициентов мощности. П
| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица. Поделиться:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Мощность и вращающий момент электродвигателя. Что это такое?
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.
Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.
P1 (кВт) Входная электрическая мощность насосов — это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя — это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
Определение количества оборотов электродвигателя
Довольно часто во время проведения работ необходимо точно знать, сколько оборотов делает
асинхронный двигатель.
Кстати, такую задачу не все электрики могут решить. Хотя сложного в этом ничего нет.
Определяем вид двигателя по обмотке
Для того чтобы определить тип двигателя по обмотке, с него необходимо снять заднюю крышку. Полумуфта и шкив нет необходимости снимать. Убираем охладительный кожух, а также крыльчатку, для того, чтобы открыть доступ к крышке электродвигателя. После того, как крышку уберете, вы увидите обмотку все целиком. Посмотрите, как размещена одна секция по отношению к стартеру. Если катушка распределена на 180-ти градусах, то этот двигатель совершает 3000 оборотов в минуту.
Если вы видите, что вокруг стартера ляжет 3 пролета обмотки (сто двадцать градусов), то эти электродвигатели 1500 оборотов в минуту способны выполнять. В том случае, если в окружности стартера поместится 4 секции (девяносто градусов), то такой двигатель имеет скорость работы, равный тысяче оборотов в минуту.
Вот таким нехитрым методом мы легко можем обозначить скорость работы электродвигателя. Такой метод прекрасно подойдет для тех двигателей, в которых обмотка распределяется по пролетам.
Определение числа оборотов при помощи миллиамперметра
Существует еще несколько способов определения числа оборотов. Ротор электрического двигателя обладает магнитным полем. Это магнитное поле наводит ЭДС в стартерной обмотке во время вращения ротора. С помощью миллиамперметра ЭДС можно легко «словить».
Мы должны произвести следующие действия:
- Находим одну фазу (вернее ее обмотку). Нет разницы, каким образом будут соединяться обмотки: в виде треугольника или звезды.
- Кончики обмотки подключаем к миллиамперметру.
- Вращаем вал электродвигателя.
- Следим за количеством отклонений стрелки прибора во время одного оборота ротора:
2 раза – двигатель делает 2300 оборотов в минуту;
4 раза – 1500 оборотов;
6 раз – 1000 оборотов;
8 раз – 750 оборотов.
Категория: Статьи | Просмотров: 1541
Теги: двигатель, электродвигатель, обмотка двигателя
Расстояние Скорость Формула времени
Скорость — это мера того, насколько быстро объект перемещается из одного места в другое. Он равен пройденному расстоянию, деленному на время. Можно найти любое из этих трех значений, используя два других. Эта картинка полезна:
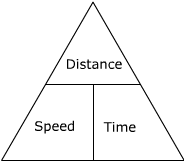
Позиции слов в треугольнике показывают, куда они должны идти в уравнениях. Чтобы найти скорость, расстояние в треугольнике находится в зависимости от времени, поэтому скорость — это расстояние, разделенное на время. Чтобы найти расстояние, скорость рядом со временем, поэтому расстояние — это скорость, умноженная на время.
 ,
,  ,
, 
 ,
,  ,
, 
с = скорость (м / сек)
d = пройденное расстояние (метры)
t = время (секунды)
Расстояние Скорость Время Формула Вопросы:
1) Собака перебегает из одной стороны парка в другую. Парк составляет 80,0 метров в поперечнике. Собаке нужно 16,0 секунд, чтобы пересечь парк. Какая скорость у собаки?
Ответ: Дается расстояние, которое проехала собака, и время, которое она занимает.Скорость собаки можно найти по формуле:

с = 5,0 м / с
Скорость собаки 5,0 метра в секунду.
2) Гольфмобиль движется со своей максимальной скоростью 27,0 км / ч в течение 10,0 минут. В метрах, как далеко проехал гольф-мобиль?
Ответ: Первый шаг к решению этой проблемы — изменить единицы измерения скорости и времени, чтобы найденный ответ был в метрах, так как это то, о чем спрашивает вопрос.Скорость:
с = 27,0 км / ч

с = 7,50 м / с
После пересчета единиц скорость равна 7,50 м / с. Время в пути:
.t = 10,0 мин

t = 600 с
Приведены скорость тележки и время в пути, поэтому пройденное расстояние можно найти по формуле:d = st
d = (7,50 м / с) (600 с)
d = 4500 м
Гольф-кар проехал 4500 м, что равно 4.50 км.
.Общие сведения о скорости поршня в высокопроизводительных двигателях
Скорость поршня обычно относится к средней или средней скорости поршня, когда он перемещается вверх и вниз в отверстии цилиндра во время каждого оборота коленчатого вала. Поскольку поршень фактически полностью останавливается в верхней части хода (ВМТ) и в нижней части хода (НМТ), его скорость и ускорение в любой заданной точке всегда меняются. Поршень всегда ускоряется или замедляется до нулевой скорости. Формула для средней скорости поршня дает среднюю скорость, основанную на удвоенном ходе (вверх и вниз за один оборот), умноженном на скорость двигателя (об / мин), деленную на 12 для преобразования в футы в минуту (fpm).Чтобы упростить формулу, разделите числитель и знаменатель на 2.
 Этот технический совет взят из полной книги PERFORMANCE AUTOMOTIVE ENGINE MATH. Подробное руководство по этому вопросу вы можете найти по этой ссылке:
Этот технический совет взят из полной книги PERFORMANCE AUTOMOTIVE ENGINE MATH. Подробное руководство по этому вопросу вы можете найти по этой ссылке:
 Этот технический совет взят из полной книги PERFORMANCE AUTOMOTIVE ENGINE MATH. Подробное руководство по этому вопросу вы можете найти по этой ссылке:
Этот технический совет взят из полной книги PERFORMANCE AUTOMOTIVE ENGINE MATH. Подробное руководство по этому вопросу вы можете найти по этой ссылке:УЗНАТЬ БОЛЬШЕ ОБ ЭТОЙ КНИГЕ
ПОДЕЛИТЬСЯ СТАТЬЕЙ: Пожалуйста, не стесняйтесь поделиться этой статьей на Facebook, на форумах или в любых клубах, в которых вы участвуете. Вы можете скопировать и вставить эту ссылку, чтобы поделиться: https: // musclecardiy.ru / производительность / понимание-скорость-поршень в высокопроизводительных двигателях /

Поршни бывают всех форм, размеров и сплавов. Расчет скорости поршня для любого конкретного применения имеет важное значение для безопасной работы двигателя.
Скорость поршня, фут / мин = ход x об / мин ÷ 6Давайте рассмотрим пример для Ford 302 с ходом 3 дюйма и максимальной частотой вращения двигателя 6000 об / мин.
Скорость поршня, фут / мин = 3 x 6000 ÷ 6 = 3000 фут / мин. Обратите внимание, что если вы не упростили формулу, ответ все равно останется прежним.Это расстояние, которое поршень проходит за одну минуту. Чтобы преобразовать ответ в миль в час, умножьте ответ на 60, чтобы получить футов в час.
Затем разделите на 5280, чтобы получить миль в час.
миль / ч = (средняя скорость x 60) ÷ футов на милю
миль / ч = (3000 x 60) ÷ 5280 = 34,09 миль / час
Максимальная скорость поршня
Вы можете получить очень близкое приближение к максимальной скорости поршня (без учета межцентрового расстояния и углового положения штока) по следующей формуле. Умножьте ход на пи и разделите на 12, чтобы получить фут на оборот.Затем умножьте на максимальную скорость двигателя, чтобы получить максимальное количество футов в минуту. Эта скорость возникает примерно в середине хода, когда шатун находится под углом девяноста градусов к шатунной шейке. До этого момента поршень ускоряется; после этого поршень замедляется. Когда поршень находится точно в верхней или нижней мертвой точке, он останавливается, и ускорение отсутствует. Используя формулу для средней скорости поршня, мы рассчитали 3000 футов в минуту или 34,09 миль в час для нашего Ford 302. Теперь давайте найдем максимальную скорость поршня при 6000 об / мин.
Максимальная скорость поршня = MPS
MPSfpm = (ход x π ÷ 12) x RPM
MPSfpm = (3,00 x 3,14 ÷ 12) x 6000 MPSfpm = (9,42 ÷ 12) x 6000 = 0,785 x 6000 = 4710 фут / мин
или
MPSfpm x 60 ÷ 5280 = MPH
4710 x 60 ÷ 5280 = 53,52 миль / ч

Формула линейной скорости (вращающийся объект)
Линейная скорость точки на вращающемся объекте зависит от ее расстояния от центра вращения. Угловая скорость — это угол, под которым объект движется за определенное время. Угловая скорость измеряется в радианах в секунду (рад / с). В полном круге 2π радиана. На расстоянии r от центра вращения точка на объекте имеет линейную скорость, равную угловой скорости, умноженной на расстояние r. Единицами линейной скорости являются метры в секунду, м / с.
линейная скорость = угловая скорость x радиус вращения
v = ωr
v = линейная скорость (м / с)
ω = угловая скорость (радиан / с)
r = радиус вращения (м)
Формула линейной скорости (вращающийся объект) Вопросы:
1) Электродрель включена и вращается со скоростью 10,0 оборотов в секунду (об / с). Диаметр сверла 4,00 мм. Какова линейная скорость точки на поверхности сверла в метрах в секунду?
Ответ: Первый шаг — найти угловую скорость сверла.Число оборотов в секунду необходимо перевести в радианы в секунду. В полном круге 2π радиана.
ω = 10,0 об / с


Расстояние между центром вращения и точкой на поверхности сверла равно радиусу. Диаметр сверла указан в миллиметрах. Радиус в метрах:


∴r = 0,002 м
Используя формулу v = ωr, линейная скорость точки на поверхности бурового долота равна
v = ωr
∴v = (62.8 радиан / с) (0,002 м)

Линейная скорость точки на поверхности сверла составляет приблизительно 0,126 м / с. Радианы — это единица измерения «заполнитель», поэтому они не включаются при записи решенного значения для линейной скорости.
2) Еще вопрос.
Датчик, подключенный к автомобильному колесу, измеряет линейную скорость. Датчик находится на 0,080 м от центра вращения. В этом положении датчик показывает, что линейная скорость колеса равна 8.00 м / с. Если радиус колеса составляет 0,220 м, какова линейная скорость на внешней кромке колеса?
Ответ: Линейная скорость различается на разных расстояниях от центра вращения, но угловая скорость одинакова на всем колесе. Чтобы решить эту проблему, сначала найдите угловую скорость, используя линейную скорость в положении датчика, 0,080 м. Формулу v = ωr можно переписать, чтобы найти угловую скорость ω:

Это также угловая скорость на внешней кромке колеса, где радиус r = 0.220 м. Формулу v = ωr можно снова использовать для определения линейной скорости на этом радиусе:
v = ωr
v = (100 рад / с) (0,220 м)
∴v = 22,0 м / с
Линейная скорость автомобильного колеса по внешнему краю 22,0 м / с.
.Калькулятор скорости
Как быстро я еду? — виды скорости
Скорость — неточный термин — есть несколько более точных значений, и их не следует путать друг с другом. Рассмотрим разницу между мгновенной скоростью , средней скоростью и скоростью вращения . Для целей двух первых мы попытаемся визуализировать это на примере вождения автомобиля.
Вы едете по длинной открытой трассе. Вы смотрите на спидометр вашего автомобиля; он читает 100 километров в час.Отсюда вы узнаете, как далеко вы проедете, если будете поддерживать постоянную скорость. Мы знаем, что на практике поддерживать постоянную скорость практически невозможно (хотя на шоссе с круиз-контролем это почти возможно), и наша скорость все время более или менее колеблется. Фактическое расстояние, которое вы преодолеете за час, — это среднее значение всех этих скоростей. Вывод — средняя скорость — это общее расстояние, пройденное за единицу времени (например, за час).
Итак, что на самом деле означает число, которое показывает ваш спидометр? Это ваша мгновенная скорость; ваша скорость в данный момент.Согласно определению из учебника, мгновенная скорость — это изменение положения объекта, x, между двумя моментами времени, t₁ и t₂ (где этот временной интервал приближается к нулю, то есть t₂ — t₁ -> 0).
Скорость вращения — это немного другой термин, относящийся скорее к вращающимся объектам, чем к объектам, которые меняют свое положение в пространстве. Соответственно, частота вращения — это количество полных оборотов, которые объект совершает за единицу времени .Он выражается в радианах в секунду (рад / с) или в оборотах в минуту (об / мин). Мы не будем больше останавливаться на этой теме, потому что это не является целью данного калькулятора скорости и расстояния. Если вы хотите узнать больше об угловой скорости, воспользуйтесь нашим калькулятором углового ускорения или калькулятором рациональной кинетической энергии.
.