| Мощность | Вт | 150 | 170 | 252 | 252 | 400 | 400 | 720 | 720 |
| Номинальное напряжение | В | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Номинальный крутящий момент | Нм | 0,25 | 0,45 | 0,77 | 1,29 | 1,35 | 2,55 | 5,2 | 11 |
| Пиковый крутящий момент | Нм | 0,79 | 1,37 | 2,2 | 3,7 | 2,3 | 7,5 | 8,2 | 17 |
| Скорость вращения (без нагрузки) | об/мин | 5600 | 3200 | 3100 | 1860 | 2700 | 1500 | 1200 | 620 |
| Диаметр статора, D | мм | 50 | 50 | 70 | 70 | 85 | 85 | 115 | 115 |
| Длина статора, L | мм | 17 | 23 | 23 | 31 | 27 | 39 | 39 | 68,5 |
| Масса | кг | 0,9 | 0,145 | 0,24 | 0,35 | 0,35 | 0,53 | 1,23 | 2,2 |
| Номинальный ток | А | 4,8 | 5 | 7 | 7 | 11 | 11 | 20 | 20 |
| Постоянная момента | Нм/А | 0,06 | 0,105 | 0,11 | 0,185 | 0,129 | 0,240 | 0,25 | 0,52 |
| Число пар полюсов | шт | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Максимальная эффективность | КПД | 0,87 | 0,87 | 0,87 | 0,87 | 0,87 | 0,87 | 0,87 | 0,87 |
| Внутренний диаметр ротора, d | мм | 30 | 30 | 42 | 42 | 52 | 52 | 64 | 64 |
| Длина ротора, | | мм | 16,1 | 26 | 20,7 | 33,4 | 25,4 | 34,2 | 31,1 | 60,2 |
npo-at.com
Что такое бесколлекторный двигатель?

Типы моторов?
Двигатели в мультироторных аппаратах бывают двух типов: коллекторные и бесколлекторные. Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.

Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.

В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший вращательный момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели при помощи водоотталкивающей смазки.
- Наименьшие радиопомехи
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.

Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
dronomania.ru
Создание и тестирование бесколлекторного мотора / Habr
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским. Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
habr.com
принцип работы, управление бесколлекторными электродвигателями. Бесколлекторный электродвигатель своими руками
Применяются бесколлекторные электродвигатели в медицинской технике, авиамоделировании, трубозапорных приводах нефтепроводов, а также во многих других отраслях. Но у них имеются свои недостатки, особенности, а также преимущества, которые порой играют ключевое значение при проектировании различных устройств. Как бы то ни было, такие электродвигатели занимают относительно малую нишу, если сравнивать их с асинхронными машинами переменного тока.
Особенности электромоторов
Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.

Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.
Другими словами, при помощи драйвера получается регулировать момент вращения, который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить скорость вращения ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют частоту генерируемых импульсов в интервале 7…8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
fb.ru
Бесколлекторный мотор GoolRC типоразмера 3660 для настольной сверлилки
Нестандартное использование бесколлекторного мотора, в любительских целях.Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
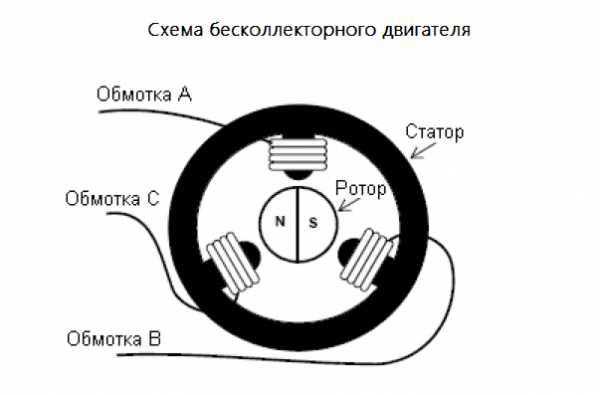
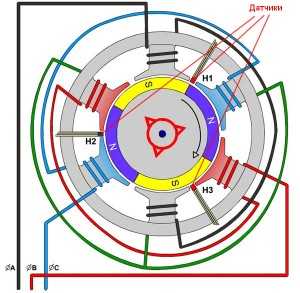
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.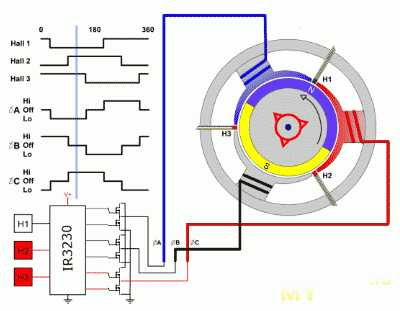
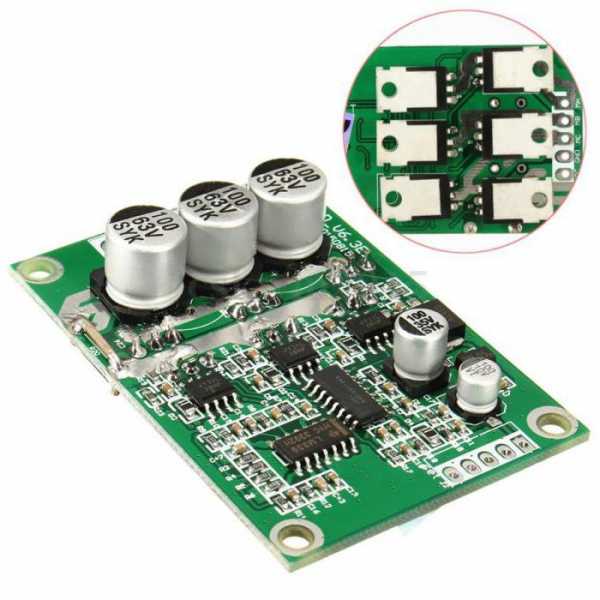
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
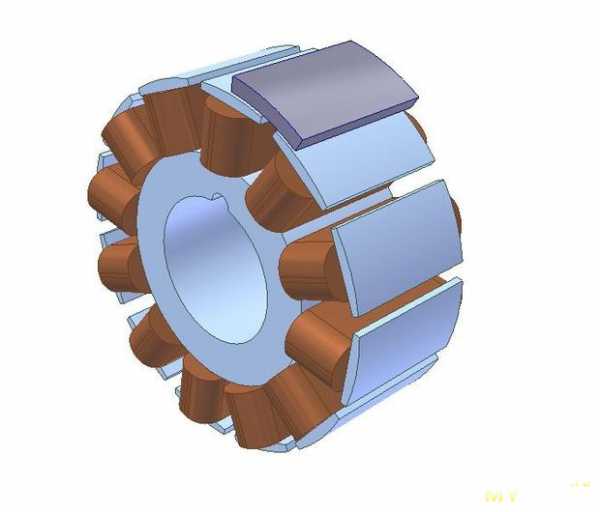
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Соединены катушки примерно вот так

Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото

Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером

Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов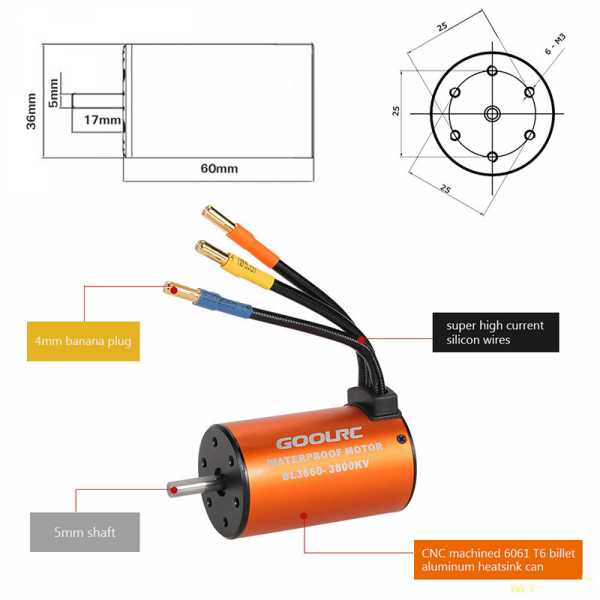
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе
С заднего торца видно подшипник
Заявлена защита от брызг и влаги
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм

Габариты корпуса двигателя 36х60 мм

Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением. 
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки
Пробуем закрепить крестообразный рычаг для фотографии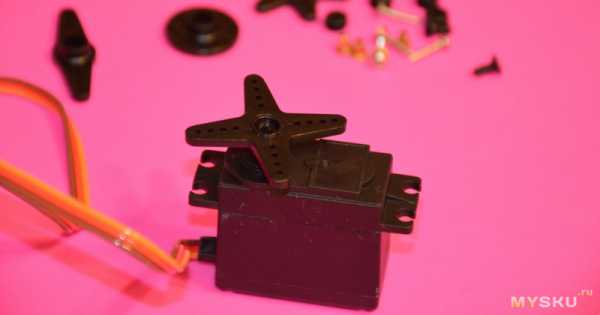
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические. 
Фото платы управления сервой
Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока. 
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660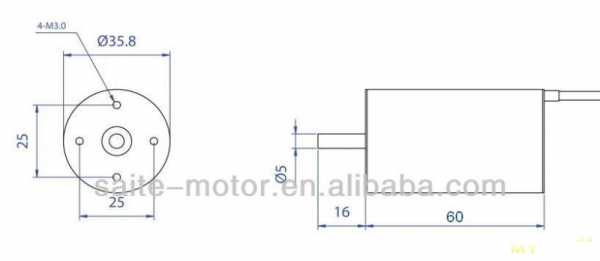
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)
Скрин из программы для печати на принтере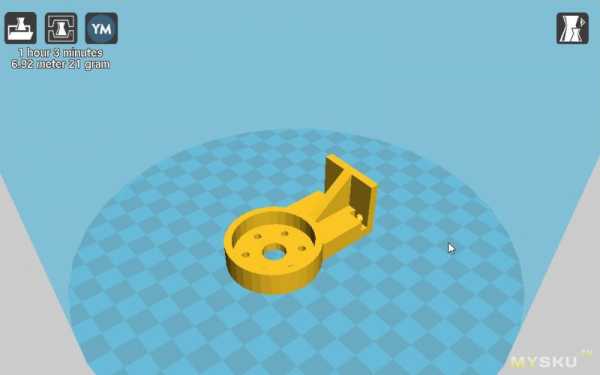
Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11 

Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
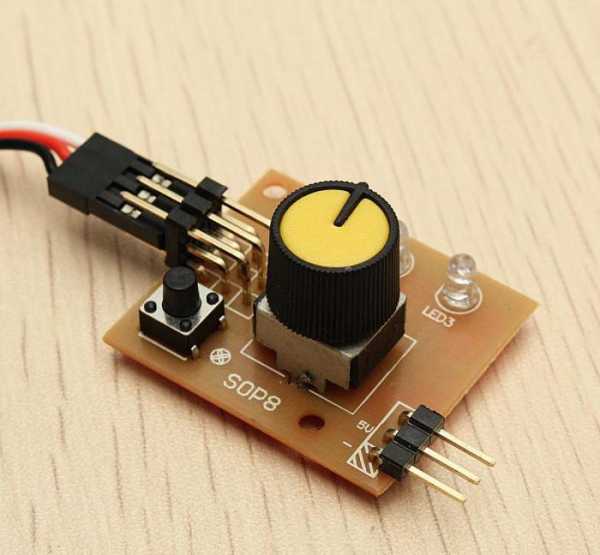
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
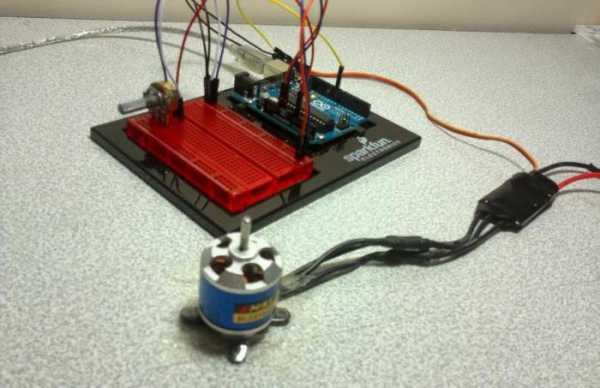
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.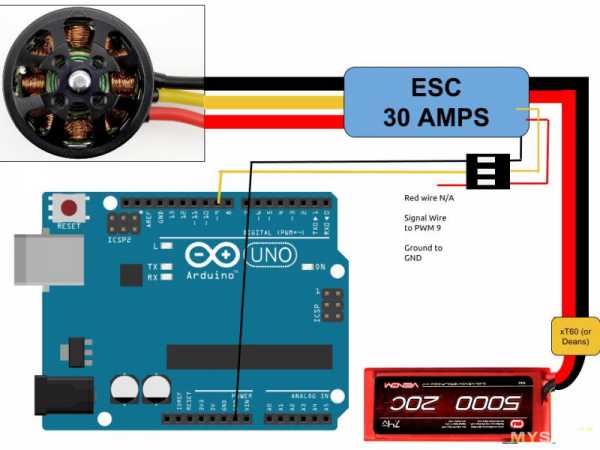
Соединяем все, по цветам.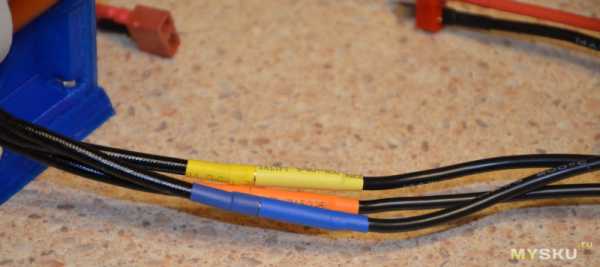
Источник показывает, что холостой ток контроллера небольшой (0.26А)
Теперь сверлильный станок.
Собираем все и крепим на стойку

Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат


Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
mysku.ru
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
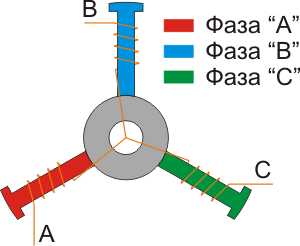
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
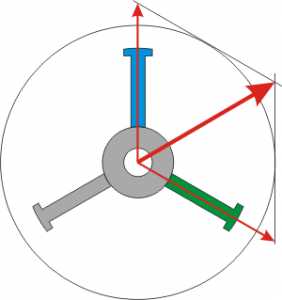
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
| Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
dal.academic.ru
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.


Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.

Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:

В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Обмотка трехфазного бесколлекторного двигателя выполняется медным проводом. Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
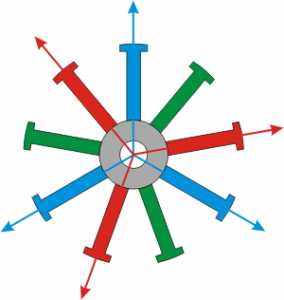
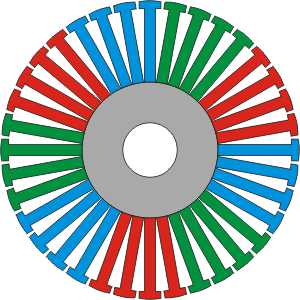
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.

В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов

Вариант обмотки на 12 зубов

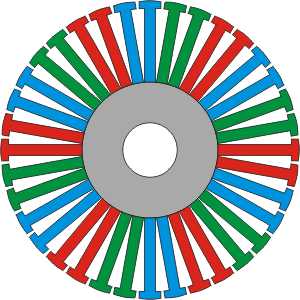
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба

4 группы по 3 зуба
3 группы по 4 зуба

2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 – это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
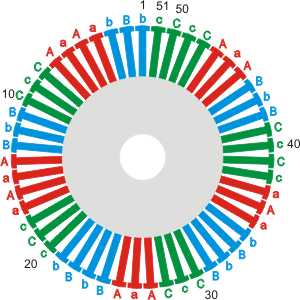
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
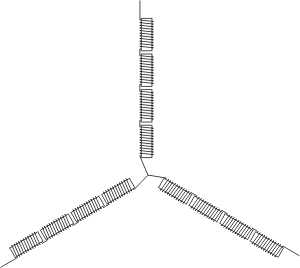
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный оборот. При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот. Например, имеем 42 магнита на роторе. Для того чтобы провернуть ротор на один оборот, потребуется 42/2=21 электрический оборот. Это свойство можно использовать как своеобразный редуктор. Подобрав необходимое количество полюсов, можно получить двигатель с желаемыми скоростными характеристиками. Кроме того, понимание этого процесса будет нам необходимо в будущем, при выборе параметров регулятора.
Датчики положения
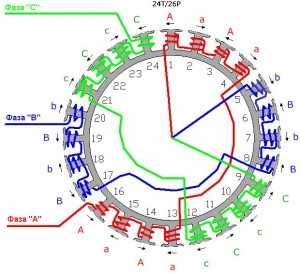
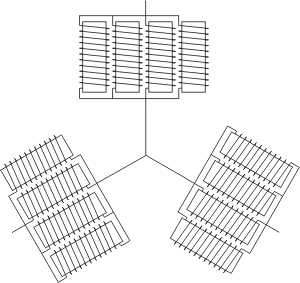
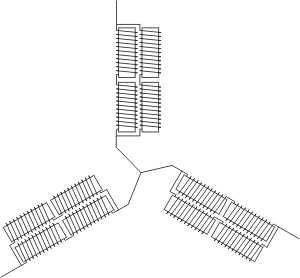
Устройство двигателей без датчиков отличается от двигателей с датчиками только отсутствием последних. Других принципиальных отличий нет. Наиболее распространены датчики положения, работающие на основе эффекта Холла. Датчики реагируют на магнитное поле, их располагают, как правило, на статоре таким образом, чтобы на них воздействовали магниты ротора. Угол между датчиками должен быть 120 градусов.
Имеется в виду “электрических” градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
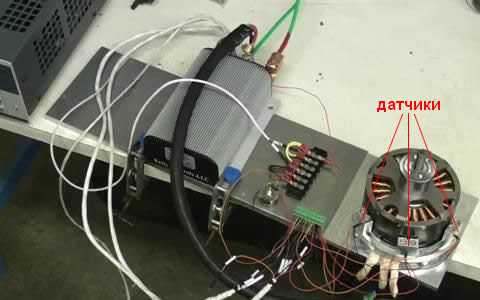
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Каждый двигатель рассчитывается под определенные требования и имеет следующие основные характеристики:
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный – подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
- Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv – количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно – несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Так же следует обратить внимание на то, что при номинальной нагрузке Вы не получите максимальных оборотов на валу двигателя. Kv указывается для не загруженного двигателя. При питании двигателя от батарей следует учесть “проседание” питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Звезда и Треугольник
Обмотки бесколлекторного двигателя соединяют по схеме звезда или треугольник (дельта).
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Литература
Design and Prototyping Methods for Brushless Motors and Motor Control
by Shane W. Colton
Вентильные электрические двигатели и приводы на их основе
Овчинников И.Е.
Статьи по бесколлекторным моторам:
www.avislab.com
