Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг).
Номинальные значения шагового двигателя указываются именно для этого режима.Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигнало
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.

Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.

Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.

Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.

Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.

Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.

Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.

Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный

Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401

Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.

Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.

Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.

Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем

Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое
-
полушаговое
-
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.
Двигатель с полым валом

Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой

Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом

В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Двигатель с винтом вместо вала

Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом

Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором

Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером

Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.

- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Шаговые двигатели. Принцип работы и управление
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
Шаговый двигатель принцип работы
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.
Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360° ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360°/ 100 шагов = 3,6°за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9°на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360°/ (50 × 4)).
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45°. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60°друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6°на шаг. Чтобы повернуть двигатель на угол, скажем, 216°, а затем снова остановиться в требуемом положении, потребуется всего: 216°/ (3,6°/ шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Смотрите также: Правила рациональных покупок: как не тратить лишних денег в супермаркете
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Конструкция шаговых двигателей устроена таким образом, что на статоре устройства расположено определенное количество обмоток управления, на которые последовательно подаётся напряжение. Такой подход в работе шаговых электродвигателей позволяет обеспечить дискретное изменение электрического поля внутри шагового электродвигателя и задать нужный угол перемещения оси ротора.
Разновидности приспособления
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5°. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.
На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5°.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
- Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Другие типы устройств
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1°, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей.
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
принцип работы, конструкция и управление
В данной статье мы рассмотрим шаговый двигатель постоянного тока, подробно разберем принцип работы, конструкцию и управление, а так же разберем один из чипов управления.
Описание и принцип работы
Как и двигатель постоянного тока, описанный в предыдущей статье, шаговые двигатели также являются электромеханическими исполнительными механизмами, которые преобразуют импульсный цифровой входной сигнал в дискретный (инкрементальный) механический ход, широко используются в промышленных системах управления. Шаговый двигатель представляет собой тип синхронного бесщеточного двигателя, в котором он не имеет ротора с коммутатором и угольных щеток, но имеет ротор, состоящий из многих (некоторые типы имеют сотни) постоянных магнитных зубьев и статор с отдельными обмотками.

Как следует из названия, шаговый двигатель не вращается непрерывно, как обычный двигатель постоянного тока, а движется дискретными «шагами» или «приращениями», причем угол каждого вращательного движения или шага зависит от числа полюсов статора и ротора. зубья имеет шаговый мотор.
Из-за их дискретной шаговой операции шаговые двигатели могут легко вращаться за конечную долю оборота за раз, например, 1,8, 3,6, 7,5 градусов и т.д. Так, например, давайте предположим, что шаговый двигатель совершает один полный оборот 360 o ровно за 100 шагов.
Тогда угол шага для двигателя задается как 360 градусов / 100 шагов = 3,6 градуса за шаг. Это значение обычно известно как Шаг угла.
Существует три основных типа шагового двигателя: переменное сопротивление, постоянный магнит и гибрид (своего рода комбинация обоих). Шаговый двигатель особенно хорошо подходит для устройств, требующих точного позиционирования и повторяемость с быстрой реакцией на запуск, остановка, реверс и регулировка скорости и другой ключевой особенностью шагового двигателя является его способность удерживать заряд ровно после достижения требуемого положения.
Как правило, шаговые двигатели имеют внутренний ротор с большим количеством «зубьев» постоянного магнита с рядом электромагнитных «зубьев», установленных на статоре. Электромагниты статоров поляризованы и деполяризованы последовательно, заставляя ротор вращаться по одному «шагу» за раз.
Современные многополюсные, многозубые шаговые двигатели имеют погрешность менее 0,9 градуса на шаг (400 импульсов на оборот) и в основном используются для высокоточных систем позиционирования, подобных тем, которые используются для магнитных головок в дисководе гибких дисков / жестких дисках, принтеры / плоттеры или роботизированные устройства. Наиболее часто используемым шаговым двигателем является шаговый двигатель с шагом 200 на оборот. Он имеет 50 зубчатый ротор, 4-фазный статор и угол шага 1,8 градуса (360 градусов / (50 × 4)).
Конструкция и управление шаговым двигателем

В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45 градусов. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60 градусов друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6 градуса на шаг. Чтобы повернуть двигатель на угол, скажем, 216 градусов, а затем снова остановиться в требуемом положении, потребуется всего: 216 градусов / (3,6 градуса / шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Чип управления шаговым двигателем SAA1027

В этом уроке о вращательных приводах, мы рассмотрели шаговый двигатель в качестве электромеханического привода, который может быть использован в качестве устройства вывода для позиционной или скорости управления.
В следующем уроке об устройствах ввода / вывода мы продолжим наш взгляд на устройства вывода, называемые исполнительными механизмами, и в частности те, которые снова преобразуют электрический сигнал в звуковые волны с помощью электромагнетизма.
Шаговые электродвигатели легко решают проблему точного позиционирования, не затратив больших средств. Моторы чаще применяются в роботах, станках с программным управлением. Рассмотрим устройство и действие двигателей.
Устройство
Шаговые электродвигатели являются двигателями переводящими электричество в механическое движение. Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название.
Шаг является частью оборота вала мотора. Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания. В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,20 шаговый мотор вращает вал на 2,20 при каждом поданном импульсе. Эта характеристика дает повод называть их цифровыми.
Метод действия
Обмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение.
Режимы управления
При разной подаче тока на катушки вал двигателя вращается по-разному.
Волновое управление
Метод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага.
Управление полным шагом
Широко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно. От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу.
Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению.
Режим полушага
Это оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки.
Режим с 1 обмоткой Режим с 2 обмотками
По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот.
Микрошаговый режим
Смысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения.
Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока.
Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках.
Способ микрошага — подключение питания двигателя, не управления катушками.
Отсюда следует, что микрошаг применяется при волновом типе.
В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход.
Типы моторов
Шаговые электродвигатели с постоянным магнитом
Ротор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения.
Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов.
Шаговые электродвигатели с сопротивлением переменной величины
Ротор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу.
Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках.
Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора.
Шаг равен интервалу от 5 до 15 градусов.
Шаговый мотор гибридного типа
Шаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность.
Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками.
Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс.
Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной. На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях. Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй.
Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии.
Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами.
Схема подключения обмоток
Шаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз. Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов. Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером.
Биполярный двигатель
Это самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно.
Параллельное или последовательное подключение
Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее.
Униполярный двигатель
Применяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу.
Подключение с общим проводом
Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения. Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора. Для этой цели необходимо провод отключить.
Униполярные шаговые электродвигатели имеют несколько вариантов подключения.
Общий провод соединен внутри
Шаговый мотор с 8-ю выводами
Это мотор с гибким подключением, обмотки оснащены выводами с обеих сторон. Можно подключать двигатель по любому методу:
- Униполярный с 5 или 6 выводами.
- Биполярный с последовательной схемой.
- С параллельной схемой.
- С малым током.
Подключение 4 обмоток
Шаговые электродвигатели Лавета
Моторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет. По его имени назвали тип шаговых двигателей.
Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу. Токи индукции образуют необходимый момент вращения.
Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита. Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд. Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов.
Похожие темы:
Как работает шаговый двигатель
В этой статье вы узнаете, как работает шаговый двигатель. Мы рассмотрим основные принципы работы шаговых двигателей, их режимы движения и типы шаговых двигателей по конструкции. Вы можете посмотреть следующее видео или прочитать написанную статью.
Принцип работы
Шаговый двигатель представляет собой бесщеточный двигатель постоянного тока, который вращается ступенчато. Это очень полезно, потому что его можно точно позиционировать без какого-либо датчика обратной связи, который представляет собой контроллер с разомкнутым контуром.Шаговый двигатель состоит из ротора, который обычно является постоянным магнитом, и он окружен обмотками статора. Когда мы постепенно активируем обмотки в определенном порядке и пропускаем через них ток, они намагничивают статор и создают электромагнитные полюса, соответственно, которые приводят двигатель в движение. Так что это основной принцип работы шаговых двигателей.

Режимы движения
Существует несколько различных способов управления шаговым двигателем.Первый — это волновой привод или возбуждение с одной катушкой. В этом режиме мы активируем только одну катушку за раз, что означает, что для этого примера двигателя с 4 катушками ротор совершит полный цикл за 4 шага.

Далее идет режим полного шага привода, который обеспечивает намного более высокий выходной крутящий момент, потому что у нас всегда есть 2 активных катушки в данный момент времени. Однако это не улучшает разрешение шагового двигателя, и ротор снова совершает полный цикл за 4 шага.

Для увеличения разрешения степпера мы используем режим полушагового привода.Этот режим фактически является комбинацией двух предыдущих режимов.
Здесь у нас есть одна активная катушка, за которой следуют 2 активные катушки, а затем снова одна активная катушка, за которой следуют 2 активные катушки и так далее. Таким образом, в этом режиме мы получаем удвоенное разрешение при той же конструкции. Теперь ротор совершит полный цикл за 8 шагов.
 Однако в настоящее время наиболее распространенным методом управления шаговыми двигателями является микрошаг. В этом режиме мы подаем переменный управляемый ток на катушки в виде синусоидальной волны.Это обеспечит плавное движение ротора, уменьшит напряжение деталей и повысит точность шагового двигателя.
Однако в настоящее время наиболее распространенным методом управления шаговыми двигателями является микрошаг. В этом режиме мы подаем переменный управляемый ток на катушки в виде синусоидальной волны.Это обеспечит плавное движение ротора, уменьшит напряжение деталей и повысит точность шагового двигателя.

Другим способом увеличения разрешения шагового двигателя является увеличение числа полюсов ротора и числа полюсов статора.

Типы шаговых двигателей по конструкции
По конструкции существуют 3 различных типа шаговых двигателей: шаговый двигатель с постоянным магнитом, шаговый двигатель с переменным сопротивлением и гибридный синхронный шаговый двигатель.

Степпер с постоянным магнитом имеет ротор с постоянным магнитом, который приводится в действие обмотками статора. Они создают противоположные полюса полярности по сравнению с полюсами ротора, который движет ротор.

В следующем типе шагового двигателя с переменным сопротивлением используется немагнитный ротор из мягкого железа. Ротор имеет зубья, которые смещены относительно статора, и когда мы активируем обмотки в определенном порядке, ротор перемещается соответственно, так что он имеет минимальный зазор между статором и зубьями ротора. это комбинации двух предыдущих степперов.Имеет зубчатый ротор с постоянными магнитами, а также зубчатый статор. Ротор имеет две секции, противоположные по полярности, и их зубья смещены, как показано здесь.

Это вид спереди широко используемого гибридного шагового двигателя, который имеет 8 полюсов на статоре, которые активируются 2 обмотками A и B. Поэтому, если мы активируем обмотку A, мы намагничиваем 4 полюса, из которых два из них будут иметь южную полярность, а два — северную.

Мы видим, что таким образом зубья роторов выровнены с зубьями полюсов A и выровнены с зубьями полюсов B.Это означает, что на следующем шаге, когда мы выключим полюса A и активируем полюса B, ротор будет двигаться против часовой стрелки, а его зубцы будут совмещены с зубцами полюсов B.

Если мы будем продолжать активировать полюса в определенном порядке, ротор будет двигаться непрерывно. Здесь мы также можем использовать различные режимы движения, такие как волновой привод, полный шаг, полушаг и микро шаг, чтобы еще больше увеличить разрешение шагового двигателя.
 .
.Что такое шаговый двигатель и как он работает
От простого DVD-плеера или принтера в вашем доме до сложнейшего станка с ЧПУ или роботизированного манипулятора шаговые двигатели можно найти практически везде. Благодаря своей способности совершать точные движения с электронным управлением эти двигатели находят применение во многих сферах, таких как камеры наблюдения, жесткий диск, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое. В этой статье мы узнаем, что делает эти моторы особенными, и теорию, стоящую за ними.Мы узнаем, как использовать один для вашего приложения.
Введение в шаговые двигатели
Как и все двигатели, шаговые двигатели также имеют статор и ротор , но в отличие от обычного двигателя постоянного тока, статор состоит из отдельных наборов катушек. Количество катушек будет отличаться в зависимости от типа шагового двигателя , но пока просто поймите, что в шаговом двигателе ротор состоит из металлических полюсов, и каждый полюс будет притягиваться набором катушек в статоре.На приведенной ниже схеме показан шаговый двигатель с 8 полюсами статора и 6 полюсами ротора.
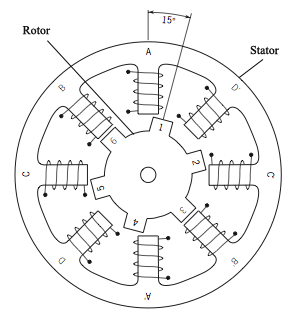
Если вы посмотрите на катушки на статоре, они расположены в виде пар катушек, подобно тому, как A и A ‘образуют пару B, а B’ образуют пару и так далее. Таким образом, каждая из этой пары катушек образует электромагнит, и они могут быть запитаны индивидуально с помощью схемы драйвера. Когда на катушку подается напряжение, она действует как магнит, и полюс ротора выравнивается по отношению к ней, а когда ротор вращается, чтобы приспособиться к статору, он называется одним шагом .Точно так же путем последовательного включения катушек мы можем вращать двигатель небольшими шагами, чтобы совершить полный оборот.
Типы шаговых двигателей
Существуют в основном три типа шаговых двигателей в зависимости от конструкции:
- Шаговый двигатель с переменным сопротивлением: Они имеют ротор с железным сердечником, который притягивается к полюсам статора и обеспечивает движение при минимальном сопротивлении между статором и ротором.
- Шаговый двигатель с постоянными магнитами: Они имеют ротор с постоянными магнитами и отталкиваются или притягиваются к статору в соответствии с приложенными импульсами.
- Гибридный синхронный шаговый двигатель: Они представляют собой комбинацию переменного реактивного сопротивления и шагового двигателя с постоянными магнитами.
Помимо этого, мы также можем классифицировать шаговые двигатели как Униполярные и Биполярные в зависимости от типа обмотки статора.
- Биполярный шаговый двигатель: Катушки статора на этом типе двигателя не будут иметь общего провода. Управление этим типом шагового двигателя отличается и является сложным, и также невозможно легко разработать схему управления без микроконтроллера.
- Униполярный шаговый двигатель: В этом типе шагового двигателя мы можем взять центральное ответвление обеих фазных обмоток для общего заземления или для общей мощности, как показано ниже. Это облегчает управление двигателями, в униполярном шаговом двигателе также много типов
Режимы работы в шаговом двигателе
Поскольку статор ступенчатой моды состоит из разных пар катушек, каждая пара катушек может возбуждаться разными способами, что позволяет модам работать во многих разных режимах.Ниже приведены широкие классификации
Full Step Mode
В режиме полного шага возбуждения мы можем добиться полного вращения на 360 ° с минимальным количеством оборотов (шагов). Но это приводит к меньшей инерции, а также вращение не будет плавным. Есть еще две классификации в режиме полного пошагового возбуждения: , однофазное пошаговое включение и два фазовых режима, .
1. Один пошаговый пошаговый или волновой пошаговый: В этом режиме только одна клемма (фаза) двигателя будет включена в любой момент времени.Это имеет меньшее количество шагов и, следовательно, может обеспечить полный поворот на 360 °. Поскольку число шагов меньше, ток, потребляемый этим методом, также очень низок. В следующей таблице приведена последовательность шаговых волн для 4-фазного шагового двигателя
| Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2.Двухэтапное пошаговое включение: Как следует из названия в этом методе, две фазы будут одной. Он имеет то же количество шагов, что и волновой шаг, но поскольку две катушки находятся под напряжением одновременно, он может обеспечить лучший крутящий момент и скорость по сравнению с предыдущим методом. Хотя одним из недостатков является то, что этот метод также потребляет больше энергии.
| Step | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 1 | 0 | 0 |
2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
полушаговый режим
Режим полушагового режима представляет собой комбинацию однофазного и двухфазного режимов.Эта комбинация поможет нам преодолеть вышеупомянутый недостаток обоих режимов.
Как вы уже догадались, так как мы объединяем оба метода, нам нужно выполнить 8-шаговых в этом методе, чтобы получить полный оборот. Последовательность переключения для 4-фазного шагового двигателя показана ниже
Шаг | Фаза 1 | Фаза 2 | Фаза 3 | Фаза 4 |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 1 |
6 | 0 | 0 | 0 | 1 |
7 | 1 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 0 |
Micro Step Mode
Микрошаговый режим является комплексным из всех, но он предлагает очень хорошую точность наряду с хорошим крутящим моментом и плавной работой.В этом методе катушка будет возбуждена двумя синусоидальными волнами, которые находятся на расстоянии 90 °. Таким образом, мы можем контролировать как направление, так и амплитуду тока, протекающего через катушку, что помогает нам увеличить количество шагов, которые двигатель должен сделать за один полный оборот. Микропереступление может занять до 256 шагов, чтобы сделать один полный оборот, что делает двигатель вращаться быстрее и плавнее.
Как использовать шаговый двигатель
Достаточно скучной теории, давайте предположим, что кто-то дает вам шаговый двигатель, например, знаменитый 28-BYJ48, и вам действительно интересно, как он работает.К этому времени вы бы поняли, что невозможно заставить эти двигатели вращаться, просто запитав их от источника питания, так как бы вы это сделали?
Давайте посмотрим на этот 28-BYJ48 шаговый двигатель .
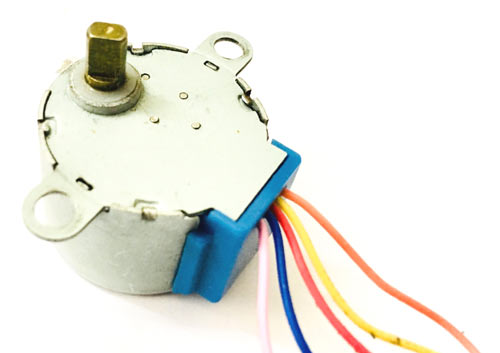
Итак, в отличие от обычного двигателя постоянного тока, у него пять проводов всех причудливых цветов, и почему это так? Чтобы понять это, мы должны сначала узнать, как работает степпер, о котором мы уже говорили. Прежде всего, шаговые двигатели не вращают , они ступенчатые, поэтому их также называют шаговыми двигателями .Это означает, что они будут двигаться только один шаг за раз. Эти двигатели имеют последовательность катушек, присутствующих в них, и эти катушки должны быть включены определенным образом, чтобы двигатель вращался. Когда каждая катушка находится под напряжением, двигатель делает шаг, и последовательность активирования заставит двигатель делать непрерывные шаги, заставляя его вращаться. Давайте посмотрим на катушки внутри двигателя, чтобы точно знать, откуда эти провода.
Как вы можете видеть, двигатель имеет однополюсных 5-выводных катушек .Есть четыре катушки, которые должны быть включены в определенной последовательности. На красные провода подается напряжение +5 В, а остальные четыре провода будут заземлены для запуска соответствующей катушки. Мы используем любой микроконтроллер для подачи питания на эти катушки в определенной последовательности и заставить двигатель выполнять необходимое количество шагов. Опять же, есть много последовательностей, которые вы можете использовать, обычно используется , 4-ступенчатый , а для более точного управления также можно использовать , 8-ступенчатый, . Таблица последовательности для 4-ступенчатого управления показана ниже.
Шаг | Катушка под напряжением |
Шаг 1 | А и В |
Шаг 2 | B и C |
Шаг 3 | C и D |
Шаг 4 | D и A |
Итак, почему этот двигатель называется 28-BYJ48 ? Шутки в сторону!!! Я не знаю.Для этого мотора нет никаких технических оснований называться так; может быть, мы не должны углубляться в это. Давайте посмотрим на некоторые важные технические данные, полученные из таблицы данных этого двигателя на рисунке ниже.
Это голова, полная информации, но нам нужно взглянуть на несколько важных, чтобы знать, какой тип степпера мы используем, чтобы мы могли эффективно его программировать. Сначала мы знаем, что это шаговый двигатель 5В, так как мы подаем на красный провод напряжение 5В.Кроме того, мы также знаем, что это четырехфазный шаговый двигатель, поскольку в нем было четыре катушки. Теперь передаточное число составляет 1:64. Это означает, что вал, который вы видите снаружи, совершит один полный оборот, только если двигатель внутри будет вращаться 64 раза. Это происходит из-за зубчатых колес, которые соединены между двигателем и выходным валом, эти зубчатые колеса помогают увеличить крутящий момент.
Другие важные данные, на которые следует обратить внимание, это угол шага : 5,625 ° / 64. Это означает, что двигатель при работе в 8-ступенчатой последовательности будет двигаться 5.625 градусов для каждого шага, и для выполнения одного полного поворота потребуется 64 шага (5,625 * 64 = 360).
Расчет шагов за оборот для шагового двигателя
Важно знать, как рассчитать число шагов на оборот для вашего шагового двигателя, потому что только тогда вы сможете эффективно его программировать / управлять.
Предположим, что мы будем работать с двигателем в 4-х ступенчатой последовательности, поэтому угол шага будет 11,25 °, так как он равен 5,625 ° (приведено в таблице) для 8-ступенчатой последовательности, это будет 11.25 ° (5,625 * 2 = 11,25).
шагов на оборот = 360 / угол шага Здесь 360 / 11,25 = 32 шага за оборот.
Зачем нам нужны модули драйверов для шаговых двигателей?
Большинство шаговых двигателей будут работать только с помощью модуля привода. Это связано с тем, что модуль контроллера (микроконтроллер / цифровая схема) не сможет обеспечить достаточный ток от своих выводов ввода / вывода для работы двигателя. Поэтому мы будем использовать внешний модуль, такой как ULN2003, модуль , в качестве драйвера шагового двигателя .Существует много типов модулей драйвера, и номинальная мощность одного из них будет изменяться в зависимости от типа используемого двигателя. Основным принципом для всех модулей привода будет источник / приемник достаточного тока для работы двигателя. Кроме того, существуют также модули драйверов, в которых заранее запрограммирована логика, но мы не будем обсуждать это здесь.
Если вам интересно узнать, как вращать шаговый двигатель с помощью микроконтроллера и ИС драйвера, то мы рассмотрели много статей о его работе с различными микроконтроллерами:
Теперь я считаю, что у вас достаточно информации для управления любым шаговым двигателем, который вам необходим для вашего проекта.Давайте посмотрим на преимущества и недостатки шаговых двигателей.
Преимущества шаговых двигателей
Одним из основных преимуществ шагового двигателя является то, что он имеет превосходный контроль положения и, следовательно, может использоваться для точного управления. Кроме того, он обладает очень хорошим удерживающим моментом, что делает его идеальным выбором для робототехники. Считается, что шаговые двигатели имеют более длительный срок службы, чем обычный двигатель постоянного тока или серводвигатель.
Недостатки шаговых двигателей
Как и все двигатели, шаговые двигатели также имеют свои недостатки, так как они вращаются, делая маленькие шаги, и не могут достичь высоких скоростей.Кроме того, он потребляет энергию для удержания крутящего момента, даже когда он идеален, что увеличивает потребление энергии.
,Типы, эксплуатация и применение
Шаговый двигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. Кроме того, это бесщеточный синхронный электродвигатель, который может разделить полный оборот на большое количество шагов. Положение двигателя можно точно контролировать без какого-либо механизма обратной связи, при условии, что двигатель тщательно подобран для применения. Шаговые двигатели аналогичны переключаемым реактивным двигателям.
Шаговый двигатель использует теорию работы магнитов, чтобы заставить вал двигателя поворачиваться на точное расстояние при подаче импульса электричества.Статор имеет восемь полюсов, а ротор — шесть полюсов. Ротор потребует 24 импульса электричества, чтобы переместить 24 шага на один полный оборот. Еще один способ сказать, что ротор будет двигаться точно на 15 ° для каждого импульса электричества, которое получает двигатель.
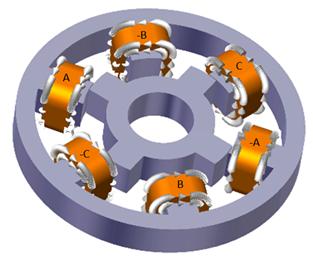 Шаговый двигатель
Шаговый двигательТипы шаговых двигателей:
Существует три основных типа шаговых двигателей:
- Шаговый двигатель с постоянным магнитом
- Гибридный синхронный шагер
- Шаговый двигатель с переменным сопротивлением
Шаговый двигатель с постоянным магнитом : Двигатели с постоянными магнитами используют постоянный магнит (РМ) в роторе и воздействуют на притяжение или отталкивание между РМ ротора и электромагнитами статора.
Шаговый двигатель с переменным сопротивлением: Двигатели с переменным сопротивлением (VR) имеют гладкий железный ротор и работают по принципу, согласно которому минимальное сопротивление возникает при минимальном зазоре, поэтому точки ротора притягиваются к полюсам магнита статора.
гибридный синхронный шаговый двигатель: названы гибридные шаговые двигатели, потому что они используют комбинацию методов с постоянными магнитами (PM) и переменным сопротивлением (VR) для достижения максимальной мощности при небольшом размере корпуса.
Преимущества шагового двигателя:
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель имеет полный крутящий момент в состоянии покоя.
- Точное позиционирование и повторяемость движения, поскольку хорошие шаговые двигатели имеют точность 3-5% шага, и эта ошибка не накапливается от одного шага к следующему.
- Отличная реакция на запуск, остановку и разворот.
- Очень надежный, так как в двигателе нет контактных щеток.Поэтому срок службы двигателя просто зависит от срока службы подшипника.
- Реакция двигателя на цифровые входные импульсы обеспечивает управление в разомкнутом контуре, делая двигатель более простым и менее затратным в управлении.
- Возможно достичь очень медленного синхронного вращения с нагрузкой, которая напрямую связана с валом.
- Широкий диапазон скоростей вращения может быть реализован, поскольку скорость пропорциональна частоте входных импульсов.
Области применения:
- Промышленные машины — Шаговые двигатели используются в автомобильных измерительных приборах и станках автоматизированного производственного оборудования.
- Безопасность — новые продукты видеонаблюдения для индустрии безопасности.
- Medical — Шаговые двигатели используются в медицинских сканерах, пробоотборниках, а также в цифровой стоматологической фотографии, жидкостных насосах, респираторах и аппаратах для анализа крови.
- Бытовая электроника — шаговые двигатели в камерах для автоматической фокусировки и масштабирования цифровых камер.
А также есть бизнес-приложений машин, приложений компьютерной периферии.
Работа шагового двигателя:
Шаговые двигатели работают не так, как щеточные двигатели постоянного тока, которые вращаются при подаче напряжения на их клеммы. С другой стороны, шаговые двигатели эффективно имеют несколько зубчатых электромагнитов, расположенных вокруг центрального зубчатого куска железа. Электромагниты питаются от внешней цепи управления, например, микроконтроллера.
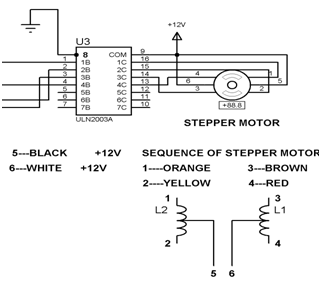 Контур шагового двигателя
Контур шагового двигателяДля вращения вала двигателя сначала подается один электромагнит, который обеспечивает магнитное притяжение зубьев шестерни к зубцам электромагнита.Точка, когда зубья шестерни, таким образом, выровнены с первым электромагнитом, они слегка смещены относительно следующего электромагнита. Таким образом, когда следующий электромагнит включается, а первый выключается, шестерня слегка вращается, чтобы совпасть со следующим, и оттуда процесс повторяется. Каждое из этих небольших вращений называется шагом, а целое число шагов совершает полный оборот. Таким образом, двигатель может быть повернут точным. Шаговый двигатель не вращается непрерывно, он вращается ступенчато.На статоре установлены 4 катушки с углом 90 o между собой. Соединения шагового двигателя определяются способом, которым соединены катушки. В шаговом двигателе катушки не связаны. Двигатель имеет шаг вращения 90 или , причем обмотки подаются в циклическом порядке, определяя направление вращения вала. Работа этого двигателя показана с помощью переключателя. Катушки активируются последовательно с интервалом в 1 секунду. Вал вращается на 90 o каждый раз, когда активируется следующая катушка.Его низкоскоростной крутящий момент будет напрямую зависеть от тока.
Управление шаговым двигателем путем изменения тактовых импульсов
Цепь управления шаговым двигателем представляет собой простую и недорогую схему, в основном используемую в приложениях с низким энергопотреблением. Схема показана на рисунке, который состоит из 555 таймеров IC в качестве стабильного мультивибратора. Частота рассчитывается с использованием приведенного ниже соотношения:
Частота = 1 / T = 1,45 / (RA + 2RB) C, где RA = RB = R2 = R3 = 4,7 кОм и C = C2 = 100 мкФ.
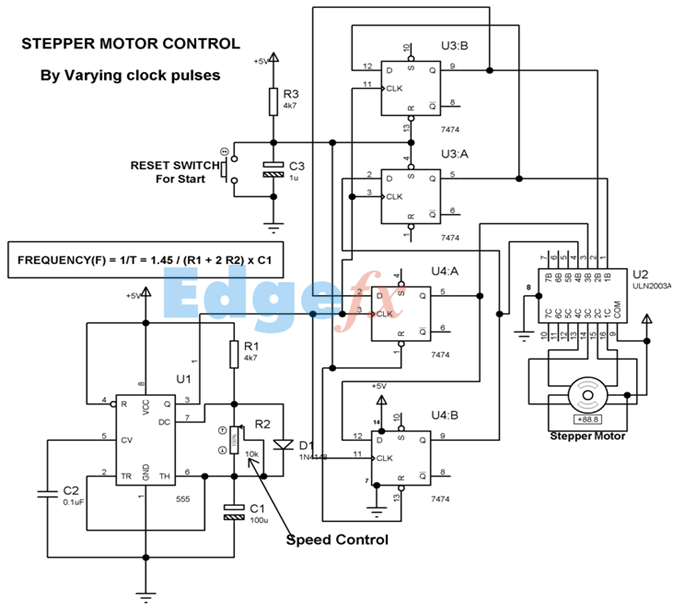 Управление шаговым двигателем путем изменения тактовых импульсов
Управление шаговым двигателем путем изменения тактовых импульсовВыход таймера используется в качестве часов для двух 7474 двойных триггеров «D» (U4 и U3), настроенных как счетчик колец.При первоначальном включении питания устанавливается только первый триггер (т. Е. Выход Q на выводе 5 U3 будет на логике «1»), а остальные три триггера сбрасываются (т. Е. На выходе Q — логика 0). При получении тактового импульса логический выход «1» первого триггера смещается ко второму триггеру (вывод 9 U3). Таким образом, логический выход 1 продолжает смещаться по кругу с каждым тактовым импульсом. Q-выходы всех четырех триггеров усиливаются транзисторами Дарлингтона в ULN2003 (U2) и соединяются с обмотками шагового двигателя оранжевого, коричневого, желтого, черного с 16, 15,14, 13 ULN2003 и красного с + мы поставляем.
Общая точка обмотки подключена к источнику питания + 12 В постоянного тока, который также подключен к контакту 9 ULN2003. Цветовой код, используемый для обмоток, может отличаться в зависимости от марки. Когда питание включено, управляющий сигнал, подключенный к выводу SET первого триггера и к контактам CLR других трех триггеров, становится активным «низким» (из-за схемы включения-сброса, образованной R1- Комбинация С1) для установки первого триггера и сброса оставшихся трех триггеров. При сбросе Q1 IC3 становится «высоким», в то время как все другие выходы Q становятся «низкими».Внешний сброс можно активировать, нажав переключатель сброса. Нажав кнопку сброса, вы можете остановить шаговый двигатель. Двигатель снова начинает вращаться в том же направлении, отпустив переключатель сброса.
Теперь у вас есть представление о типах супердвигателей и их применении, если у вас есть какие-либо вопросы по этой теме или по электрическим и электронным проектам оставляйте комментарии ниже.
Фото предоставлено:
.Как работает шаговый двигатель — Часть 1
Rh3T Magazine Vol. 2, Dec 2009
СТЕПНЫЕ МОТОРЫ РАБОТАЮТ ОТЛИЧНО ОТ НОРМАЛЬНЫХ АВТОМОБИЛЕЙ ПОСТОЯННОГО ТОКА, КОТОРЫЕ ВРАЩАЮТСЯ, КОГДА НАПРЯЖЕНИЕ ПРИМЕНЯЕТСЯ К ИХ ТЕРМИНАЛАМ.
Обзор
Шаговые двигателибыли разработаны в начале 1960-х годов как недорогая альтернатива позиционированию сервосистем в развивающейся компьютерной периферии. Основное преимущество шаговых двигателей состоит в том, что они могут обеспечить точное управление положением без необходимости обратной связи по положению.Другими словами, они могут работать по принципу «разомкнутого контура», что значительно снижает стоимость системы контроля положения. Шаговый двигатель преобразует электронные импульсы в пропорциональное механическое движение. Каждый оборот вала шагового двигателя состоит из серии отдельных шагов. Шаг определяется как угловое вращение, создаваемое выходным валом каждый раз, когда двигатель получает шаговый импульс. Каждый шаг заставляет вал вращаться на определенное количество градусов. Размер этого шага зависит от расположения зубьев двигателя, но общее значение равно 1.8 градусов или 200 шагов за оборот.
Stepper Motors против других двигателей
1. Безщеточный
— Шаговые двигатели безщеточные. Двигатели с контактными щетками создают искры, нежелательные в определенных условиях.
2. Удерживающий момент
— Шаговые двигатели имеют очень хорошую низкую скорость и удерживающий момент. Шаговые двигатели обычно рассчитываются с точки зрения их удерживающего момента и могут даже удерживать положение (в меньшей степени) без подачи энергии, используя магнитный «стопорный» момент.
3. Позиционирование без обратной связи
— шаговые двигатели могут работать по принципу «разомкнутого контура» без необходимости использования какого-либо датчика для определения положения вала. По сравнению с сервоприводами (замкнутые системы — системы, которые передают информацию о положении), шаговые двигатели очень просты в управлении. Положение вала гарантируется, пока крутящий момент двигателя достаточен для нагрузки при всех условиях его эксплуатации.
4. Независимая от нагрузки
— Скорость вращения степпера не зависит от нагрузки, при условии, что он имеет достаточный крутящий момент для преодоления проскальзывания.Чем выше число оборотов в минуту, приводимое в действие шаговым двигателем, тем больший крутящий момент ему необходим, поэтому все шаговые двигатели в конечном итоге начинают проскальзывать на некоторых оборотах. Скольжение обычно является бедствием для степперов, потому что положение вала становится неизвестным. По этой причине программное обеспечение обычно поддерживает шаговую скорость в пределах максимальной максимальной скорости. В приложениях, где требуется известное число оборотов в минуту при различной нагрузке, степперы могут быть очень удобными.
Типичный двухфазный однополярный шаговый двигатель
Характеристики шагового двигателя
Шаговые двигатели являются устройствами постоянной мощности.По мере увеличения скорости двигателя крутящий момент уменьшается. Кривая крутящего момента может быть расширена за счет использования ограничителей тока и увеличения напряжения возбуждения.
Степперы обладают большей вибрацией, чем двигатели других типов, так как дискретный шаг имеет тенденцию перебрасывать ротор из одного положения в другое. Эта вибрация может стать очень плохой на некоторых скоростях и может привести к потере крутящего момента двигателя. Эффект может быть смягчен путем быстрого ускорения в диапазоне проблемных скоростей, физического демпфирования системы или использования микропереходного драйвера.Двигатели с большим числом фаз также работают более плавно, чем двигатели с меньшим количеством фаз.
Характеристики и характеристики шагового двигателя
Фирменные табличкишаговых двигателей обычно дают только ток обмотки и иногда напряжение и сопротивление обмотки. Номинальное напряжение будет давать номинальный ток обмотки при постоянном токе: но это в основном бессмысленный рейтинг, поскольку все современные драйверы имеют ограничение тока, а напряжения привода значительно превышают номинальное напряжение двигателя.
Низкоскоростной крутящий момент степпера напрямую зависит от тока. То, как быстро крутящий момент падает на более высоких скоростях, зависит от индуктивности обмотки и схемы привода, к которой он подключен, особенно от напряжения возбуждения.
Степперы должны иметь размеры в соответствии с опубликованной кривой крутящего момента, которая указывается производителем при определенных напряжениях привода и / или с использованием их собственной схемы привода. Не гарантируется, что вы достигнете одинаковой производительности при разных схемах привода, поэтому эту пару следует выбирать с большой осторожностью.
Обычно основные характеристики можно найти на шильдике
Основы работы
Шаговые двигатели работают не так, как обычные двигатели постоянного тока, которые вращаются при подаче напряжения на их клеммы. С другой стороны, шаговые двигатели эффективно имеют множество «зубчатых» электромагнитов, расположенных вокруг центрального зубчатого куска железа. Электромагниты питаются от внешней цепи управления, такой как микроконтроллер.Для вращения вала двигателя сначала подается один электромагнит, который обеспечивает магнитное притяжение зубьев шестерни к зубцам электромагнита. Таким образом, когда зубья шестерни выровнены с первым электромагнитом, они слегка смещены относительно следующего электромагнита. Таким образом, когда следующий электромагнит включен и первый выключен, шестерня немного поворачивается, чтобы выровнять со следующим, и оттуда процесс повторяется. Каждое из этих небольших вращений называется «шагом» с целым (полным числом) количеством шагов, совершающих полный оборот.Таким образом, двигатель можно повернуть на точный угол.
Типы шаговых двигателей
Шаговые двигатели могут быть классифицированы по конструкции двигателя, топологии привода и схеме шага. Существует три основных типа конструкции шагового двигателя. Они различаются по конструкции в зависимости от использования постоянных магнитов и / или железных роторов со стальными многослойными статорами. К ним относятся:
- Степпер с постоянным магнитом
- синхронный шаговый гибрид Степлер с переменным сопротивлением
Шаговые двигатели с постоянными магнитами недороги и имеют большой шаговый угол 7.От 5 ° до 18 °. Шаговые двигатели с постоянными магнитами часто используются в недорогих потребительских товарах. Гибридные шаговые двигатели немного дороже и имеют угол наклона 1,8 или 0,9 °. Гибридные шаговые двигатели преобладают в промышленных системах управления движением. Двигатели с переменным сопротивлением обычно имеют три или пять фаз и требуют другой топологии привода. Шаговые двигатели с переменным сопротивлением не рассматриваются в этой эталонной конструкции. Наиболее распространенным типом конструкции шагового двигателя, используемой для промышленного управления движением, является гибридный двигатель с постоянным магнитом.
Двухфазные шаговые двигатели
шаговых двигателей также имеют разное количество фаз. В этой статье мы подробно обсудим только двухфазные шаговые двигатели, так как они наиболее часто используются. Для двухфазного шагового двигателя предусмотрены два основных способа намотки электромагнитных катушек: биполярный и униполярный.
Unipolar Motors
Однополярный шаговый двигатель имеет логически две обмотки на фазу, по одной для каждого направления магнитного поля.Поскольку в этой конфигурации магнитный полюс может быть изменен без переключения направления тока, схема коммутации может быть очень простой (например, один транзистор) для каждой обмотки. Как правило, при заданной фазе один конец каждой обмотки делается общим: три провода на фазу и шесть выводов для типичного двухфазного двигателя. Часто эти две фазы общего достояния соединены внутри, поэтому двигатель имеет только пять выводов.
Микроконтроллер или контроллер шагового двигателя могут использоваться для активации приводных транзисторов в правильном порядке, и эта простота эксплуатации делает однополярные двигатели популярными среди любителей; они, вероятно, самый дешевый способ получить точные угловые движения.
Катушки униполярного шагового двигателя
Для экспериментатора одним из способов отличить общий провод от провода с катушкой является измерение сопротивления. Сопротивление между общим проводом и проводом конца катушки всегда вдвое меньше, чем между проводом конца катушки и конца катушки. Это связано с тем, что фактически длина катушки в два раза больше длины между концами и только половина от центра (общий провод) до конца. Быстрый способ определить, работает ли шаговый двигатель, — это замкнуть каждые две пары и попытаться повернуть вал, когда чувствуется сопротивление, превышающее нормальное, это указывает на то, что цепь к определенной обмотке замкнута и что фаза работает ,
Однополярные шаговые двигатели с шестью или восемью проводами могут приводиться в действие с помощью биполярных драйверов, оставляя разъединенные общие фазы и приводя в движение две обмотки каждой фазы вместе. Также можно использовать двухполюсный драйвер для управления только одной обмоткой каждой фазы, оставляя половину обмоток неиспользованной.
Bipolar Motors
Биполярные двигатели имеют логически одну обмотку на фазу. Ток в обмотке должен быть обращен, чтобы повернуть магнитный полюс, поэтому схема возбуждения должна быть более сложной, как правило, с использованием H-моста.Есть два отведения на фазу, ни один не является общим.
Статические эффекты трения с использованием Н-моста наблюдались при определенных топологиях привода. Поскольку обмотки лучше используются, они более мощные, чем однополярный мотор того же веса.
Катушки биполярного шагового двигателя
Униполярный против Биполярный
Крутящий момент шагового двигателя пропорционален напряженности магнитного поля обмоток статора.Он может быть увеличен только путем добавления большего количества обмоток или увеличения тока. Естественным пределом против любого увеличения тока является опасность насыщения железного сердечника. Гораздо важнее максимальное повышение температуры двигателя из-за потери мощности в обмотках статора. Это показывает одно преимущество биполярной цепи, которая по сравнению с однополярными системами имеет только половину сопротивления меди из-за двойного поперечного сечения провода. Ток обмотки может быть увеличен на коэффициент √2, и это оказывает прямое пропорциональное влияние на крутящий момент.Таким образом, при своем пределе потерь мощности биполярные двигатели обеспечивают крутящий момент примерно на 40% больше (рис. 5), чем однополярные двигатели, установленные на одной раме. Если более высокий крутящий момент не требуется, можно уменьшить размер двигателя или потерю мощности. Сравнивая рисунки 3 и 4, вы заметите, что однополярным шаговым двигателем можно управлять с помощью биполярного метода, удалив соединение общих проводов.
Драйвер биполярного двигателя обеспечивает больший крутящий момент, чем однополярный двигатель.
трехфазный и более
На веб-сайте Cytron есть запрос, опубликованный студентом последнего семестра из Международного колледжа INTI, в котором спрашивается о способах различения двухфазных и четырехфазных шаговых двигателей. Я надеюсь, что вы очень хорошо знакомы с основными обмотками катушек в двухфазном шаговом двигателе, когда доберетесь сюда. На рисунке 6 показаны обмотки трехфазного шагового двигателя. Для трехфазного биполярного сигнала просто удалите соединение «com» на рисунке 6.Без дополнительных пояснений, различия между двухфазным и трехфазным шаговым двигателем видны отчетливо. Таким образом, добавление еще одной катушки к диаграмме на рисунке 6 дает четырехфазный шаговый двигатель в этом случае. До сих пор вы должны заметить, что наблюдение за количеством проводов не гарантирует правильного определения типа двигателя.
Трехфазные однополюсные катушки шагового двигателя
8-выводной шаговый двигатель
Шаговый электродвигатель с 8 выводами намотан как однополюсный шаговый двигатель, но выводы не соединены с общим внутри двигателя.Этот тип двигателя может быть подключен в нескольких конфигурациях:
- 2-фазный униполярный с последовательными обмотками и общими проводами.
- 2-фазный биполярный с последовательной обмоткой и игнорировать общие провода. Это дает более высокую индуктивность, но меньший ток на обмотку.
- 2-фазный биполярный с параллельными обмотками. Это требует более высокого тока, но может работать лучше, так как индуктивность обмотки уменьшается.
- 4-фазный биполярный с одной обмоткой на фазу. Этот метод будет запускать двигатель только на половине доступных обмоток, что уменьшит доступный низкоскоростной крутящий момент, но потребует меньшего тока.
8-выводных катушек шагового двигателя
Заключение
Шаговый двигатель может быть хорошим выбором, когда требуется контролируемое движение. Давайте закончим статью кратким изложением плюсов и минусов использования шаговых двигателей.
Плюсы
1. Угол поворота двигателя пропорционален входному импульсу.
2. Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением).
3. Точное позиционирование и повторяемость движения, поскольку хорошие шаговые двигатели имеют точность 3-5% шага, и эта ошибка не суммируется от одного шага к следующему.
4. Отличная реакция на запуск / остановку / разворот.
5. Очень надежный, так как в двигателе нет контактных щеток. Поэтому срок службы двигателя просто зависит от срока службы подшипника.
6. Реакция двигателя на цифровые входные импульсы обеспечивает управление по разомкнутому контуру, что делает двигатель более простым и менее затратным в управлении.
7. Возможно достичь очень низкой скорости синхронного вращения с нагрузкой, которая напрямую связана с валом.
8. Широкий диапазон скоростей вращения может быть реализован, так как скорость пропорциональна частоте входных импульсов.
Минусы
1. Необходим более сложный алгоритм вождения и схема привода двигателя.
2. Резонансы могут возникнуть, если не контролируются должным образом.
3. Не легко работать на очень высоких скоростях.
В следующей части этой статьи будут описаны методы управления шаговыми двигателями и конструкция оборудования. Пожалуйста, не переключайтесь!
Информация взята с:
SD02B Руководство пользователя
http://www.st.com
http://www.stepperworld.com
http://www.cs.uiowa.edu/~jones/step
http://www.solarbotics.net
,