Мощность электродвигателя | Полезные статьи
Наиболее распространенным типом промышленных силовых установок являются асинхронные электродвигатели. Один из наиболее важных их параметров — мощность электродвигателя, которая в зависимости от модели может варьироваться в широких пределах. От мощности зависит тип энергосистемы, к которой двигатель можно подключить, а также тип и производительность оборудования, с которым он будет сопряжен. По этой причине, не зная мощность электродвигателя, использовать его практически невозможно.
Определение мощности электромотора по размерам сердечка статора
Если технического паспорта нет, можно произвести расчет мощности электродвигателя, исходя из размеров сердечника статора и частоты вращения. Для этого используется формула P2H = C * D12 / N1 * 10-6кВт. Здесь:
С —постоянная мощность;
D — размер внутреннего диаметра сердечника статора в см;
l — длина статора в см;
N1 — значение синхронной частоты вращения в об/мин.
Постоянная мощность зависит от частоты вращения и габаритов мотора. Она определяется по величине полюсного деления как зависимость мощности от количества полюсов и размеров полюсного деления τ, если U1 < 500В.
| Число полюсов | Полюсное деление, см | |||||
| 10 | 20 | 30 | 40 | 50 | 60 | |
| 2 | 0,4 | 1,4 | 2,2 | 2,7 | 3,15 | 3,9 |
| 4 | 1,1 | 2,2 | 3,0 | 3,5 | 3,8 | 4,2 |
| 6 | 1,7 | 2,9 | 3,8 | 4,35 | 4,8 | — |
τ = πD1 / 2р см.
2р здесь — количество полюсов в моторе.
Полученный по этой формуле результат необходимо округлить до наиболее подходящего значения в таблице. Это самый простой и доступный метод, по которому может быть осуществлен расчет мощности электродвигателя.
Подбор требуемой мощности электродвигателя
Правильно подобранная мощность электродвигателя позволяет получить оптимальные технико-экономические показатели электропривода по себестоимости, размерам, экономичности и прочим параметрам. При стабильной нагрузке на электродвигатель определить его мощность можно просто выбором по каталогу, исходя из соотношения Рн ≥ Рнагр. Здесь Рн — это мощность подбираемого двигателя, а Рнагр — предполагаемая мощность нагрузки.
Потребляемая мощность электромотора
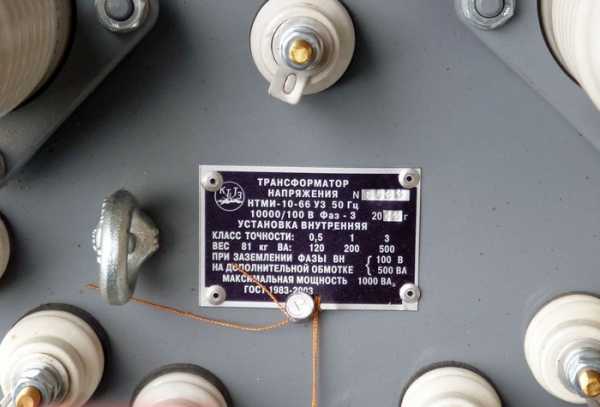
Рисунок 1. Шильдик с параметрами на корпусе электродвигателя Работая с электромоторами, нужно знать, как по шильдику определяется потребляемая мощность электродвигателя. Значение мощности Р — это не электрическая мощность мотора, а механическая мощность на валу, обозначенная в кВт.
Чтобы найти потребляемую мощность, нужно обратить внимание на КПД и cosφ двигателя, указанные на шильдике. Причем КПД может быть обозначен как просто буквами КПД, так и буквой η, что и видно на шильдике. Сначала необходимо найти активную мощность, потребляемую двигателем от сети, по формуле Ра = Р / КПД.
Т. е. в нашем случае (рис. 1) потребляемая электродвигателем из сети активная мощность равна Ра = 0,75кВт/0,75 = 1 кВт. Теперь, чтобы найти полную потребляемую мощность, нужно воспользоваться формулой S = Pa/cosφ = 1/0,78 = 1,28 кВт.
Коэффициент мощности электромотора
Коэффициент мощности электродвигателя, или cos φ — это соотношение активной и полной мощности двигателя. Определяется коэффициент мощности электродвигателя по формуле cosφ = P/S. Здесь:
Р — активная мощность в Вт;
S — полная мощность в ВА.
В большинстве случаев активная мощность имеет меньшее значение, чем полная, из-за чего коэффициент составляет меньше единицы. Только тогда, когда нагрузка будет исключительно активной, cosφ станет равен единице.
Чем ниже коэффициент мощности потребителя, тем более мощными должны быть трансформаторы, электрические станции, а также питающие линии электропередач. Кроме того, моторы с низким коэффициентом имеют меньший КПД и большие энергопотери.
cable.ru
формула, правила расчета, виды и классификация электродвигателей
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.

Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
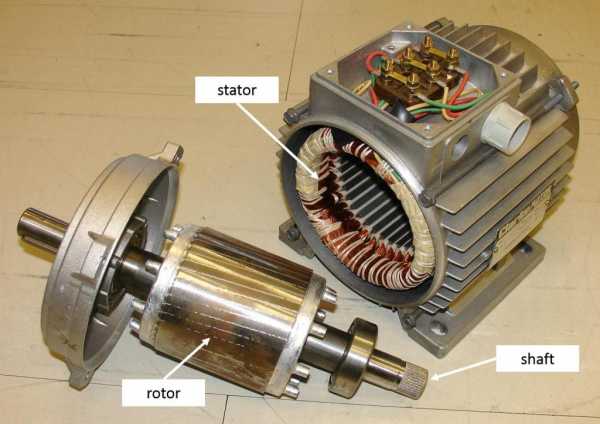
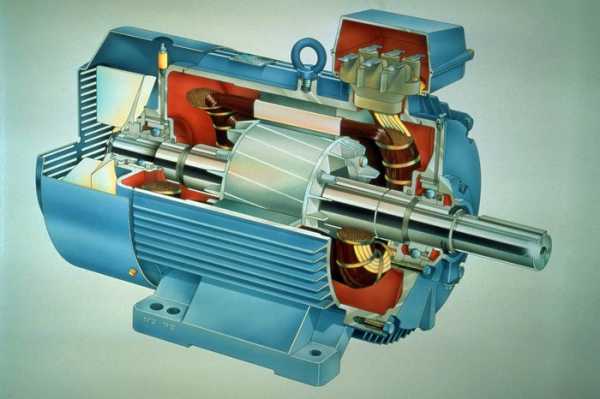
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.

Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
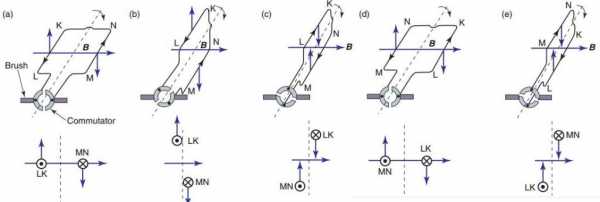
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
fb.ru
Мощность и вращающий момент электродвигателя. Что это такое?
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.

А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.

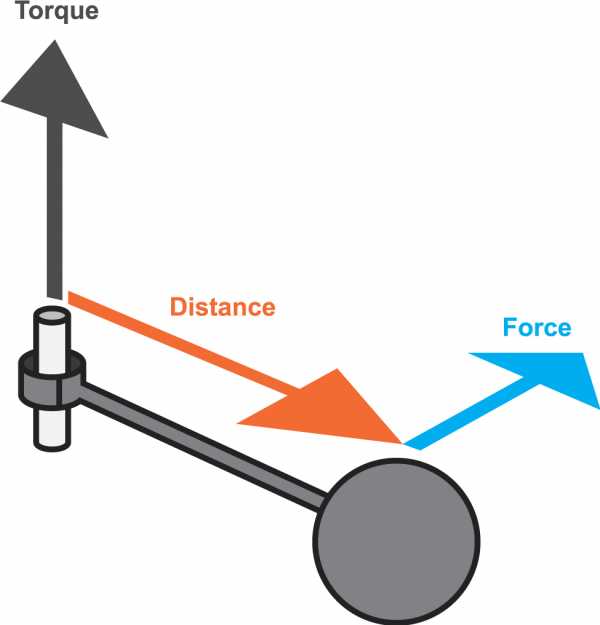
Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.

Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
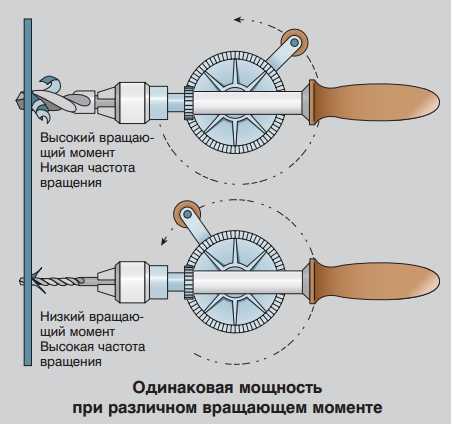
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
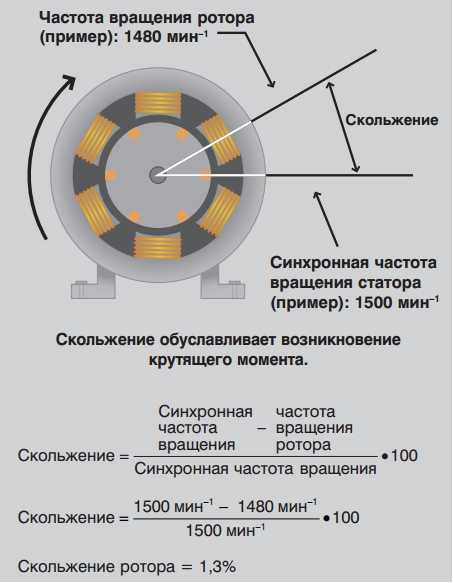
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
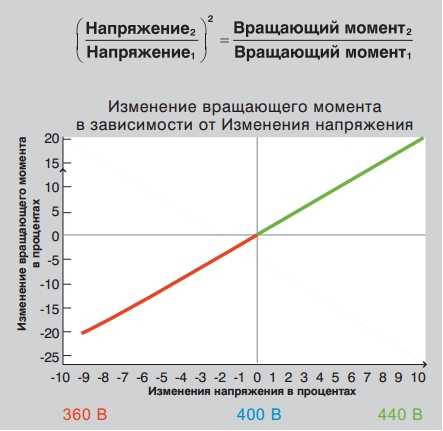
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.

В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.

Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
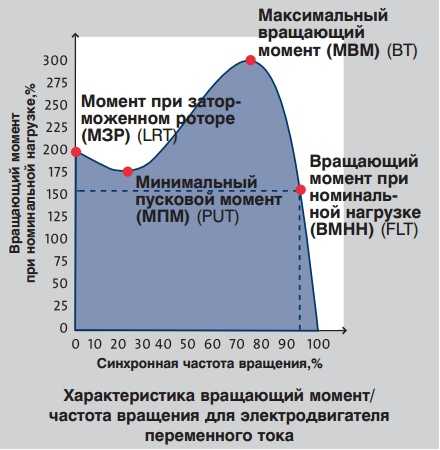
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.

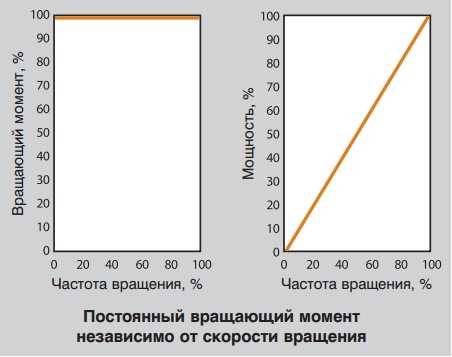
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
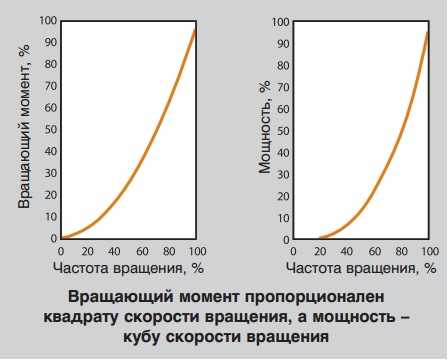
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.

На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
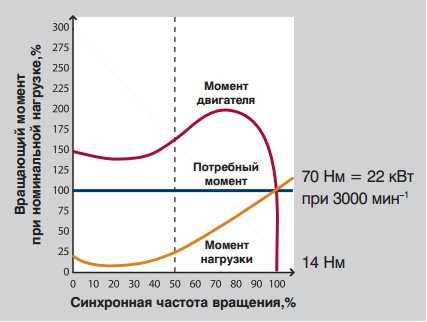
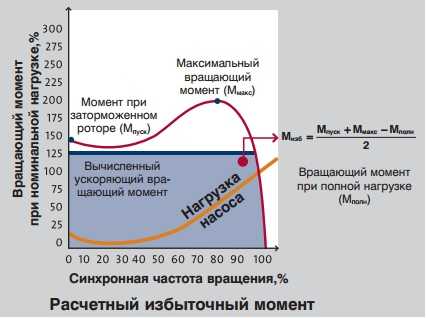
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
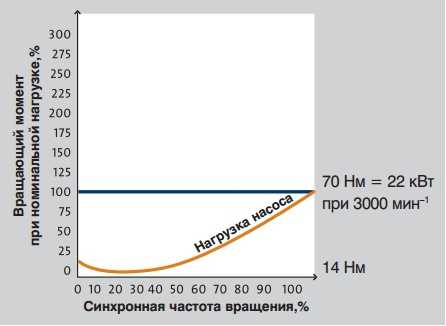
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
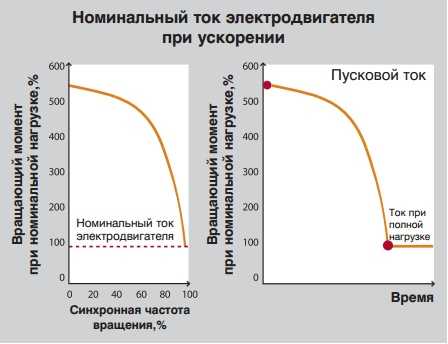
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
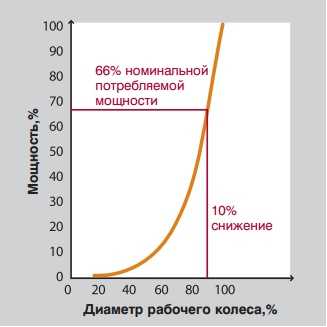
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.

Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.

Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
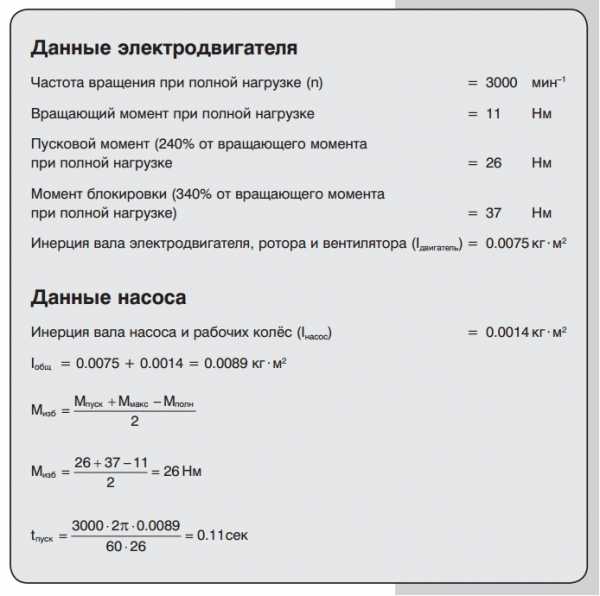
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.

P1 (кВт) Входная электрическая мощность насосов — это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя — это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
www.eti.su
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
Задать свой вопрос
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
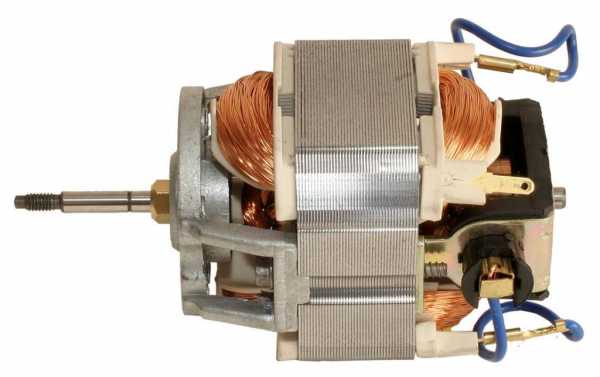
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
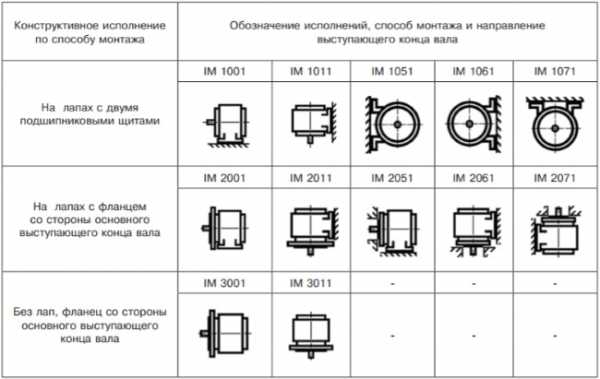
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
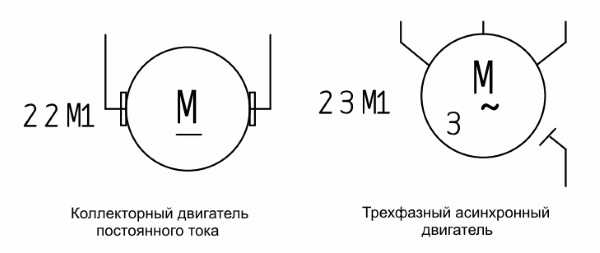
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
tehprivod.su
Ориентировочная мощность электродвигателя по размерам. Как определить основные параметры электродвигателя?
Электрический двигатель — это электромеханический преобразователь, в каковом электричество превращается в энергию механики, конечным эффектом чего и есть выделение теплоты. Электродвижок необходим для работы всех электромашин. Чтобы выбрать такой двигатель нужно учитывать все параметры прибора и его характеристику, так как эти показатели необходимы, для определения назначения двигателя и нагрузки на него через сеть. Это полностью обуславливает долговечность и качество дела электромашины.
Содержание
Составляющие электромашины
Основой для электрической машины является правило электроиндукции с магнитной индукцией. Такой прибор включает в себя статор или как его называют константной частью (характерно для асинхронных, синхронных машин изменяющегося тока) или индуктора (для приборов константного тока) и ротора, его называют активной или движущейся частью (для асинхронных и синхронных машин изменяющегося тока) или якоря (приборов константного тока). В роли константной части для машин тока с малой мощью активно применяются магниты (неизменного состояния).
Мощность электродвигателя
Электрическая мощность – это физическая величина, которая характеризуется скоростью преобразования ну или передачи электрической энергии. Чтобы облегчить понимание движение тока электрики представляют, как передвижение жидкости по трубе, а напряжение – с разницей положения ярусов этой жидкости. Электричество, так же, осуществляя работу, передвигается от высокой возможности к низкой, как и жидкость. Значит мощь электрики это количество работы, некая совершается за 1 секунду, или быстрота выполнения самой работы. Сумма тока электрики, которая прокладывается сквозь поперечный разрез цепи на протяжении одной секунды, это и есть сила тока в самой цепи.
Отсюда вытекает, что мощность электрическая равна в пропорции напряжению и силе тока в цепи. Для определения мощи тока принята единица – ватт, сокращенно — Вт.
Для физических подсчетов принято было применять стандартную формулу N=A/t, где N – мощность, A – работа, t – время.
Существует много вариантов данной формулы с разными буквенными обозначениями.
Определить мощность двигателя
Если вы постоянно используете электромашины, то часто натыкались на шильдики в которых, по сути, указанно все характеристики, в том числе и варианты мощности. Если посмотреть изображение шильдика, то среди разных параметров можно увидеть и значение мощности. Как видно, против надписи максимальная мощность стоит значение 1000 Вт. Но это не его электрическая мощность, как часто думает потребитель.
На изображённом ниже шильдике показана максимально допустимая мощность электротока. Часто пишут на шильдике рекомендуемую мощность и обозначают её киловаттами.
Итак, как же возможно рассчитать используемую мощность определенного двигателя из собственной электрической сети. Для этого нужно смотреть и на другие показатели на том же шильдике исследуемого прибора — это КПД и cosφ. Где КПД, бывает обозначают аббревиатурой КПД, или буквой η. Сначала нужно учитывать связь полезной мощности механики на валу и КПД. Имея данные значения можно легко рассчитать мощность потребляемую двигателем из электрической сети. Узнаем по соотношению: Ра=Р/η. Но это еще не результаты. Нужно помнить, электроприборы потребляют из сети как активную, так и реактивную энергию. При расчётах используемой движком полной мощи, необходимо получить соотношение из треугольника мощностей.
Как определить мощность электродвигателя
Итак, перейдем к вариантам действий. А именно, для определения мощности электродвигателя:
- по току. Подключаем двигатель к сети электротока с определенной нагрузкой (напряжением). Поочередно подключая в нашу последовательность в каждую обвивку амперметр, измеряем работающий электрический ток движка в амперах. Определяем количество полученных как результат замеров токов. Сумму умножаем на показатель напряжения, и как последствие — употребляемая мощь электрического движка в ваттах;
- по размерам. Определяем эндоментрический калибр сердечника неподвижной части, его длину совместно с каналами вентиляции в сантиметрах. Узнаем повторность изменяющегося тока в сети, к которой подключен определенный электродвигатель и одновременную частоту оборота вала. Что бы определить неизменную разделения, воспроизводим калибр сердечника на одновременную повторность вала и умножаем на 3,14 и в том же порядке делим на 120 (3,14 D n/(120 f)) и повторяемость сети. Таким образом, узнали разделение прибора, характеризуемое как полярное. Находим сколько полюсов, умножая часто встречаемую повторность электричества сети на 60, и делим полученное количество на повторность оборота вала. Снятые значения умножаем на два. На основе решения смотрим в табличке «определения зависимости неизменной движка С от количества полюсов» находим наше число константной. Умножаем полученную неизменную на калибр сердечника в квадрате, его одновременную частоту оборота и длину. Полученное число умножаем на 10^(-6) (P = C D² l n 10^(-6)). Одержали значение электрической мощи в киловаттах;
- мощности, которую выдает электродвигатель. Находим скорость оборота вала исследуемого прибора тахометром во вращениях за секунду. После берем динамометр и определяем тяговое усилие электродвигателя. И как результат для определения мощности в ваттах умножаем частоту оборотов на 6,28, также на силу и радиус вала, последние измеряем линейкой.
Обратите внимание! Для каждого двигателя предназначена сеть на определенное количество фаз. Примером выступает трехфазный двигатель, который предназначен только для питания от трёхфазной сети переменного тока.
Определить мощность электродвигателя, у которого отсутствует или не читается шильдик, можно путем электрических измерений, или используя таблицы габаритов электромоторов. Как правило, это значение требуется для правильного подбора конденсаторов, при включении трехфазного электродвигателя в однофазную сеть. Определяя мощность электромотора по габаритам, придется также определить частоту вращения вала.
Измерение тока
В отличие от нагревателя или лампы накаливания, ток, потребляемый электродвигателем, зависит от нагрузки. Измерение тока холостого хода, не даст достоверной информации о его мощности. В случае, когда дви
les74.ru
Определение мощности двигателя по диаметру вала и Габаритные размеры АИР и 4АМ
Здесь вы найдете максимально полные технические данные о габаритах и установочных размерах асинхронных электродвигателей АИР. Монтажные исполнения, габариты, крепежные размеры по лапам, диаметры валов и фланца, ширина шпонки и шпоночного паза. Сводные таблицы габаритно-присоединительных размеров асинхронных двигателей АИР 63-355 габарита и 4АМ 100-355 мм. Данные присоединительные размеры позволят без труда заказать соединительную муфту при комплектации двигателя с другим оборудованием (насосом, вентилятором, редуктором).Обозначения основных монтажных и присоединительных размеров двигателей
Условные обозначения габаритных размеров:- h — высота вращения вала или габарит электродвигателя. Высота от центра оси вала до земли. Важный присоединительный размер при сборе агрегата и центровке
- l30*h41*d24 — длина, высота, ширина электродвигателя АИР, размеры по габаритам. Необходимы для калькуляции цены доставки и необходимого места при транспортировке
- m — вес электродвигателя, масса. Нужен для расчета транспортных издержек и сопромата
- d1 — диаметр вала. Габаритно-присоединительный размер АИР, необходимый при агрегатировании с другим оборудованием или подбора полумуфты
- d20 — ширина, крепежный диаметр фланца.
- d22 — диаметр отверстий фланца. Габаритный размер для изготовления или подбора ответного фланца
- l10 и b10 – расстояние между крепежными отверстиями на лапах электродвигателя. Важный габаритно-установочный размер, необходимый при монтаже электродвигателя к станине или на платформу
- L1 – длина вала
- b1 – ширина шпонки. Размер необходим для изготовления полумуфты
Монтажное исполнение – фланец, лапы, комбинированное
Присоединительный и габаритный чертеж монтажного исполнения электродвигателя АИР на лапах (IM 1081), лапы-фланец (IM 2081), чистый фланец (IM 3081).Чертеж монтажного исполнения IM1081 на лапах
Чертеж монтажного исполнения IM2081, IM3081 (лапы-фланец)
Таблица диаметров валов электродвигателей
Как определить мощность электродвигателя по диаметру вала? С помощью таблицы с диаметрами валов, шириной шпонки электродвигателей стандарта «Интерэлектро» — АИР, 4АМ, 4А, 5АМ. Данные характеристики полезны при подборе двигателя, подготовке к монтажу, проточке муфты. При наличии маркировки, определение мощности, скорости вращения и прочих характеристик не составит сложности.| Диаметр вала, d1 | Ширина шпонки, b1 | 3000 об | 1500 об | 1000 об | 750 об |
| 14 | 5 | 0,37/3000 | 0,25/1500; 0,37/1500 | 0,18/1000; 0,25/1000 | — |
| 19 | 6 | 0,75/3000; 1,1/3000 | 0,55/1500; 0,75/1500 | 0,37/1000; 0,55/1000 | — |
| 22 | 6 | 1,5/3000; 2,2/3000 | 1,1/1500; 1,5/1500 | 0,75/1000; 1,1/1000 | — |
| 24 | 8 | 3/3000 | 2,2/1500 | 1,5/1000 | — |
| 28 | 8 | 4/3000; 5,5/3000 | 3/1500; 4/1500 | 2,2/1000 | — |
| 32 | 10 | 7,5/3000 | 5,5/1500 | 3/1000 | 2,2/750; 3/750 |
| 38 | 10 | 18,5/3000 | 7,5/1500; 11/1500 | 5,5/1000; 7,5/1000 | 4/750; 5,5/750 |
| 42 | 12 | 15/3000; 18,5/3000 | — | — | — |
| 48 | 14 | — | 15/1500; 18,5/1500 | 11/1000; 15/1000 | 7,5/750; 11/750 |
| 55 | 16 | 37/3000; 45/3000; 55/3000 | 22/1500; 30/1500 | 18,5/1000 | 15/750 |
| 60 | 18 | — | 37/1500; 45/1500 | 22/1000; 30/1000 | 18,5/750; 22/750 |
| 65 | 18 | 75/3000; 90/3000 | 55/1500 | 55/1000 | 30/750 |
| 70 | 20 | 110/3000; 132/3000 | — | — | — |
| 75 | 20 | 160/3000; 200/3000 | 75/1500; 90/1500 | 45/1000; 55/1000 | 37/750; 45/750 |
| 80 | 22 | — | 110/1500; 132/1500 | 75/1000; 90/1000 | 55/750; 75/750 |
| 85 | 22 | 250/3000; 315/3000 | — | — | — |
| 90 | 25 | — | 160/1500; 200/1500 | 110/100; 132/1000 | 90/750; 110/750 |
| 100 | 28 | — | 250/1500; 315/1500 | 160/1000; 200/1000 | 132/750; 160/750 |
Габаритные размеры общепромышленных электродвигателей
Таблицы размеров и веса двигателей АИР
Таблица габаритов и вес асинхронных электродвигателей АИР63
Все установочные размеры асинхронных электродвигателей АИР 63-го габарита: АИР 63A2, АИР63A4, АИР63B2, АИР63B4.| Двигатель | Параметры | l30*h41*d24, мм | H, мм | D1, мм | L1, мм | Крепеж по лапам | Крепеж по фланцу | Вес, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР63A2 | 0,37/3000 | 239х163х161 | 63 | 14 | 30 | 80 | 100 | 130 | 10 | 5,2 |
| АИР63A4 | 0,25/1500 | |||||||||
| АИР63B2 | 0,55/3000 | |||||||||
| АИР63B4 | 0,37/1500 | |||||||||
Таблица габаритных параметров асинхронных моторов 71
Крепежные и присоединительные размеры электродвигателей АИР71А2, АИР 71А4, АИР 71А6, АИР71В2, АИР 71В4, АИР 71В6.| Электродвигатель | Параметры | l30*h41*d24, мм | H, мм | D1, мм | L1, мм | Крепеж по лапам | Крепеж по фланцу | M, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР71А2 | 0,75/3000 | 275х190х201 | 71 | 19 | 40 | 90 | 112 | 165 | 12 | 8,7 |
| АИР71А4 | 0,55/1500 | |||||||||
| АИР71А6 | 0,37/1000 | |||||||||
| АИР71В2 | 1,1/3000 | |||||||||
| АИР71В4 | 0,75/1500 | |||||||||
| АИР71В6 | 0,55/1000 | |||||||||
Габаритно-присоединительные характеристики электромоторов 80 габарита
Присоединительные и монтажные размеры асинхронных электродвигателей АИР 80А2, АИР 80А4, АИР80А6, АИР 80B2, АИР80B4, АИР80B6.| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Крепеж по лапам | Крепеж по фланцу | Вес, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР80А2 | 1,5/3000 | 301х208х201 | 80 | 22 | 50 | 100 | 125 | 165 | 11 | 13,3 |
| АИР80А4 | 1,1/1500 | |||||||||
| АИР80А6 | 0,75/1000 | |||||||||
| АИР80В2 | 2,2/3000 | 322х210х201 | 15 | |||||||
| АИР80В4 | 1,5/1500 | |||||||||
| АИР80В6 | 1,1/1000 | |||||||||
Габаритные и установочные параметры электродвигателей с высотой вала 90 мм
Размеры, длина, ширина, высота и диаметр вала и вес электродвигателя АИР90L2, АИР90L4, АИР 90L6. Присоединительные| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Крепеж по лапам | Крепеж по фланцу | M, кг | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР90L2 | 3/3000 | 351х218х251 | 90 | 24 | 50 | 125 | 140 | 215 | 14 | 30 |
| АИР90L4 | 2,2/1500 | |||||||||
| АИР90L6 | 1,5/1000 | |||||||||
Таблица присоединительных габаритов двигателей АИР100. Установочные
Каталог асинхронных электродвигателей АИР 100S2, АИР 100S4, АИР100L2, АИР 100L4, АИР100L6 с крепежными и установочными размерами и весом.Каталог асинхронных двигателей АИР112. Диаметр 32мм
Справочник электродвигателей АИР112M2, АИР 112M4, АИР112M6, АИР 112M6, АИР112M8 с габаритными, установочными и присоединительными размерами.Характеристики моторов и установочные крепежи с высотой вала 132
Технический каталог асинхронных электродвигателей АИР 132S4, АИР132S6, АИР132S8, АИР132M2, АИР132M4, АИР132M6, АИР132M8. Размеры, вес и диаметр вала.Таблица крепежных и установочных типоразмеров электромоторов с высотой вала 160 мм
Габаритные, установочные и присоединительные размеры электродвигателей с высотой вала 160: АИР160S2, АИР160S4, АИР160S6, АИР160S8, АИР160M2, АИР160M4, АИР160M6, АИР160M8.Габаритно-установочные и вес двигателей 180 мм
Присоединительные и установочные размеры общепромышленных электродвигателей АИР в 180 габарите: АИР180S2, АИР180S4, АИР180M2, АИР180M4, АИР180M6, АИР180M8.Крепежные характеристики, присоединительные размеры моторов АИР200. Вал, диаметр.
Таблица установочных размеров общепромышленных электродвигателей 200 габарита: АИР200L2, АИР200L4, АИР200L6, АИР200L8, АИР200M2, АИР200M4, АИР200M6, АИР200M8.Привязка мощности и оборотов к установочным и присоединительным размерам АИР225
Каталог электродвигателей АИР 225S2, АИР225S4, АИР225S6, АИР225S8, АИР 225M2, АИР225M4, АИР225M6, АИР225M8 с габаритными, крепежными размерами и диаметром.| Маркировка | Параметры | l30*h41*d24 | H | D1 | L1 | Межосевые по лапам | Межосевые по фланцу | Вес, т | ||
| L10 | B10 | D20 | D22 | |||||||
| АИР225М2 | 55/3000 | 836х536х551 | 225 | 55 | 110 | 311 | 356 | 500 | 19 | 0,32 |
| АИР225М4 | 55/1500 | 65 | 140 | 0,325 | ||||||
| АИР225М6 | 37/1000 | |||||||||
| АИР225М8 | 30/750 | |||||||||
Таблица посадочных и присоединительных параметров двигателей с 250 высотой вала
Габаритно-установочные размеры асинхронных электродвигателей АИР 250 габарита: АИР250S2, АИР250S4, АИР250S6, АИР250S8, АИР250M2, АИР250M4, АИР250M6, АИР250M8. Крепежи, диаметр.Габариты, присоединительные и крепежи двигателей АИР 280. Диаметр вала
Установочные, присоединительные размеры электродвигателей АИР 280 габарита: АИР280S2, АИР280S4, АИР280S6, АИР280S8, АИР 280M2, АИР280M4, АИР280M6, АИР280M8.Установочные параметры, крепежи и вес моторов 315 мм
Присоединительные и установочные размеры электродвигателя АИР 315S2, АИР315S4, АИР315S6, АИР315S8, АИР 315S10, АИР315М2, АИР315М4, АИР 315М6, АИР315М8, АИР315М10.Присоединительные характеристики электромоторов с высотой оси 355 мм
Крепежные и установочные размеры электродвигателей АИР355S2, АИР355S4, АИР355S6, АИР355S8, АИР355S10, АИР355М2, АИР355М4, АИР 355М6, АИР355М8, АИР355М10.После подбора и изучения диаметров валов и других габаритных размеров, звоните специалистам «СЛЭМЗ». Вам помогут купить двигатель АИР или подобрать аналог по выбранным габаритам!
slemz.com.ua
В чем измеряется мощность электрического двигателя
КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЧЕСКОГО ПРИВОДА
Последовательность кинематического расчета
Мощность на приводном валу ,кВт
где F t – окружное усилие, кН;V – скорость,м/с .
Частота вращения приводного вала ,мин -1
А) Для цепных и пластинчатых конвейеров
,
где z зв – число зубьев тяговой звездочки;t – шаг тяговой звездочки,мм .
Б) Для ленточных транспортеров, механизмов передвижения и поворота, дискового питателя, лебедки и др.
,
где D – диаметр исполнительного механизма,мм .
,
где 
 … — КПД отдельных звеньев кинематической
цепи, ориентировочные значения которых
рекомендуется принимать по
таблице 1.
… — КПД отдельных звеньев кинематической
цепи, ориентировочные значения которых
рекомендуется принимать по
таблице 1.
Таблица 1.
Ориентировочные значения КПД составных элементов привода
Звенья кинематической цепи | Обозначение | |
Зубчатые передачи: |
| |
Червячная передача закрытая |
| |
Ременные передачи открытые: |
| |
Цепная передача открытая |
| |
Муфта соединительная |
| |
Подшипники (одна пара): |
|




Расчетная мощность электродвигателя ,кВт
 ,
,
где
 — мощность на приводном валу,кВт .
— мощность на приводном валу,кВт .
Необходимо подобрать электродвигатель переменного тока мощностью
(кВт ) ближайшей к
 .
.
При подборе допускается перегрузка двигателя до 6% при постоянной нагрузке. Оценить перегрузку двигателя по формуле:
, где
 — наименьшее из значений мощности
— наименьшее из значений мощности
 и
и
.
Значению мощности
соответствует, как правило, четыре электродвигателя с определенной синхронной частотой вращения:
 =
750; 1000; 1500; 3000мин -1 . При
постоянной нагрузке расчет привода
вести по номинальной частоте вращения
электродвигателя
=
750; 1000; 1500; 3000мин -1 . При
постоянной нагрузке расчет привода
вести по номинальной частоте вращения
электродвигателя
 .
Электродвигатели переменного тока
серии АИР представлены в таблице 2.
.
Электродвигатели переменного тока
серии АИР представлены в таблице 2.
Таблица 2.
Технические данные двигателей серии АИР
Мощность N, кВт | Синхронная частота, об/мин | |||
Примечания.
Над чертой указан тип двигателя, под чертой – номинальная частота вращения.
Пример обозначения двигателя: «Двигатель АИР100 L 2 ТУ 16-525.564-84»
 , где
, где
 — частота вращения приводного вала,мин -1 .
— частота вращения приводного вала,мин -1 .
Рассчитывается для каждого значения номинальной частоты вращения электродвигателя при назначенной мощности
.
А) Назначить передаточное отношение открытой передачи привода
 по рекомендациям табл. 3 с учетом
следующего: предпочтительно меньшее
значение передаточного отношения, что
обеспечит меньшие габариты передачи.
по рекомендациям табл. 3 с учетом
следующего: предпочтительно меньшее
значение передаточного отношения, что
обеспечит меньшие габариты передачи.
Таблица 3.
Значения передаточных отношений механических передач
Тип передачи | Передаточное отношение | |
Предельное | ||
Зубчатая цилиндрическая: закрытая; открытая | ||
Зубчатая коническая: закрытая; открытая | ||
Червячная | ||
Ременная | ||
Планетарная простая однорядная | ||
Для зубчатой передачи передаточное отношение согласовать со стандартным рядом номинальных передаточных чисел u по ГОСТ 2185:
1-й ряд: 1; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,00; 10; 12,5 …
2-й ряд: 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9,0; 11,2…

где n — целое число.
 .
.
Примечание . Если в приводе открытая передача отсутствует, то
 .
.
В) Для зубчатого редуктора передаточное отношение согласовать со стандартным рядом номинальных передаточных чисел u по ГОСТ 2185; для червячного редуктора с однозаходным червяком — передаточное отношение является целым числом. При этом отклонение фактического передаточного отношения редуктораот номинальногоне должно превышать 2,5% при
4,5 и 4% при
4,5.
Отклонение оценить по формуле:
 ,
,
где
 — наименьшее из значений передаточного
отношения редуктораи.
— наименьшее из значений передаточного
отношения редуктораи.
Примечание. Для одноступенчатого редуктора
 ,
,
где u — номинальное передаточное число ступени редуктора.
Уточнить тип электродвигателя для назначенной разбивки передаточного отношения привода (табл. 2).
Мощность на каждом валу привода ,кВт :
где
 … — КПД отдельных звеньев кинематической
цепи.
… — КПД отдельных звеньев кинематической
цепи.
Частота вращения валов привода ,мин -1 :
les74.ru
