AVR. Учебный Курс. Отладка программ. Часть 1
У каждого случалась такая ситуация — программа вроде бы написана, даже компилится, но не работает. Почему не работает? Дак все же просто — в ней есть лажа!
Процесс избавления программ от лажи называется, соответственно, отлаживанием. И часто этот процесс длится куда дольше разработки, особенно в хитрых случаях, с привлечением внешней периферии.
В очередном цикле статей я постараюсь описать как можно более подробно методы, применяемые при отладке.
Метод 0. Тупление в код (Аналитический)
К моему великому удивлению, данный метод является наиболее популярным в народе и, а у начинающих порой единственным.
Видимо сказывается засилье всяких высокоуровневых языков вроде ПОХАПЭ или Си, где такое вполне может и проканать. Там да, можно пофтыкать несколько минут в исходник, глядишь да найдешь где накосячил.
И по наивности, не иначе, новички пытаются этот метод применить к своим ассемблерным программам.
И вот тут мозг срывает напрочь. С непривычки голова пухнет от попытки удержать в памяти состояние регистров, флагов, попыток просчитать куда пойдет ядро на следующем шаге.
Из этого же лезет народ убежденность в том, что ассемблерные программы сложны в написании и отладке.
Хотя я, в свое время, изучал ассемблер вообще без компа — не было его у меня. Тетрадка в клеточку, команды i8008 в столбик. А потом и Z80 с его божественным ассемблером. И опять без отладчиков, аналитически. Ляпота! Но вот когда я сел за ассемблер 80С51, в первую же очередь я нашел нормальную IDE с эмуляцией — Keil uVision. А эра х86 прошла под знаменем Borland Turbo Debugger и TASM. Когда моя первая 128 байтная интруха полыхнула по экрану пиксельным пламенем клеточного автомата… да ощущения были еще те. Где то ее сорцы валяются, надо поискать.
В написании может быть, но вот в отладке нифига подобного. Так как нечего тут думать. Ассемблер это как лопата — берешь и копаешь, а не думаешь как там поршни и трансмиссия в экскаваторе крутится.
А вот когда уже есть некоторый опыт ковыряния с ассемблером, когда всякие ветвления-переходы-адресации разруливаешь в уме, вот тогда аналитическим тупняком можно сходу искать баги. Но это для мастеров низкоуровневого кунг-фу. Поначалу, быстрей и проще пройтись трейсером по коду.
Под каждый стиль написания кода свои инструменты отладки. Поэтому переходим к другому методу.
Метод 1. Лопата — бери и копай (Трассировка)
Не можешь понять как будет вести код? Как сработают условия? Как пойдет ветвление? Что будет в регистрах?
Что тут думать? Выполни в эмуляторе и все! Какая-нибудь AVR Studio идеально для этого сгодится.
Компилируй программу и запускай на выполнение, а дальше выполняй ее пошагово, наблюдая за регистрами, флагами, переменными. Да за чем угодно, все в твоей власти.
Но тут есть ряд тонкостей, для кого-то очевидных, а кому-то и в голову не придет. Поэтому сыграю в Капитана и разжую их все.
Трассировка
Активно используй не только пошаговую трассировку (F11), но и такие удобные фичи как трассировка до курсора (Ctrl+F10), позволяющая сразу же выполнить весь код до курсора. Правда может застрять в каком нибудь цикле по пути. Но можно нажать на паузу и вытащить трассировщик из цикла вручную (выставив флаги так, чтобы произошел нужный нам переход).
Обход ненужных условий
Условия, встречающиеся на пути, довольно легко обходятся путем установки вручную нужных флагов. А если логика отлаживаемого участка от этого не пострадает, то можно и временно закомментить мешающий код. Если до нужного участка кода предстоит продраться через несколько десятков условий, то можно облегчить себе задачу, воткнув сразу же после всех нужных инициализаций секцию DEBUG
1 2 3 | ;-----DEBUG JMP KUDA_NADO ;---------- |
;——DEBUG JMP KUDA_NADO ;———-
И все. И не напрягаясь отладить нужный участок, а потом удалить этот переход, чтобы вернуть логику программы в прежнее русло.
Генерация прерываний
Если нужно отлаживать прерывание, то необязательно этого прерывания дожидаться. Помни, что вызов прерывания делается установкой флага в соответствующем регистре. Т.е. хочешь ты сэмулировать прием байта по UART — тыкай на бит RXC регистра UCSRA и вот у тебя на следующем же шаге произошло прерывание. Разумеется если оно разрешено локально и глобально.
Если хочешь запустить прерывание в случайный момент. То нет ничего проще — запусти программу на исполнение (F5) через пару секунд тупления в монитор нажми паузу (Ctrl+F5), тычком по нужному биту сгенерь прерывание, а дальше пошагово влезь в обработчик и позырь что там происходит. После чего проверь, что выход из прерывания произошел корректно и пусти прогу пастись дальше.
Ускоряй процессы
Многие процессы на трассировке идут весьма длительно. Например, в режиме скоростного прогона (F5) эмуляция секунды на моем компе (AThlonXP 1300+/512DDRPC3200) идет около минуты, если не больше. Разумеется ждать столько западло.
Но зачем ждать? если алгоритм задержки верен, то что нам мешает взять и уменьшить время с секунд до десятков миллисекунд?
Если задержка сделана на таймере, то можно временно уменьшить предделители таймеров в 1. Или даже выставить другие значения уставок. Главное, не забыть вернуть все как было.
Остановка по требованию
Это в маршрутках остановок «Здеся» и «тута» не существует. В нашей же симуляции мы можем выгрузиться в пошаговый режим где угодно, хоть посреди МКАД в час пик. Достаточно применить волшебный щелчок по почкам.
Используй брейкпоинты или точки останова. Их можно ставить на произвольные участки кода и в режиме запуска на автомате (F5) симулятор сам воткнется в ближайший брейкпоинт. А дальше вручную, пошагово, проходим трудный участок. Выясняя почему он работает не так.
Причем брейкпоинты можно ставить не только на участки кода, но и на события происходящие в регистрах. Это, так называемые, Data Breakpoint. Ставятся они из Debug-NewBreakPoint-DataBreakPoint
А там на выбор событий тьма:
 |
Например, хочешь ты поймать событие когда кто то стукнулся в ОЗУ и нагадил, запоров значение. Кто такой поганец? Стек? Где то в коде опечатался и не заметил? Индексный регистр не туда залез?
Чем гадать и тупить в код лучше поставить бряк. Например, загадилась переменная CCNT объявленная в RAM:
1 2 3 4 5 | ; RAM ======================================================== .DSEG CCNT: .byte 4 TCNT: .byte 4 ; FLASH ====================================================== |
; RAM ======================================================== .DSEG CCNT: .byte 4 TCNT: .byte 4 ; FLASH ======================================================
Выбираешь тип события, Location is Acessed (доступ к обьекту) в поле location выбираешь объект за которым будем следить В выпавшем списке будут ВСЕ твои символические имена используемые в программе. В том числе и наши CCNT и TCNT. Надо только внимательно поискать — они там не в алфавитном порядке, а черт знает в каком.
Дальше выбираешь тип доступа к переменной (Access Type) — чтение или запись, а может и то и другое. Также можно указать тип данной переменной или ее байтовый размер.
А еще можно в памяти разметить колышками Start Addr — End Addr (в графе Custom Scope) делянку, где наша конопля растет. И как только туда кто сунется — алярм, ловить и пинать по почкам.
А через контекстное меню, можно по быстрому, на любой регистр, ячейку ОЗУ/ПЗУ/EEPROM повесить Data breakpoint. При этом он сразу же появляется в окошке Breakpoints&TracePoints и там уже можно подправить ему конфигурацию как нужно.
Осталось только заполнить графу хитов Break Execution after… Т.е. после скольких событий останавливать трассировку. По умолчанию стоит 1. Но если, например, нам надо пропустить несколько сотен итераций цикла, а на сто первом посмотреть что происходит, то указываем число хитов в 100 и жмем запуск, не страдая фигней на промотке этих итераций.
Есть там еще одна интересная галочка — Continue executions after views have been updated. Она превращает бряк в информер. Думаю ты уже замечал, что когда студия гонит код в режиме выполнения (F5), то данные в окошках периферии и регистрах в реальном времени не меняются. Чтобы увидеть изменения надо поставить программу на паузу.
Своего рода автоматическое пошаговое выполнение (Alt+F5), но обновление не по каждой команде, а по условию. Да, превратить обычный путевой бряк в информер можно, но для этого надо открыть окно управления брейкпоинтами View-Toolbars-Breakpoint&TracePoint. И там уже, найдя наш путевой брейк, даблкликом по нему залезть в свойства.
Там же бряки можно оперативно включать-выключать, что очень удобно. Выключать и включать их также можно по F9.
Пускай на самотек
Если программа в железе ведет себя как то не так, то может у ней крышу сорвало? Когда пишешь на ассемблере (да и на Си тоже, но там поймать сложней) легко ошибиться со стеком или индексным переходом. А сразу не поймаешь. Далеко не факт, что срыв найдется при первом или втором пошаговом прогоне. В этом случае я просто жму запуск симуляции и ухожу нарезать колбаски и чаю налить. Прихожу — жму паузу. Если прога идет по своему циклу, значит все в порядке. Если же произошел срыв, то это будет сразу же видно — трассировщик сойдет с ума и выбросит тебя из исходного кода в дизассемблер, где будет видно, что происходит что то явно не из нашей оперы. Например, выполнение кода там где его нет — за пределами программы. Если такое случилось надо внимательно проверить возможные пути срыва. Наставив брейков на входы-выходы из прерываний, перед и после индексных переходов и так далее.
Еще тут может помочь режим автошага (Alt+F5) нажал его и студия сама начала шустро тикать тактами, сразу же показывая что происходит. Тебе же остается сидеть и тупить в этот телевизор, глядишь найдешь глюк. Пару раз я таким способом отлавливал ошибки атомарного доступа, вылезавшие только в полнолуние и исключительно по спец мантре.
Глядим внимательно
Несмотря на то, что можно тупить в регистры, порты или напрямую в память, делать это все равно неудобно — глаз замыливается разглядывать в этой каше наши значения. Даже несмотря на то, что при изменении они подкрашиваются красным. Тут нам поможет очередной инструмент студии Watch (вызывается по Alt+1). Ватч это гляделка. С ее помощю можно наши выделенные переменные пихать в отдельные окошки, где за ними удобно наблюдать.
Навести гляделку можно на что угодно — на регистр, на ячейку памяти, на порт. При этом мы можем выбирать тип отображения (DEC,HEX,ASCII), что бывает очень удобно.
А если мы отлаживаем Сишный код, то watch умеет показывать структуры и массивы не в виде кучи барахла в памяти (какими они на самом деле и являются), а красиво раскладывая все по полочкам.
Эмуляция периферии
Внутреннюю периферию отлаживать проще простого — все прерывания вот они, свисают в IO регистрах, дергай не хочу. Регистры там же. А вот внешняя…
Тут все плохо. Дело все в том, что Студия не имеет понятия о том, что есть за ее пределами. Поэтому либо отлаживать периферию ручным тыком по битам в портах (что ужасно муторно), либо юзать примочки вроде HAPSIM или StiGen от ARV. Да, пользуясь моментом, рекомендую прошуршать по сайту arv.radioliga.com — много интересных штуковин. Проблем они всех не решают, но лучше чем ничего.
Трассировка по Сишному коду
А тут все весело. Дело в том, что оптимизатор может так залихватски перелопатить код, что на исходный код он будет походить весьма и весьма отдаленно. Т.е. ты грузишь переменную в одном месте, а компилятор решил это сделать в самом начале программы. Работать то будет так как ты сказал, но вот отлаживать это… Некоторые участки кода вообще будут перепрыгиваться.
Т.к. оптимизатор все заоптимизировал за счет других строк, а промежуточные варианты тебе в виде отчета забыл предоставить.
В общем, я понимаю почему трассировка среди тех кто пытается писать на Си не прижилась. В том виде в каком ее видишь в первый раз пользоваться ей не хочется совершенно. В самом деле, кому охота связываться с дебильным симулятором? Проще уж в код тупить, там хоть какая то логика есть.
Но не стоить хоронить трассировку по высоким языкам раньше времени. Если отбросить приколы с выполнением некоторых участков кода, то все еще вполне ничего. А если выключить на время оптимизацию (параметр -O0), то вообще самое то. Правда отлаживать совсем без оптимизации я бы не советовал.
Т.к. с оптимизатором там есть свои приколы и грабли. И при несоблюдении ряда правил (volatile, пустые циклы и прочие фишечки), код который прекрасно работает без оптимизации на -Os с треском разваливается на куски.
Но общую логику работы программы отследить можно. А учитывая умные гляделки, бряки, информеры… так вообще сказка!
Но это далеко не все методы отладки. А так, самая малость. Однако трассировкой можно выловить 90% проблем связанных с внутренней периферией и алгоритмом работы кода на уровне ядра.
Впереди же будут описаны еще реалтаймовые способы на реальном железе — дебаг выводы, развлекухи с осциллографом, облизывание на логический анализатор и JTAG мониторы.
Не обойду вниманием и симуляторы вроде PROTEUSа, хотя я с недавних пор предпочитаю ими не пользоваться — мне своих глюков хватает.
easyelectronics.ru
Советы начинающим программистам микроконтроллеров / Habr
Очень давно хотелось поделиться своим опытом, с начинающими радиолюбителями, потому что об этом пишут очень мало и разрозненно. Мой опыт не хороший, не плохой, он такой какой есть. С некоторыми утверждениями вы в праве не согласиться и это нормально, ведь у каждого свое видение ситуации. Цель данного материала, обратить внимание читателя на некоторые вещи, что то взять на заметку и сформировать собственное мнение и видение ситуации, ни в коем случае нельзя воспринимать это как истину.1. Многие начинающие электронщики не знают с чего начать, поэтому спрашивают совета. Большинство бывалых радиолюбителей ответят, что начни собирать какую нибудь схему. Естественно в голове любого начинающего сразу мелькает LCD дисплей с jpeg картинками, какой нибудь mp3 плеер или часы, без малейшей мысли о том, что не имея базовых знаний это неподъемная задача.
Я категорически против такого подхода. Обычно это все заканчивается — либо ничем, либо забитые форумы с мольбами помочь. Даже если кому то помогают, то в 90% он больше никогда не всплывет на сайтах по электронике. В остальных 10% он так и продолжает заливать форумы мольбами, его будут сначала пинать, затем поливать грязью. Из этих 10% отсеивается еще 9%. Далее два варианта: либо таки до глупой головы доходит и все же происходит goto к началу, либо в особо запущенных вариантах, его удел копировать чужие конструкции, без единой мысли о том как это работает. Из последних зачастую рождаются ардуинщики.
Путь с нуля на мой взгляд заключается в изучении периферии и особенностей, если это микроконтроллер. Правильнее сначала разобраться с тем как дрыгать ножками, потом с таймерами, затем интерфейсами. И только тогда пытаться поднимать свой FAT. Да это не быстро, да это потребует времени и усилий, но практика показывает, как бы вы не пытались сократить этот путь, все равно всплывут проблемы, которые придется решать и время вы потратите куда больше, не имея этой базы.
Только не нужно путать теплое и мягкое. Первое — из всех правил есть исключения, лично видел людей, которые в руках раньше не держали микроконтроллеров, но за крайне короткий срок смогли обскакать бывалых опытных радиолюбителей, их в расчет не берем. Второе — мне попадались личности, которые начинали с копирования схем и сходу разбирались, но скорее это тоже исключение из правил. Третье — и среди ардуинщиков попадаются опытные программисты, это ведь всего навсего платформа, но и это скорее исключение.
Если говорить об общей массе, то дела обстоят именно так как я описал вначале: нежелание разбираться с основами, в лучшем случае оттягивает момент того, когда придется вернуться к этим вопросам. В худшем случае, вы быстро упретесь в потолок своих знаний и все время винить в своих проблемах кого то другого.
2. Перед решением задачи, дробите ее до абсурда вплоть до «припаять резистор», это помогает, проверено. Мелкие задачи решать куда проще. Когда большая задача разбита на кучу мелких действий, то все что остается — это выполнить их. Могу привести еще один годный совет, хоть он вам и покажется бредовым — заведите блокнотик и пишите в него все что собираетесь сделать. Вы думаете, итак запомню, но нет. Допустим сегодня у меня хорошее настроение и думаю о том, как собрать плату. Запиши план действий: сходить купить резистор, подготовить провода, сделать крепление дисплея. Потом все забудешь, откроешь блокнотик и смотришь — ага сегодня настроение попилить и построгать, сделаю крепление. Или собираешь ты плату и уже осталось допаять последний компонент, но не тут то было резисторы кончились, вот записал бы перед тем как паять, то вспомнил.
3. Не пользуйтесь кодогенераторами, нестандартными фичами и прочими упрощалками, хотя бы на первых этапах. Могу привести свой личный пример. Во времена активного использования AVR я пользовался кодогеном CAVR. Меня он полностью устраивал, хотя все говорили, что он кака. Звоночки звенели постоянно, были проблемы с библиотеками, с синтаксисом, с портированием, но было тяжело от этого отказаться. Я не разбирался как это работает, просто знал где и как поставить галочки.
Кол в мой гроб был вбит с появлением STM32, нужно было обязательно переползать на них, вот тогда то и появились проблемы. Проблемы мягко сказано, фактически мне пришлось осваивать микроконтроллеры и язык Си с нуля. Больше я не повторял прошлых ошибок. Надо сказать это уже пригодилось и не один раз. С тех пор мне довелось поработать с другими платформами и никаких затруднений не испытываю, подход оправдывает себя.
По поводу всех улучшалок и упрощалок, было одно очень хорошее сравнение, что они подобны инвалидным коляскам, которые едут по рельсам, можно ехать и наслаждаться, но вставать нельзя, куда везут — туда и приедешь.
4. Изучайте язык Си. Эх, как же часто я слышу, как начинающие радиолюбители хвалятся, что хорошо знают сишку. Для меня это стало кормом, всегда люблю проконсультироваться у таких собеседников. Обычно сразу выясняется, что язык они совершенно не знают. Могу сказать, что не смотря на кажущуюся простоту, людей которые действительно хорошо бы его знали, встречал не так много. В основном все его знают на столько, на сколько требуется для решения задач.
Однако, проблема на мой взгляд заключается в том, что не зная возможностей, вы сильно ограничиваете себя. С одной стороны не оптимальные решения, которые потребуют более мощного железа, с другой стороны не читаемый код, который сложно поддерживать. На мой взгляд, читаемость и поддерживаемость кода занимает одно из важнейших мест и мне сложно представить, как можно этого добиться не используя все возможности языка Си.
Очень многие начинающие брезгуют изучением языка, поэтому если вы не будете как все, то сразу станете на две ступени выше остальных новичков. Так же не никакой разницы, где изучать язык. На мой взгляд, микроконтроллер для этого не очень подходит. Гораздо проще поставить какую нибудь Visual studio или Qt Creator и порешать задачки в командной строке.
Хорошим подспорьем будет также изучение всяких тестов по языку, которые дают при собеседованиях. Если порыться то можно много нового узнать.
5. Изучение ассемблера? Бояться его не нужно, равно как и боготворить. Не нужно думать, что умея написать программу на ассемблере, вы сразу станете гуру микроконтроллеров, почему то это частое заблуждение. В первую очередь это инструмент. Даже если вы не планируете использовать его, то все равно я бы настоятельно рекомендовал написать хотя бы пару программ. Это сильно упростит понимание работы микроконтроллера и внутреннего устройства программ.
6. Читайте даташит. Многие разработчики, пренебрегают этим. Изучая даташит вы будете на две ступени выше тех разработчиков. Делать это крайне полезно, во первых это первоисточник, какие бы сайты вы не читали, в большинстве случаев они повторяют информацию из даташита, зачастую с ошибками и недосказанностями. Кроме того, там может находиться информация, о которой вы не задумываетесь сейчас, но которая может пригодиться в будущем. Может статься так, что вылезет какая то ошибка и вы вспомните что да, в даташите об этом было сказано. Если ваша цель стать хорошим разработчиком, то этого этапа не избежать, читать даташиты придется, чем раньше вы начнете это делать, тем быстрее пойдет рост.
7. Часто народ просит прислать даташит на русском. Даташит — это то, что должно восприниматься как истина, самая верная информация. Даже там не исключены ошибки. Если к этому добавятся ошибки переводчика, он ведь тоже человек, может даже не нарочно, просто опечататься. Либо у него свое видение, может что-то упустить, на его взгляд не важное, но возможно крайне важное для вас. Особенно смешной становится ситуация, когда нужно найти документацию на не сильно популярные компоненты.
На мой взгляд, намного проще исключить заранее весь слой этих проблем, чем вылавливать их потом. Поэтому я категорически против переводов, единственный верный совет — изучайте английский язык, чтобы читать даташиты и мануалы в оригинале. Понять смысл фразы с помощью программ переводчиков можно, даже если уровень вашего языка полный ноль.
Мною был проведен эксперимент: в наличии был студент, даташит и гугл переводчик. Эксперимент №1: студенту вручен даташит и дано задание самостоятельно найти нужные значения, результат — «да как я смогу», «да я не знаю английский», «я ничего не нашел/я не понял» типичные фразы, говорящие о том, что он даже не пытался. Эксперимент №2: тому же студенту, вручен все тот же даташит и тоже задание, с той разницей, что я сел рядом. Результат — через 5 минут он сам нашел все нужные значения, абсолютно без моего участия, без знания английского.
8. Изобретайте велосипед. Например, изучаете какую то новую штуку, допустим транзистор, дядька Хоровиц со страниц своей книги авторитетно заявляет, что транзистор усиливает, всегда говорите — НЕ ВЕРЮ. Берем в руки транзистор включаем его в схему и убеждаемся что это действительно так. Есть целый пласт проблем и тонкостей, которые не описываются в книгах. Прочувствовать их можно только, когда возьмешь в руки и попробуешь собрать. При этом получаем кучу попутных знаний, узнаем тонкости. Кроме того, любая теория без практики забудется намного быстрее.
На первоначальном этапе, мне очень сильно помог один метод — сначала собираешь схему и смотришь как она работает, а затем пытаешься найти обоснование в книге. То же самое и с программной частью, когда есть готовая программа, то проще разобраться в ней и соотнести куски кода, какой за что отвечает.
Также важно выходить за рамки дозволенного, подать побольше/поменьше напряжение, делать больше/меньше резисторы и следить за изменениями в работе схемы. В мозгу все это остается и оно пригодится в будущем. Да это чревато расходом компонентов, но я считаю это неизбежным. Первое время я сидел и палил все подряд, но теперь перед тем как поставить тот или иной номинал, всегда вспоминаю те веселые времена и последствия того, если поставить неверный номинал.
9. А как бы я сделал это, если бы находился на месте разработчиков? Могу ли я сделать лучше? Каждый раз задавайте себе эти вопросы, это очень хорошо помогает продвигаться в обучении. Например, изучите интерфейсы 1wire, i2c, spi, uart, а потом подумайте чем они отличаются, можно ли было сделать лучше, это поможет осознать почему все именно так, а не иначе. Так же вы будете осознавать, когда и какой лучше применить.
10. Не ограничивайтесь в технологиях. Важно что этот совет имеет очень тонкую грань. Был этап в жизни, когда из каждой подворотни доносилось «надо бы знать ПЛИС», «а вот на ПЛИС то можно сделать». Формально у меня не было целей изучать ПЛИСины, но и пройти мимо было никак нельзя. Этому вопросу было выделено немного времени на ознакомление. Время не прошло зря, у меня был целый ряд вопросов, касаемых внутреннего устройства микроконтроллеров, именно после общения с плисинами я получил ответы на них. Подобных примеров много, все знания, которые я приобретал в том или ином виде, рано или поздно пригодились. У меня нет ни единого бесполезного примера.
Но как было сказано, вопрос технологий имеет тонкую грань. Не нужно хвататься за все подряд. В электронике много направлений. Может вам нравится аналог, может цифра, может вы специалист по источникам питания. Если не понятно, то попробуйте себя везде, но практика показывает, что вначале лучше сконцентрироваться на чем то конкретном. Даже если нужно жать в нескольких направлениях, то лучше делать это ступеньками, сначала продавить что то одно.
11. Если спросить начинающего радиолюбителя, что ему больше нравится программирование или схемотехника, то с вероятностью 99% ответ будет программирование. При этом большую часть времени эти программисты тратят на изготовление плат ЛУТом/фоторезистом. Причины в общем то понятны, но довольно часто это переходит в некий маразм, который состоит в изготовлении плат ради изготовления плат.
В интернетах практически единственный трушный путь к программированию это стать джедаем изготовления печатных плат. Я тоже прошел через этот путь, но каждый раз задаю себе вопрос зачем? С тех пор, как я приобрел себе пару плат, на все случаи жизни, каждый раз думаю о том, что мог бы спокойно прожить все это время без самодельных плат. Мой совет, если есть хоть капля сомнений, то лучше не заморачиваться и взять готовую отладочную плату, а время и средства лучше бы потратить на программирование.
12. Следующий совет, особенно болезненный, мне очень не хочется его обсуждать, но надо. Часто мне пишут, мол ххх руб за ууу дорого, где бы подешевле достать. Вроде бы обычный вопрос, но обычно я сразу напрягаюсь от него, так как зачастую он переходит в бесконечные жалобы на отсутствие денег. У меня всегда возникает вопрос: почему бы не оторвать пятую точку и не пойти работать? Хоть в тот же макдак, хоть на стройку, потерпеть месяц, зато потом можно приобрести парочку плат, которых хватит на ближайший год. Да я знаю, что маленьких городах и селах сложно найти работу, переезжайте в большой город. Работайте на удаленке, в общем нужно крутиться. Просто жаловаться нет смысла, выход из ситуации есть, кто ищет его тот находит.
13. В ту же копилку внесу очень болезненный вопрос инструмента. Инструмент должен позволять вам максимально быстро разрабатывать устройства. Почему то очень многие разработчики не ценят свое время. Типичный пример, дешевая обжимка для клемм, на которой так любят экономить многие работодатели. Проблема в том, что она даже обжимает не правильно, из-за этого провода вываливаются. Приходится производить кучу дополнительных манипуляций, соответственно тратить время. Но как известно дурак платит трижды, поэтому низкая цена кримпера возрастет во много раз, за счет затрачиваемого времени и плохого качества обжима.
Не говорю что дешевое = плохое, нет — все зависит от ситуации. Вернусь к примеру кримпера, было время когда обжимал чем попало, поэтому часто возникали проблемы. Особенно неприятно, когда заводишь плату и она не работает, после долгих поисков ошибки понимаешь что из-за плохо обжатого проводочка, обидно. С тех пор как появилась нормальная обжимка этих проблем нет. Да внутренняя жаба и квакала, и душилась от ее стоимости, но ни разу не пожалел об этом решении. Все что я хочу сказать, что поработав с нормальным инструментом, совершенно не хочется возвращаться к плохому, даже не хочется обсуждать это. Как показывает практика, лучше не экономить на инструментах, если сомневаетесь — возьмите у кого нибудь потестить, почитайте отзывы, обзоры.
14. Заведите сайт, можно писать на нем, что угодно, просто как записки. Практика показывает, что работодатели все равно его не читают, но сам факт производит большой эффект.
15. Тонкий вопрос: профильное высшее образование, нужно ли оно? Мне известны не единичные случаи, когда люди работали абсолютно без образования и по опыту и знаниям они могли дать прикурить любому дипломированному специалисту. Собственно, у меня нет профильного образования, испытываю ли я от этого дискомфорт? В определенной степени да.
Еще в самом начале, когда микроконтроллеры были для меня хобби, я много помогал с курсовыми и дипломами разных вузов, просто чтобы оценить свой уровень. Могу сказать уверенно, что уровень в целом невысок вне зависимости от имени вуза. Учиться несколько лет, для того чтобы написать такой диплом, совершенно необязательно. Достигнуть этого можно самостоятельно за весьма короткий срок. И все же зачастую бывали моменты, когда студенты знали какой то предмет, который они проходили на 2-3 курсе, а я этого не знал. Хоть все эти знания и компенсировались самообразованием, но все же лучше было бы не тратить на это время.
Вуз ради бумажки. Могу сказать, что были и такие ситуации, когда предлагали работу, которая требовала обязательного наличия образования и было обидно, что именно в тот момент бумажки не было. Но в целом, история показывает, что большинству работодателей наплевать на вашу бумажку.
Следующий момент довольно часто не учитывается, это окружение. Не забывайте, что люди, с которыми вы учитесь это ваше поколение, не исключено что вам с ними работать. Количество фирм работающих в одной отрасли сильно ограничено. Практика показывает, что даже в больших городах все и все друг о друге знают, вплоть до интимных подробностей.
Еще один момент это возможности. Зачастую у вузов есть свои возможности — оборудование, может какие то секции, может какие то программы работы за рубежом, этим нужно пользоваться, если есть хоть малейшая возможность. Если в вузе вы не видите перспективы, идите в другой, мир на каком то одном не заканчивается.
Если подытожить то совет таков: если есть хоть малейшая возможность — нужно идти учиться, обязательно по профилю, если есть хоть какие то шансы, то лезть везде, а не отсиживать штаны на задней парте. Заводить знакомства, параллельно дома самому практиковаться, развиваться.
16. Поздно ли начинать программировать в 20, 30, 40, 50 лет? Практика других людей показывает, что возраст вообще не помеха. Многие почему то не учитывают то, что есть целый пласт работы, которую молодые в силу своих амбиций не хотят делать. Поэтому работодатели предпочитают брать тех, кто будет ее тащить. Это ваш шанс зацепиться, а дальше все зависит только от вас.
И последний совет. Многие радиолюбители необщительные, сердитые и раздражительные — считайте это спецификой работы. Излучайте добро и позитив, будьте хорошим человеком.
habr.com
Средства программирования PIC-контроллеров / Habr
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем. В этой работе рассматриваются средства программирования PIC контроллеров: MPLAB, Matlab/Simulink и программатор PIC-KIT3 в следующих разделах.
• Характеристики миниатюрного PIC контроллера PIC12F629
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В (< 6,5В)
• Потребление:
— <1,0 мА @ 5,5В, 4МГц
— 20 мкА (тип) @ 32 кГц, 2,0В
— <1,0 мкА (тип) в режиме SLEEP@2,0В
• Рассеиваемая мощность: 0,8Вт
• Многофункциональные каналы ввода/вывода: 6/5
• Максимальный выходной ток портов GPIO: 125мА
• Ток через программируемые внутренние подтягивающие резисторы портов: ≥50 (250) ≤400 мкА @ 5,0В
• Разрядность контроллера: 8
• Тактовая частота от внешнего генератора: 20 МГц
Длительность машинного цикла: 200 нс
• Тактовая частота от внутреннего RC генератора: 4 МГц ±1%
Длительность машинного цикла: 1мкс
• FLASH память программ: 1К
Число циклов стирание/запись: ≥1000
• ОЗУ память данных: 64
• EEPROM память данных: 128
Число циклов стирание/запись: ≥10K (-40оС ≤TA≤ +125 оС)
• Аппаратные регистры специального назначения: 16
• Список команд: 35 инструкций, все команды выполняются за один машинный цикл,
кроме команд перехода, выполняемых за 2 цикла
• Аппаратный стек: 8 уровней
• Таймер/счетчик ТМR0: 8-разрядный с предделителем
• Таймер/счетчик ТМR1: 16-разрядный с предделителем
Дополнительные особенности:
• Сброс по включению питания (POR)
• Таймер сброса (PWRTтаймер ожидания запуска генератора (OST
• Сброс по снижению напряжения питания (BOD)
• Сторожевой таймер WDT
• Мультиплексируемый вывод -MCLR
• Система прерываний по изменению уровня сигнала на входах
• Индивидуально программируемые для каждого входа подтягивающие резисторы
• Программируемая защита входа
• Режим пониженного энергопотребления SLEEP
• Выбор режима работы тактового генератора
• Внутрисхемное программирование ICSP с использованием двух выводов
• Четыре пользовательские ID ячейки
Предельная рабочая температура для Е исполнения (расширенный диапазон) от -40оС до +125 оС;
Температура хранения от -65оС до +150 оС.
КМОП технология контроллера обеспечивает полностью статический режим работы, при котором остановка тактового генератора не приводит к потере логических состояний внутренних узлов.
Микроконтроллер PIC12F629 имеет 6-разрядный порт ввода/вывода GPIO. Один вывод GP3 порта GPIO работает только на вход, остальные выводы можно сконфигурировать для работы как на вход так и на выход. Каждый вывод GPIO имеет индивидуальный бит разрешения прерываний по изменению уровня сигнала на входах и бит включения внутреннего подтягивающего резистора.
Интегрированная среда разработки MPLAB IDE
MPLAB IDE — бесплатная интегрированная среда разработки ПО для микроконтроллеров PIC включает средства для создания, редактирования, отладки, трансляции и компоновки программ, записи машинного кода в микроконтроллеры через программаторы.
Загрузка MPLAB IDE
Бесплатные версии MPLAB (включая MPLAB 8.92) хранятся на сайте компании Microchip в разделе «DOWNLOAD ARCHIVE».
Создание проекта
Пример создания проекта программ PIC контроллера в среде MPLAB включает следующие шаги [2].
1. Вызов менеджера проекта.
2. Выбор типа PIC микроконтроллера.
3. Выбор компилятора, например, Microchip MPASM для ассемблера.

4. Выбор пути к каталогу проекта (клавиша Browse…) и ввод имени проекта.
5. Подключение файлов к проекту в окне Project Wizard → Step Four можно не выполнять. Это можно сделать позднее, внутри активного проекта. Клавиша Next открывает следующее окно.
6. Завершение создания проекта (клавиша Finish).
В результате создания проекта FirstPrMPLAB интерфейс MPLAB принимает вид, показанный на Рис. 1.

Рис. 1. Интерфейс среды MPLAB v8.92 и шаблон проекта.
Создание файла программы
Программу можно создать при помощи любого текстового редактора. В MPLAB имеется встроенный редактор, который обеспечивает ряд преимуществ, например, оперативный лексический анализ исходного текста, в результате которого в тексте цветом выделяются зарезервированные слова, константы, комментарии, имена, определенные пользователем.
Создание программы в MPLAB можно выполнить в следующей последовательности.
1. Открыть редактор программ: меню → File → New. Изначально программе присвоено имя Untitled.
2. Набрать или скопировать программу, например, на ассемблере.
3. Сохранить программу под другим именем (меню → File → Save As), например, FirstPrMPLAB.asm.

Рис. 2. Пример простейшей программы (на ассемблере) вывода сигналов через порты контроллера GP0, GP1, GP2, GP4, GP5 на максимальной частоте.
Запись ‘1’ в разряде регистра TRISIO переводит соответствующий выходной буфер в 3-е состояние, в этом случае порт GP может работать только на вход. Установка нуля в TRISIO настраивает работу порта GP на выход.
Примечание. По спецификации PIC12F629 порт GP3 микроконтроллера работает только на вход (соответствующий бит регистра TRISIO не сбрасывается – всегда находится в ‘1’).
Регистры TRISIO и GPIO находятся в разных банках области памяти. Переключение банков выполняется 5-м битом регистра STATUS.
Любая программа на ассемблере начинается директивой org и заканчивается директивой end. Переход goto Metka обеспечивает циклическое выполнение программы.
В программе (Рис. 2) используются следующие обозначения.
Директива LIST — назначение типа контроллера
Директива __CONFIG — установка значений битов конфигурации контроллера
Директива equ — присвоение числового значения
Директива org 0 — начало выполнения программы с адреса 0
Команда bsf — устанавливает бит указанного регистра в 1
Команда bсf — сбрасывает бит указанного регистра в 0
Команда movlw — записывает константу в регистр W
Команда movwf — копирует содержимое регистра W в указанный регистр
Команда goto — обеспечивает переход без условия на строку с меткой
Директива end — конец программы
Установка требуемой конфигурации микроконтроллера
Конфигурация микроконтроллера PIC12F629 зависит от настроек слова конфигурации (2007h), которые можно задать в программе через директиву __CONFIG.
Непосредственно или через окно MPLAB: меню → Configure → Configuration Bits:
Где:
Бит 2-0 — FOSC2:FOSC0. Выбор тактового генератора
111 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как CLKOUT
110 — Внешний RC генератор. Подключается к выводу GP5. GP4 работает как ввод/вывод
101 — Внутренний RC генератор 4МГц. GP5 работает как ввод/вывод. GP4 — как CLKOUT
100 — Внутренний RC генератор 4МГц. GP5 и GP4 работают как ввод/вывод
011 — EC генератор. GP4 работает как ввод/вывод. GP5 — как CLKIN
010 — HC генератор. Резонатор подключается к GP4 и GP5
001 — XT генератор. Резонатор подключается к GP4 и GP5
000 — LP генератор. Резонатор подключается к GP4 и GP5Бит 3 — WDTE: настройка сторожевого таймера (Watchdog Timer)
1 — WDTE включен
0 — WDTE выключенСторожевой таймер предохраняет микроконтроллер от зависания – перезапускает программу через определенный интервал времени если таймер не был сброшен. Период таймера устанавливается в регистре OPTION_REG. Обнуление сторожевого таймера вызывается командой CLRWDT.
Бит 4 — PWRTE: Разрешение работы таймера включения питания:
1 — PWRT выключен
0 — PWRT включенТаймер задерживает микроконтроллер в состоянии сброса при подаче питания VDD.
Бит 5 — MCLR: Выбор режима работы вывода GP3/-MCLR
1 — работает как -MCLR
0 — работает как порт ввода-вывода GP3Бит 6 — BODEN: Разрешение сброса по снижению напряжения питания (как правило < 2.0В)
1 — разрешен сброс BOR
0 — запрещен сброс BOR автоматически включается таймерПри разрешении сброса BOR автоматически включается таймер PWRT
Бит 7 — .CP: Бит защиты памяти программ от чтения программатором
1 Защита выключена
0 Защита включенаПри выключения защиты вся память программ стирается
Бит 8 — .CPD: Бит защиты EPROM памяти данных
1 Защита выключена
0 Защита включенаПосле выключения защиты вся информация будет стерта
Бит 11-9 — Не используются: Читается как ‘1’.
Бит 13-12 — BG1:BG0. Биты калибровки сброса по снижению питания
00 — нижний предел калибровки
11 — верхний предел калибровки
Добавление программы к проекту
Пример добавления программы к проекту показан на (Рис. 3).

Рис. 3. Добавление программы FirstPrMPLAB.asm к проекту FirstPrMPLAB.mcp
Сохранить материалы проекта можно командой: меню → File → Save Workspace.
Компиляция
Чтобы создать бинарный файл с расширением hex для прошивки микроконтроллера необходимо откомпилировать проект. Запуск компиляции выполняется командой меню → Project → Build All. Результаты компиляции можно увидеть в окне Output (Рис. 1). Если в программе нет ошибок, то компилятор выдаёт сообщение об успешной компиляции: BUILD SUCCEEDED, загрузочный HEX файл можно найти в рабочем каталоге:
Отладка программы
Отладку программы в среде MPLAB IDE можно выполнить при помощи аппаратного эмулятора MPLAB REAL ICE или программного симулятора MPLAB SIM. Запуск последнего выполняется как показано на Рис. 4.

Рис. 4. Подключение к симулятору MPLAB SIM для отладки программы.
После запуска отладчика в окне Output (Рис. 1) появляется закладка MPLAB SIM, куда MPLAB выводит текущую информацию отладчика. Команды отладчика (Рис. 5) после запуска становятся активными.

Рис. 5. Команды отладчика.
Команды отладчика:
• Run — Непрерывное выполнение программы до точки останова (Breakpoint) если таковая установлена.
• Halt — Остановка программы на текущем шаге выполнения.
• Animate — Анимация непрерывного выполнения программы.
• Step Into — Выполнение по шагам (вызовы Call выполняются за один шаг).
• Step Over — Выполнение по шагам включая команды вызовов Call.
• Reset — Начальная установка программы. Переход указателя на первую команду.
• Breakpoints — Отображение списка точек останова. Обработка списка.
При выполнении программы по шагам текущий шаг выделяется стрелкой (Рис. 6). Непрерывное выполнение программы останавливается командой Halt или достижением программой точки останова. Точка останова устанавливается/снимается в строке программы двойным щелчком.
Пример программы на ассемблере, которая с максимальной скоростью меняет состояние портов контроллера показан на Рис. 6 (справа). Программа передаёт в регистр портов GPIO данные b’10101010’ и b’01010101’. Поскольку в регистре GPIO передачу данных в порты контроллера выполняют не все разряды, а только 0,1,2,4 и 5, то состояние регистра GPIO (Рис. 6, слева) отличается значениями: b’00100010’ и b’00010101’.

Рис. 6. Состояние регистров специального назначения контроллера на момент выполнения программы (слева) и выполняемая по шагам программа (справа).
В процессе отладки можно наблюдать за состоянием регистров, переменных, памяти в соответствующих окнах, открываемых в разделе View основного меню. В процессе отладки можно вносить изменения в код программы, содержимое регистров, памяти, изменять значения переменных. После изменения кода необходимо перекомпилировать программу. Изменение содержимого регистров, памяти и значения переменных (окна раздела View: Special Function Register, File Register, EEPROM, Watch) не требует перекомпиляции.
Входные сигналы портов модели микроконтоллера можно задать в разделе Debugger → Stimulus. Устанавливаемые состояния сигналов портов привязываются к времени (тактам) отладки.
Иногда результаты выполнения программы в режиме отладки не соответствуют выполнению этой же программы в реальном контроллере, так, например, отладчик программы (Рис. 6) без инструкций movlw 0x07 и movwf cmcon показывает, что выходы GP0 и GP1 регистра GPIO не изменяются — находятся в нулевом состоянии, содержимое регистра GPIO попеременно равно 0x14 и 0х20. Однако, контроллер, выполняющий программу без указанных инструкций, показывает на осциллографе циклическую работу всех пяти выходов: 0x15 и 0х22, включая GP0 и GP1 (см. Рис. 7).
Осциллограммы контроллера, выполняющего циклы программы Рис. 6 (Metka… goto Metka) показаны на Рис. 7.

Рис. 7. Осциллограммы выхода GP0 (слева) и GP1 (справа) микроконтроллера PIC12F629, работающего от внутреннего 4МГц RC генератора. Программа (Рис. 6) формирует сигналы максимальной частоты на всех выходах контроллера. За период сигналов 5.3 мкс выполняется 5 команд (6 машинных циклов), амплитуда GP0 сигнала на осциллограмме равна 4.6В, измеренное программатором питание контроллера 4.75В.
Прошивка микроконтроллера
Для записи программы в микроконтроллер (прошивки контроллера) необходимо микроконтроллер подключить к интегрированной среде MPLAB IDE через программатор. Организация подключения показана ниже в разделе «Подключение программатора PIC-KIT3».
Примечание. В контроллер PIC12F629 записана заводская калибровочная константа настройки частоты внутреннего тактового генератора. При необходимости её можно прочитать и восстановить средствами MPLAB с использованием программатора.
Команды для работы с программатором и изменения его настроек находятся в меню MPLAB Programmer. Тип программатора в MPLAB выбирается в разделе: меню → Programmer → Select Programmer.
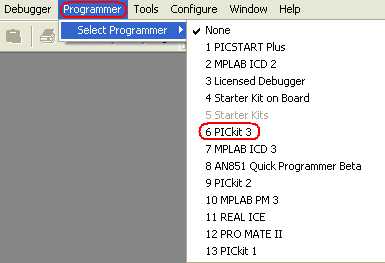
Рис. 8. Выбор программатора для подключения к среде MPLAB.
Прошивка микроконтроллера через программатор запускается командой: меню → Programmer → Program. Сообщение об успешной прошивке показано на Рис. 9.
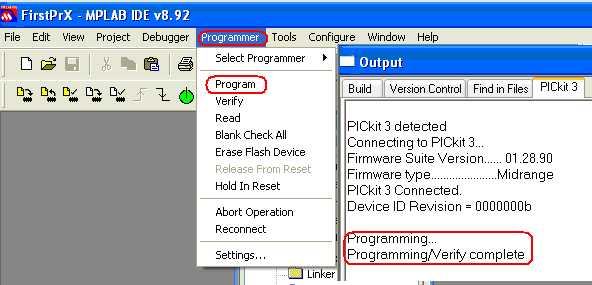
Рис. 9. Запуск прошивки микроконтроллера и вид сообщения об успешной прошивке.
Примечание: Во время прошивки микроконтроллера у программатора PIC-KIT3 мигает желтый светодиод.
Подключение MATLAB/SIMULINK к MPLAB
В системе моделирования динамических систем Simulink (приложение к Matlab) на языке графического программирования [7] можно разрабатывать программы для семейства PIC контроллеров имеющих АЦП/ЦАП, счетчики, таймеры, ШИМ, DMA, интерфейсы UART, SPI, CAN, I2C и др.
Пример Simulink программы PIC контроллера показан на Рис. 10.

Рис. 10. Пример программы на языке графического программирования для PIC контроллера выполненной в среде моделирования динамических систем Simulink.
Взаимодействие средств разработки и компиляции программ для PIC контроллеров в Simulink показано на Рис. 11 [6].

Рис. 11. Структура средств построения адекватной модели PIC контроллера на языке графического программирования.
Для построения среды разработки необходимы следующие компоненты Matlab:
• Simulink
• Real-Time Workshop Embedded Coder
• Real-Time Workshop
И Cи компилятор компании Microchip:
• C30 для контроллеров PIC24, dsPIC30 и PIC33
• или C32 для контроллеров серии PIC32
Установка компонентов Matlab
На сайте имеются Simulink библиотеки (dsPIC Toolbox) для PIC контроллеров и версий Matlab c R2006a по R2012a:
Для скачивания библиотеки необходимо зарегистрироваться. Программы поддерживают работу 100 микроконтроллеров из серий PIC 16MC, 24F, 30F, 32MC, 33F, 56GP, 64MC, 128MC, 128GP.
Бесплатные версии работают с Simulink моделями PIC контроллеров имеющих до 7 портов ввода-вывода.
Для установки dsPIC Toolbox — библиотеки блоков PIC контроллеров для Matlab/Simulink необходимо [4]:
• Скачать dsPIC Toolbox для требуемой версии Matlab.
• Распаковать zip файл в папке, в которой будут установлены Simulink блоки.
• Запустить Matlab.
• Настроить текущий каталог Matlab на папку с распакованным файлом.
• Открыть и запустить файл install_dsPIC_R2012a.m, например, кнопкой меню или клавишей клавиатуры.
Библиотеки dsPIC и примеры Simulink моделей устанавливаются в текущую папку Matlab (Рис. 12). Установленные блоки для моделирования PIC контроллеров доступны в разделе Embedded Target for Microchip dsPIC библиотеки Simulink (Рис. 13).

Рис. 12. Содержимое текущего каталога после выполнения install_dsPIC_R2012a.m.
Рис. 13. Блоки, установленной библиотеки «Embedded Target for Microchip dsPIC».
Для совместной компиляции Simulink модели средствами Matlab и MPLAB необходимо прописать в переменной окружения path Matlab с высшим приоритетом путь к каталогу MPLAB с файлами MplabOpenModel.m, MplabGetBuildinfo.m и getHardwareConfigs.m:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path) Установка Си компилятора MPLAB
Компиляторы MPLAB находятся на сайте Microchip (Download Archive → MPLAB C Compiler for PIC24 and dsPIC DSCs). Для установки демонстрационной версии компилятора С30 необходимо его скачать по ссылке PIC24/dsPIC v3.25 (Рис. 14) и запустить принятый файл mplabc30-v3.25-comboUpgrade.exe.
Рис. 14. Версии Си компилятора (слева) и режимы его установки (справа).
Примечание. Работа выполнена с версией v3.25 компилятора С30 для PIC24/dsPIC. Проверка показала, что следующая версия v3.30 не поддерживает совместную компиляцию моделей Matlab R2012a (dsPIC Toolbox) без ошибок.
Установочный exe файл создаёт в разделе c:\Program Files (x86)\Microchip\ новый каталог mplabc30 с файлами:

Рис. 15. Каталоги компилятора C30 MPLAB.
Последовательность Simulink программирования для PIC контроллеров
1. Создайте рабочий каталог и скопируйте в него *.mdl примеры из раздела example (см. Рис. 12).
2. Загрузите Matlab. Настройте его на рабочий каталог.
3. Включите в переменную окружения path Matlab с высшим приоритетом путь к MPLAB — каталогу c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\:
>> path('c:\Program Files (x86)\Microchip\MPLAB IDE\Tools\MATLAB\',path) Примечание: Использование команды >>path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
>>rmpath(' c:\Program Files\Microchip\MPLAB IDE\Tools\MATLAB\')4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.

Рис. 16. Выбор типа контроллера в блоке Master модели.
5. Проверьте настройки конфигурации модели: Меню → Simulation → Configuration Parameters <Ctrl+E>. В строке ввода System target file раздела Code Generation должен быть указан компилятор S-функций dspic.tlc (Рис. 17). Выбор dspic.tlc настраивает все остальные параметры конфигурации модели, включая шаг и метод интегрирования.

Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.

Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).

Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:
Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:
со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).

Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).

Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).
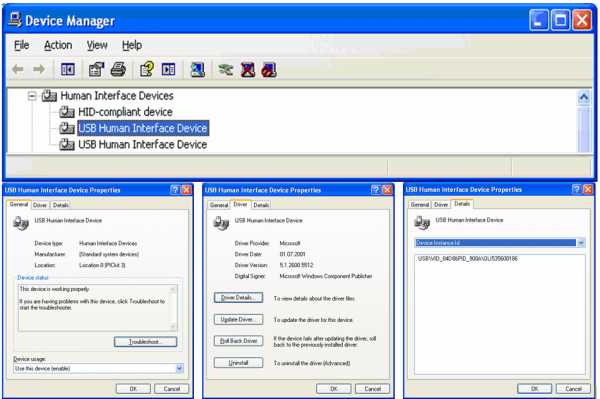
Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.

Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].
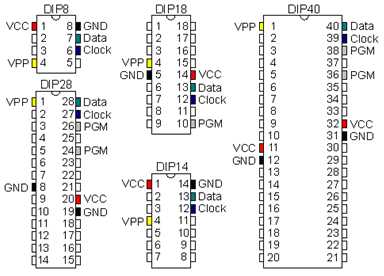
Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use
Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.
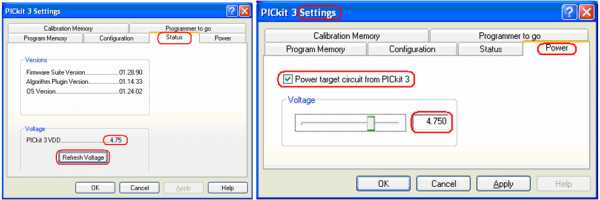
Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.
Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].

Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.
habr.com
Программирование AVR урок 3 — прошиваем микроконтроллер
Доброго времени суток. Продолжим. После того, как мы ознакомились с процессом отладки написанной нами программы в «atmel studio» и виртуально собрали схему с одним светодиодом в «proteus», пришло время собрать схему в «железе» и прошить микроконтроллер.

Для программирования опытного экземпляра (atmega 8) будем использовать программатор USBASP. Он выглядит следующим образом:


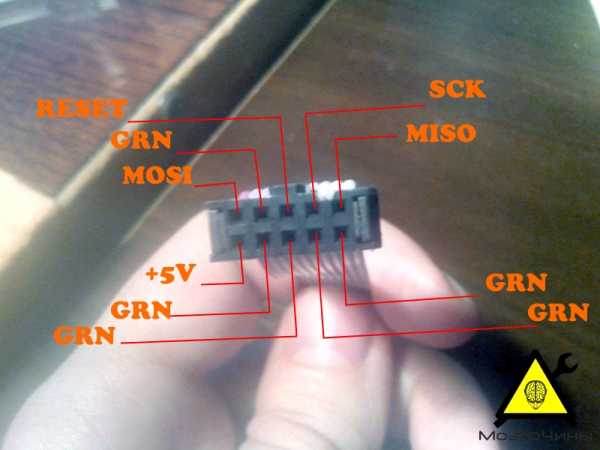
К разъему будет подключатся шлейф, в который подключаются джамперы, что в свою очередь будут подключены к гнездам макетной платы, на которой установлен микроконтроллер:



Первый вывод отмечен на разъеме стрелочкой.

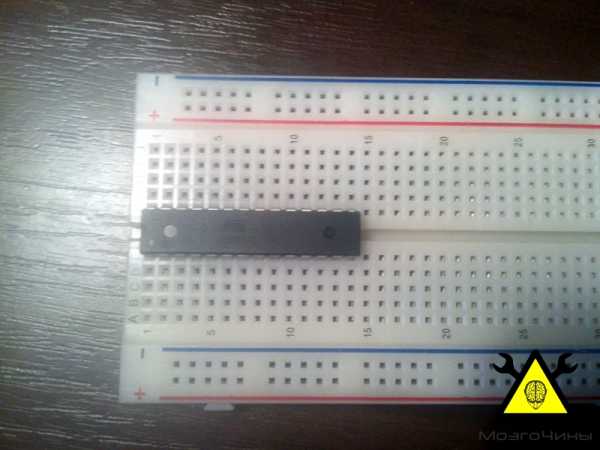
После того, как разобрались с программатором. Переходим к сбору схемы в «железе». Монтируем микроконтроллер на макетную плату. Напоминаю — первая ножка отмечена на МК маленьким кружком.
 Задача состоит в том, чтобы соединить выводы программатора с выводами «камня».
Задача состоит в том, чтобы соединить выводы программатора с выводами «камня».
Подключаем джамперы в 10 контактный разъем. Задействуем следующие выводы MOSI, RST, SCK, MISO, VTG (VCC), GND.
Надеюсь вы уже скачали datasheet на atmega8. Если нет, его можно скачать здесь. Смотрим на распиновку выводов микроконтроллера.

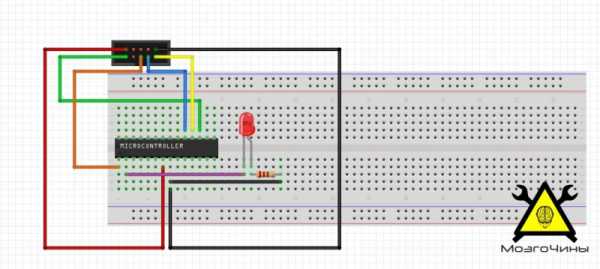
Соединяем джамперы со следующими выводами:
- VCC к 7 выводу МК;
- SCK к 19 выводу МК;
- MISO к 18 выводу МК;
- MOSI к 17 выводу МК;
- GND (10 вывод программатора) к 8 выводу МК;
- RST к 1 выводу МК;
Для дальнейшем успешной работы, операционная система при первом запуске шайтан-машины (программатора) предложить установить необходимые для работы устройства драйвера.
При работе с экспишкой проблем возникнуть не должно. Скачиваем драйвер. Создаём папку, в которую распаковываем скаченный архив. После чего в мастере установки оборудования указываем путь на папку с разархивированным драйвером.
Если вы работаете в windows 7 или выше, могут возникнуть небольшие трудности. Драйвера для программатора достаточно старые, поэтому у них нет цифровой подписи. При попытке установить такой драйвер операционка выдаст, что-то на подобии этого *
«Не удается проверить цифровую подпись драйверов, необходимых для данного устройства. При последнем изменении оборудования или программного обеспечения могла быть произведена установка неправильно подписанного или поврежденного файла либо вредоносной программы неизвестного происхождения. (Код 52)».
Чтобы исправить ситуацию нужно отключить проверку цифровой подписи драйвера. Описывать способы отключения не буду (у каждого своя операционная система), их можно найти в интернете.
После того, как отключите проверку подписи, в мастере установки оборудования укажите путь на папку с разархивированным драйвером.

Надеюсь у вас всё получилось и программатор готов к работе.
Переходим к сбору схемы со светодиодом.

Для прошивки микроконтроллера будем использовать программу «avrdudeprog». Она лежит в общем архиве.

Выбираем atmega8 из списка микроконтроллеров. После того, как выбрали МК появиться окошко, которое известит о том, что фьюзы и Lock биты установлены по умолчанию.
Следующим шагом будет нужно считать калибровочные ячейки. Если вы подключили всё правильно, то увидите следующее сообщение.

Затем открываем вкладку фьюзы (Fuses). Простыми словами Fuses — это конфигурационные настройки МК, с которыми лучше не играть. Для случая, когда вы приобрели такой же контроллер, как я и у вас нет внешнего кварцевого резонатора (вы используете внутренний генератор тактовой частоты), выставляете точно такие галочки, как представлены на картинке. Обязательно возле пункта «инверсные» должна стоять галочка.
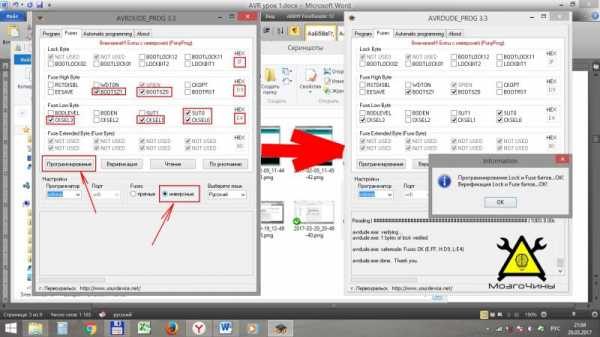
Выставленные настройки «командуют» Atmega8A выполнять свою работу при условии тактирования от внутреннего генератора (частота тактирования 8 МГц). Для того, чтобы настройки вступили в силу нужно нажать кнопку «Программирование». Но перед нажатием еще два раза проверьте все ли выставили должным образом.
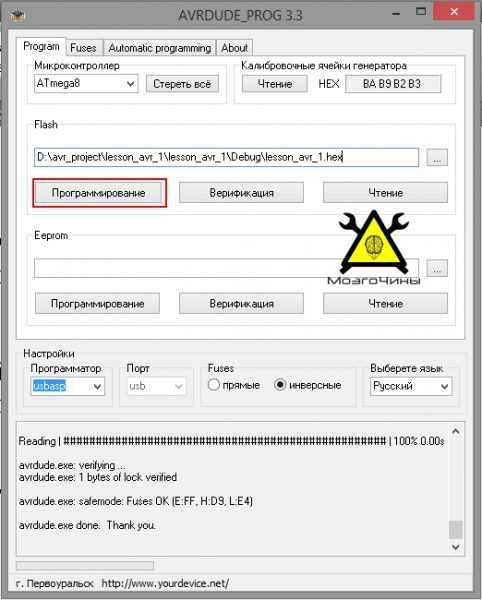
Возвращаемся на страницу «Program».
После того, как мы уже сообщили программе, какой именно микроконтроллер будем шить, выбираем файл прошивку, которую написали в прошлом уроке. Она имеет расширение HEX. Находится в папке «Debug»
Перед тем, как прошивать «камушек» нажимаем на кнопку «Стереть все». Это обезопасит вас от непонятных ошибок (вдруг камень уже шили):

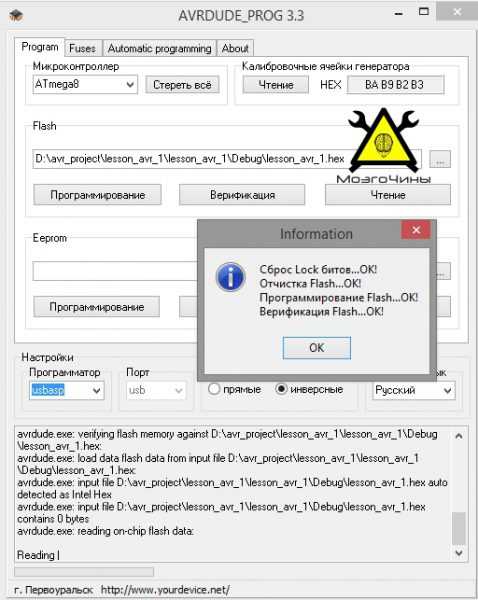
Нажимаем «Программирование». Если все прошло успешно программа выдаст
Архив с драйверами
Datasheet на atmega8
Картотека программирования
Наслаждаемся результатом своей работы 🙂 Продолжение следует…
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!
About alexlevchenko
Ценю в людях честность и открытость. Люблю мастерить разные самоделки. Нравится переводить статьи, ведь кроме того, что узнаешь что-то новое — ещё и даришь другим возможность окунуться в мир самоделок.mozgochiny.ru
Программы | MEGA-AVR
Популярная мощная и удобная среда разработки и отладки программ для микроконтроллеров и процессоров архитектуры ARM:
Cortex-M0, M3, M4, M7, A9
Proteus — это пакет программ для автоматизированного проектирования электронных схем, версии 8.7 NEW!!! Continue reading →
В статье приводится USB программатор микроконтроллеров AVR и AT89S, совместимый с AVR910 — с журнала Радио №7, 2008г. Continue reading →
Новая версия(но не самая последняя) на момент публикации. Программа как всегда с ключами и лицензией).
Continue reading →
Стабильная версия Proteus Professional 8.4 SP0 без глюков и вылетов (проверено на windows 7). Continue reading →
Программа схемотехнического моделирования Micro-Cap имеет удобный, дружественный интерфейс и предъявляет достаточно скромные требования к программно-аппаратным средствам персонального компьютера. Continue reading →
Новая версия компилятора кода для AVR на си. Continue reading →
Новая версия программы SinaProg 2.1.1 с русифицированным калькулятором фьюзов.
Continue reading →
Как то при разработке очередного устройства в котором данные от одного устройства к другому передавались по UART, нужно было проверить работоспособность схемы и программы. Continue reading →
LabVIEW 8.6 демонстрируют увеличение скорости работы, более эффективную загрузку процессора и повышенную надежность систем реального времени на выделенных ядрах. Continue reading →
Circuit Design Suite — одна из наиболее популярных в мире программ конструирования электронных схем, характеризуется сочетанием профессиональных возможностей и простоты, расширяемостью функций от простой настольной системы до сетевой корпоративной системы. Continue reading →
Компилятор CodeVisionAVR 2.04. Continue reading →
Новое в 8 версии: Application Framework
Теперь Proteus 8 состоит из одного приложения с большим количеством модулей (ISIS, BOM, ARES, 3D Viewer и т.д.). Continue reading →
mega-avr.com.ua
РадиоКот :: Программаторы для микроконтроллеров Atmel
РадиоКот >Лаборатория >Цифровые устройства >Программаторы для микроконтроллеров Atmel
Эта статья — попытка обобщить некоторый разрозненный материал по программаторам для популярных сегодня микроконтроллеров фирмы Atmel. Материал не претендует на полноту, однако основан на личном опыте, в чем и состоит, на мой взгляд, его основная ценность.
Схема программатора Fun-Card
Программатор предназначен для работы под управлением программы ICProg, является функциональным аналогом «5 проводков»
(до предела упрощенная схема STK200+/300, о которой ниже) и представляет собой несколько резисторов.
Программатор подключается к LPT-порту. Разъем устанавливается непосредственно на плату программатора, кроме того, на плате
предусмотрена кроватка для программирования контроллера AT90S2313, а также выведены сигналы SCK, MOSI/MISO и Reset.
Программируемая микросхема может брать питание с порта LPT, в этом случае, на выводах 2, 3, 4 порта должны быть установлены единицы,
а вывод 2 разъёма ISP должет быть подключен к выводу Vcc микросхемы. Некоторые порты могут не потянуть такой нагрузки, в этом
случае придётся использовать внешний источник питания (5В).
Источником тактовых импульсов для микросхемы также может служить LPT порт. В этом случае вывод 3 разъёма ISP (LED) должен быть
подключен к выводу XTAL 1 программируемой микросхемы.
Естественно, программа программатора на PC должна понимать эти режимы работы (для работы с этой схемой нужно воспользоваться программой
IC-Prog, где при выборе типа программатора следует установить «Fun-Card Programmer»).
Печатная плата в формате SL5 – здесь, программа ICProg и драйвер под ХР – здесь.
Схема программатора STK200+/300
Большая часть нижеследующего описания и сама схема взята со странички https://ln.com.ua/~real/avreal/adapters.html, крайне рекомендую посетить ее.
Адаптер получил свое название от комплектующихся им отладочных плат фирмы Atmel для быстрого начала работы с микроконтроллерами
At90s8515 и Atmega103. На самом деле приведенная схема соответствует одновременно обоим адаптерам, в ней присутствуют перемычки для
определения наличия как адаптера STK200 (выводы 2-12 разъема X1), так и STK300 (выводы 3-11). При необходимости программной генерации
тактового сигнала XTAL1 используется линия LED адаптера, исходно предназначенная для включения светодиода (на печатной плате ver.1
установлен только светодиод, сигнал XTAL1 на разъем программирования не заведен, а вот в ver.2 на третьем контакте есть сигнал XTAL1).
Буферизованные адаптеры запитываются от платы с программируемым процессором, т.е. питание подаётся на программируемую плату, а с
неё на адаптеры поступает через шлейф.
Адаптер собран на основе шинного формирователя 74HC244 (аналог 1564АП5). Возможно также использование 555АП5 (74LS244) и 1533АП5 (74ALS244)
либо, при соответствующем изменении схемы, любые другие неинвертирующие формирователи с тремя состояниями выходов. Применение буфера
с третьим (высокоимпедансным) состоянием позволяет по окончании программирования снять сигнал разрешения выходов и, «отключив» адаптер
от схемы, не влиять на её работу (за исключением паразитных емкостей между проводами шлейфа от адаптера до платы устройства).
Поскольку разводка рассчитана на установку LPT-разъема непосредственно на плату, для этих адаптеров рекомендуется изготовить удлиннитель
порта LPT длиной 1.5-1.8м со всеми линиями (земель не жалеть 🙂 и вывести с программатора шлейф до платы с микроконтроллером длиной 20-25 см.
На плате предусмотрена установка светодиодов «питание» и «программирование» (на схеме не показаны).
Схема работает с программами AVR ISP, CodeVision AVR, WinAVR и другими.
В ряде случаев (например, для программирования нескольких контроллеров одной и той же прошивкой или в случае отсутствия на плате места
под ISP-разъем) могут оказаться полезными «платы расширения» для различных контроллеров, содержащие кроватку для установки контроллера и
минимально необходимую для работы обвязку. Я сделал такие платы под AT90S2313/ATTiny2313, ATTiny26, ATTiny13, ATMega8 и ATMega16.
Кроме того, в версии ver.1 кроватки для ATTiny26 и ATTiny13 есть непосредственно на плате.
Обе версии платы программатора и все «платы расширения» в формате SL5 – здесь.
Вот так выглядит один из моих STK в окружении плат расширения:
Схема программатора AVR910 с универсальным COM/USB интерфейсом
AVR910 – весьма известный аппнот Atmel, давший название целому классу устройств.
Сейчас под AVR910 понимают как правило протокол, по которому происходит обмен данными между компьютером и программатором.
В сети на данный момент можно найти несколько вариантов таких программаторов, различающихся способом реализации интерфейсной части.
Традиционно все эти программаторы собираются на основе микроконтроллера AT90S2313 или (в редких случаях, при наличии модифицированной
прошивки) ATTiny2313.
На схеме представлен программатор, способный работать как через CОМ, так и через USB.
Переключение типа интерфейса происходит при помощи джампера J1. При работе через USB питание программатора осуществляется непосредственно
от этого порта компьютера, причем в этом режиме имеется полная гальваническая развязка программатора (и, соответственно, программируемого
устройства) от компьютера, более того, при замыкании перемычки J2 программируемое устройство может питаться от программатора (до 100 мА).
При работе через СОМ-порт развязка отсутствует, а питание программатора осуществляется, как обычно, от программируемого устройства.
Интерфейс USB реализован на микросхеме FT232BM в стандартной схеме включения, в качестве согласователя уровней для СОМ-порта применена
MAX232.
Вариант разводки печатной платы, схема и прошивка лежат здесь. Разводка платы не оптимальна, поскольку
осуществлялась для конкретного
корпуса с заранее заданным расположение разъемов, органов управления и индикации. Кроме того, на плате разведена кнопка для принудительного сброса
программируемого МК, реально она не нужна, поскольку сброс корректно осуществляется программным образом. Также на плате присутствует разъем для
программирования МК самого программатора.
Для подключения программатора к СОМ-порту служит трехконтактный разъем PLS и потребуется изготовить специальный шнурок.
Замечу, что поскольку здесь используется стандартная разводка шнурка для ISP, с этим программатором можно использовать платы расширения от STK200+/300.
Этот комплект у меня выглядит вот так:
Этот программатор работает у меня под управлением CodeVision AVR 25-ой сборки. Такой выбор обусловлен возможностью регулирования скорости порта непосредственно из программы. Программатору свойственны некоторые особенности в силу применения микросхемы FT232BM, в частности, необходимо выставить минимальную задержку в свойствах соответствующего виртуального СОМ-порта (подробнее смотрите статью USB — RS-232 преобразователи). После этого программирование осуществляется довольно быстро (хотя и чуть медленнее STK200+/300, что, естественно, вызвано последовательным способом передачи данных в программатор).
Схема AVR910-совместимого USB программатора (схема Prottoss»a)
Автором этой конструкции является Рыжков Андрей, известный также под ником PROTTOSS. Описанию этого программатора посвящена одна из страничек его сайта, там же можно найти контакты для связи с автором. Здесь этот материал публикуется с разрешения автора,
так что все формальности соблюдены. :)
Программатор выполнен на основе драйвера от Objective Development
и полностью совместим по командам с оригинальным программатором AVR910 от ATMEL. Описание оригинальной схемы программатора можно взять в
Application Note AVR910: In-System Programming, а список поддерживаемых команд можно посмотреть в
Application Note AVR109: Self Programming
Исходно схема устройсва выглядит следующим образом:
Светодиоды VL1, VL2 сигнализируют о текущих действиях программатора, и, соответственно, обозначают режимы чтения и записи.
Светодиод VL3 служит для сигнализации подачи питания на программатор.
Резисторы R10 — R14 предназначены для согласования уровней сигналов контроллера программатора и программируемого контроллера.
С помощью J3 LOW SCK возможно понижать тактовую частоту порта SPI МК программатора до ~20 кГц. При разомкнутом джампере частота SPI
нормальная, при замкнутом — пониженная. Переключать джампер можно «на ходу», так как управляющая программа МК программматора проверяет состояние
линии PB0 при каждом обращении к порту SPI. Не рекомендуется переключать джампер при запущенном процессе записи/чтения программируемого МК, т.к.,
скорее всего, это приведет к искажению операции записи/чтения. Данный джампер введен для возможности программирования МК AVR, тактированных от
внутреннего генератора 128 кГц.
Схема была несколько переработана, в нее внесены следующие изменения.
Питание МК осуществляется от USB, но не через диоды, как в исходной схеме,
а через LDO стабилизатор LM1117 на 3.3В. Замечу, что при таких напряжениях питания (как 3.3 В здесь, так и 3.6 В в исходной схеме) и частоте кварца 12 МГц
Atmel не гарантирует устойчивую работу своих МК, однако к чести производителя ни один из тестировавшихся микроконтроллеров работать не отказался.
Тем не менее, стоит учитывать такую возможность. Еще раз: чем больше напряжение питания (в пределах до 5В, естественно), тем выше вероятность того, что контроллер запустится и будет
устойчиво работать, поэтому многие отказываются от LDO в пользу двух диодов. Да, предохранитель тоже отсутствует, но, если добавить, хуже точно не будет.
В обе цепи питания МК (VCC и AVCC) введены дополнительные LC-фильтры в виде SMD-индуктивностей на 10мкГн и конденсаторов 0.1 мкФ (в принципе, дроссель в AVCC можно заменить перемычкой,
его установка — совсем уж перестраховка), кроме того, на плате появился дополнительный джампер, позволяющий
запитывать целевую плату от программатора напряжением 5В или 3.3 В или, естественно, вообще не питать ее от программатора. В цепь питания целевой платы
также включена индуктивность и установлен диод 1N4148, препятствующий попаданию питающего напряжения с целевой платы (если оно там есть) на программатор. Замечу, что поскольку на диоде
имеет место падение напряжения, то напряжение питания целевой платы будет меньше заявленного на величину этого самого падения. В зависимости от диода и некоторых других условий
теоретически оно может снизиться настолько, что его не хватит для нормального функционирования целевой платы. Для уменьшения эффекта можно использовать в этой цепи диод Шоттки,
а вообще, может быть стоит вообще отказаться от такой возможности, решайте сами, насколько оно вам надо… :)
Исчез джампер NORM/MOD, предназначенный для ввода программатора в режим обновления прошивки, вместо этого на плате установлен полноценный разъем для программирования
МК программатора (разъем имеет несколько нестандартный вид и представляет собой контактную гребенку PLS-6, на которую выведены следующие сигналы в последовательности
MOSI-MISO-SCK-Reset-Vcc-GND. В такой же последовательности эти сигналы расположены на выводах МК ATMega16 в корпусе DIP-40, именно оттуда я ее и «срисовал». Такой
разъем занимает меньше места на плате и как правило проще разводится, чем стандартный 10-ти контактный ISP-коннектор, поэтому лично я часто им пользуюсь в своих конструкциях).
Кроме того, уменьшены до 220 Ом последовательные резисторы в линиях программирования (вообще, их номинал — отдельный открытый вопрос) и до 22 Ом в линиях USB.
Все эти изменения можно проследить на печатной плате (кроме изменения номиналов резисторов, в подписях элементов они оставлены прежними), разводку которой можно скачать в конце статьи.
Плата получилась односторонняя с парой перемычек и рассчитана на установку МК ATMega8 в кроватке, у которой удалены неиспользуемые выводы. Можно, конечно, и впаять туда Мегу,
откусив лишние выводы, но это на ваш страх и риск.
Собранный программатор выглядит так:
После сборки программатора следует прошить МК в нем (прошивка в конце статьи), при этом фьюзы для МК нужно выставить следующим образом:
Теперь, если все собрано правильно, при подключении программатора к ПК обнаружится новое устройство и потребуется установка драйверов. Драйвера, естественно, без цифровой подписи, так что просто игнорируем предупреждения ОС по этому поводу. В общем-то, на этом установка и заканчивается. Если у вас не ХР, а Win2000, то требуются некоторые дополнительные манипуляции, за подробным описанием которых (как, впрочем, и всей конструкции вцелом) я попрошу вас обратиться на сайт автора. В системе должен появиться новый виртуальный СОМ-порт, через который и работает этот программатор, стоит настроить номер этого порта и скорость. Естественно, используемый вами софт нужно будет настроить на работу именно с этим портом.
Вот еще вариант платы этого программатора на микроконтроллере в корпусе TQFP, делал под конкретный корпус, схема та же, работает не хуже:
При всем уважении к автору не могу не заметить, что среди повторивших эту схему встречаются люди, у которых она работать отказывается. Сложно объективно сказать, с чем
это может быть связано, однако лишний раз призову к соблюдению рекомендаций и внимательной сборке устройства. В остальном, из личного опыта, претензий к программатору нет,
работает достаточно устойчиво (несколько раз наблюдались сложности при длинных шлейфах к программируемому устройству, другие программаторы в этих же условиях сбоя не давали),
скорость приемлемая, но не очень высокая, естественно.
В качестве возможных доработок могу предложить не питать МК программатора пониженным напряжением, а поставить на линии USB стабилитроны, чтобы ограничить напряжение на них.
Идея не проверялась.
Лично я свой первый МК AT90S2313 программировал с помощью Fun Card, потом собрал и до сих пор плотно использую несколько вариантов STK200+/300, а с AVR910 работаю в основном в «полевых условиях», когда требуется подключение программатора к ноутбуку без LPT-порта.. Вот такая вот эволюция..
Вопросы, как обычно, складываем тут.
Файлы:
Плата Fun Card в формате SL5
Софт для Fun Card
Платы в формате SL5 для STK200+/300
Схема (RusPlan6), плата (SL5) и прошивка (hex) для AVR910
Плата (SL5), прошивка (hex) и драйвера для USB AVR910 от PROTTOSS»a
Плата (P-CAD 2006) для USB AVR910 от PROTTOSS»a на Atmega8 в корпусе TQFP (SMD вариант)
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Миниатюрный USB программатор для AVR микроконтроллеров / Habr
Как театр начинается с вешалки, так программирование микроконтроллеров начинается с выбора хорошего программатора. Так как начинаю осваивать микроконтроллеры фирмы ATMEL, то досконально пришлось ознакомится с тем что предлагают производители. Предлагают они много всего интересного и вкусного, только совсем по заоблачным ценам. К примеру, платка с одним двадцатиногим микроконтроллером с парой резисторов и диодов в качестве обвязки, стоит как «самолет». Поэтому остро встал вопрос о самостоятельной сборке программатора. После долгого изучения наработок радиолюбителей со стажем, было решено собрать хорошо зарекомендовавший себя программатор USBASP, мозгом которого служит микроконтроллер Atmega8 (так же есть варианты прошивки под atmega88 и atmega48). Минимальная обвязка микроконтроллера позволяет собрать достаточно миниатюрный программатор, который всегда можно взять с собой, как флэшку.Автором данного программатора является немец Thomas Fichl, страничка его разработки со схемами, файлами печатных плат и драйверами.
Раз решено было собрать миниатюрный программатор, то перерисовал схему под микроконтроллер Atmega8 в корпусе TQFP32 (распиновка микроконтроллера отличается от распиновки в корпусе DIP):

Перемычка J1 применяется, в случае если необходимо прошить микроконтроллер с тактовой частотой ниже 1,5МГц. Кстати, эту перемычку вообще можно исключить, посадив 25 ногу МК на землю. Тогда программатор будет всегда работать на пониженной частоте. Лично для себя отметил, что программирование на пониженной скорости на доли секунды дольше, и поэтому теперь перемычку не дёргаю, а постоянно шью с ней.
Стабилитроны D1 и D2 служат для согласования уровней между программатором и USB шиной, без них работать будет, но далеко не на всех компьютерах.
Светодиод blue показывает наличие готовности к программированию схемы, red загорается во время программирования. Контакты для программирования выведены на разъем IDC-06, распиновка соответствует стандарту ATMEL для 6-ти пинового ISP разъема:
На этот разъем выведены контакты для питания программируемых устройств, здесь оно берется напрямую с USB порта компьютера, поэтому нужно быть внимательным и не допускать кз. Этот же разъем применяется и для программирования управляющего микроконтроллера, для этого достаточно соединить выводы Reset на разъеме и на мк (см. красный пунктир на схеме). В авторской схеме это делается джампером, но я не стал загромождать плату и убрал его. Для единичной прошивки хватит и простой проволочной перемычки. Плата получилась двухсторонняя, размерами 45х18 мм.
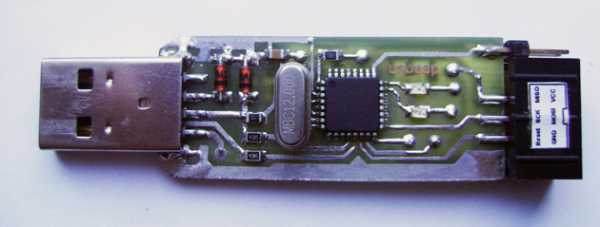
Разъем для программирования и перемычка для снижения скорости работы программатора вынесены на торец устройства, это очень удобно
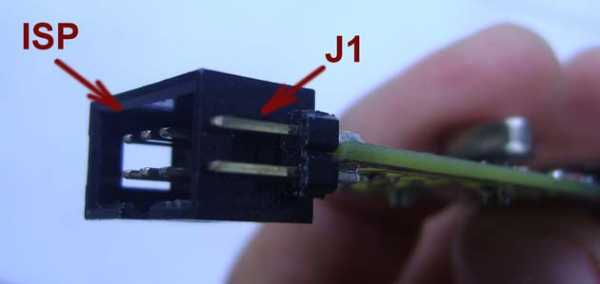
Прошивка управляющего микроконтроллера
Итак, после сборки устройства осталось самое важное — прошить управляющий микроконтроллер. Для этих целей хорошо подходят друзья у которых остались компьютеры с LPT портом 🙂 Простейший программатор на пяти проводках для AVR
Микроконтроллер можно прошивать с разъема программирования, соединив выводы Reset микроконтроллера (29 нога) и разъема. Прошивка существует для моделей Atmega48, Atmega8 и Atmega88. Желательно использовать один из двух последних камней, так как поддержка версии под Atmega48 прекращена и последняя версия прошивки датируется 2009 годом. А версии под 8-й и 88-й камни постоянно обновляются, и автор вроде как планирует добавить в функционал внутрисхемный отладчик. Прошивку берем на странице немца. Для заливки управляющей программы в микроконтроллер я использовал программу PonyProg. При программировании необходимо завести кристалл на работу от внешнего источника тактирования на 12 МГц. Скрин программы с настройками fuse перемычек в PonyProg:

После прошивки должен загореться светодиод подключенный к 23 ноге микроконтроллера. Это будет верный признак того, что программатор прошит удачно и готов к работе.
Установка драйвера
Установка велась на машину с системой Windows 7 и никаких проблем не возникло. При первом подключении к компьютеру выйдет сообщение об обнаружении нового устройства, с предложением установки драйвера. Выбираем установку из указанного места:

Выбираем папку где лежат дрова и жмем Далее

Мигом появится окно с предупреждением о том, что устанавливаемый драйвер не имеет цифровой подписи у мелкомягких:
Забиваем на предупреждение и продолжаем установку, после небольшой паузы появится окно, сообщающее об успешном окончании операции установки драйвера
Все, теперь программатор готов к работе.
Khazama AVR Programmer
Для работы c программатором я выбрал прошивальщик Khazama AVR Programmer. Замечательная программка, с минималистичным интерфейсом.
Она работает со всеми ходовыми микроконтроллерами AVR, позволяет прошивать flash и eeprom, смотреть содержимое памяти, стирать чип, а также менять конфигурацию фьюз-битов. В общем, вполне стандартный набор. Настройка фьюзов осуществляется выбором источника тактирования из выпадающего списка, таким образом, вероятность залочить кристалл по ошибке резко снижается. Фьюзы можно менять и расстановкой галок в нижнем поле, при этом нельзя расставить галки на несуществующую конфигурацию, и это тоже большой плюс в плане безопасности.

Запись фьюзов в память мк, как можно догадаться, осуществляется при нажатии кнопки Write All. Кнопка Save сохраняет текущую конфигурацию, а Load возвращает сохраненную. Правда я так и не смог придумать практического применения этих кнопок. Кнопка Default предназначена для записи стандартной конфигурации фьюзов, такой, с какой микроконтроллеры идут с завода (обычно это 1МГц от внутреннего RC).
В общем, за все время пользования этим программатором, он показал себя с наилучшей стороны в плане стабильности и скорости работы. Он без проблем заработал как на древнем стационарном пк так и на новом ноутбуке.
Скачать файл печатной платы в SprintLayout можно по этой ссылке

Ну вроде все, если возникнут вопросы, постараюсь ответить.
habr.com
