Пьезоэлектрические двигатели – Техническая информация о продукции – Поддержка – Евротек Дженерал
В связи с развитием нанотехнологий, возникла необходимость перемещать микро- и наноструктуры с точностью порядка нескольких нанометров и менее. В современном технологическом и исследовательском оборудовании широкое распространение получили пьезодвигатели. Пьезодвигателями называют устройства, в которых механическое перемещение достигается за счёт обратного пьезоэлектрического эффекта. Материалы, составляющие основу таких приводов, называют пьезоэлектриками. Обратный пьезоэлектрический эффект заключается в изменении линейных размеров пьезоэлектрика при приложении электрического поля.
В настоящий момент сфера применения пьезодвигателей охватывает многие отрасли: микроскопия, робототехника, фототехника, нанометрология, нанолитография, нанопечать, микродозирование и др. Пьезоприводы могут использоваться для вакуумного и криогенного оборудования.
Ниже рассматриваются устройство и технические характеристики различных типов пьезоэлектрических двигателей, разработанных компанией Physik Instrumente. Эти данные помогут Вам сделать оптимальный выбор модели пьезодвигателя для каждого конкретного приложения.
Шаговые пьезодвигатели
Принцип работы и особенности пьезоэлектрических двигателей серии NEXLINE
Пьезоприводы NEXLINE обладают следующими техническими особенностями:
- Высокое разрешение, которое ограничивается используемой электроникой для управления пьезодвигателем. В режиме работы без обратной связи величина минимального шага достигает значений <1 нм
- Высокая жёсткость, толкающее усилие до 600 Н, удерживающее усилие достигает 800 Н
- Меньшие габариты и масса по сравнению с электродвигателем
- В неподвижном состоянии пьезопривод сохраняет текущее положение с точностью в несколько нанометров, в том числе при выключенном питании.
- Пьезоприводы не создают магнитные поля и не подвержены их воздействию
- Активные компоненты пьезоприводов NEXLINE изготовлены из вакуумно-совместимой пьезокерамики
- Возможность работы в условиях жёсткого УФ излучения
- Устойчивость к перегрузкам в несколько g
- Пригодны к использованию в чистых помещения
Принципиальная схема пьезопривода NEXLINE показана на рис.1. Привод состоит из одного или нескольких активных модулей, перемещающих направляющую. Чем больше таких модулей, тем выше развиваемое толкающее усилие.
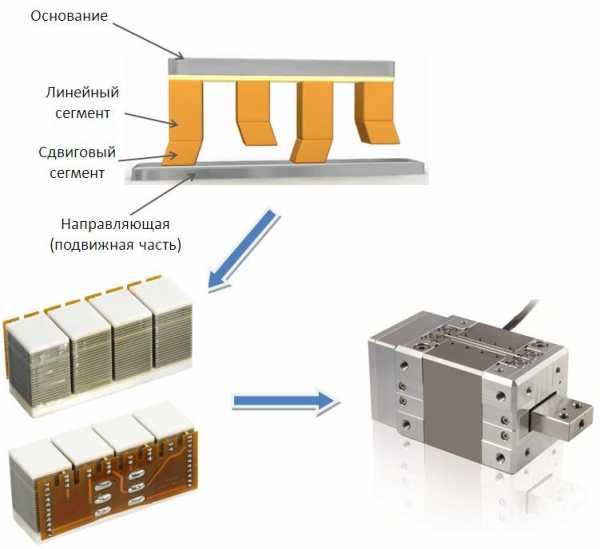
Рис.1 Принципиальная схема пьезоэлектрического двигателя серии NEXLINE (вверху), собранный активный модуль пьезодвигателя (слева), линейный пьезоактуатор (справа).
В активном модуле используются два типа пьезоэлементов: линейный и сдвиговый (рис. 1). Линейные пьезоэлементы закрепляются на основании, на которое действует сила преднагрузки. Сдвиговые пьезоэлементы контактируют с подвижной частью, перемещая её в двух направлениях. Таким образом, пьезодвигатели NEXLINE позволяют осуществлять перемещения на большие расстояния с высокой точностью. Схема перемещения изображена на рис.2
Рис.2 Схема перемещения пьезодвигателя NEXLINE. Стрелками показано направление деформации каждого из сегментов активного модуля
Величина шага пьезодвигателя зависит от величины нагрузки, а также от направления движения. Эффект гистерезиса, заключающийся в неоднозначности изменения размеров пьезокерамических элементов от направления изменения электрического поля, не позволяет приводу перемещаться с равными шагами. Для компенсации нелинейности и достижения высокой повторяемости перемещения требуется датчик положения.
Существуют три режима работы пьезодвигателя. Ниже представлена таблица, где отмечены основные особенности каждого из них.
| Режим полного шага | Наношаговый режим | Непрерывный режим |
Перемещение на длинные дистанции | Перемещение на длинные дистанции | Высокодинамичное позиционирование в диапазоне нескольких микрон |
Максимальная статическая и динамическая жёсткость | Перемещение с самой низкой величиной вибрации | Величина минимального шага в режиме без обратной связи до одного пикометра |
Максимальное блокирующее усилие при выключенном питании | Наиболее равномерное* перемещение | — |
Максимальная скорость | Максимальная скорость составляет 60% от скорости в режиме полного шага | — |
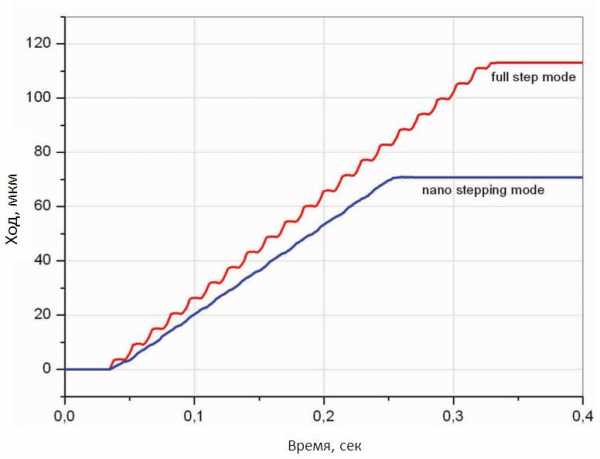
*Рис.3 Зависимость движения актуатора с пьезодвигателем NEXLINE от времени для шагового и наношагового режимов.
Рассмотрим более подробно режимы работы пьезодвигателя NEXLINE.
Режим полного шага
В режиме полного шага существует временной сдвиг между прижимной и сдвиговой фазами, что ведёт к неравномерности движения. На графике ниже показана зависимость приложенного напряжения (для линейного и сдвигового перемещения) от времени и соответствующее изменение координаты направляющей за один цикл работы.
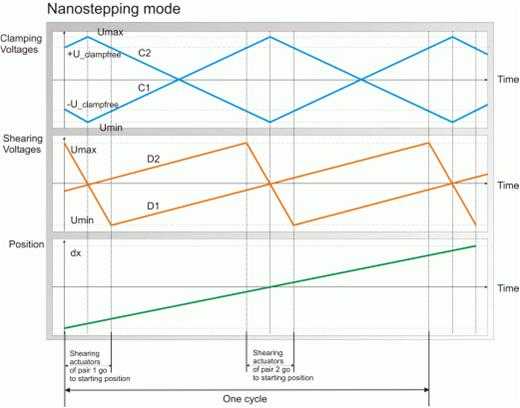
Рис.4 Изменение координаты подвижной части пьезопривода в зависимости от компонент управляющего напряжения в режиме полного шага
Согласно рис.4 видно, что привод не перемещается в течение периода, когда пьезоактуатор осуществляет линейное движение к направляющей. Движение «ног» двигателя осуществляется попарно. Ход сдвигового пьезоактуатора определяет шаг позиционирования. Стоит отметить, что напряжение, подаваемое на линейный сегмент, всегда максимально в режиме полного шага, вследствие чего развиваемое усилие пьезодвигателя в данном режиме максимально. В режиме без обратной связи пользователь может задавать величину шага и его частоту (время одного цикла), что влияет на развиваемое усилие и скорость перемещения привода. Максимальная рекомендуемая частота шага – 100 Гц для продолжительного использования. Возможно повышение частоты, однако на короткие промежутки времени. Величина шага может варьироваться от нескольких нанометров до нескольких микрон. В режиме с обратной связью пользователь задаёт скорость перемещения в заданную координату (рекомендуемая скорость – 250 мкм/сек), после чего оптимизация величины шага определяется автоматически контроллером. После достижения указанной координаты пьезодвигатель переходит в режим ожидания, т.е. все величины компонент напряжения достигают нуля, ноги пьезодвигателя находятся в контакте с направляющей. В зависимости от параметров, внешних условий и конкретного приложения при переходе в режим ожидания возможно отклонение в 10 нм от достигнутой координаты. Время при переходе в режим ожидания не превышает 2 сек.
Наношаговый режим
В наношаговом режиме все пьезоэлементы движутся одновременно и находятся в контакте с подвижной частью. В результате актуатор движется равномерно. Ввиду того, что диапазон перемещения сдвиговых пьезоактуаторов не достигает максимальных значений, величина шага и толкающее усилие становится меньше, чем в режиме полного шага
Аналоговый режим
В аналоговом режиме все ноги пьезодвигателя находятся в контакте с направляющей, при этом деформируется только сдвиговые пьезоактуаторы. Диапазон их смещения определяет величину шага. Максимальное значение величины шага в данном режиме составляет несколько микрон. Минимальный шаг ограничен только шумом усилителя. Переход к аналоговому режиму осуществляется через стадию, когда пьезодвигатель находится в режиме ожидания.
Пьезодвигатели NEXLINE чувствительны к перегреву. Продолжительное позиционирование на предельных скоростях может привести к нагреву активного модуля и к снижению срока службы.
Принцип работы и особенности пьезоэлектрических двигателей серии NEXACT®
Отдельный модуль пьезодвигателя серии NEXACT® состоит из основания, двух пар изгибающихся элементов («ног») и подвижной части («направляющей»), на которую действует сила преднагрузки. Каждая пара ног работает синхронно и состоит из двух пьезопакетов. Вследствие обратного пьезоэффекта пьезопакеты удлиняются/сокращаются и изгибаются, что позволяет перемещать направляющую (рис.6).
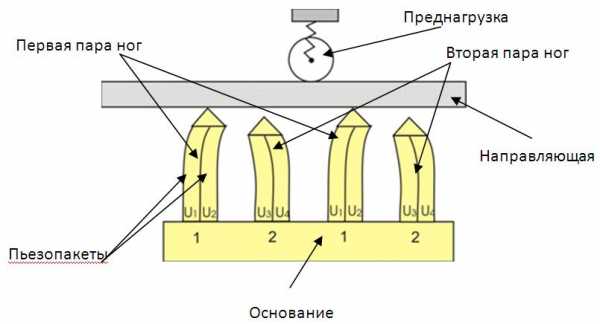
Рис.6 Принципиальная схема работы пьезодвигателей серии NEXACT®
Существует два режима работы пьезодвигателя NEXACT®: непрерывный и шаговый (рис.7). В непрерывном режиме все ноги пьезодвигателя прижаты к направляющей. В данной конфигурации направляющая перемещается с высокой скоростью, однако диапазон перемещения составляет несколько микрон, что связано с ограничением величины изгиба пьезопакета. В шаговом режиме первая и вторая пары ног пьезодвигателя работают попеременно. Диапазон перемещения ограничен только длиной направляющей.
Рис.7 Схема работы пьезодвигателя NEXACT® в непрерывном (слева) и шаговом (справа) режимах
Один цикл работы пьезодвигателя NEXACT® в шаговом режиме состоит из нескольких стадий.
На первой стадии первая пара ног прижимается к направляющей, вторая пара ног отрывается от направляющей (рис.8). На графике по оси абсцисс отмечена величина напряжения, отвечающая за изгиб ноги (Utransport) для перемещения направляющей. Данная величина является разностью между напряжениями, подаваемыми на пьезопакеты (U1-U2 для первой пары ног; U3-U4 для второй пары ног). За счёт разности напряжений между склеенными пьезопакетами происходит их изгиб. По оси ординат отмечена величина напряжения, отвечающая за прижимание пьезопакетов к направляющей (Uclamp), т.е. за их линейное движение перпендикулярно направляющей. Величина Uclamp соответствует половине от суммы напряжений, подаваемых на пьезопакеты (U1+U2

Рис. 8. Шаговый режим работы пьезодвигателя NEXACT®, стадия 1
На второй стадии первая пара ног изгибается вправо, соответствующей точкой отмечен момент, когда первая пара ног протолкнула направляющую и готова от неё оторваться. В это время вторая пара ног изгибается влево (рис.9) и затем контактирует с направляющей, чтобы продолжить её движение
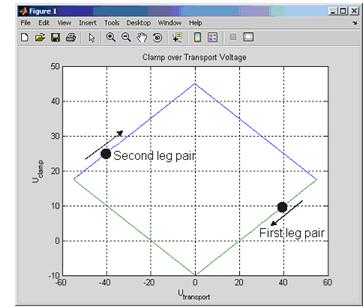
Рис. 9. Шаговый режим работы пьезодвигателя NEXACT®, стадия 2
На третьей стадии первая пара ног изгибается влево и контактирует с направляющей для её дальнейшего перемещения, в то время как вторая пара ног, напротив, завершает продвижение направляющей и готова от неё оторваться
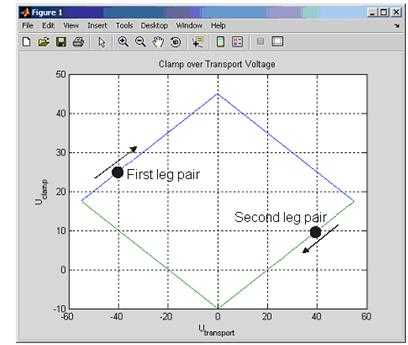
Рис. 10. Шаговый режим работы пьезодвигателя NEXACT®, стадия 3
Четвёртая стадия является эквивалентом первой стадии. Стоит отметить, что пьезодвигатель NEXACT® обладает функцией самоблокировки (self locking), в этом случае все ноги прижаты к направляющей, величина Uclampмаксимальна, Utransport – минимальна.
В непрерывном режиме Utransport для всех ног одинаково, её величина варьируется в зависимости от требуемого диапазона перемещения, величина Uclamp подстраивается контроллером автоматически.
В шаговом режиме величина шага определяется Utransport, количество шагов в сек. и величина шага определяет скорость перемещения направляющей.
Исходя из особенностей конструкции приводов серии NEXACT®, увеличение скорости движения ведёт к снижению толкающего усилия в направлении перемещения. Соответствующая зависимость приведена ниже (рис.11)
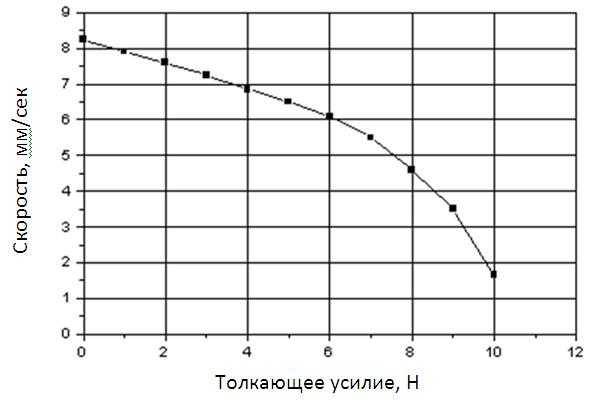
Рис. 11. Зависимость толкающего усилия пьезодвигателя NEXACT® и его скорости перемещения
Сравнительный анализ шаговых пьезодвигателей Nexact и Nexline
Характеристика/ Тип пьезодвигателя | Nexline® | Nexact® |
Область применения | Позиционирование, высокие нагрузки, диапазон перемещения до нескольких миллиметров | Позиционирование, средние нагрузки, диапазон перемещения до нескольких сантиметров |
Тип двигателя | Шаговый пьезодвигатель серии PiezoWalk® | Шаговый пьезодвигатель серии PiezoWalk® |
Принцип работы | Перемещение направляющей с помощью линейных и сдвиговых пьезоактуаторов | Перемещение направляющей с помощью изгибающихся пьезоактуаторов |
Скорость | От нескольких нм/сек до 2 мм/сек | От нескольких нм/сек до 20 мм/сек |
Толкающее усилие | До 600 Н | До 10 Н |
Удерживающее усилие при выключенном питании | До 800 Н | До 15 Н |
Величина минимального шага в режиме без обратной связи | 0.03 нм | 0.03 нм |
Диапазон управляющего напряжения | От -250 до 250 | От 0 до 45 В |
Диапазон перемещения | Зависит от длины направляющей | Зависит от длины направляющей |
Габариты | Небольшие | Высокая компактность |
Вакуумная совместимость | Да, используются соответствующие приложению материал корпуса, датчик, кабели и т.п. | Да, используются соответствующие приложению материал корпуса, датчик, кабели и т.п. |
Температура дегазации | До 110 °С | До 110 °С |
Работа в условиях чистой комнаты | да | да |
Немагнитный корпус | Да, по запросу | Да, по запросу |
Устойчивость к радиационному излучению (УФ, рентген) | да | да |
Приложения, чувствительные к изменению температуры | Пьезодвигатели работают без выделения тепла в статическом и квазистатическом режимах | Пьезодвигатели работают без выделения тепла в статическом и квазистатическом режимах |
OEM исполнение | да | да |
Позиционирование в вертикальном положении | да | да |
Линейная платформа на основе пьезодвигателя | По запросу | доступна |
Контроллер | Настольный цифровой контроллер или модульная система в 19 дюймовой стойке | OEM исполнение, настольный цифровой контроллер или модульная система в 19 дюймовой стойке |
Информация о патентах | № 10148267B4 (Германия) № 6,800,984B2 (США) | №4408618B4 (Германия) |
Пьезодвигатель PICMAWalk
Пьезодвигатель PICMAWalk состоит из 8 пьезоактуаторов, которые образуют 4 пары элементов V-образной формы. Четыре элемента перемещают подвижную направляющую благодаря последовательному алгоритму линейных и сдвиговых деформаций (см. видео). Данный пьезодвигатель позволяет развивать толкающее/тянущее усилие до 50 Н, удерживающее усилие – до 60 Н, скорость – до 15 мм/сек. Рабочее напряжение пьезоактуаторов серии PICMA, входящих в состав пьезодвигателя PICMAWalk, соответствует диапазону от -20 В до 120 В.
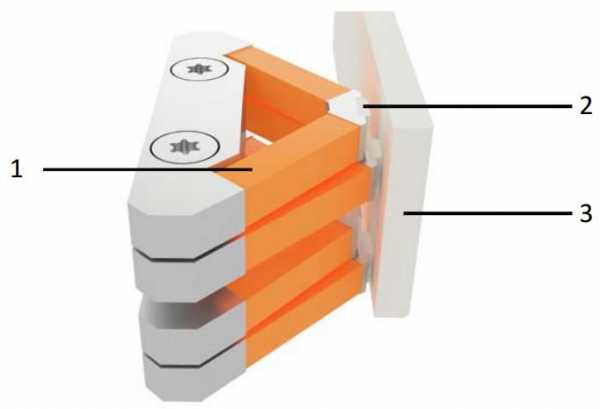
Рис.1 Принципиальная схема пьезодвигателя PICMAWalk. 1 — пьезоактуатор, 2 — контактная площадка, 3 – подвижная направляющая
Пьезодвигатель PICMAWalk расширил линейку уже широко использующихся пьезодвигателей – Nexact и Nexline. Сравнительная информация по трём типам пьезодвигателей в отношении скорости (ось абсцисс) и развиваемого усилия (ось ординат) приведена на схеме ниже.

Рис.2 Сравнительная схема трёх типов пьезодвигателей, разработанных компанией Physik Instrumente – PICMAWalk, Nexact и Nexline.
Пьезодвигатель PICMAWalk обладает следующими отличительными особенностями:
- Диапазон перемещения зависит от длины направляющей
- Высокое разрешение (порядка 0.03 нм в режиме без обратной связи)
- Самоблокировка при отключении питания, отсутствие тепловыделения
- Немагнитный и вакуумносовместимый принцип работы
- Уровни интеграции от OEM двигателя до многоосевых систем позиционирования
Пьезодвигатель PICMAWalk обладает отличными динамическими и точностными характеристиками. Ниже приведены графики перемещения привода N-331 на основе данного двигателя в зависимости от времени. Измерения проведены с помощью интерферометра. На рис.3 видно, что привод переместился на 100 нм за 100 мс. На рис.4 показан график движения актуатора с шагом 10 нм.

Рис.3 График перемещения актуатора N-331 на базе пьезодвигателя PICMAWalk на 100 нм, аналоговый режим
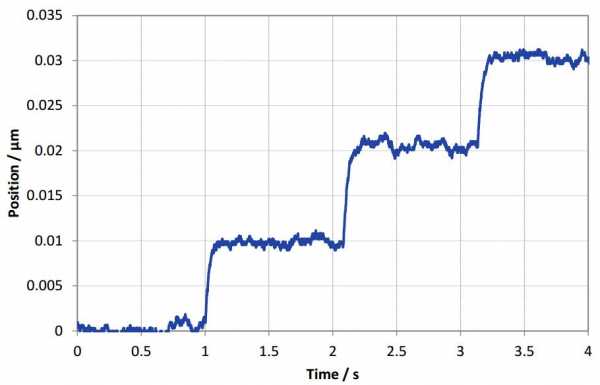
Рис.4 График перемещения актуатора N-331 на базе пьезодвигателя PICMAWalk c шагом 10 нм, аналоговый режим.
В ходе тестовых экспериментов были проведены исследования износостойкости пьезодвигателя PICMAWalk при атмосферных условиях. Для этого на актуатор N-331 закрепили нагрузку в 2 кг и проводили перемещения с определённым шагом вдоль и против направления действия силы тяжести, создаваемой нагрузкой (рис.5).
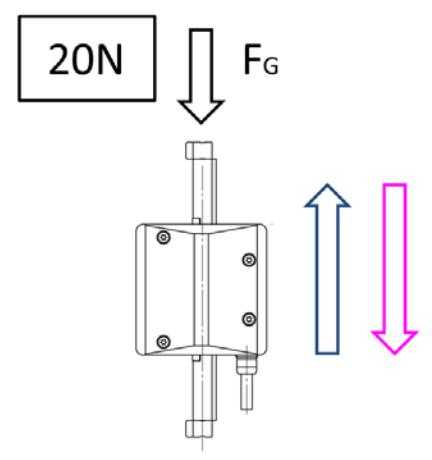
Рис.5 Схема воздействия нагрузки на актуатор. Черной стрелкой указано напраление действия силы тяжести, создаваемой нагрузкой. Цветными стрелками показаны направления движения пьезоактуатора N-331.
Ниже приведены результаты исследований в режиме полного шага и наношагового режима при общем перемещении более 100 км. Нижняя кривая соответствует ситуации, когда направление движения пьезоактуатора противоположно направлению действия силы тяжести нагрузки. Верхняя кривая – направление силы тяжести совпадает с направлением движения пьезоактуатора. Из графиков видно, что колебания величины шага незначительны на протяжении всего эксперимента, что позволяет достичь высокой плавности перемещения. Разница в величине шага для верхней и нижней кривых обусловлена изменением направления перемещения пьезоактуатора.

Рис.6 Зависимость величины шага (мкм) от пройденной дистанции (км) для режима полного шага.

Рис.7 Зависимость величины шага (мкм) от пройденной дистанции (км) для наношагового режима.
В силу конструкции для двигателя PICMAWalk характерно изменение величины шага с ростом усилия, приложенного вдоль подвижной направляющей. На рис.8 и 9 показаны соответствующие зависимости. Видно, что для случая, когда направление перемещения пьезоактуатора противоположно направлению силы тяжести нагрузки, при усилиях более 60 Н величина шага резко уменьшается. Когда направление силы тяжести и перемещения совпадают, наблюдается небольшой рост величины шага.

Рис.8 Зависимость величины шага от прикладываемого усилия для наношагового режима. Направления движения пьезоактуатора и силы тяжести противоположны друг другу
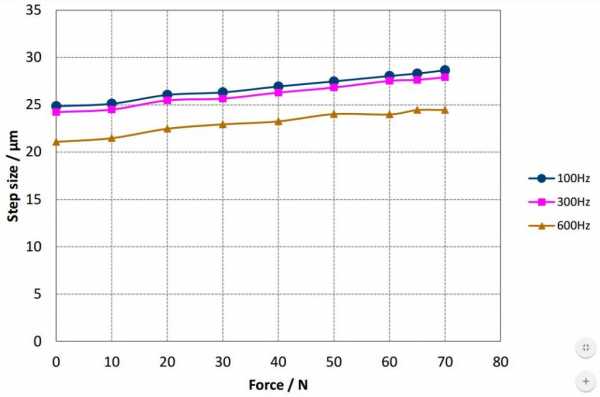
Рис.9 Зависимость величины шага от прикладываемого усилия для наношагового режима. Направления движения пьезоактуатора и силы тяжести совпадают
Ультразвуковые пьезоэлектрические двигатели
Принцип работы и особенности пьезоэлектрических двигателей серии PILine
Пьезоприводы PILine обладают следующими техническими особенностями:
- Высокая скорость перемещения – до 500 мм/сек
- Компактность
- Самоблокировка при отключении питания, отсутствие выделения тепла в режиме ожидания
- Отсутствие передаточных механизмов и необходимости в обслуживании
- Немагнитный и вакуумно-совместимый принцип работы
- Отсутствие принципиального ограничения по диапазону перемещения
- Удерживающее усилие до 15 Н, момент до 0.3 Н*м
- Минимальный шаг в режиме без обратной связи до 50 нм
Принципиальная схема пьезодвигателей линейного и углового типа показана на рис. 12
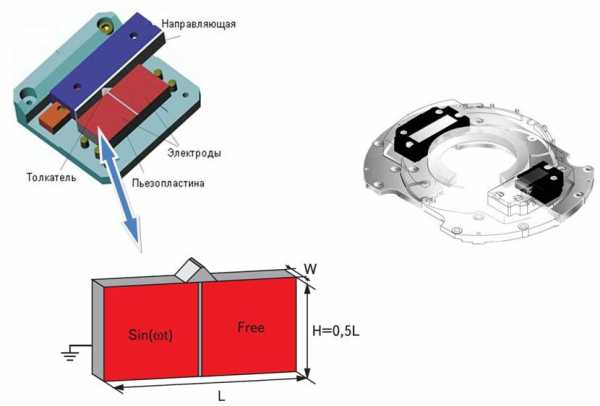
Рис. 12. Принципиальная схема линейного (слева) и углового (справа) пьезодвигателей серии PILine.
Основной частью линейного ультразвукового двигателя является пьезокерамическая пластина, поляризованная вдоль направления W (рис.12). На одну сторону пластины нанесены два положительных электрода, другая сторона заземлена. При движении влево или вправо на соответствующий электрод подается управляющий синусоидальный сигнал высокой частоты (в диапазоне от 100 до 200 кГц). Под действием приложенного напряжения, пьезокерамическая пластина деформируется (рис.13), заставляя перемещаться прикрепленный к ней толкатель, изготовленный из оксида алюминия. Вблизи толкателя размещена направляющая. Соприкосновение толкателя с направляющей приводит в движение платформу.
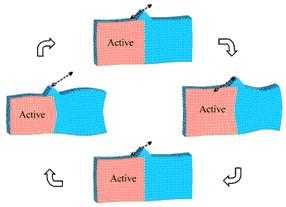
Рис. 13 Схема деформации пьезопластины при приложении синусоидального напряжения. Показан один цикл колебания пьезопластины.
На рис.12 справа изображена принципиальная схема вращающегося механизма, основанного на двух линейных пьезоприводах.
В более компактных вращающихся пьезоплатформах основной частью двигателя является полый пьезоцилиндр. Направление поляризации пьезоцилиндра перпендикулярно его боковой поверхности. На его внешнюю боковую поверхность нанесены активные электроды, разделённые небольшим зазором. Между электродами сверху на основании приклеены толкатели. Внутренняя сторона заземлена. При подаче синусоидального напряжения на активные электроды (через один) происходит деформация пьезоцилиндра, вследствие чего толкатели перемещают ротор (рис.14).
Рис. 14. Принципиальная схема миниатюрного углового пьезодвигателя PILine
Пьезодвигатели PILine являются достаточно надёжными приводами. В зависимости от условий эксплуатации, среднее время работы на отказ составляет примерно 20000 часов или 2000 км. На рис. 15 показана зависимость максимального времени бесперебойной работы, выраженное в процентах, от температуры, при максимальной величине управляющего сигнала. Из графика видно, что при температурах выше 20 °С возникает повышенный износ в связи с увеличением трения толкателя о направляющую.
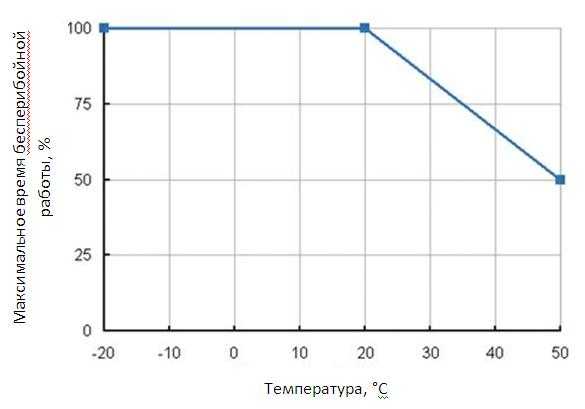
Рис. 15 Зависимость максимального времени бесперебойной работы от температуры для пьезодвигателей серии PiLine
На рис.16 изображён график зависимости скорости пьезодвигателя от величины развиваемого усилия в направлении перемещения при различных величинах управляющего сигнала.
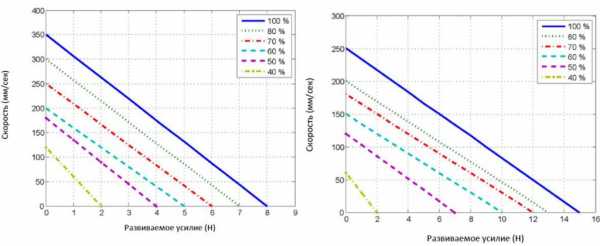
Рис. 16 Соотношение скорости и силы, развиваемой пьезодвигателем при различных амплитудах управляющего сигнала (40÷100%) для моделей U-264.10/20/30 (слева) и U-264.11/21/31 (справа)
Пьезодвигатели PiLine идеально подходят для приложений, где требуется высокая динамика перемещения. Они способны развивать ускорение в несколько g, а время установки в заданную координату составляет порядка 10 мксек (рис.17).
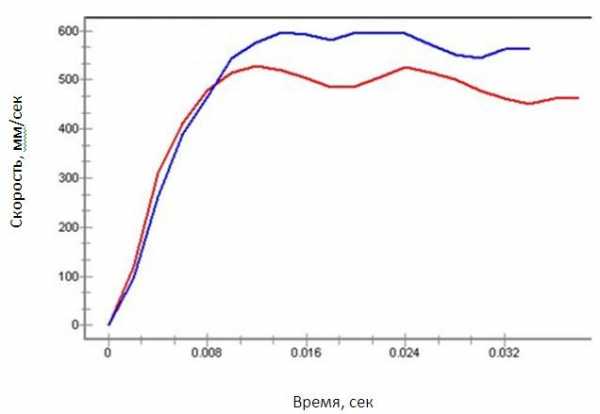
Рис. 17. Время разгона пьезодвигателя серии PILine до максимальной скорости в разных направлениях.
Пьзоэлектрические инерционные двигатели серии PIShift
Приводы PiShift имеют следующий ряд особенностей:
- Отсутствие принципиального ограничения по диапазону перемещения
- Самоблокировка при отключении питания, отсутствие выделения тепла в режиме ожидания
- Минимум шума при перемещении
- Удерживающее усилие до 10 Н, максимальная скорость более 5 мм/сек
- Простота системы управления
- Низкая стоимость
Пьезодвигатели серии PIShift основаны на эффекте прерывистого движения (stick-slip effect). Основа привода – пьезоактуатор, к одной стороне которого прикреплён преднагруженный фрикционный элемент. На пьезоактуатор подаётся пилообразный сигнал с контроллера. В процессе нарастания напряжения импульса пьезоэлемент медленно «растягивается» и перемещает направляющую, т.к. толкающее усилие не превышает статической силы трения между направляющей и фрикционным элементом. При резком спаде напряжения происходит быстрое «укорачивание» пьезоактуатора, при этом направляющая остаётся на своём месте, т.к. усилие, развиваемое пьезоэлементом, превышает кинетическое трение, что приводит к проскальзыванию (рис.18). Сравнение толкающей силы с силой кинетического трения обусловлено тем, что в момент начала спада напряжения направляющая продолжает движение по инерции.

Рис. 18. Схема движения инерционного пьезодвигателя серии PIShift.
Конструкция пьезопривода накладывает ограничения на области возможного применения. Не допускается подвергать направляющую воздействию боковых сил. Пьезоэлектрический двигатель серии PIShift не предназначен для работы в режиме 24/7. Максимальное время непрерывной работы не должно превышать 10 с, после которого привод должен находиться в покое как минимум такой же промежуток времени. При соблюдении этих условий и эксплуатации при комнатной температуре и нормальном атмосферном давлении, срок службы пьезопривода позволяет пройти дистанцию до 2000 м.
Сравнительная таблица технических характеристик пьезодвигателей
Параметр/Тип двигателя | Шаговый пьезодвигатель (Nexline, Nexact) | Ультразвуковой пьезодвигатель (PI Line) | Инерционный пьезодвигатель (PI Shift) |
Разрешение | <1 нм | <1 мкм | <1 нм |
Скорость | <10 мм/сек | <250 мм/сек; <1080 °/сек | <10 мм/сек |
Диапазон перемещения | Ограничен только длиной направляющей | Ограничен только длиной направляющей | Ограничен только длиной направляющей |
Развиваемое усилие | <800 Н | <40 Н | <10 Н |
Диапазон управляющего напряжения | 55 В (Nexact) 500 В (Nexline) | 120 В, 200 В | <48 В |
Особенности | · Позиционирование с нанометровым разрешением · Высокое толкающее/удерживающее усилие · Перемещение в миллиметровом диапазоне · Возможность грубой/точной подстройки за счёт различных режимов работы · Возможность использовать в качестве активной виброизоляции · Позиционирование с постоянной, низкой скоростью | · Позиционирование с микрометровым разрешением · Высокая скорость для задач сканирования, быстрая установка в указанную координату · Возможность позиционирования с постоянной, низкой скоростью | · Позиционирование с нанометровым разрешением · Низкий уровень шума при перемещении · Простота управления |
www.eurotek-general.ru
Пьезопривод
Изобретение относится к области электромеханики и может быть использовано для привода различных устройств в прецизионном приборостроении, при медико-биологических исследованиях и в системах нано-технологии. Технический результат: расширение диапазона перемещений, повышение точности. Сущность: пьезопривод содержит Т-образное рабочее перемещаемое звено, линейные пьезоэлектрические элементы, Т-образную опору. Перемещаемое звено и опора расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу. Стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент. Боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена. На перемещаемом рабочем звене установлен второй пьезоэлектрический элемент. 2 ил.
Изобретение относится к области электромеханики и может быть использовано для привода различных устройств в прецизионном приборостроении, при медико-биологических исследованиях и в системах нано-технологий.
Известен механизм перемещений (RU, патент, 2115995, кл. H 01 L 41/08), содержащий пьезоэлектрический элемент с размещенными на нем электродами, подвижный и соединительный элементы, опору, относительно которой одним концом зафиксирован соединительный элемент, другим концом жестко скрепленный с концом подвижного элемента, установленного с возможностью углового поворота. Пьезоэлектрический элемент выполнен преимущественно цилиндрической формы с радиальной поляризацией и незамкнуто охвачен по периметру нерастяжимым соединительным элементом, подвижный элемент выполнен в виде жесткого стержня, поворачивающийся конец которого тягой, направленной под углом к стержню, связан также с соединительным элементом.
Недостатками устройства-аналога является механическая непрочность конструкции, связанная с механическими напряжениями, возникающими при деформации пьезоэлемента между ним и соединительным элементом.
Наиболее близким по технической сущности к заявляемому устройству является позиционирующее устройство (RU, патент, 2080631, кл. H 01 L 41/08), выполненное в виде монолитной симметричной Н-образной стержневой конструкции, состоящей из стержней с упругими цилиндрическими шарнирами на концах и в середине стержней. Боковые стержни ортогональны центральному стержню и жестко соединены с корпусом устройства через линейные пьезоэлектрические элементы. В середине центрального стержня закреплено звено, несущее рабочий орган.
Недостатками устройства-прототипа являются большие габариты и малые, совершаемые устройством относительные перемещения, и, как следствие, низкая эффективность устройства, а также невысокая точность.
Задачей данного изобретения является создание миниатюрного устройства, которое сможет совершать большие относительные перемещения с высокой точностью.
Патентуется пьезопривод, содержащий рабочее перемещаемое звено, симметричную стержневую конструкцию, линейные пьезоэлектрические элементы, отличающийся тем, что он снабжен Т-образной опорой, и рабочее перемещаемое звено выполнено также Т-образным, причем они расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу, кроме того, стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент, при этом на перемещаемом рабочем звене также установлен пьезоэлектрический элемент, боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена соответственно.
На фиг.1 показана конструкция пьезопривода.
На фиг.2 представлена принципиальная кинематическая схема стержневой конструкции.
Пьезопривод содержит пьезоэлектрический элемент 1, с помощью которого осуществляются перемещения, стержневую конструкцию 2, перемещаемое рабочее звено 3, пьезоэлектрический элемент 4, установленный на перемещаемом рабочем звене, который компенсирует погрешности перемещений, связанные с люфтами в месте подвижных контактов, опору 5.
Устройство работает следующим образом.
При подаче на пьезоэлектрический элемент, находящийся между трапецеидальными элементами стержневой конструкции 2, управляющего напряжения он изменяет свои линейные размеры. При этом трапецеидальные элементы стержневой конструкции 2 начинают либо сближаться, либо отдаляться друг от друга в зависимости от полярности поданного на пьезоэлектрический элемент 1 управляющего напряжения. Вследствие этого, рабочее перемещаемое звено 3 движется по боковым сторонам трапеций вверх или вниз относительно Т-образной опоры соответственно.
Заявляемая конструкция пьезопривода обеспечивает повышение точности перемещений за счет компенсации погрешностей пьезоэлектрическим элементом 4 и расширение диапазона относительных перемещений.
Пьезопривод, содержащий рабочее перемещаемое звено, симметричную стержневую конструкцию, линейные пьезоэлектрические элементы, отличающийся тем, что он снабжен Т-образной опорой и рабочее перемещаемое звено выполнено также Т-образным, причем они расположены таким образом, что их горизонтальные элементы обращены навстречу друг другу, кроме того, стержневая конструкция выполнена в виде двух равнобедренных трапеций, которые соединены между собой в центрах малых оснований трапеций через пьезоэлектрический элемент, при этом на перемещаемом рабочем звене также установлен пьезоэлектрический элемент, боковые стороны трапеций установлены с возможностью перемещения в кольцевых держателях, жестко закрепленных на концах горизонтальных элементов Т-образной опоры и Т-образного рабочего перемещаемого звена соответственно.
findpatent.ru
Пьезопривод
Изобретение относится к нефтяной промышленности, а именно к техническим средствам отбора глубинных проб жидкостей.
Для отбора глубинных проб жидкостей из скважин применяются различные глубинные пробоотборники, в частности спускаемые на забой скважины с помощью канатной техники автономные глубинные пробоотборники с пьезоприводом. Пьезопривод представляет собой гидравлическое реле времени, приводимое в действие давлением жидкости и газа в скважине.
Известно дифференциальное масляное реле времени, содержащее рабочую и приемную камеры с поршнями, разделитель с клапаном и гидросопротивлением, а также головкой с размещенным в ней клапаном, выполненным в виде цилиндрического поршня с выточкой (1).
Наиболее близким к патентуемому техническому решению является пьезопривод (2), содержащий две одинаковых по размерам цилиндрические камеры, заполненные маслом, отделенные одна от другой поперечной перегородкой с дросселирующим отверстием. В каждой камере находятся поршни с силовыми штоками, имеющими возможность соединения с клапанным или иным устройством глубинного прибора, а также размещенные по обе стороны от перегородки дополнительные поршни с капиллярными каналами, выполняющими роль гидросопротивления.
Недостатком известного пьезопривода является необходимость для регулирования времени срабатывания замены поршней с встроенными в них не регулируемыми гидросопротивлениями, что связано с разборкой узла пьезопривода и связанной с этим потерей части масла, также с опасностью засорения при разборке в полевых условиях, что, в свою очередь, снижает надежность срабатывания пьезопривода.
Задачей патентуемого изобретения является повышение надежности срабатывания пьезопривода.
Технический результат заключается в обеспечении возможности изменять при прочих равных условиях время перемещения поршня пьезопривода без его разборки и извлечения встроенного гидросопротивления.
Указанные задача и технический результат достигаются пьезоприводом, включающим замкнутую масляную камеру, в которой находится разделяющий камеру на две части поршень с капиллярным каналом, выполняющим роль гидросопротивления, а также два силовых штока и балластную камеру, и который выполнен с возможностью регулирования проходного сечения капиллярного канала без разборки пьезопривода.
В пьезоприводе для этого силовые штоки оппозитно прикреплены к поршню с капиллярным каналом, а их свободные концы выведены за пределы масляной камеры и один из этих концов расположен в балластной камере, при этом один из силовых штоков состоит из втулки с ввинченным в нее фиксирующимся в рабочем положении штоком, конец которого, расположенный внутри указанной втулки, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала при вращении штока, а другой конец этого штока образует свободный конец силового штока.
При вращении свободного конца штока, выступающего из масляной камеры, его конец, находящийся внутри втулки, выполненный в виде иглы, изменяет проходное сечение капиллярного канала в поршне (гидросопротивления), что позволяет регулировать время перемещения поршня без разборки узла пьезопривода.
На фиг. 1 изображен общий вид пьезопривода, присоединенного к клапанному узлу глубинного пробоотборника.
Пьезопривод состоит из замкнутой масляной камеры 1 с уплотнительными кольцами 2 и 3, поршня 4 с капиллярным каналом 5 и уплотнительными кольцами 6, силового штока 7, силового штока 8 с уплотнительным кольцом 9, втулки 10 с контргайкой 11, балластной камеры 12. Клапанный узел пробоотборника состоит из корпуса 13 с клапаном 14, возвратной пружиной 15 и с приемными отверстиями 16. К корпусу 13 присоединен корпус приемной камеры 17 с разделительным поршнем 18.
Пьезопривод представляет собой отдельный узел, одной стороной присоединяемый к клапанному узлу глубинного пробоотборника и взаимодействующий с ним при помощи силовых штоков 7 или 8. Пьезопривод имеет масляную камеру 1, заполненную рабочей жидкостью (маслом), внутри которой находится разделяющий камеру на две части поршень 4 с уплотнительными кольцами 6. Внутри поршня 4 выполнен капиллярный канал 5. К торцу поршня 4 присоединен с помощью резьбы силовой шток 7. К противоположному торцу поршня 4 оппозитно присоединена втулка 10, в которую ввинчивается на резьбе с возможностью фиксации в рабочем положении силовой шток 8 с уплотнительным кольцом 9. Конец силового штока 8, находящийся внутри втулки 10, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала 5 при вращении штока 8. На силовом штоке 8 имеется контргайка 9, фиксирующая его в рабочем положении при определенном перекрытии капиллярного канала указанной иглой. Для уплотнения силовых штоков 7 и 8 в корпусе камеры 1 имеются уплотнительные кольца 2 и 3.
Работа устройства осуществляется следующим образом.
При воздействии скважинного давления через приемные отверстия 16 на втулку 10 силовой шток 8 с втулкой 10 и поршень 4 с силовым штоком 7 перемещаются до крайнего положения, при этом втулка 10 с силовым штоком 8 погружается в камеру 1 через отверстие с уплотнительным кольцом 2, а силовой шток 7 выдвигается из нее через отверстие с уплотнительным кольцом 3. При движении поршня 4 жидкость, находящаяся в камере 1, перетекает из одной части камеры 1 в другую через капиллярный канал 5. При одинаковых термобарических условиях скорость перемещения поршня 4 зависит от того, насколько игла на конце силового штока 8, находящаяся внутри втулки 10, перекрывает капиллярный канал 5 в поршне 4. Силовой шток 8, перемещаясь вместе с поршнем 4, выходит из полости в корпусе клапанного узла 13, сообщая приемные отверстия 16 с приемной камерой 17, а силовой шток 7 выдвигается в балластную камеру 12.
Скорость движения поршня 4 зависит от степени перекрытия иглой капиллярного канала 5 в поршне 4, то есть от величины гидросопротивления, и регулируется углом поворота штока 8 относительно втулки 10. После установки величины гидросопротивления и, следовательно, времени до открытия приемных отверстий пробоотборника в данных термобарических условиях угол поворота штока фиксируется с помощью контргайки 11. После отбора глубинной пробы и извлечения пробоотборника из скважины пьезопривод отсоединяется от клапанного узла пробоотборника и от балластной камеры 12. При этом открывается доступ к силовым штокам 7 и 8 и в случае необходимости можно увеличить или уменьшить время срабатывания пьезопривода, изменив угол поворота штока 8. Таким образом, обеспечивается возможность задавать время срабатывания глубинного пробоотборника непосредственно на скважине без разборки узла пьезопривода для замены гидросопротивления.
Для повторного использования пьезопривода достаточно, перевернув камеру 1 на 180 градусов, присоединить ее к корпусу клапанного узла 13, при этом выдвинутый силовой шток 7 перекроет доступ скважинной жидкости в приемную камеру 17. К камере 1 привинчивается балластная камера 12, после чего пьезопривод готов к использованию.
Литература:
1. А.Г. Пахомов, Дифференциальное масляное реле времени, Авторское свидетельство №258996, Бюллетень №2, 1970 г.
2. Б.В. Ульяницкий, В.Н. Мамуна, Пьезопривод, Авторское свидетельство №652367, Бюллетень №10, 1979 г.
Пьезопривод, включающий замкнутую масляную камеру, в которой находится разделяющий камеру на две части поршень с капиллярным каналом, выполняющим роль гидросопротивления, а также два силовых штока и балластную камеру, отличающийся тем, что силовые штоки оппозитно прикреплены к поршню с капиллярным каналом, а их свободные концы выведены за пределы масляной камеры и один из этих концов расположен в балластной камере, при этом один из силовых штоков состоит из втулки с ввинченным в нее фиксирующимся в рабочем положении штоком, конец которого, расположенный внутри указанной втулки, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала при вращении штока, а другой конец этого штока образует свободный конец силового штока.edrid.ru
пьезопривод — патент РФ 2086417
Использование: для работы в вакууме. Сущность изобретения: пьезопривод содержит корпус, цилиндрический кожух, кольцо из теплопроводной резины, последовательно связанные между собой пьезоэлемент в виде набора пьезокерамических колец, вибрирующую накладку, упругие пластины, шайбу, упругий элемент и валик. Один торец кожуха закреплен на шайбе, упругие пластины расположены под углом к плоскости торца шайбы, кольцо из теплопроводной резины установлено на вибрирующей накладке и размещено с зазором не более 0,1 мм внутри кожуха со стороны его свободного торца, а смазочный материал расположен между кольцом из теплопроводной резины и шайбой внутри кожуха. 4 з.п. ф-лы, 2 ил. Изобретение относится к машиностроению, а более конкретно, к устройствам пьезоприводов, работающих в вакууме или экологически чистых средах. Известен пьезопривод, содержащий вибратор, шайбу, причем вибратор расположен под углом к нормали, проведенной в месте контакта вибратора с периферийной шайбой [1]Его недостатком является невозможность обеспечения работы в вакууме при повышении надежности и износостойкости. Прототипом изобретения является пьезопривод, содержащий корпус, расположенные внутри корпуса упругие пластины и соосно установленные пьезоэлемент, шайбу и валик [2]
Недостатком прототипа также является невозможность обеспечения работы в вакууме при повышении надежности и износостойкости. Техническим результатом от использования изобретения является обеспечение возможности работы пьезопривода в вакууме при повышении надежности и износостойкости. Данный результат достигается за счет того, что в пьезопривод введены цилиндрический кожух, вибрирующая накладка, упругий элемент, кольцо из теплопроводной резины, смазочный материал, а пьезоэлемент выполнен в виде набора пьезокерамических колец, причем пьезоэлемент, вибрирующая накладка, упругие пластины, шайба, упругий элемент и валик последовательно связаны между собой, один торец кожуха закреплен на шайбе, упругие пластины расположены под углом к плоскости торца шайбы, кольцо из теплопроводной резины установлено на вибрирующей накладке и размещено с зазором не более 0,1 мм внутри кожуха со стороны его свободного торца, а смазочный материал расположен между кольцом из теплопроводной резины и шайбой внутри кожуха. Кроме того, смазочный материал может быть выполнен в виде сухой смазки, в качестве которой используется дисульфид молибдена. Смазочный материал может быть выполнен в виде легкоплавкого материала, причем в этом случае на внешней боковой поверхности кольца из теплопроводной резины выполняются проточки. В качестве легкоплавкого металла может быть использован галлий. Введение в устройство пьезопривода цилиндрического кожуха, вибрирующей накладки, упругого элемента, кольца из теплопроводной резины, смазочного материала в виде сухой смазки или легкоплавкого металла позволяет осуществлять процесс трения в вакууме с обязательным наличием «третьего тела», что и обеспечивает достижение поставленного результата обеспечение возможности в вакууме при повышении надежности и износостойкости. На фиг. 1 показан пьезопривод с сухой смазкой; на фиг. 2 пьезопривод со смазкой в виде легкоплавкого металла. Пьезопривод содержит корпус 1, расположенные внутри корпуса упругие пластины 2 и соосно установленные пьезоэлемент 3, шайбу 4 и валик 5. В пьезопривод введены цилиндрический кожух 6, вибрирующая накладка 7, упругий элемент 8, кольцо 9 из теплопроводной резины и смазочный материал 10. Пьезоэлемент 3 выполнен в виде набора пьезокерамических колец 11, причем пьезоэлемент 3, вибрирующая накладка 7, упругие пластины 2, шайба 4, упругий элемент 8 и валик 5 последовательно связаны между собой. Упругие пластины 2 жестко закреплены на торце 12 шайбы 4 и контактно взаимодействуют с торцом 13 вибрирующей накладки 7. Один торец 14 кожуха 6 закреплен на шайбе 4, упругие пластины 2 расположены под углом к плоскости торца 12 шайбы 4. Кольцо 9 из теплопроводной резины установлено на вибрирующей накладке 7 и размещено с зазором не более 0,1 мм внутри кожуха 6 со стороны его свободного торца 15. Смазочный материал 10 расположен между кольцом 9 из теплопроводной резины и шайбой 4 внутри кожуха 6. При использовании в качестве смазочного материала 10 легкоплавкого металла (фиг.2) на внешней боковой поверхности 16 кольца из теплопроводной резины 9 выполнены проточки 17. Пьезопривод работает следующим образом. При подаче на пьезокерамические кольца 11 напряжения вибрирующая накладка 7 начинает совершать осевые колебания. За счет того что упругие пластины расположены под углом к плоскости торца 13 вибрирующей накладки 7, образуется окружная составляющая усилия, которая и обеспечивает вращение валика 5. Наличие сухой смазки 16 (фиг. 1) в зоне контакта упругих пластин 2 и торца 13 вибрирующей накладки 7 обеспечивает наличие «третьего тела» и как результат снижение износа контактирующих элементов 13, 2. Аналогичный результат имеет место при использовании легкоплавкого металла галлия в качестве смазки (фиг. 2). Твердый галлий, имеющий температуру плавления 29,8oC, за счет тепла в зоне трения расплавляется и оказывает смазочное действие на поверхности контакта. Одновременно галлий является и хорошим теплопроводящим материалом, что способствует интенсивному теплоотводу через галлий. Наличие на внешней боковой поверхности 16 кольца 9 из теплопроводящей резины проточек 17 предохраняет галлий от вытекания из зоны трения контактирующих элементов 13, 2.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Пьезопривод, содержащий корпус, расположенные внутри корпуса упругие пластины и соосно установленные пьезоэлемент, шайбу и валик, отличающийся тем, что в него введены цилиндрический кожух, вибрирующая накладка, упругий элемент, кольцо из теплопроводной резины, смазочный материал, а пьезоэлемент выполнен в виде набора пьезокерамических колец, причем пьезоэлемент, вибрирующая накладка, упругие пластины, шайба, упругий элемент и валик последовательно связаны между собой, один торец кожуха закреплен на шайбе, упругие пластины расположены под углом к плоскости торца шайбы, кольцо из теплопроводной резины установлено на вибрирующей накладке и размещено с зазором не более 0,1 мм внутри кожуха со стороны его свободного торца, а смазочный материал расположен между кольцом из теплопроводной резины и шайбой внутри кожуха. 2. Пьезопривод по п.1, отличающийся тем, что смазочный материал выполнен в виде сухой смазки. 3. Пьезопривод по п. 2, отличающийся тем, что в качестве сухой смазки использован дисульфид молибдена. 4. Пьезопривод по п.1, отличающийся тем, что смазочный материал выполнен в виде легкоплавкого металла, а на внешней боковой поверхности кольца из теплопроводной резины выполнены проточки. 5. Пьезопривод по п.4, отличающийся тем, что в качестве легкоплавкого металла использован галлий.www.freepatent.ru
Пьезопривод
Изобретение относится к нефтяной промышленности, а именно к техническим средствам отбора глубинных проб жидкостей.
Для отбора глубинных проб жидкостей из скважин применяются различные глубинные пробоотборники, в частности спускаемые на забой скважины с помощью канатной техники автономные глубинные пробоотборники с пьезоприводом. Пьезопривод представляет собой гидравлическое реле времени, приводимое в действие давлением жидкости и газа в скважине.
Известно дифференциальное масляное реле времени, содержащее рабочую и приемную камеры с поршнями, разделитель с клапаном и гидросопротивлением, а также головкой с размещенным в ней клапаном, выполненным в виде цилиндрического поршня с выточкой (1).
Наиболее близким к патентуемому техническому решению является пьезопривод (2), содержащий две одинаковых по размерам цилиндрические камеры, заполненные маслом, отделенные одна от другой поперечной перегородкой с дросселирующим отверстием. В каждой камере находятся поршни с силовыми штоками, имеющими возможность соединения с клапанным или иным устройством глубинного прибора, а также размещенные по обе стороны от перегородки дополнительные поршни с капиллярными каналами, выполняющими роль гидросопротивления.
Недостатком известного пьезопривода является необходимость для регулирования времени срабатывания замены поршней с встроенными в них не регулируемыми гидросопротивлениями, что связано с разборкой узла пьезопривода и связанной с этим потерей части масла, также с опасностью засорения при разборке в полевых условиях, что, в свою очередь, снижает надежность срабатывания пьезопривода.
Задачей патентуемого изобретения является повышение надежности срабатывания пьезопривода.
Технический результат заключается в обеспечении возможности изменять при прочих равных условиях время перемещения поршня пьезопривода без его разборки и извлечения встроенного гидросопротивления.
Указанные задача и технический результат достигаются пьезоприводом, включающим замкнутую масляную камеру, в которой находится разделяющий камеру на две части поршень с капиллярным каналом, выполняющим роль гидросопротивления, а также два силовых штока и балластную камеру, и который выполнен с возможностью регулирования проходного сечения капиллярного канала без разборки пьезопривода.
В пьезоприводе для этого силовые штоки оппозитно прикреплены к поршню с капиллярным каналом, а их свободные концы выведены за пределы масляной камеры и один из этих концов расположен в балластной камере, при этом один из силовых штоков состоит из втулки с ввинченным в нее фиксирующимся в рабочем положении штоком, конец которого, расположенный внутри указанной втулки, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала при вращении штока, а другой конец этого штока образует свободный конец силового штока.
При вращении свободного конца штока, выступающего из масляной камеры, его конец, находящийся внутри втулки, выполненный в виде иглы, изменяет проходное сечение капиллярного канала в поршне (гидросопротивления), что позволяет регулировать время перемещения поршня без разборки узла пьезопривода.
На фиг. 1 изображен общий вид пьезопривода, присоединенного к клапанному узлу глубинного пробоотборника.
Пьезопривод состоит из замкнутой масляной камеры 1 с уплотнительными кольцами 2 и 3, поршня 4 с капиллярным каналом 5 и уплотнительными кольцами 6, силового штока 7, силового штока 8 с уплотнительным кольцом 9, втулки 10 с контргайкой 11, балластной камеры 12. Клапанный узел пробоотборника состоит из корпуса 13 с клапаном 14, возвратной пружиной 15 и с приемными отверстиями 16. К корпусу 13 присоединен корпус приемной камеры 17 с разделительным поршнем 18.
Пьезопривод представляет собой отдельный узел, одной стороной присоединяемый к клапанному узлу глубинного пробоотборника и взаимодействующий с ним при помощи силовых штоков 7 или 8. Пьезопривод имеет масляную камеру 1, заполненную рабочей жидкостью (маслом), внутри которой находится разделяющий камеру на две части поршень 4 с уплотнительными кольцами 6. Внутри поршня 4 выполнен капиллярный канал 5. К торцу поршня 4 присоединен с помощью резьбы силовой шток 7. К противоположному торцу поршня 4 оппозитно присоединена втулка 10, в которую ввинчивается на резьбе с возможностью фиксации в рабочем положении силовой шток 8 с уплотнительным кольцом 9. Конец силового штока 8, находящийся внутри втулки 10, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала 5 при вращении штока 8. На силовом штоке 8 имеется контргайка 9, фиксирующая его в рабочем положении при определенном перекрытии капиллярного канала указанной иглой. Для уплотнения силовых штоков 7 и 8 в корпусе камеры 1 имеются уплотнительные кольца 2 и 3.
Работа устройства осуществляется следующим образом.
При воздействии скважинного давления через приемные отверстия 16 на втулку 10 силовой шток 8 с втулкой 10 и поршень 4 с силовым штоком 7 перемещаются до крайнего положения, при этом втулка 10 с силовым штоком 8 погружается в камеру 1 через отверстие с уплотнительным кольцом 2, а силовой шток 7 выдвигается из нее через отверстие с уплотнительным кольцом 3. При движении поршня 4 жидкость, находящаяся в камере 1, перетекает из одной части камеры 1 в другую через капиллярный канал 5. При одинаковых термобарических условиях скорость перемещения поршня 4 зависит от того, насколько игла на конце силового штока 8, находящаяся внутри втулки 10, перекрывает капиллярный канал 5 в поршне 4. Силовой шток 8, перемещаясь вместе с поршнем 4, выходит из полости в корпусе клапанного узла 13, сообщая приемные отверстия 16 с приемной камерой 17, а силовой шток 7 выдвигается в балластную камеру 12.
Скорость движения поршня 4 зависит от степени перекрытия иглой капиллярного канала 5 в поршне 4, то есть от величины гидросопротивления, и регулируется углом поворота штока 8 относительно втулки 10. После установки величины гидросопротивления и, следовательно, времени до открытия приемных отверстий пробоотборника в данных термобарических условиях угол поворота штока фиксируется с помощью контргайки 11. После отбора глубинной пробы и извлечения пробоотборника из скважины пьезопривод отсоединяется от клапанного узла пробоотборника и от балластной камеры 12. При этом открывается доступ к силовым штокам 7 и 8 и в случае необходимости можно увеличить или уменьшить время срабатывания пьезопривода, изменив угол поворота штока 8. Таким образом, обеспечивается возможность задавать время срабатывания глубинного пробоотборника непосредственно на скважине без разборки узла пьезопривода для замены гидросопротивления.
Для повторного использования пьезопривода достаточно, перевернув камеру 1 на 180 градусов, присоединить ее к корпусу клапанного узла 13, при этом выдвинутый силовой шток 7 перекроет доступ скважинной жидкости в приемную камеру 17. К камере 1 привинчивается балластная камера 12, после чего пьезопривод готов к использованию.
Литература:
1. А.Г. Пахомов, Дифференциальное масляное реле времени, Авторское свидетельство №258996, Бюллетень №2, 1970 г.
2. Б.В. Ульяницкий, В.Н. Мамуна, Пьезопривод, Авторское свидетельство №652367, Бюллетень №10, 1979 г.
Пьезопривод, включающий замкнутую масляную камеру, в которой находится разделяющий камеру на две части поршень с капиллярным каналом, выполняющим роль гидросопротивления, а также два силовых штока и балластную камеру, отличающийся тем, что силовые штоки оппозитно прикреплены к поршню с капиллярным каналом, а их свободные концы выведены за пределы масляной камеры и один из этих концов расположен в балластной камере, при этом один из силовых штоков состоит из втулки с ввинченным в нее фиксирующимся в рабочем положении штоком, конец которого, расположенный внутри указанной втулки, выполнен в виде иглы, изменяющей проходное сечение капиллярного канала при вращении штока, а другой конец этого штока образует свободный конец силового штока.edrid.ru
Большая Энциклопедия Нефти и Газа, статья, страница 2
Пьезопривод
Cтраница 2
Игла перемещается над образцом при постоянном напряжении, причем с помощью системы обратной связи, управляющей пьезоприводом перемещения иглы, ток поддерживается постоянным. При этом точность движения иглы настолько высока, что разрешающая способность по вертикали ограничивается только амплитудой вибраций и составляет всего несколько сотых долей ангстрема. [16]
Им разработан принципиально новый класс акусто -, опто — и пьезоэлектронных устройств и систем, а именно пьезотрансформаторы и источники электропитания на их основе; пьезодвигатели, пьезомикроманипуляторы, пьезоприводы с системами управления; сегнетопьезоэлектрические запоминающие устройства ( ЗУ) вычислительной техники; измерительные пьезопреобразователи параметров движения и другие устройства и системы автоматики, вычислительной техники и радиоэлектроники. [17]
Для выполнения этой программы предусмотрен пьезопривод с гидравлическим затвором. Камера 9 пьезопривода заполнена рабочей жидкостью, а камера 4 — вязким маслом. [18]
В скважине нефть через отверстия 15 проникает в пробоотборник и приводит в действие пьезопривод. Холостой ход пьезопривода, необходимый для спуска прибора на необходимую глубину, продолжается до тех пор, пока головка 16 штока не дойдет до края гайки 17, навинченной на хвостовик форклапана 14, и шток / 8 не потянет за собой форклапан. Когда втулка 10 на конце пружины 12 достигает головки винта / /, пружина натягивается и прижимает клапан 9 к посадочному месту, герметизируя камеру. Проба транспортируется в камере прибора. Для этого после извлечения пробоотборника из скважины от него отсоединяют пьезопривод и балластную камеру, а на концы приемной камеры навинчивают защитные колпачки. [19]
Характерной особенностью пикнометриче-ской капсулы является отсутствие в ней постоянно фиксированного объема. Под действием пьезопривода поршни начинают медленно расходиться, наращивается объем капсулы, который, по мере образования, заполняется пробой. Когда поршни окажутся в крайних положениях, весь объем капсулы будет заполнен пробой. Такое заполнение исключает опасность разгазирования пробы и обеспечивает ее представительность. [20]
Принцип действия триометра в скважине также схож с принципом действия пикнометра. На заданной глубине пьезопривод ( гидравлическое силовое реле времени) приводит в действие систему поршней капсулы таким образом, что герметически изолированный и строго определенный объем пластовой нефти при пластовых давлении и температуре оказывается каптированным в капсуле триометра. После извлечения триометра из скважины капсулу взвешивают, а затем находящуюся в ней нефть разгазируют. При этом измеряют объем выделившегося газа и нефти. На основании этих данных определяют плотность, газосодержание и объемный коэффициент пластовой нефти. [22]
Балластная 1 и пробоотборная 3 камеры разделены переходником 2 с клапаном. Пробоотборная камера и камера пьезопривода 10 перед спуском прибора в скважину заполняются маслом. Полость под клапаном 5 изолирована от внешней среды уплот-нительными кольцами форклапана 7, который представляет собой полый цилиндр. Торец форклапана связан с пружиной 6, а внутри его находится хвостовик 8 поршня пьезопривода. При спуске прибора в скважину давление окружающей среды воздействует на поршень 9 пьезопривода. [23]
Перед спуском в скважину положение узлов глубинного пикнометра такое, как указано на рис. II. Первое время шток 7 пьезопривода движется вхолостую, не воздействуя на другие узлы прибора. Холостой ход необходим для обеспечения возможности спуска прибора на заданную глубину. Вслед за поршнем 3 в капсулу 6 начнет поступать нефть из скважины. Чека 1 удерживает поршень 2 на месте до тех пор, пока поршень 3 не дойдет до гайки на конце штока 4 ( рис. II. [24]
Основным узлом глубинного пикнометра является пикнометрическая капсула, снабженная системой поршней, обеспечивающих доступ пластовой нефти в полость капсулы и герметизацию отобранной пробы. Взаимодействие системы поршней регулируется пьезоприводом — гидравлическим силовым реле времени. [26]
Торец форклапана связан с пружиной 6, а внутри его находится хвостовик 8 поршня пьезопривода. При спуске прибора в скважину давление окружающей среды воздействует на поршень 9 пьезопривода. [27]
В РТМ используется явление туннелирования электронов между двумя близко расположенными электродами. Принцип работы РТМ заключается в том, что металлическая игла, закрепленная в трехко-ординатном пьезоприводе, перемещается над исследуемой поверхностью на расстоянии, обеспечивающем протекание туннельного тока. [28]
Пробоотборник состоит из блоков: приемной и балластной камер, механизма управления. Последний представляет собой гидравлическое реле времени, которое приводится в действие давлением нефти в скважине ( пьезопривод) и регулирует поступление нефти в приемную камеру в процессе отбора пробы. [30]
Страницы: 1 2 3
www.ngpedia.ru
Пьезоэлектроника. Основы функционирования и принципы пьезоэлектрических устройств.
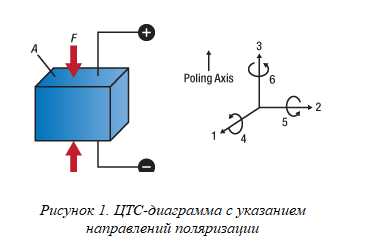
Пьезоэлектричество — явление, при котором электрическое поле механически воздействует на материал. В результате электрическое поле индуцируется в ответ на деформацию (прямой пьезоэффект), либо деформация вызывается от действия электрического поля (обратный пьезоэффект). Благодаря этому пьезоэлектрики широко применяются как в датчиках, так и в приводах. Пьезоэлектрики часто называют «умными» или «интеллектуальными» материалами. В частности, цирконат-титанат свинца (ЦТС) применяется во всех пьезоэлектрических устройствах.
Цирконат-титанат свинца – это керамический материал, из которого созданы почти все пьезоэлектрические устройства, доступные на сегодняшний день. Пьезоэлектрик проявляет свойства пироэлектрические и сегнетоэлектрические. ЦТС-устройства обеспечивают слаженную работу механических устройств благодаря пьезоэлектрическому эффекту, описанного системой уравнений, где поведение электрического поля связывается с законом Гука:
В матричной форме уравнения примут вид:
Здесь D – вектор электрического смещения, ε – вектор напряженности, E – вектор электрического поля, σm –тензор напряжения, eσij – тензор диэлектрической проницаемости пьезоматериала, ddim и dcjk – пьезоэлектричекие коэффициенты, и sEkm – коэффициент податливости. Элементы матрицы используются для вычисления параметров пьезоэлектрического прибора, но полный вывод этих уравнений выходит за рамки данного руководства.
На рисунке 1 представлена упрощенная модель ЦТС-устройства. Схема приведена для случая, когда вектора силы и перемещения лежат в одной плоскости с осью поляризации (она определяется электрическим полем). Напряжение задается как F / A. Основываясь на этом, можно сделать следующий вывод: при любой механической деформации модуль противодействующей силы будет пропорционален площади поперечного сечения.
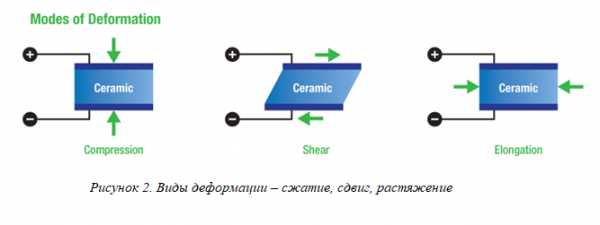
Мы рассмотрели случай, когда пьезоэлектрический элемент двигается одномерно. Однако в целом пьезокерамика может деформироваться по-разному (см. рисунок 2). Именно это становится основной сложностью при использовании ЦТС-приводов. Позднее мы вернемся к этой теме.
Типы пьезоактюаторов
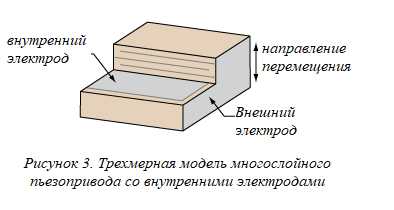
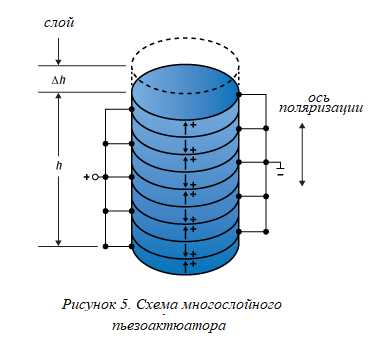
Существует три основных типа пьезокерамических актюаторов: низковольтные, высоковольтные и кольцевые. Сейчас широко распространены многослойные пьезоактюаторы. На рисунках 4 и 5 (см. ниже) демонстрируется различие многослойных дискретных и монолитных электроприводов.
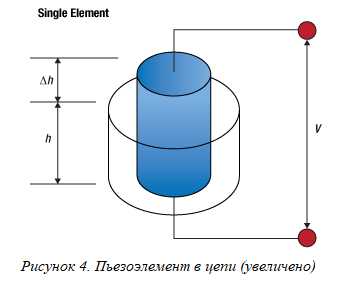
Для любой заданной высоты h привода внешнее устройство может производить большее смещение, пропорциональное площади сечения. Это выведено из уравнения деформации:
Здесь n — число слоев. Таким образом, можно легко убедиться, что изменение высоты пропорционально числу слоев. К достоинствам такого рода структуры относят низкое потребляемое напряжение, быстрое время отклика, высокую мощность, а также надежное соединение. Есть еще один вид актюаторов, биморфный, но в данной статье он не рассматривается.
Низковольтные пьезоприводы
Рабочее напряжение низковольтных пьезоприводов — ниже 200 В. Эти устройства представляют собой монолитные многослойные устройства. В таких структурах слои сплавлены между собой, а не склеены (см. рисунок 3).
Все пьезоактюаторы в основном небольшого размера и прямоугольной формы. Электроемкость достигает порядка нескольких мкФ, инструменты имеют высокий модуль упругости. Пьезоприводы достаточно бюджетны, отлично подходят для точного позиционирования. Основным неудобством в процессе эксплуатации пьезоактюаторов является их малых размер – чем миниатюрнее модель, тем более тщательный расчет воздействующей силы потребуется.
Высоковольтные пьезоприводы
Высоковольтные пьезоактюаторы в среднем работают от напряжения в 500 В. В отличие от структуры низковольтных «коллег», слои в таких пьезоприводах склеены, а между ними вставлены электроды и пьезокерамические пластины. Также высоковольтные актюаторы значительно больше, пьезокерамика в таких инструментах имеет меньший модуль упругости.
Пьезоприводы высокого напряжения имеют цилиндрическую форму, их электроемкость составляет несколько сотен нФ. Площадь сечения высоковольтных приводов достаточно велика, что позволяет развивать большую мощность и выдерживать более высокие температуры.
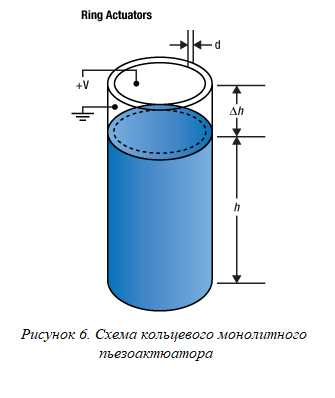
Кольцевые пьезоприводы
Кольцевые пьезоприводы — это полые цилиндрические монолитные устройства (см. рисунок 6). Такие пьезоактюаторы имеют несколько преимуществ в производительности и надежности по сравнению с монолитными прямоугольными пьезоактюаторами. Снижение пьезоэффекта в приводе происходит из-за перегрева: пьезокерамика имеет низкую теплопроводность. Это негативно влияет на качество работы и приводит к сокращению срока службы.
Кольцевой привод имеет большую площадь поверхности – таким образом, происходит рассеивание тепла, и привод может выдерживать высокие температуры.
Стоит отметить преимущества геометрии кольцевой структуры: из равного объема пьезоматериала можно получить гораздо больший радиус кольца, увеличивая при этом конструкционную надежность инструмента без потерь на изменение электроемкости.
Пьезоэлектроника от Thorlabs

Компания Thorlabs занимается разработкой пьезоэлектроники в широком масштабе. Команда инженеров Thorlabs имеет почти двадцатилетний опыт работы в пьезоэлектронике.
Выбор пьезоматериала осуществляется на основе требований, заданных особенностями изготовляемого привода (например, размер, смещение, напряжение и т. д.). Для многослойных устройств используются электроды из серебра / палладия. Трафареты электродов специально разработаны для данных устройств. Как только слои керамических блоков и соединительные внутренние электроды собраны, они помещаются в изостатический пресс. Так увеличивается плотность устройства, улучшаются его механические свойства и производительность. Затем этот блок разрезают. Следующий этап – связывание материала. Будущее пьезоэлектрическое устройство проходит через цикл термической обработки, остатки растворителя внутри керамики полностью удаляются. Это помогает устранить дефекты конструкции целой партии, повышая надежность и эффективность всего производственного процесса.
 После цикла нагревания будущий пьезоэлемент готов для плавления. Материал скрепляется без термической деформации керамического тела. На этом же этапе достигается необходимая плотность устройства. Финиширование изделия, исправление отклонений осуществляется с помощью высокоточных притирочных станков. Далее устройства проходят очистку, после чего получается почти готовый пьезоэлемент. Остается лишь нанести и обжечь серебряные электроды. Это процесс продолжается 8-12 часов, он усиливает адгезию между серебряными электродами и керамичской основой.
После цикла нагревания будущий пьезоэлемент готов для плавления. Материал скрепляется без термической деформации керамического тела. На этом же этапе достигается необходимая плотность устройства. Финиширование изделия, исправление отклонений осуществляется с помощью высокоточных притирочных станков. Далее устройства проходят очистку, после чего получается почти готовый пьезоэлемент. Остается лишь нанести и обжечь серебряные электроды. Это процесс продолжается 8-12 часов, он усиливает адгезию между серебряными электродами и керамичской основой.
Пока устройства технически не являются пьезоэлектриками, поскольку термически обработанная ЦТС-керамика все еще проявляет свойства изотропности. Чтобы устранить это, устройства проходят этап полирования.
Каждое устройство подвергается сильному воздействию электрического поля через электроды, таким образом активируются его пьезоэлектрические свойства. Затем все пьезоэлементы по отдельности тестируются на элекроемкость, коэффициент рассеяния, резонансную частоту, импеданс, пропускание, ход и пьезоэлектрическую постоянную d33. Инженеры Thorlabs сопровождают все процедуры изготовления и тестирования устройств, гарантируя высокое качество и надежность.
Специалисты компании занимаются проектированием автономных и интегрированных ЦТС-устройств. Есть возможность создания устройств специальной конфигурации.
Компания INSCIENCE является прямым поставщиком продукции Thorlabs на территории РФ. Вы можете получить подробную информацию и коммерческие условия обратившись к специалистам нашей компании.
in-science.ru
