ПИ-регулятор
ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Статическую ошибку, возникающую при пропорциональном регулировании,
можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Математически этот процесс может быть описан следующей зависимостью:
где – коэффициент пропорциональности интегральной составляющей, а
Тu ‘ постоянная времени интегрирования, параметр настройки регулятора.
Если 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0.
Рассмотрим физический смысл постоянной времени интегрирования. Предположим, что на вход регулятора поступил сигнал , а пропорциональная составляющая отсутствует ( = 0). При этом выходной сигнал будет меняться по закону
По истечении времени t = значение выходного сигнала будет равно
(рис.1.13а).
Таким образом, постоянная времени интегрирования в ПИ-регуляторе равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала.
Переходной процесс в ПИ-регуляторе показан на рис.1.13б. Устраняя статическую ошибку интегральный регулятор, однако, ухудшает качество переходного процесса. Поэтому на практике применяют комбинированные ПИ-регуляторы.
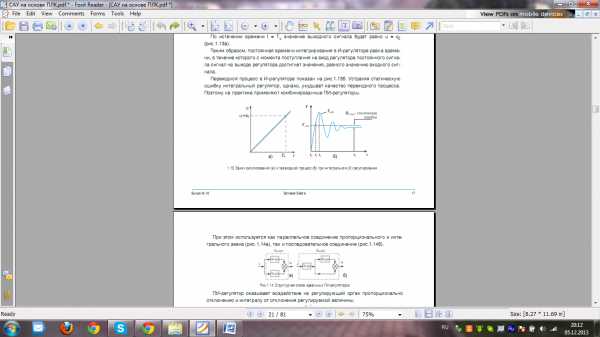
Рисунок 1 — Закон регулирования (а) и переходной процесс (б) при интегральном (И) регулировании.
При этом используется как параллельное соединение пропорционального и интегрального звена (рис.2а), так и последовательное соединение (рис.2б).
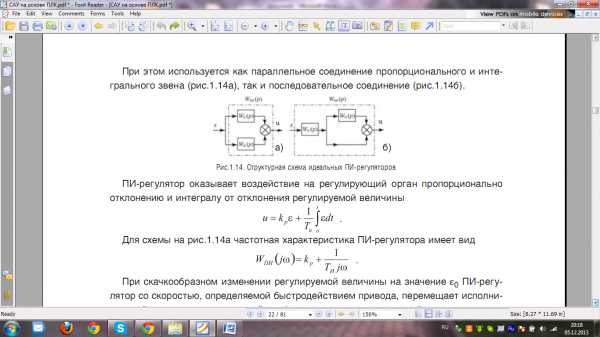
Рисунок 2 — Структурная схема идеальных ПИ-регуляторов.
ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.
Для схемы на рисунке 2а частотная характеристика ПИ-регулятора имеет вид :
При скачкообразном изменении регулируемой величины на значение ε0 ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью , пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
Переходная характеристика ПИ-регулятора для параллельного соединения на рисунке 2а показана на рисунке 3(прямая 1).
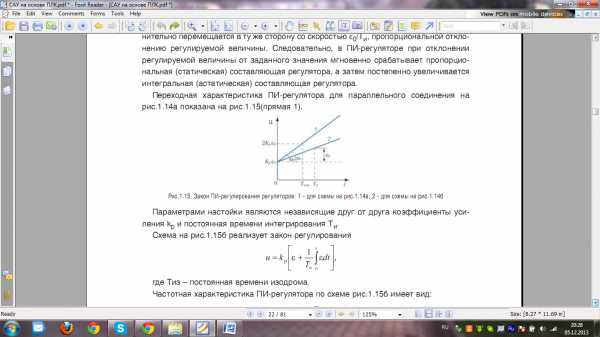
Рисунок 3 — Закон ПИ-регулирования регуляторов: 1 — для схемы на рисунке2а, 2 — для схемы на рисунке 2б.
Параметрами настойки являются независящие друг от друга коэффициенты усиления и постоянная времени интегрирования .
Схема на рисунке 3б реализует закон регулирования
где – постоянная времени изодрома.
Частотная характеристика ПИ-регулятора по схеме рисунке 3б имеет вид:
Таким образом, ПИ-регулятор со структурной схемой, приведенной на рисунке 3б, имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту . Так, при настройке коэффициента усиления будет изменяться и постоянная времени интегрирования:
Рассмотрим физический смысл постоянной времени изодрома . Предположим, что на вход регулятора поступил постоянный сигнал . Тогда
При поступлении на вход регулятора сигнала в начальный момент сработает пропорциональная составляющая и на выходе регулятора появится сигнал . В дальнейшем линейно начинает нарастать выходной сигнал от интегральной составляющей и при достигнет значения .
– это время, в течение которого от начала действия интегральной (астатической) составляющей регулятора пропорциональная (статическая) составляющая удваивается. Переходной процесс при ПИ-регулировании показан на рисунке 4.

Рисунок 4 — Переходной процесс при пропорционально-интегральном регулировании.
ПИ-регулятор обеспечивает нулевую ошибку в установившемся состоянии.
Варианты структурных схем промышленных ПИ-регуляторов приведены на
Рисунке 5.

Рисунок 5 — Структурные схемы промышленных ПИ-регуляторов.
Выбирая ту или иную схему, можно подобрать наиболее подходящую структуру для Вашей задачи.
Рассмотрим следящую систему управления зеркалом телескопа, представленную на рисунке 6:
Исходные данные:Электромеханическая постоянная времени ДПТ — Тм = 0.3 с
Постоянная времени якоря ДПТ — Тя = 0.015 с
Постоянная времени короткозамкнутой цепи ЭМУ — Ткз = 0.06 с
Постоянная времени цепи управления ЭМУ — Ту = 0.007 с
Постоянные времени последовательного корректирующего устройства:
T1 = 7.69 с
T2 = 2 с
T3 = 0.25 с
T4 = 0.059 с
T5 = 0.016 с
T6 = 0.007 с
T7 = 0.003 с
T8 = 0.281 с
T9 = 0.016 с
Коэффициент усиления скорректированной системы — Кsk = 77
Коэффициент усиления нескорректированной системы — Кnesk = 5
Коэффициент усиления ЭМУ — КЭМУ = 7
Коэффициент передачи редуктора — Кр = 0.075
Коэффициент усиления разомкнутой системы по возмущению — Кf= 0.039
Время регулирования — tp = 1 с
Показатель колебательности — M = 1.2
Для составления функциональной схемы САР необходимо знать все элементы, из которых состоит система.
В следящей системе управления зеркалом телескопа используются сельсин-датчик СД, сельсин-приемник СП, фазочувствительный выпрямитель ФЧВ, электромашинный усилитель ЭМУ, двигатель постоянного тока ДПТ и редуктор Р.
Функциональная схема системы автоматического регулирования представлена на рисунке 7:
Рисунок 7 – Функциональная схема
Принцип работы системы.
Система находится в покое, когда заданное и фактическое положение телескопа соответствуют друг другу.
Для измерения угла рассогласования следящей системы применяются сельсины, работающие в трансформаторном режиме.
При повороте ротора сельсина-датчика на угол вх на выходе сельсина-приемника создается напряжение соответствующей фазы и амплитуды.
Выходной сигнал сельсина-приемника поступает на фазочувствительный выпрямитель, задачей которого является преобразование входного переменного напряжения в постоянный ток, причем полярность выходного напряжения определяется фазой входного напряжения.
Выходной сигнал выпрямителя воздействует на обмотку управления электромашинного усилителя. Двигатель через редуктор воздействует на зеркало телескопа и управляет положением однофазной обмотки сельсина-приемника (ротор сельсина-приемника с помощью обратной связи возвращается в согласованное положение с ротором сельсина датчика и двигатель останавливается).
Если заданное и фактическое положения зеркала телескопа совпадают, то положения однофазных обмоток сельсинов одинаковы и система находится в покое. В противном случае система будет находиться в движении.
Процесс регулирования выглядит следующим образом:
вх (= вх — вых) Uоу iоу Uдв nдв вых
(= вх — вых)
Структурная схема системы автоматического регулирования приведена на рисунке 8.
Построение переходных процессов в скорректированной и в нескорректированной системах.
Передаточная функция скорректированной системы имеет вид:
Передаточная функция скорректированной замкнутой системы имеет вид:
Схема, построенная в среде Matlab для нескорректированной системы (рисунок 9):
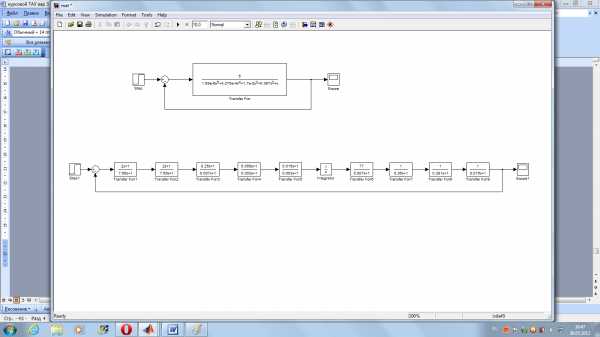
Рисунок 9 – Схема нескорректированной системы
Переходный процесс нескорректированной системы (рисунок 10):
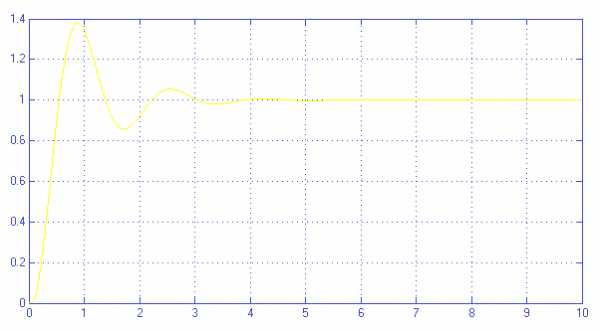
Рисунок 10 – График переходного процесса нескорректированной системы
Схема, построенная в среде Matlab для скорректированной системы (рисунок 11):
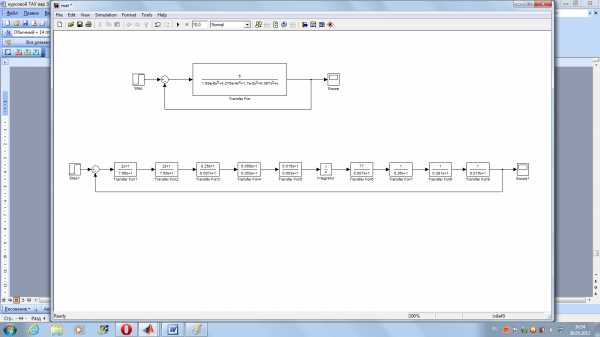
Рисунок 11 — Схема скорректированной системы
Переходный процесс скорректированной системы (рисунок 12):
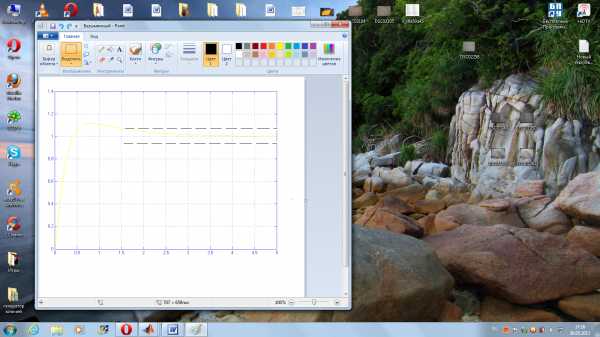
Рисунок 12 — График переходного процесса скорректированной системы
Схема САУ с ПИ-регулятором выглядит следующим образом:
Рисунок 13 – Схема САУ
Строим и моделируем схему в Matlab для передаточной функции.
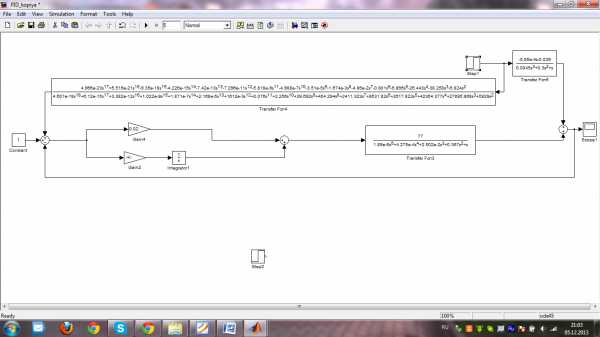
Рисунок 14 — Схема с ПИ-регулятором.
Переходный процесс САУ с ПИ-регулятором представлен на рисунке 15:
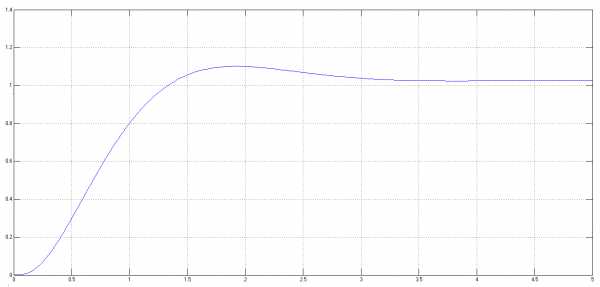
Рисунок 15 – переходный процесс.
принцип действия, схема и т.д.
П-регулирование, оно же пропорциональное регулирование — это способ регулирования, основанный на законе пропорционального регулирования, при котором характеристики выходного сигнала пропорциональны характеристикам входного сигнала.
Другими словами, если вход пропорционального регулятора возрастет на некоторую величину, вывод регулятора увеличится на некоторую соответствующую величину и, если вход уменьшится, выход тоже уменьшится на соответствующую величину.
Обратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Закон П-регулирования
Пропорциональный закон регулирования — это процесс регулирования, при котором относительное изменение регулирующего воздействия (выходного сигнала регулятора) пропорционально относительному отклонению регулируемой величины.
Принцип работы П-регулирования
При пропорциональном регулировании ступенчатый сигнал на вводе приводит к ступенчатому изменению сигнала на выходе, а линейно изменяющийся сигнал на входе дает линейно изменяющийся сигнал на выходе. Иначе говоря, в пропорциональном регуляторе относительное изменение выходного сигнала (регулирующего воздействия) пропорционально относительному отклонению регулируемой величины (входного сигнала регулятора). Это позволяет устранить зону нечувствительности, характерную для двухпозиционного регулирования.
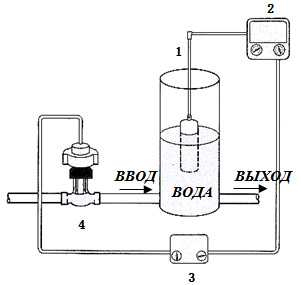 Простая система автоматического регулирования
Простая система автоматического регулированияКогда уровень воды в резервуаре изменяется, первичный чувствительный элемент (1) преобразовывает изменение в механическое движение. Механическое движение измеряется измерительным элементом (2) и преобразовывается в пневматический сигнал. Пневматический сигнал передается регулирующему элементу (регулятору) (3), который измеряет сигнал, сравнивает его с уставкой, вычисляет разность и вырабатывает сигнал управления (корректирующее воздействие), передаваемый к конечному элементу системы регулирования (4). Конечный элемент регулирования (в нашем примере пневматический регулирующий клапан) перемещается согласно выходному сигналу регулятора, изменяя приток воды в резервуар.
www.kipiavp.ru
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: «устройство регулирования (черный ящик) обеспечивающие на своем выходе обратную связь регулируемого параметра, или его изменения, описываемую передаточной функцией типа П, ПИ и т.д……. «. При этом:
- П, (P) — означает «пропорциональный»
- И(I) — «интегральный»
- Д(D) — «дифференциальный»
- ПИ (PI) — «пропорциональный и интегральный»
- ПД (PD) — «пропорциональный и дифференциальный»
- ПИД (PID) — «пропорциональный, интегральный и дифференциальный»
Очень важное замечание — в подавляющем большинстве случаев эти регуляторы обеспечивают отрицательную обратную связь изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u. Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют «ошибкой» или «отклонением», Х — «заданным уровнем» или «заданным значением», причем Х, в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы «верхний» контур регулирования был «медленным» по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора, как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
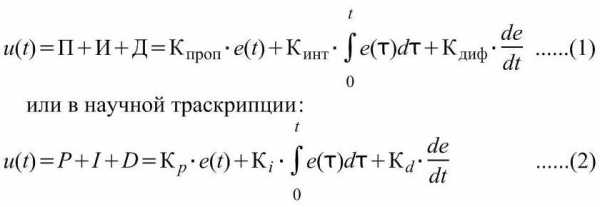
где «тау» — время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
- Kp — пропорциональный коэффициент усиления
- Pb=1/Kp — относительный диапазон регулирования
- Ki — интегральный коэффициент усиления
- Ti=1/Ki — постоянная интегрирования (размерность — время)
- Kd — дифференциальный коэффициент усиления
- Td=Kd — постоянная дифференицирования (размерность — время)
Очевидно, что функция содержит 3 слагаемых, первое — пропорциональное к изменению заданного параметра, второе — интегральное, а третье — дифференциальное . В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : — величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. Передаточная функция П (P) регулятора описывается уравнением: u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: — величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: — величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку — если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D (коэффициент Ki уравнения (2) равен нулю).
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
тут нет никакого подвоха, все то же самое, просто другая запись.
tehtab.ru
ПИД регулятор | КИПиА Портал
Автоматическое регулирование – это автоматическое обеспечение заданных значений параметров, определяющих требуемое протекание управляемого процесса в соответствии с установленной программой.
Параметры управляемого процесса, подлежащие заданным изменениям или стабилизации — называют регулируемыми параметрами.
Устройство, обеспечивающее автоматическое поддержание заданного значения — регулируемого параметра в управляемом объекте или его изменения по определенному закону, называют регулятором.
Всякий технологический процесс характеризуется определенными физическими величинами. Для обеспечения требуемого режима работы эти величины необходимо поддерживать постоянными или изменять по тому или иному закону.
Физические величины, определяющие ход технологического процесса — называются параметрами технологического процесса.
Так параметрами технологического процесса могут быть давление, температура, уровень жидкости, концентрация вещества, расход вещества или энергии, скорость изменения какой-либо величины и т.п.
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону — называется регулируемой величиной или регулируемым параметром.
Аппарат, машина, агрегат или процесс в котором регулируются те или иные параметры технологического процесса — называются объектом регулирования или регулируемым объектом.
Значение регулируемой величины, которое оператор стремится получить в установившемся режиме от находящейся в равновесии системы регулирования при заранее заданных режимах ее работы — называется заданным значением.
Значение же регулируемой величины в рассматриваемый момент времени — называется ее мгновенным или истинным значением.
Регулятор, как часть системы автоматического регулирования САР
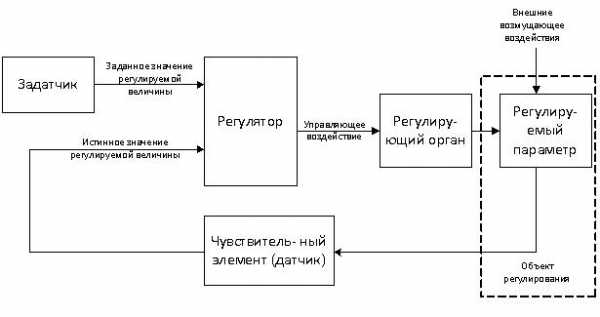
Рисунок 1.
Задатчик — устройство, предназначенное для задания значения регулируемой величины.
Чувствительный элемент (датчик) – устройство, реагирующее на изменение регулируемой величины и предназначенное для преобразования значения регулируемого параметра (температура, давление, расход, уровень) в сигнал понятный регулятору (ток, напряжение, пневмосигнал линейное перемещение).
Регулирующий орган – устройство, с помощью которого регулятор может влиять на изменение величины регулируемого параметра (клапана, шибера, пускатели, реле и т.п.). Регулирующий орган изменяет количество вещества или энергии, подводимых к объекту или отводимых от него
Внешние возмущающие воздействие — это внешние воздействия на систему, т.е. причины, вызывающие отклонения регулируемой величины от заданного значения.
Примеры внешних возмущающих воздействий:
Расход продукта в трубе (F) зависит от разности давлений P1 и P2. Если изменится хотя бы одно давление, то изменится и расход.
При смешении продуктов температура t зависит от температур t1 и t2 и количества Q1 и Q2 смешиваемых продуктов. При изменении одного из этих параметров приведет к изменению температуры продукта t.
На регулятор приходит два сигнала: заданное значение (от задатчика) и истинное значение (от датчика) регулируемого параметра. Разность этих сигналов называется рассогласованием или отклонением (ε). Регулятор определяет величину рассогласования и в соответствии с заложенным в него алгоритмом (см. Алгоритмы работы регуляторов) вырабатывает управляющее воздействие на регулирующий орган. Регулирующий орган влияет на значение регулируемого параметра (приоткрывая или прикрывая регулирующий клапан, увеличивает или уменьшает значение регулируемого параметра). Кроме этого на значение регулируемого параметра влияют также внешние возмущающие воздействия. Очевидно, необходимость в регулировании возникает вследствие появления внешних возмущающих воздействий, так как при их отсутствии регулируемая величина не изменялась бы.
Следовательно, задача регулирования сводится к устранению отклонения регулируемой величины от требуемого значения при любых внешних возмущениях.
Алгоритмы работы регуляторов
Алгоритм работы любого регулятора может быть основан на законах регулирования:
— пропорциональный (П)
— интегральный (И)
— пропорционально — интегральный (ПИ)
— пропорционально — дифференциальный (ПД)
— пропорционально – интегрально – дифференциальный (ПИД)
Пропорциональные регуляторы (П-регуляторы) воздействуют на регулирующий орган пропорционально отклонению регулируемой величины от заданного значения
y=kx,
где y – управляющее воздействие регулятора; x – регулируемая величина; k – коэффициент пропорциональности (передачи).
Интегральные регуляторы (И-регуляторы) воздействуют на регулирующий орган пропорционально интегралу от отклонения регулируемой величины
где kp, — коэффициент передачи регулятора по скорости.
В И-регуляторе скорость перемещения исполнительного механизма (скорость воздействия на регулирующий орган) пропорциональна отклонению регулируемой величины.
Коэффициент передачи регулятора kp численно равен скорости перемещения исполнительного механизма при отклонении регулируемой величины на единицу ее измерения.
Так как интегральный регулятор может иметь два органа настройки (например, скорости перемещения собственно интегрирующего исполнительного механизма и коэффициента механической передачи между исполнительным механизмом и регулирующим органом), то уравнение закона регулирования интегрального регулятора запишется также в виде
Величина k называется коэффициентом пропорциональности, Ти постоянная времени интегрирования.
Пропорционально – интегральный регулятор (ПИ – регулятор) представляет собой совокупность пропорционального и интегрального регуляторов
Постоянная времени Ти определяет величину составляющей регулирующего воздействия, пропорциональной интегралу от отклонения регулируемой величины x , и численно равна времени удвоения регулятора kx0, т.е. времени, в течении которого первоначальное значение выходной величины регулятора равное , удваивается в следствии действия одной только его интегральной части (рисунок 2)
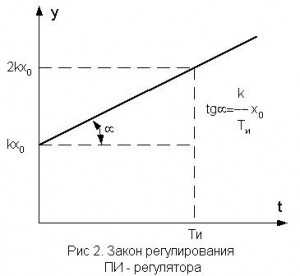
Скорость перемещения исполнительного механизма в ПИ – регуляторе пропорциональна как скорости изменения регулируемой величины, так и самому изменению регулируемой величины.
Если при настройке ПИ – регулятора установить очень большую величину постоянной времени Ти, то он превратится в П – регулятор.
Если при настройке регулятора установить очень малые значения k и Ти, но при этом так, чтобы их отношение k/Ти имело существенную величину, получим И – регулятор с коэффициентом передачи по скорости k/Ти .
Закон регулирования ПИ – регулятора представлен на рисунке 2.
Параметрами настройки ПИ – регулятора являются коэффициент пропорциональности k и постоянная времени интегрирования Ти.
Пропорционально – дифференциальные регуляторы (ПД — регуляторы) оказывают воздействие на регулирующий орган пропорционально отклонению регулируемой величины и скорости ее отклонения
Постоянная времени Тд называется постоянной времени дифференцирования. Она определяет величину составляющей регулирующего воздействия по скорости.
Пропорционально – интегрально – дифференциальные регуляторы (ПИД – регуляторы) воздействуют на регулирующий орган пропорционально отклонению x регулируемой величины, интегралу этого отклонения и скорости изменения регулируемой величины
При скачкообразном изменении регулируемой величины идеальный ПИД – регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на регулирующий орган; затем величина воздействия мгновенно падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ – регуляторе, постепенно начинает оказывать свое влияние интегральная составляющая регулятора.
Параметрами настройки регулятора являются:
коэффициент пропорциональности регулятора k,
постоянная времени интегрирования Ти,
постоянная времени дифференцирования Тд.
Этот регулятор по возможности настройки является более универсальным по сравнению с другими регуляторами. С его помощью можно осуществлять различные законы регулирования.
Так при Тд=0 и бесконечно большой величине Ти , получаем П – регулятор. При Тд=0, устанавливая достаточно малые значения k и Ти , но так, чтобы отношение значения k /Ти имело существенную величину, получаем И – регулятор. Так при Тд=0 и конечных значениях k и Ти имеем ПИ – регулятор. При бесконечно большой величине Ти и конечных значениях k иТд получаем ПД – регулятор.
Приборы — регуляторы
Регуляторы по роду используемого сигнала бывают механическими, пневматическими, гидравлическими, электронными.
Механические регуляторы
В механических регуляторах схемы выполнены на рычагах, пружинах и т.п. В большинстве случаев механический регулятор содержит помимо схемы регулятора еще и датчик, и регулирующий орган. Механические регуляторы являются специализированными – предназначены для регулирования только определенного технологического параметра. Так, например регулятором давления нельзя регулировать расход. Механические регуляторы не имеют информационных выходных каналов, поэтому результаты их работы нельзя вывести на компьютер оператора.
Преимущества механических регуляторов
Механические регуляторы не требуют настройки. Механические регуляторы просты в использовании, необходимо только задать необходимое значение технологического параметра, с помощью задатчика (рычажка, вращающейся рукоятки и т.п.). Механические регуляторы достаточно надежны в эксплуатации.
Пневматические регуляторы
В пневматических регуляторах схемы сделаны из мембран, сильфонов и пневматических элементов логики (УСЭППА). Носителем сигнала в пневматических регуляторах является давление воздуха от 0,2 до 1 кгс/см2 . Конструктивно пневматический регулятор представляет из себя устройство имеющее входы для подключения датчика и выход для подключения регулирующего органа. Эти регуляторы так же, как и механические, не имеют информационных выходных каналов и результаты их работы нельзя вывести на компьютер оператора.
Гидравлические регуляторы
Гидравлические регуляторы по принципу работы идентичны пневматическим, только в качестве сигнала используется давление жидкости.
Электронные регуляторы
Электронный регулятор представляют собой законченное устройство, выполненное на полупроводниковых элементах. Информация в электронном регуляторе представлена в виде ого электрического сигнала (тока или напряжения). Поэтому стало возможным вынести из электронного регулятора датчик и регулирующий орган, а в корпусе регулятора оставить только схемы регулирования. Кроме того в большинстве случаев сигналы от датчика к регулятору и от регулятора к исполнительному органу являются унифицированными (0 — 5 мА, 0 — 20 мА, 4 — 20 мА). Исходя из этого к электронным регуляторам можно подключать датчики, измеряющие разные технологические параметры и имеющие разные шкалы. Кроме этого к электронным регуляторам можно подключать регулирующие органы, имеющие разное конструктивное исполнение. Это делает электронные регулятор более универсальными в отличии от механических. В настоящее время электронные регуляторы оснащены информационными каналами, с помощью которых можно отслеживать их работу с помощью компьютера оператора.
Электронные регуляторы могут быть реализованы двумя способами:
— реализующие алгоритм управления схемотехническим путем (схемные)
— реализующие алгоритм управления программным путем (программные)
Алгоритм регулирования схемных регуляторов закладывается в них при создании на заводе и не может быть изменен в ходе эксплуатации.
С методикой настройки регуляторов вы можете ознакомиться здесь и здесь
kipia-portal.ru
Что такое пи регулирование температуры. Пропорционально-интегральный дифференциальный (ПИД)- закон регулирования
Среди множества приборов, предназначенных для коммутации, управления и выполнения других функций хочется отметить ПИД-регулятор, используемый в цепях обратной связи. Он устанавливается в системы с автоматическим управлением и поддерживает на определенном уровне значение какого-либо параметра. В большинстве случаев ПИД-регулятор участвует в регулировке температурных режимов и других величин, участвующих в различных процессах.
Общие сведения о ПИД-регуляторе
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый — с сигналом рассогласования.
- Второй — с интегралом сигнала рассогласования.
- Третий — с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.
Рисунок 2 — Структурная схема регулятора с аналоговым выходом
где:
АР — непрерывный ПИД-регулятор с аналоговым выходом,
Д — датчик,
НП — нормирующий преобразо
lab-music.ru
Определение п пи пид закона регулирования. Основные законы регулирования
ПИД (от англ. P-proportional, I-integral, D-derivative) — регулятором называется устройство, применяемое в контурах управления, оснащенных звеном обратной связи. Данные регуляторы используют для формирования сигнала управления в автоматических системах, где необходимо достичь высоких требований к качеству и точности переходных процессов.
Управляющий сигнал ПИД-регулятора получается в результате сложения трех составляющих: первая пропорциональна величине сигнала рассогласования, вторая — интегралу сигнала рассогласования, третья — его производной. Если какой-то из этих трех компонентов не включен в процесс сложения, то регулятор будет уже не ПИД, а просто пропорциональным, пропорционально-дифференцирующим или пропорционально-интегрирующим.
Первый компонент — пропорциональный
Выходной сигнал дает пропорциональная составляющая. Сигнал этот приводит к противодействию текущему отклонению входной величины, подлежащей регулированию, от установленного значения. Чем больше отклонение — тем больше и сигнал. Когда на входе значение регулируемой величины равно заданному, то выходной сигнал становится равным нулю.
Если оставить только эту пропорциональную составляющую, и использовать только ее, то значение величины, подлежащей регулированию, не стабилизируется на правильном значении никогда. Всегда есть статическая ошибка, равная такому значению отклонения регулируемой величины, что выходной сигнал стабилизируется на этом значении.
К примеру, терморегулятор управляет мощностью нагревательного прибора. Выходной сигнал уменьшается по мере приближения требуемой температуры объекта, и сигнал управления стабилизирует мощность на уровне тепловых потерь. В итоге заданного значения температура так и не достигнет, ибо нагревательный прибор в просто должен будет быть выключен, и начнет остывать (мощность равна нулю).
Больше коэффициент усиления между входом и выходом — меньше статическая ошибка, но если коэффициент усиления (по сути — коэффициент пропорциональности) будет слишком большим, то при условии наличия задержек в системе (а они зачастую неизбежны), в ней вскоре начнутся автоколебания, а если увеличить коэффициент еще больше — система попросту утратит устойчивость.
Или пример позиционирования двигателя с редуктором. При малом коэффициенте нужное положение рабочего органа достигается слишком медленно. Увеличить коэффициент — реакция получится более быстрая. Но если увеличивать коэффициент дальше, то двигатель «перелетит» правильную позицию, и система не перейдет быстро к требуемому положению, как хотелось бы ожидать. Если теперь увеличивать коэффициент пропорциональности дальше, то начнутся осцилляции около нужной точки — результат снова не будет достигнут…
Второй компонент — интегрирующий
Интеграл по времени от величины рассогласования — есть основная часть интегрирующей составляющей. Она пропорциональна этому интегралу. Интегрирующий компонент используется как раз для исключения статической ошибки, поскольку регулятор со временем учитывает статическую погрешность.
В отсутствие внешних возмущений, через какое-то время подлежащая регулированию величина будет стабилизирована на правильном значении, когда пропорциональная составляющая окажется равной нулю, и точность выхода будет целиком обеспечена интегрирующей составляющей. Но интегрирующая составляющая тоже может породить осцилляции около точки позиционирования, если коэффициент не подобран правильно.
Третий компонент — дифференцирующий
Темпу изменения отклонения величины, подлежащей регулированию, пропорциональна третья — дифференцирующая составляющая. Она необходима для того, чтобы противодействовать отклонениям (вызванным внешними воздействиями или задержками) от правильного положения, прогнозируемого в будущем.
Как вы уже поняли, ПИД-регуляторы применяют для поддержания заданного значения х0 некоторой одной величины, благодаря изменению значения u другой величины. Есть уставка или заданное значение х0, и есть разность или невязка (рассогласование) е = х0-х. Если система линейна и стационарна (практически это вряд ли возможно), то для задания u справедливы нижеследующие формулы:
В этой формуле вы видите коэффициенты пропорциональности для каждого из трех слагаемых.
Практически в ПИД-регуляторах используют для настройки другую формулу, где коэффициент усиления применен сразу ко всем компонентам:
Практическая сторона ПИД-регулирования
Практически теоретический анализ ПИД-регулируемых систем редко применяют. Сложность состоит в том, что характеристики объекта управления неизвестны, и система практически всегда нестационарна и нелинейна.
Реально работающие ПИД-регуляторы всегда имеют ограничение рабочего диапазона снизу и сверху, это принципиально объясняет их нелинейность. Настройка поэтому практически всегда и везде производится экспериментальным путем, когда объект управления подключен к системе управления.
Использование величины, формируемой программным алгоритмом управления, обладает рядом специфических нюансов. Если речь, например, о регулировке температуры, то часто требуется все же не одно, а сразу два устройства: первое управляет нагревом, второе — охлаждением. Первое подает разогретый теплоноситель, второе — хладагент. Три варианта практических решений может быть рассмотрено.
Первый — близок к теоретическому описанию, когда выход — аналоговая и непрерывная величина. Второй — выход в форме набора импульсов, например для управления шаговым двигателем. Третий — , когда выход с регулятора служит для задания ширины импульсов.
Сегодня системы автоматизации практически все строятся , и ПИД-регуляторы представляют собой специальные модули, добавляемые к управляющему контроллеру или вообще реализуемые программно путем загрузки библиотек. Для правильной настройки коэффициентов усиления в таких контроллерах, их разработчики предоставляют специальное ПО.
Андрей Повный
Сегодняшняя статья будет посвящена такой замечательной вещи, как . По определению, пропорционально-интегрально-дифференциальный регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. Чаще всего можно встретить примеры, где ПИД-регулятор используется для регулировки температуры, и, на мой взгляд, этот пример прекрасно подходит для изучения теории и понимания принципа работы регулятора. Поэтому именно задачу регулировки температуры и будем сегодня рассматривать.
Итак, что у нас имеется?
Во-первых, объект, температуру которого необходимо поддерживать на заданном уровне, кроме того, эту температуру необходимо регулировать извне. Во-вторых, наше устройство на базе микроконтроллера, с помощью которого мы и будем решать поставленную задачу. Кроме того, у нас есть измеритель температуры (он сообщит контроллеру текущую температуру) и какое-нибудь устройство для управления мощностью нагревателя. Ну и поскольку необходимо как-то задавать температуру, подключим микроконтроллер к ПК.
Таким образом, у нас есть входные данные – текущая температура и температура, до которой необходимо нагреть/остудить объект, а на выходе мы должны получить значение мощности, которое необходимо передать на нагревательный элемент.
И для такой задачи, да и вообще любой похожей задачи, отличным решением будет использование пропорционально-интегрально-дифференциального регулятора 😉
Пропорциональная составляющая.
Здесь все просто, берем значение нужной нам температуры (уставку) и вычитаем из него значение текущей температуры. Получаем рассогласование (невязку). Умножаем полученную невязку на коэффициент и получаем значение мощности, которое и передаем на нагреватель. Вот и все) Но при использовании только пропорциональной составляющей есть два больших минуса – во-первых, эффект от нашего воздействия наступает не моменталь
lab-music.ru
Глоссарий и часто задаваемые вопросы
Подключение термопреобразователей сопротивления
Принцип работы термопреобразователей сопротивления (ТСМ, ТСП, ТСН, Pt100 и др.) основан на зависимости электрического сопротивления металлов от температуры. Термопреобразователи выполняют в виде катушки из тонкой медной или платиновой проволоки на каркасе из изоляционного материала, заключенной в защитную гильзу.
Термопреобразователи сопротивления характеризуются двумя параметрами: R0 — сопротивление датчика при 0 °С и W100 — отношение сопротивления датчика при 100 °С к его сопротивлению при 0 °С. В связи с введением нового ГОСТа на термопреобразователи сопротивления (ГОСТ Р 8.6252006) для новых приборов ОВЕН в документации вместо W100 приведен параметр α – отношение разницы сопротивлений датчика, измеренных при температуре 100 и 0 °С, к его сопротивлению, измеренному при 0 °С (R0), деленное на 100 °С.
Для подключения термопреобразователей сопротивления к приборам ОВЕН используется трехпроводная схема, которая позволяет уменьшить погрешность измерения, возникающую при изменении сопротивления проводов (например, при изменении их температуры). К одному из выводов терморезистора Rt подсоединяются два провода, а третий подключается к другому выводу Rt.
При этом необходимо соблюдать условие равенства сопротивлений всех трех проводов.
Подключение термопар
Термопара (термоэлектрический преобразователь) типа ТХА, ТХК, ТПП и пр. состоит из двух спаянных на одном из концов проводников, изготовленных из металлов, обладающих разными термоэлектрическими свойствами.
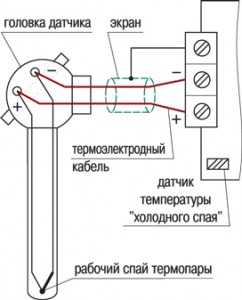 Спаянный конец, называемый «рабочим спаем», погружается в измеряемую среду, а свободные концы («холодный спай») термопары подключаются ко входу измерителей-регуляторов. Если температуры «рабочего» и «холодного спаев» различны, то термопара вырабатывает термоЭДС, которая и подается на прибор.
Спаянный конец, называемый «рабочим спаем», погружается в измеряемую среду, а свободные концы («холодный спай») термопары подключаются ко входу измерителей-регуляторов. Если температуры «рабочего» и «холодного спаев» различны, то термопара вырабатывает термоЭДС, которая и подается на прибор.
Поскольку термоЭДС зависит от разности температур двух спаев термопары, то для получения корректных показаний необходимо знать температуру «холодного спая», чтобы скомпенсировать эту разницу в дальнейших вычислениях.
В модификациях входов, предназначенных для работы с термопарами, предусмотрена схема автоматической компенсации температуры свободных концов термопары. Датчиком температуры «холодного спая» служит полупроводниковый диод, установленный рядом с присоединительным клеммником.
Подключение термопар к прибору должно производиться с помощью специальных компенсационных (термоэлектродных) проводов, изготовленных из тех же материалов, что и термопара. Допускается использовать провода из металлов с термоэлектрическими характеристиками, аналогичными характеристикам материалов электродов термопары в диапазоне температур 0…100 °С. При соединении компенсационных проводов с термопарой и прибором необходимо соблюдать полярность.
Во избежание влияния помех на измерительную часть прибора линию связи прибора с датчиком рекомендуется экранировать. В качестве экрана может быть использована заземленная стальная труба.
При нарушении указанных условий могут иметь место значительные погрешности при измерении.
Подключение датчиков с унифицированным выходным сигналом тока или напряжения
Многие датчики различных физических величин оснащены нормирующими измерительными преобразователями. Нормирующие преобразователи преобразуют сигналы с первичных (термопар, термопреобразователей сопротивления, манометров, дифманометров и др.) в унифицированный сигнал постоянного тока или напряжения с диапазонами: 0…20 мА, 4…20 мА, 0…5 мА или 0…1 В. Диапазон выходного тока нормирующего преобразователя пропорционален значению физической величины, измеряемой датчиком, и соответствует рабочему диапазону датчика, указанному в его технических характеристиках.
В ряде приборов ОВЕН имеется встроенный источник питания постоянного тока, гальванически изолированный от схемы прибора.
Схема подключения датчиков с унифицированным выходным сигналом 4…20 мА по двухпроводной линии к прибору 2ТРМ1:
со встроенным источником питания
с внешним питанием
Измерение влажности психрометрическим методом
Психрометрический метод основан на измерении разности температур сухого и влажного термометров. Температура влажного термометра всегда ниже температуры сухого из-за испарения воды с поверхности фитиля. Чем суше воздух (влажность ниже), тем интенсивнее испаряется вода с поверхности фитиля, тем ниже температура увлажняемого термометра.
Существуют полуэмпирические психрометрические формулы, из которых выведена
общепринятая формула относительной влажности: φ — относительная влажность воздуха, %; Евлаж. — максимально возможное парциальное давление водяного пара при температуре воздуха Твлаж., °С; Есух. — максимально возможное парциальное давление водяного пара при температуре воздуха Тсух., °С; р — атмосферное давление; Тсух. — температура сухого термометра, °С; Твлаж. — температура влажного термометра, °С; A — психрометрический коэффициент (психрометрическая постоянная). |
Психрометрический коэффициент A зависит от многочисленных факторов:
- размера и формы чувствительного элемента увлажнённого термометра;
- вида и состояния смачиваемого фитиля;
- температуры смачивающей воды и теплопроводности фитиля;
- влияния тепловой радиации.
Среди внешних факторов наибольшее значение имеет скорость воздушного потока, обдувающего увлажненный термометр. Если она больше 2,5 м/сек, то коэффициент A приближается к величине ~0,0064 1/°С. Если обдува нет, то коэффициент A сильно возрастает, поэтому рекомендуется устанавливать принудительную вентиляцию. В приборах ОВЕН значение A устанавливается пользователем — например, в МПР51 допускаются значения 0,0064…0,008 1/°С.
«Сухой» и «влажный» датчики температуры следует крепить один над другим на расстоянии 50…100 мм:
перпендикулярно стенке
параллельно стенке.
Под «влажным» датчиком помещается резервуар с водой, в который опускается увлажняющий фитиль, закрывающий датчик. Резервуар изготавливается из нержавеющей стали, оцинкованного железа, термостойкой пластмассы, стекла или другого стойкого к условиям эксплуатации материала, не выделяющего вредных вещества. Увлажняющий фитиль чаще всего изготавливается из тонкой неотбеленной хлопчатобумажной ткани — марли, батиста, муслина, обладающих максимальной всасывающей способностью. Фитиль должен закрывать чувствительный элемент и максимальную площадь поверхности датчика.
Для снижения площади испарения воды из резервуара рекомендуется «бутылочный» профиль резервуара.
Для пополнения резервуара можно поставить дополнительный резервуар вне камеры и соединить его с внутренним.
Установка диапазона измерения при использовании датчиков с унифицированным выходным сигналом постоянного тока или напряжения (масштабирование)
При работе с датчиками, формирующими на выходе унифицированный сигнал тока или напряжения, в измерителях регуляторах ОВЕН предусматривается возможность масштабирования шкалы измерения по каждому из каналов. Для этого в соответствующих параметрах программирования прибора устанавливаются нижняя и верхняя границы диапазона измерения, а также положение десятичной точки.
Параметр «нижняя граница диапазона измерения» определяет, какое значение будет выводиться на индикатор при минимальном уровне сигнала с датчика (например, при 4 мА для датчика с выходным сигналом тока 4…20 мА).
Параметр «верхняя граница диапазона измерения» определяет, какое значение будет выводиться на индикатор при максимальном уровне сигнала с датчика (например, при 20 мА для датчика с выходным сигналом тока 4…20 мА или 1 В для датчика с выходным сигналом напряжения 0…1 В).
Параметр «положение десятичной точки» определяет количество знаков после запятой, которое будет выводиться на индикатор.
owen.ru
