Законы регулирования в автоматике с примерами
Закон регулирования — это зависимость перемещения регулирующего органа от отклонения регулируемой переменной. Качество регулирования обеспечивается выбором закона регулирования. Наибольшее распространение получили следующие пять основных законов регулирования: двухпозиционный, пропорциональный, интегральный, дифференциальный и пропорционально-интегрально-дифференциальный (ПИД).
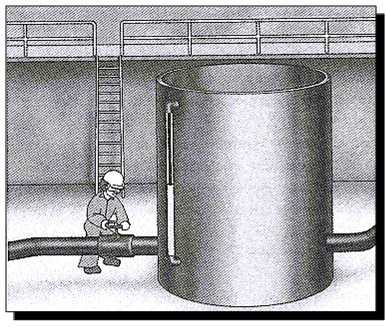 Система ручного регулирования уровня
Система ручного регулирования уровняОбратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Двухпозиционный закон регулирования — это «Двухпозиционное регулирование», которое называют еще «Старт-стопное регулирование». Чтобы моделировать двухпозиционный режим регулирования, оператор на рисунке выше устанавливал бы регулирующий клапан в одно из двух крайних положений: или полностью открыт, или полностью закрыт, то есть «включено» или «выключено». Так, например, если уровень будет низким, оператор откроет клапан полностью, чтобы вода могла наполнить резервуар. Затем, как только вода достигнет желаемого уровня, оператор полностью закроет клапан, чтобы прекратить приток воды в резервуар.
Чтобы моделировать пропорциональный закон регулирования, оператор непрерывно устанавливал бы регулирующий клапан в положение, отвечающее произошедшему на данный момент изменению уровня. Так, например, если уровень понизился немного, оператор откроет клапан немного; если уровень понизился еще больше, оператор увеличит степень открытия клапана. Наоборот, если уровень несколько повысится, оператор уменьшит степень открытия клапана на соответствующую величину. Таким образом, моделируя пропорциональное регулирование, оператор непрерывно в соответствии с изменением уровня изменяет положение клапана. Регулирование уровня при этом будет выполняться более эффективно, чем при простом открытии и закрытии клапана. Когда изменения уровня прекращаются, оператор прекращает позиционирование клапана.
Так как при пропорциональном регулировании выходной корректирующий сигнал вырабатывается на изменения регулируемой переменной процесса, пропорциональный регулятор не дает выходного управляющего сигнала, если регулируемая переменная процесса не изменяется. Например, когда уровень в резервуаре изменяется, оператор открывает или закрывает клапан пропорционально этим изменениям. Когда изменения уровня прекращаются, оператор останавливает позиционирование клапана. При этом уровень установится на некоторой отметке, но это может не быть заданное значение уровня. Это означает, что при пропорциональном регулировании может быть смещение регулируемой переменной процесса или ошибка регулирования. В определенных системах это вполне приемлемо. Если же смещение регулируемой переменной не допускается, надо применить другой закон регулирования: интегральный, при котором обеспечивается возвращение регулируемой переменной к уставке.
Чтобы моделировать
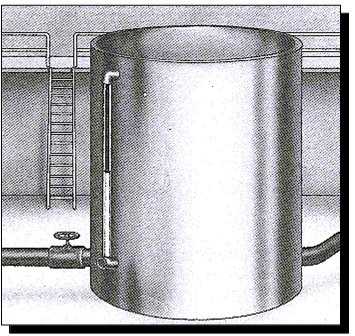 Система регулирования уровня с большой емкостью
Система регулирования уровня с большой емкостьюРисунок выше иллюстрирует процесс, который может требовать применения другого закона регулирования. Этот процесс — тот же самый процесс поддержания уровня из первого примера, отличающийся лишь тем, что емкость резервуара много больше, в то время как питательная труба остается той же самой. Это означает, что, когда оператор открывает или закрывает клапан как прежде, оказывается меньшее непосредственное влияние на уровень в резервуаре. При увеличения уровня, пропорциональное регулирование могло бы отработать воздействия, направленные на снижение уровня, но действие не было бы достаточно быстрым, чтобы поддерживать уровень внутри желательных ограничений.
Закон дифференциального регулирования используется, чтобы предотвратить чрезмерное отклонение регулируемой переменной от уставки, вырабатывая корректирующее воздействие пропорциональное скорости отклонения. Так, моделируя дифференциальный закон регулирования, оператор изменяет степень открытия регулирующего клапана в соответствии со скоростью возрастания отклонения уровня от уставки. Например, если уровень начал понижаться, оператор быстро увеличит степень открытия приточного клапана (при чем эти изменения положения клапана большие, чем при чисто пропорциональном законе регулирования), чтобы замедлить скорость изменения уровня и, в конечном счете, стабилизировать уровень. Если уровень начал быстро понижаться, оператор должен быстро и значительно открыть клапан, чтобы замедлить скорость падения уровня и потом его стабилизировать.
Последним мы рассмотрим пропорционально-интегрально-дифференциальный закон регулирования. Чтобы воспроизвести этот закон регулирования, оператор изменяет положение регулирующего клапана в зависимости от величины отклонения, скорости изменения и продолжительности рассогласования. Другими словами, оператор в этом случае объединяет пропорциональный, интегральный и дифференциальный законы регулирования.
www.kipiavp.ru
ПИД-закон регулирования. Методы нахождения ПИД коэффициентов
Наиболее простой закон регулирования температуры — позиционный. При этом методе, на нагреватель подается полная мощность до достижения заданного значения температуры, после чего подача мощности прекращается. Несмотря на это, разогретый нагреватель продолжает отдавать тепло и температура объекта какое-то время продолжает нарастать, что приводит к перегреву, иногда значительному. При последующем остывании объекта, по достижении заданного значения температуры, на нагреватель вновь подается полная мощность. Нагреватель сначала разогревает себя, затем окружающие области объекта, и, таким образом, охлаждение будет продолжаться до тех пор, пока волна тепла не достигнет датчика температуры. Следовательно, реальная температура может оказаться значительно ниже заданного значения. Таким образом, при позиционном законе регулирования возможны значительные колебания температуры около заданного значения.
Этот недостаток можно уменьшить или даже вовсе устранить, применяя пропорционально- интегрально-дифференциальный закон регулирования (ПИД закон). ПИД предполагает уменьшение мощности, подаваемой на нагреватель, по мере приближения температуры объекта к заданной температуре. Кроме того, в установившемся режиме регулирования по ПИД закону находится величина тепловой мощности, необходимой для компенсации тепловых потерь и поддержания заданной температуры.
Пропорционально — интегрально-дифференциальный закон регулирования обеспечивает значительно более высокую точность поддержания температуры, чем позиционный. Мощность N, которая должна выделяться нагревателем, выраженная в процентах от его максимальной мощности, рассчитывается по формуле:
где Kp, Ki, Kd — пропорциональный, интегральный и дифференциальный коэффициенты регулирования соответственно (ПИД коэффициенты).
Первое слагаемое в выражении (пропорциональная составляющая) прямо пропорционально «невязке» ∆T = Tус − Т∆– разности температурной уставки Tус и измеренного значения температуры T. Его смысл состоит в том, что при «невязке» ∆T = Кр (в °С) регулятор начнет снижать мощность.
Второе слагаемое в установившемся режиме регулирования равно величине тепловой мощности, необходимой для компенсации тепловых потерь при ∆T = 0.
Третья составляющая
пропорциональна скорости изменения температуры с обратным знаком и должна препятствовать резким изменениям температуры объекта (дифференциальная составляющая).Для того, чтобы достичь высокого качества регулирования температуры необходимо правильно настроить регулятор – задать три коэффициента. Коэффициенты ПИД регулирования в приборах Термодат могут быть найдены автоматически при запуске режима автонастройки, но могут быть заданы наладчиком оборудования в режиме ручной настройки прибора. Нахождение и настройка коэффициентов требует от пользователя опыта. Рекомендации по настройке даются в специальной технической и научной литературе. Здесь мы приведём варианты настройки ПИД закона регулирования по методу Зиглера-Николсона.
Метод проб и ошибок
ПИД коэффициенты при использовании метода проб и ошибок подбираются по отдельности, чтобы наблюдать влияние каждого из них. Этот процесс является достаточно трудоёмким, так как требует проведения некоторого количества испытаний.
1. Установите температуру регулирования, близкую к той, при которой будет работать печь.
2. Включите режим регулирования с произвольным пропорциональным коэффициентом Kp (например, 20), интегральным коэффициентом Ki=«выключено», Kd=0. Если объект не подвергается динамичным внешним тепловым воздействиям, дифференциальный коэффициент можно будет и впоследствии оставить равным 0, либо подобрать его в последнюю очередь.
3. Подождите, когда температура достигнет установившегося значения или установившихся колебаний. Время установления зависит от объекта нагрева, его теплоемкости, теплоотдачи, свойств нагревателя.
4. Если в установившемся режиме отсутствуют колебания температуры (установившаяся температура в этом случае всегда будет меньше температуры регулирования), уменьшайте Kp до тех пор, пока не начнутся заметные температурные колебания обязательно с превышением температурной уставки.
5. Если в установившемся режиме уже наблюдаются колебания температуры, увеличивайте Kp до тех пор, пока колебания температуры не прекратятся.
6. Запишите критическое значение пропорционального коэффициента Кркрпри котором появляются температурные колебания (пункт 4) или прекращаются (пункт 5).
7. Измерьте и запишите период температурных колебаний τ после их появления (пункт 4) или
перед их прекращением (пункт 5).
8. Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей.
|
Тип регулирования |
Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
|
Только P |
2*Кркр |
Выключено |
Выключено |
|
P+I |
2.2*Кркр |
0.8* τ |
Выключено |
|
P+I+D |
1.7*Кркр |
0.5* τ |
0.12* τ |
Тангенциальный метод нахождения ПИД 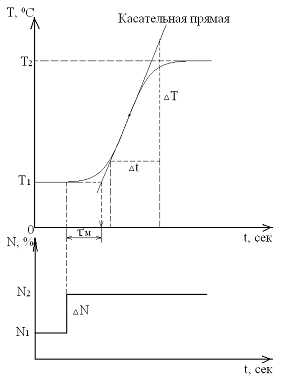
В тангенциальном методе для нахождения ПИД коэффициентов используется кривая начального разогрева объекта.
1. В режиме ручного управления контроллера задается некоторое значение мощности на нагрузке (приборы Термодат позволяют это сделать). Значение мощности должно быть таким, чтобы установившаяся температура не превысила допустимого значения. Нужно дождаться установления температуры Т1 в этом режиме и в некоторый момент времени скачком изменить значение мощности (например: на 5%). Записать процесс изменения температуры (на компьютере, на самописце или по точкам, вручную) до установления нового устоявшегося значения температуры Т2.
2. Провести касательную к полученной кривой в точке, где наклон касательной будет максимален.
3. Определить «мёртвое» время процесса как промежуток времени, прошедший с момента изменения мощности до момента времени, определяемого точкой пересечения касательной и средней линии температуры первого устойчивого состояния Т1.
4. Определить величину относительного наклона касательной по формуле:
ΔT – изменение температуры в °С,
Δt – соответствующее изменение времени в секундах,
ΔN – изменение мощности в %.
5. Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей.
|
Тип регулирования |
Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
|
Только P |
100*τм*К |
Выключено |
Выключено |
|
P+I |
111*τм*К |
3.3*τм |
Выключено |
|
P+I+D |
83*τм*К |
2*τм |
0.25*τм |
Удобный метод нахождения ПИД коэффициентов для электропечей среднего размера
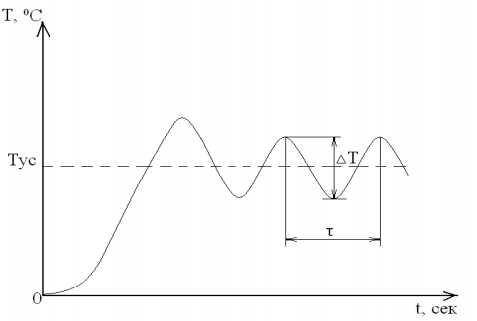
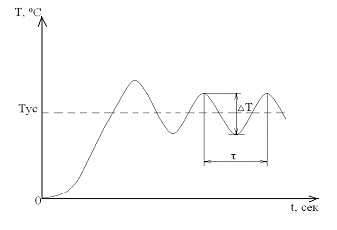 1. Назначить уставку Тус, равной температуре регулирования (или 0.7Тус, если перегрев во время настройки нежелателен, а он может быть значительным).
1. Назначить уставку Тус, равной температуре регулирования (или 0.7Тус, если перегрев во время настройки нежелателен, а он может быть значительным).2. Включить позиционный режим регулирования.
3. В установившемся режиме колебаний температуры измерить период τ колебаний температуры (время между соседними максимальными или минимальными значениями температуры). Измерить также полный размах колебаний температуры ΔТ=Тmax-Тmin (разность максимального и минимального значений температуры).
4. Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей. Параметр «Ограничение ПИД» или «Зона» (если он есть в приборе) сделать равным Kp.
|
Тип регулирования |
Пропорциональный коэффициент Kp |
Интегральный коэффициент Ki |
Дифференциальный коэффициент Kd |
|
Только P |
1.4*∆Т |
Выключено |
Выключено |
|
P+I |
1.6*∆Т |
2.4*τ |
Выключено |
|
P+I+D |
1.2*∆Т |
1.5*τ |
0.2*τ |
Заключение.
Как уже говорилось, приборы Термодат с ПИД регулированием позволяют подобрать ПИД коэффициенты в режиме автоматической настройки. Но в некоторых случаях эта процедура не приводит к успеху, например, в случае очень инерционных печей или для печей с изменяющейся во времени загрузкой. Для этих случаев в данной статье приведены три метода настройки ПИД коэффициентов «вручную». В специальной технической и научной литературе можно найти и другие методы. Нахождение и настройка ПИД коэффициентов сложный и трудоёмкий процесс. Как видно из описания методов, в каждом из них нужно построить один или несколько графиков процесса изменения температуры. Делать это с секундомером и листком бумаги утомительно и непродуктивно, особенно в случае инерционных печей, где тестовые эксперименты могут продолжаться несколько часов. Даже для одного и того же объекта процедуру настройки ПИД регулятора следует повторять, если изменились параметры объекта (например, загрузка печи) или значительно изменилась рабочая температура.
Приборы Термодат с архивом и интерфейсом позволяют существенно упростить этот процесс. Компьютерная программа позволяет организовать автоматический опрос прибора, наблюдать и распечатывать график температуры. Другой вариант использования архивной памяти приборов Термодат: измеренная температура записывается во встроенную Flash память прибора с привязкой к реальному времени, затем «скачивается» на компьютер по интерфейсу, где и представляется в виде таблиц или графиков для дальнейшей обработки.Зорин С.В., к. ф.-м. н. зам. директора по НИОКР
ООО НПП Системы контроля
kip.su
ПИД регулирование для чайников
Не знаю имеется ли в этом смысл но вот:Закончил специальность АТП — автоматизирование технологических процессов, расчет регуляторов является большей частью для моей специальности.
Выходная точность зависит от 2 компонентов — качества измерительной техники и качества управляющей техники.
Измерительная составляющая.
Термистор EPCOS NTC G560 100K — такой стоит у меня в принтере.
Имеет класc точности (1), при разбросе измеряемых температур 355 имеет погрешность в 3,55 градуса.
Номинальное сопротивление имеет 100 ом — это сопротивление при 23.5 градусах, замеряется скорее всего ток (так как плата имеет источник напряжение на входовыходах), в среднем типовые амперметры имеют класс точности 1,5 — это 200мА и 3мА погрешности (1 — 1,5 градуса).
В сумме имеем погрешность в 5 градусов Цельсия.
Управляющий механизм.
Немного полиграфии:
Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
И по делу:
Пропорциональная составляющая в логическом смысле нас не интересует.
Интегральная составляющая нужна для устранения статической ошибки (без нее регулируемая величина может иметь фиксированное отклонение, что-то вроде +5 градусов на все время регулирования).
Дифференциальная составляющая — это достаточно забавный способ регулирования. Для расчета значения в момент времени Т, она использует значение величины в момент времени Т+1. С математической точки зрения проблем нет, но в реальной жизни будущее значение нам не известно, и в реальности дифференциальная составляющая идет с задержкой по времени. Поясняю в момент времени Т мы исполняем расчетное изменения для момента Т-1. Дифференциальная составляющая собственно и регулирует.
Это был небольшой вводный курс в ТАУ.
Есть множество вариантов расчетов ПИД регуляторов, чаще всего используют метод Зиглера, есть уже готовые калькуляторы на матлабе и маткаде.
Если бы мы имели большую вычислительную емкость, на нашей плате, можно было бы использовать опытную схему регулирования (гигантские таблицы с входными изменениями и ответной регулировкой на них). Самый оптимум так как там можно задать воздействия куллера.
Подведу итог : Погрешность измерительных приборов и датчиков сводит на нет точность настройки ПИД регулятора, Если вы закажете высокоточные датчики сразу с преобразованием в hart протокол, rs232 или какой либо еще, и сможете настроить его на своей плате, у вас появится смысл точной (до 0,02) настройки ПИД. Самый легкий способ — пойти в вуз в котором преподают ТАУ (нефтяные, производственные направления) и заплатить преподавателю за расчет с настройкой (не обращайтесь к студентам они все под ответ подгоняют — ТАУ никогда не сходится).
Наиболее удачным вариантом для стабилизации температуры — это материал сопла с высокой теплоемкостью (будет долго нагревается но и колебаться температура будет меньше). Из опыта могу предложить изолировать сопло от ветра(хоть тем же каптоновым скотчем слоев на 20).
Надеюсь я ответил на большинство вопросов по этой теме.
3dtoday.ru
Методы нахождения коэффициентовПИД-регулятора
Методы нахождения коэффициентов ПИД-регулятора
Наиболее простой закон регулирования температуры — позиционный. При этом методе, нанагреватель подается полная мощность до достижения заданного значения температуры, после чегоподача мощности прекращается. Несмотря на это, разогретый нагреватель продолжает отдавать теплои температура объекта какое-то время продолжает нарастать, что приводит к перегреву, иногдазначительному. При последующем остывании объекта, по достижении заданного значениятемпературы, на нагреватель вновь подается полная мощность. Нагреватель сначала разогревает себя,затем окружающие области объекта, и, таким образом, охлаждение будет продолжаться до тех пор,пока волна тепла не достигнет датчика температуры. Следовательно, реальная температура можетоказаться значительно ниже заданного значения. Таким образом, при позиционном законерегулирования возможны значительные колебания температуры около заданного значения.
Этот недостаток можно уменьшить или даже вовсе устранить, применяя пропорциональноинтегрально-дифференциальный закон регулирования (ПИД закон). ПИД предполагает уменьшениемощности, подаваемой на нагреватель, по мере приближения температуры объекта к заданнойтемпературе. Кроме того, в установившемся режиме регулирования по ПИД закону находитсявеличина тепловой мощности, необходимой для компенсации тепловых потерь и поддержаниязаданной температуры.
Пропорционально — интегрально-дифференциальный закон регулирования обеспечиваетзначительно более высокую точность поддержания температуры, чем позиционный. Мощность N,которая должна выделяться нагревателем, выраженная в процентах от его максимальной мощности,рассчитывается по формуле:
где Kp, Ki, Kd — пропорциональный, интегральный и дифференциальный коэффициентырегулирования соответственно (ПИД коэффициенты).
Общая информация о ПИД-регуляторе
Первое слагаемое в выражении (пропорциональная составляющая) прямо пропорционально«невязке» ∆Т= ܶТус − Т∆ – разности температурной уставки ܶТус и измеренного значения температуры Т. Его смысл состоит в том, что при «невязке» ∆Т = Кр (в °С) регулятор начнет снижать мощность.
Второе слагаемое в установившемся режиме регулирования равно величине тепловоймощности, необходимой для компенсации тепловых потерь при ∆Т = 0.
Третья составляющая пропорциональна скорости изменения температуры с обратным знаком идолжна препятствовать резким изменениям температуры объекта (дифференциальная составляющая).Для того, чтобы достичь высокого качества регулирования температуры необходимо правильнонастроить регулятор – задать три коэффициента. Коэффициенты ПИД регулирования в большинстве приборов могут быть найдены автоматически при запуске режима автонастройки, но могут бытьзаданы наладчиком оборудования в режиме ручной настройки прибора. Нахождение и настройкакоэффициентов требует от пользователя опыта. Рекомендации по настройке даются в специальнойтехнической и научной литературе. Здесь приведён варианты настройки ПИД законарегулирования по методу Зиглера- Николсона.
Метод проб и ошибок
ПИД коэффициенты при использовании метода проб и ошибок подбираются по отдельности,чтобы наблюдать влияние каждого из них. Этот процесс является достаточно трудоёмким, так кактребует проведения некоторого количества испытаний.
1. Установите температуру регулирования, близкую к той, при которой будет работать печь.
2. Включите режим регулирования с произвольным пропорциональным коэффициентом Kp(например, 20), интегральным коэффициентом Ki=«выключено», Kd=0. Если объект не подвергаетсядинамичным внешним тепловым воздействиям, дифференциальный коэффициент можно будет ивпоследствии оставить равным 0, либо подобрать его в последнюю очередь.
3. Подождите, когда температура достигнет установившегося значения или установившихсяколебаний. Время установления зависит от объекта нагрева, его теплоемкости, теплоотдачи, свойствнагревателя.
4. Если в установившемся режиме отсутствуют колебания температуры (установившаясятемпература в этом случае всегда будет меньше температуры регулирования), уменьшайте Kp до техпор, пока не начнутся заметные температурные колебания обязательно с превышением температурнойуставки.
5. Если в установившемся режиме уже наблюдаются колебания температуры, увеличивайте Kpдо тех пор, пока колебания температуры не прекратятся.
6. Запишите критическое значение пропорционального коэффициента Кр(крит.)при которомпоявляются температурные колебания (пункт 4) или прекращаются (пункт 5).
7. Измерьте и запишите период температурных колебаний τ после их появления (пункт 4) илиперед их прекращением (пункт 5).
8. Установите значения коэффициентов Kp, Ki, Kd в соответствии с таблицей.
Тангенциальный метод нахождения ПИД коэффициентов
В тангенциальном методе для нахождения ПИД коэффициентов используется криваяначального разогрева объекта. 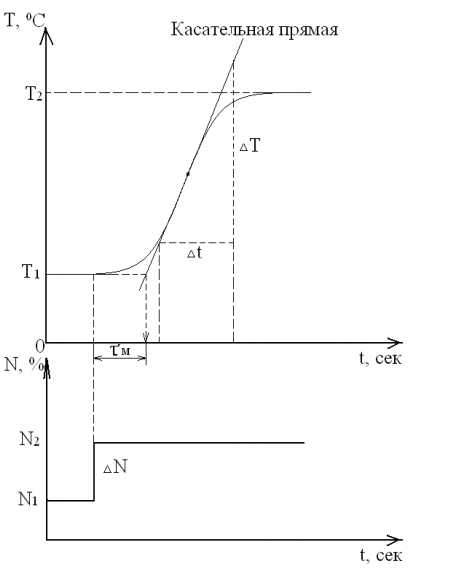
1. В режиме ручного управления контроллера задается некоторое значение мощности нанагрузке. Значение мощности должно быть таким, чтобыустановившаяся температура не превысила допустимого значения. Нужно дождаться установлениятемпературы Т1 в этом режиме и в некоторый момент времени скачком изменить значение мощности(например: на 5%). Записать процесс изменения температуры (на компьютере, на самописце или поточкам, вручную) до установления нового устоявшегося значения температуры Т2.
2. Провести касательную к полученной кривой вточке, где наклон касательной будет максимален.
3. Определить «мёртвое» время процесса какпромежуток времени, прошедший с момента изменениямощности до момента времени, определяемого точкойпересечения касательной и средней линии температурыпервого устойчивого состояния Т1.
4. Определить величину относительного наклонакасательной по формуле:
ΔT – изменение температуры в °С,
Δt – соответствующее изменение времени всекундах,
ΔN – изменение мощности в %.
5. Установите значения коэффициентов Kp, Ki, Kdв соответствии с таблицей.
Удобный метод нахождения ПИД коэффициентов для электропечейсреднего размера 
1. Назначить уставку Тус, равной температуре регулирования (или 0.7Тус, если перегрев вовремя настройки нежелателен, а он можетбыть значительным).
2. Включить позиционный режимрегулирования.
3. В установившемся режимеколебаний температуры измерить период τколебаний температуры (время междусоседними максимальными илиминимальными значениями температуры).Измерить также полный размах колебанийтемпературы ΔТ=Тmax-Тmin (разностьмаксимального и минимального значенийтемпературы).
4. Установите значениякоэффициентов Kp, Ki, Kd в соответствии с таблицей.
В данной статье приведены три метода настройки ПИД коэффициентов«вручную». В специальной технической и научной литературе можно найти и другие методы.Нахождение и настройка ПИД коэффициентов сложный и трудоёмкий процесс.
kip21.ru
принцип работы, схемы, примеры и т.д.
ПИД-регулятор — это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном.
 ПИД-регулятор
ПИД-регуляторОбратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Принцип действия ПИД-регулятора
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
Где применяется ПИД-регулятор
ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений.
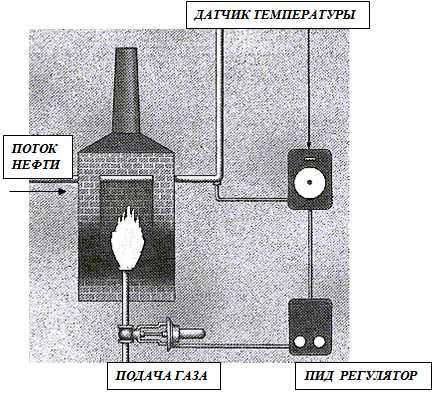 Газовая печь для подогрева нефти
Газовая печь для подогрева нефтиОдна из причин запаздывания — емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке.
www.kipiavp.ru
Особенности П, ПИ и ПИД регулирования
Особенности П, ПИ и ПИД регулирования
 Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
П регулирование. Выходная мощность прямопропорциональна ошибке регулирования. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования. Пропорциональное регулирование можно рекомендовать для малоинерционных систем с большим коэффициентом передачи. Для настройки пропорционального регулятора следует сначала установить коэффициент пропорциональности максимальным, при этом выходная мощность регулятора уменьшится до нуля. После стабилизации измеренного значения, следует установить заданное значение и постепенно уменьшать коэффициент пропорциональности, при этом ошибка регулирования будет уменьшаться. Когда в системе возникнут периодические колебания, коэффициент пропорциональности следует увеличить так, чтобы ошибка регулирования была минимальной, а периодические колебания максимально уменьшились.
ПИ регулирование. Выходная мощность равна сумме пропорциона- льной и интегральной составляющих. Чем больше коэффициент пропор- циональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности — максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования — на 20% меньше периода колебаний.
ПИД регулирование. Выходная мощность равна сумме трех состав- ляющих: пропорциональной, интегральной и дифференциальной. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая, чем больше постоянная времени дифференцирования, тем сильнее реакция системы на возмущающее воздействие. ПИД-регулятор применяется в инерционных системах с относительно малым уровнем помех измерительного канала. Достоинством ПИД регулятора является быстрый выход на режим, точное удержание заданной температуры и быстрая реакция на возмущающие воздействия. Ручная настройка ПИД является крайне сложной, поэтому рекомендуется использовать функцию автонастройки.
Автонастройка ПИД регулирования в приборах ЧАО “ТЭРА”:
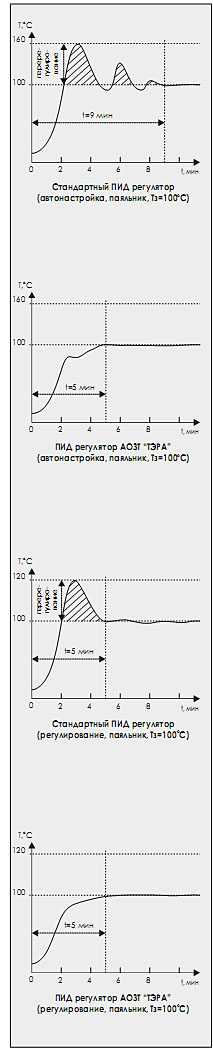
Главное, что определяет качество ПИД регулятора — это его способность точно и быстро выходить на заданную температуру, для чего у всех современных ПИД регуляторов обязательно присутствует функция автонастройки. Стандартных алгоритмов автонастройки ПИД не существуют, на практике каждый производитель применяет свой собственный алгоритм. Поэтому, пользователь, приобретая один и тот же товар под названием “ПИД регулятор” у разных производителей, на своем объекте может получить совсем разные результаты их применения. Основными достоинствами алгоритма автонастройки в ПИД регуляторах ЧАО “ТЭРА” являются:
- автонастройка и выход на регулирование без перерегулирования (у стандартных ПИД регуляторов перерегулирование может достигать 50-70% от заданной температуры, что на некоторых объектах регулирования технологически нежелательно или вообще запрещено)
- продолжительность автонастройки в среднем в 2 раза короче, чем у других производителей (крайне важная характеристика для объектов регулирования с часто изменяемыми свойствами, особенно для инерционных объектов)
Автонастройку можно производить при любом стабильном состоянии объекта регулирования. Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Автонастройку необходимо повторить, если:
- изменилась мощность исполнительного устройства
- изменились физические свойства объекта регулирования (масса, емкость, теплообмен и т.п.)
- объект регулирования заменен другим неидентичным
- при значительном изменении заданной температуры
www.ao-tera.com.ua
п, и, пи, пд, пид-регуляторы. Их достоинства и недостатки (на примере сар температуры теплообменника)
П-регулятор — Это регулятор, у которого μ пропорционально σ, т.е.μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ — положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).
Рис.2.11. Закон регулирования И-регулятора.
Достоинство:отсутствие остаточного отклонения регулируемого параметра от зад-го знч-я.
Недостаток: низкая скорость рег-я, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор – это параллельное соединение предыдущих двух регуляторов (П и И — регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
,где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И — закону.
Рис.2.12. Закон регулирования ПИ-регулятора
Регуляторы с предварением
ПД-регулятор — это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е..
Рис.2.13. Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
.
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД — закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.
studfile.net
