ПИД регулирование для чайников
Не знаю имеется ли в этом смысл но вот:Закончил специальность АТП — автоматизирование технологических процессов, расчет регуляторов является большей частью для моей специальности.
Выходная точность зависит от 2 компонентов — качества измерительной техники и качества управляющей техники.
Измерительная составляющая.
Термистор EPCOS NTC G560 100K — такой стоит у меня в принтере.
Имеет класc точности (1), при разбросе измеряемых температур 355 имеет погрешность в 3,55 градуса.
Номинальное сопротивление имеет 100 ом — это сопротивление при 23.5 градусах, замеряется скорее всего ток (так как плата имеет источник напряжение на входовыходах), в среднем типовые амперметры имеют класс точности 1,5 — это 200мА и 3мА погрешности (1 — 1,5 градуса).
В сумме имеем погрешность в 5 градусов Цельсия.
Управляющий механизм.
Немного полиграфии:
Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
И по делу:
Пропорциональная составляющая в логическом смысле нас не интересует.
Интегральная составляющая нужна для устранения статической ошибки (без нее регулируемая величина может иметь фиксированное отклонение, что-то вроде +5 градусов на все время регулирования).
Дифференциальная составляющая — это достаточно забавный способ регулирования. Для расчета значения в момент времени Т, она использует значение величины в момент времени Т+1. С математической точки зрения проблем нет, но в реальной жизни будущее значение нам не известно, и в реальности дифференциальная составляющая идет с задержкой по времени. Поясняю в момент времени Т мы исполняем расчетное изменения для момента Т-1. Дифференциальная составляющая собственно и регулирует.
Это был небольшой вводный курс в ТАУ.
Есть множество вариантов расчетов ПИД регуляторов, чаще всего используют метод Зиглера, есть уже готовые калькуляторы на матлабе и маткаде.
Если бы мы имели большую вычислительную емкость, на нашей плате, можно было бы использовать опытную схему регулирования (гигантские таблицы с входными изменениями и ответной регулировкой на них). Самый оптимум так как там можно задать воздействия куллера.
Подведу итог : Погрешность измерительных приборов и датчиков сводит на нет точность настройки ПИД регулятора, Если вы закажете высокоточные датчики сразу с преобразованием в hart протокол, rs232 или какой либо еще, и сможете настроить его на своей плате, у вас появится смысл точной (до 0,02) настройки ПИД. Самый легкий способ — пойти в вуз в котором преподают ТАУ (нефтяные, производственные направления) и заплатить преподавателю за расчет с настройкой (не обращайтесь к студентам они все под ответ подгоняют — ТАУ никогда не сходится).
Наиболее удачным вариантом для стабилизации температуры — это материал сопла с высокой теплоемкостью (будет долго нагревается но и колебаться температура будет меньше). Из опыта могу предложить изолировать сопло от ветра(хоть тем же каптоновым скотчем слоев на 20).
Надеюсь я ответил на большинство вопросов по этой теме.
так ли страшен чёрт, как его малюют? Часть 1. Одноконтурная система / Блог компании ЦИТМ Экспонента / Хабр
Эта статья открывает цикл статей, посвященных автоматизированным способам настройки ПИД-регуляторов в среде Simulink. Сегодня разберемся, как работать с приложением PID Tuner.
Введение
Наиболее популярным типом применяемых в промышленности регуляторов в системах управления замкнутыми системами можно считать ПИД-регуляторы. И если структуру и принцип действия контроллера инженеры помнят еще со студенческой скамьи, то его настройка, т.е. расчет коэффициентов регулятора, до сих пор является проблемой. Существует огромное количество литературы, как зарубежной (например, [1, 2]), так и отечественной (например, [3, 4]), где настройка регуляторов объясняется на достаточно непростом языке теории автоматического управления.
В этой серии статей будут описываться автоматизированные способы настройки ПИД-регуляторов с помощью инструментов среды Simulink, таких как:
- PID Tuner,
- Response Optimizer,
- Control System Tuner,
- Frequency Response Based PID Tuner,
- Closed-Loop PID Autotuner.
В качестве объекта системы управления будет выступать электропривод на базе двигателя постоянного тока с возбуждением от постоянных магнитов, работающий совместно с редуктором на инерционную нагрузку, со следующими параметрами:
Параметры нагрузки и редуктора:
- момент инерции нагрузки, ;
- передаточное число редуктора, .
Статьи практически не содержат математических формул, однако желательно, чтобы читатель обладал базовыми знаниями в теории автоматического управления, а также имел опыт моделирования в среде Simulink для понимания предлагаемого материала.
Модель системы
Рассмотрим линейную систему управления угловой скоростью следящего электропривода, упрощенная структурная схема которой представлена ниже.
В соответствии с приведенной структурой в среде Simulink была построена модель такой системы.
Модели электропривода (подсистема Electric actuator) и инерционной нагрузки (подсистема Load) созданы с помощью блоков библиотеки физического моделирования Simscape:
- модель электропривода,
- модель инерционной нагрузки.
Модели электропривода и нагрузки также включают подсистемы датчиков различных физических величин:
- тока, протекающего в обмотке якоря двигателя (подсистема А),
- напряжения на его обмотке (подсистема V),
- угловой скорости объекта управления (подсистема Ω).
Перед настройкой параметров ПИД-регулятора запустим модель на расчет, приняв передаточную функцию регулятора . Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.
Из анализа приведенных графиков видно, что:
- Выходная координата системы управления не достигает заданного значения, т.е. в системе присутствует статическая ошибка.
- Напряжение на обмотках двигателя достигает значения 150 В в начале моделирования, что повлечет за собой выход его из строя вследствие подачи на его обмотку напряжения больше номинального (24 В).
Пусть реакция системы на единичный импульс должна соответствовать следующим требованиям:
- перерегулирование (Overshoot) не более 10%,
- время нарастания (Rise time) менее чем 0.8 с,
- время переходного процесса (Settling time) менее чем 2 с.
Кроме того, регулятор должен ограничивать напряжение, подаваемое на обмотку двигателя, до значения напряжения питания.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.
Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
- Переходим во вкладку Output Saturation.
- Нажимаем на флаговую кнопку Limit output, в результате чего активируются поля для задания верхней (Upper limit) и нижней (Lower limit) границы диапазона выходной величины.
- Устанавливаем границы диапазона.
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В рассматриваемом случае запишем значения 24 и -24 в поля Upper limit и Lower limit соответственно, а также используем метод clamping для исключения интегрального насыщения.
Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.
В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.
Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки Show Parameters, после чего новые значения параметров автоматически изменятся в соответствующих полях в окне настройки параметров блока PID Controller.
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.
Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
Литература
- Handbook of PI and PID Controller Tuning Rules. Aidan O’Dwyer
- PID Control System Design and Automatic Tuning using MATLAB, Simulink. Wang L.
- ПИД-управление в нестрогом изложении. Карпов В.Э.
ПИД — регулятор. Основы автоматики на примере.
Всем привет. Рассмотрев в прошлой статье основу технологии построения веб-интерфейса, мы возьмем небольшую паузу с проектированием, и рассмотрим пару статей по ПИД–регулятору. Куда войдут основы автоматики, и на примере устройства синхронизации двигателей фрезерного станка на микроконтроллере, познакомимся с основными законами управления. А также рассчитаем основные коэффициенты законов для матмодели. В конце статьи выложен проект в Proteus на ATmega8.
1. Выходная величина y.
2. Входной задающий параметр u.
3. Входное возмущающее воздействие f.
На рисунке слева представлен общий вид ОУ с его параметрами. Справа наш пример представленный в протеусе в виде двигателя с энкодером, где входным задающим параметром является постоянное напряжение и в зависимости от его величины изменяется частота вращения двигателя. Выходным параметром является показания энкодера, а именно угол поворота (число импульсов за один оборот). Третий параметр — возмущающее воздействие — это воздействие со стороны внешней среды, которое нарушает правильное функционирование объекта, т.е. трение, нагрузка и т.д.
Для исключения последнего используется второй параметр, т.е. задающий. Техническое устройство, осуществляющее автоматическое управление называется управляющим устройством (УУ). А ОУ совместно с управляющим и задающим устройствами называют систему автоматического управления (САУ). Ниже структурная схема системы.
Здесь хочется сразу добавить, что ОУ может управляться по трем основным принципам:
1. Принцип разомкнутого управления – вырабатывается на основе заданного алгоритма и не контролируется другими факторами.
2. Принцип компенсации возмущений, где результат возмущения в виде корректива вносится в алгоритм управления.
3. Принцип управления по ошибке. Здесь коррективы вносятся в алгоритм управления по фактическому значению выходной величины.
Наш проект будет строится по последнему принципу управления – по ошибке. Ниже, слева структурная схема, а справа проект, где осуществляется управление по ошибке.
ЗУ — это у нас двигатель с энкодером (с левой стороны), с которого импульсы поступают в микроконтроллер. Где в свою очередь прописана матмодель ПИД-регулятора. Контроллер выступает в роли УУ. Далее ШИМ генерирует необходимый импульс и посылает его на вход второго двигателя с энкодером, который правее. (Мы с Вами уже рассматривали ШИМ-управление на AVR). Выход импульсов с которого, является выходной величиной и ошибкой в обратной связи y ос. Кнопки — это возмущающее воздействие, которыми мы произвольно добавляем импульсы ОУ. Где в свою очередь УУ должно быстро и плавно подрегулировать под угол поворота задающего устройства.
Далее САУ классифицируются по:
1. Алгоритму функционирования:
— системы стабилизации — поддержание регулируемого параметра на заданном уровне;
— программное управление – алгоритм задан в функции времени, где выходная величина изменяется во времени по заданному закону;
— следящие системы — алгоритм функционирования заранее не известен, где регулируемая величина должна воспроизводить изменение некоторой внешней величины;
— экстремальные системы — показатель качества или эффективности процесса может быть выражен в виде функции параметров системы, а сама функция имеет экстремум (максимум или минимум).
— системы оптимального управления — процесс управления ведется таким образом, что некоторая характеристика процесса была бы оптимальной;
— адаптивные системы – некоторые параметры ОУ и др. элементов системы могут изменяться.
Наш алгоритм это программное управление, где выходная величина будет результатом ПИД управления.
2. По виду дифференциальных уравнений, описываемых систему – линейные (статические характеристики всех элементов являются прямолинейными) и нелинейные (статическая характеристика является нелинейной).
3. По характеру сигналов в основных элементах — непрерывные и дискретные(в последних непрерывный входной сигнал преобразуется на выходе в последовательность импульсов).
Наш проект нелинейный и сигналы дискретные. И последнее, рассмотрим типовые законы управления, определяющие алгоритм управления в функции от ошибки управления. Под законом регулирования понимают алгоритм, в соответствии с которым управляющее устройство формирует воздействие, подаваемое на вход ОУ. Законы управления описываются передаточными функциями, которые являются одним из способов математического описания динамической системы. Вид передаточной функции управляющего устройства определяет закон управления. Различают пять основных законов управления: пропорциональный (П), интегральный (И), пропорционально –интегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционально — интегрально – дифференциальный (ПИД).
Рассмотрим каждый закон в отдельности на примере устройства синхронизации. Итак, исходные данные:
Соберем пример в Proteus. Возьмем два движка с инкрементальными энкодерами, микроконтроллер, два счетчика импульсов, а также подключим осциллограф и ЖК индикатор для отображения рассогласования (ошибки). Рассмотрение датчиков угла поворота (энкодера) выходит за пределы статьи, единственное, что нам надо знать, они предназначены для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота. Выше был представлен рисунок нашего проекта в Proteus. Ниже на рисунке пример настройки мотора с энкодером:
Где в свойствах мотора выставим:
— минимальную массу ротора EffectiveMass= 0,01;
— нагрузка ротора Load/MaxTorque % = 1, чтобы он по инерции не крутился;
— обороты ZeroLoad RPM=20;
— количество импульсов на оборот PulsesperRevolution=24.
Как видите в протеусе отдельного энкодера нет, только с двигателем. Кратко о его подключении. Один конец двигателя на землю, на второй напряжение от -12 или +12 В. И три вывода энкодера. Мы используем один как на рисунке выше. Приведенные параметры являются настроечными параметрами от которых будет зависеть динамика привода, т.е. его поведение.
П — регулятор. Одно из простых устройств и алгоритмов управления, в обратной связи, которое формирует управляющий сигнал. Выдает выходной сигнал u (t), пропорциональный входному (ошибке регулирования) e (t), с коэффициентом пропорциональности К, который вырабатывается пропорциональной частью П-регулятора в противодейтвие отклонению реглируемой величины от данного значения, в данный момент времени.
u (t)=Kр*e (t), где Kр — коэффициент усиления регулятора.
Чем больше отклонение, тем больше выход именно по данному значению. Т.е. статическая ошибка равна отклонению регулируемой величины. Здесь присутствует вероятность, что система никогда не стабилизируется на заданном значении. Увеличение коэффициента усиления увеличивает разницу между входом и выходом, при этом уменьшается статическая ошибка. Но рост этого коэффициента может привести к автоколебаниям в системе, а дальнейшее его увеличение приведет к потере устойчивости.
Обычно на практике усилительные свойства П-регулятора характеризуют следующими величинами:
— предел пропорциональности d=1/Kр — величина, обратная Kр
— предел пропорциональности, выраженный в процентах D=d*100%=100%/Kр. Показывает, на сколько процентов от своего максимального значения должен изменится входной сигнал, чтобы выходной изменился на 100%.
Автоколеба́ния — это незатухающие колебания в диссипативной ( устойчивое состояние, возникающее в неравновесной среде при условии диссипации (рассеивания) энергии, которая поступает извне) динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, т. е. непериодического внешнего воздействия.
На рисунке ниже слева нормальный процесс П-регулирования, где видно, что линейность графика прямо пропорционально уменьшению ошибки. Справа, процесс автоколебаний в системе при большом коэффициенте.
П-регулятор находит свое применение в тех же процессах, где не требуется точного поддержания заданного значения, описанных ранее, то есть в контролируемом процессе будет присутствовать статическая ошибка. Возникает данная ошибка из-за того, что выходной сигнал слишком мал для оказания существенного воздействия на поддержание системы на заданном уровне. Вполне допускается, что регулятор выведет требуемое значение, но при возникновении возмущающих воздействий, регулятор не сможет вернуть заданное значение, пока рассогласование не станет достаточно велико, чтобы выходной сигнал смог оказать достаточное воздействие. Для нашего примера такой закон не подходит. Идем далее.
И-регулятор. Что значит интегральное управление? А то, что устройство вырабатывает сигнал (u (t)), пропорциональный интегралу от ошибки регулирования (e (t)). Система при таком законе астатическая, т.е.возмущение происходит на том участке системы, который находится за интегрирующим звеном. Но при этом динамические свойства системы с И-законом обычно хуже чем у системы П-управления. Ниже представлен закон И-регулятора.
где K0 — коэффициент усиления регулятора. Скорость изменения выхода И-регулятора пропорциональна ошибке регулирования. Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.
Время изодрома Ти=1/K0 — величина, обратная K0. Также показывает за какое время выход регулятора изменится на 100% (регулирующий орган переместится из одного крайнего положения в другое) при скачкообразном изменении входного сигнала на 100%. Таким образом Ти характеризует быстродействие регулятора. С уменьшением T растет колебательность переходного процесса. При слишком малых значениях T система регулирования может перейти в неустойчивое состояние. Ниже на рисунке слева устойчивое состояние, справа — неустойчивое состояние.
В системе регулирования с И-регулятором обычно отсутствует статическая ошибка регулирования. Как правило И-регулятор не используется самостоятельно, а в составе ПИ- или ПИД- регуляторов.
ПИ-регулятор. Изодромное управление. Управляющее устройство вырабатывает суму двух сигналов — пропорционального ошибке и пропорционального интегралу от ошибки. Выходной сигнал ПИ-регулятора ( u (t) ) зависит и от ошибки регулирования ( e (t) ), и от интеграла от этой ошибки.
K1 — коэффициент усиления пропорциональной части,
K0 — коэффициент усиления интегральной части
Так как ПИ-регулятор можно рассматривать как два регулятора, соединенные параллельно, то усилительные свойства ПИ-регулятора характеризуют два параметра:
1) предел пропорциональности d=1/K1 — величина, обратная K1
2) время изодрома Ти=1/K0 — величина, обратная K0 .
Динамические свойства системы с ПИ-регулятором лучше, чем с И-законом. Изодромная система в переходном режиме приближается к системе с пропорциональным управлением. А в установившемся режиме подобна системе с интегральным управлением. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленнее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Ошибка регулирования (статическая) исключается за счет интегрального звена, которое образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности — максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования — на 20% меньше периода колебаний. Оптимальным является переходной процесс с 20% перерегулированием.
ПД-регулятор. Если нагрузка объекта изменяется часто и резко, и при этом объект имеет существенное запаздывание, то ПИ-регулятор дает неудовлетворительное качество регулирования. Тогда целесообразно в закон регулирования вводить дифференцирующую составляющую, т.е. воздействовать на регулирующий орган дополнительно по величине первой производной от изменения регулируемого параметра. Cигнал ПД-регулятора ( u (t) ) зависит от ошибки регулирования ( e (t) ) и от производной от этой ошибки (от скорости изменения ошибки).
ПД-регулятор характеризуют два параметра:
1. Предел пропорциональности d=1/K1 — величина обратная К1.
2. Постоянная времени дифференцирования (время предварения) Тд=K2. Это интервал времени между моментами достижения регулирующим органом одинакового положения при наличии дифференциальной составляющей и без нее. Параметр настройки дифференциальной составляющей. За счет дифференциальной составляющей упреждается перемещение регулирующего органа.
Дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки. Если она положительна, то ошибка растет и дифференцирующая часть вместе с пропорциональной увеличивает воздействие регулятора на объект. Если отрицательна — уменьшается воздействие на объект. Эта система регулирования имеет статическую ошибку регулирования, но быстродействие у нее выше, чем П- , И- , Пи-регуляторы. В начале переходного процесса ПД-регулятор имеет высокое усиление и, следовательно, точность, а в установившемся режиме он вырождается в П-регулятор со свойственной ему статической ошибкой. Если статическую ошибку скомпенсировать, как это делается в П-регуляторах, то возрастет ошибка в начале переходного процесса. Таким образом, ПД-регулятор по своим потребительским свойствам оказывается хуже П-регулятора, поэтому на практике он используется крайне редко. П-звено имеет положительное свойство — вносит в контур регулирования положительный фазовый сдвиг, что повышает запас устойчивости системы при малом времени предварения. Однако с увеличением этого времени растет усиление регулятора на высоких частотах, что приводит к режиму автоколебаний. Чем больше время дифференцирования, тем больше скачок в перемещении регулирующего органа.
ПИД-регулятор. Это сумма трех регуляторов П, И и Д (Пропорционально-интегрально-дифференцирующий). Выходной сигнал ПИД-регулятора ( u (t) ) зависит от ошибки регулирования ( e (t) ), от интеграла от этой ошибки и от производной от этой ошибки.
Усилительные свойства характеризуют три параметра:
1. Предел пропорциональности d=1/K1.
2. Время изодрома Ти=1/K0.
3. Время предварения Тд=K2.
Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П- , И- , и ПД- регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием.
Ниже выложен проект в Proteus на ATmega8. Где представлена выше описанная модель ПИД — регулятора.
Синхронизация двигателей станка ( Скачали: 529 чел. )
В следующей статье рассмотрим расчет основных коэффициентов законов регулирования для нашего проекта, а именно синхронизации двигателей станка. Написание матмодели для микроконтроллера и существующие варианты. А также этапы проектирования: от замысла до платы. На этом мы сегодня и остановимся. Всем пока.
Просмотрено 16227 раз.
ПИД регулятор | КИПиА Портал
Автоматическое регулирование – это автоматическое обеспечение заданных значений параметров, определяющих требуемое протекание управляемого процесса в соответствии с установленной программой.
Параметры управляемого процесса, подлежащие заданным изменениям или стабилизации — называют регулируемыми параметрами.
Устройство, обеспечивающее автоматическое поддержание заданного значения — регулируемого параметра в управляемом объекте или его изменения по определенному закону, называют регулятором.
Всякий технологический процесс характеризуется определенными физическими величинами. Для обеспечения требуемого режима работы эти величины необходимо поддерживать постоянными или изменять по тому или иному закону.
Физические величины, определяющие ход технологического процесса — называются параметрами технологического процесса.
Так параметрами технологического процесса могут быть давление, температура, уровень жидкости, концентрация вещества, расход вещества или энергии, скорость изменения какой-либо величины и т.п.
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону — называется регулируемой величиной или регулируемым параметром.
Аппарат, машина, агрегат или процесс в котором регулируются те или иные параметры технологического процесса — называются объектом регулирования или регулируемым объектом.
Значение регулируемой величины, которое оператор стремится получить в установившемся режиме от находящейся в равновесии системы регулирования при заранее заданных режимах ее работы — называется заданным значением.
Значение же регулируемой величины в рассматриваемый момент времени — называется ее мгновенным или истинным значением.
Регулятор, как часть системы автоматического регулирования САР
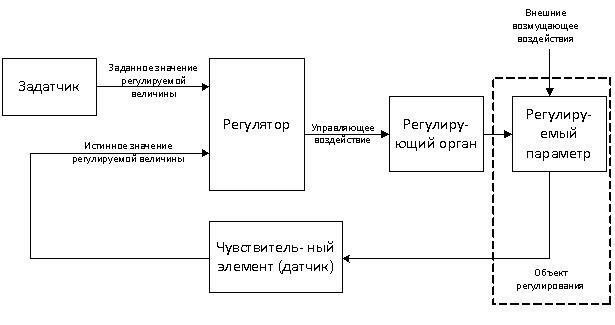
Рисунок 1.
Задатчик — устройство, предназначенное для задания значения регулируемой величины.
Чувствительный элемент (датчик) – устройство, реагирующее на изменение регулируемой величины и предназначенное для преобразования значения регулируемого параметра (температура, давление, расход, уровень) в сигнал понятный регулятору (ток, напряжение, пневмосигнал линейное перемещение).
Регулирующий орган – устройство, с помощью которого регулятор может влиять на изменение величины регулируемого параметра (клапана, шибера, пускатели, реле и т.п.). Регулирующий орган изменяет количество вещества или энергии, подводимых к объекту или отводимых от него
Внешние возмущающие воздействие — это внешние воздействия на систему, т.е. причины, вызывающие отклонения регулируемой величины от заданного значения.
Примеры внешних возмущающих воздействий:
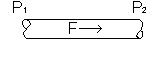
Расход продукта в трубе (F) зависит от разности давлений P1 и P2. Если изменится хотя бы одно давление, то изменится и расход.
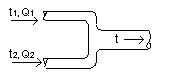
При смешении продуктов температура t зависит от температур t1 и t2 и количества Q1 и Q2 смешиваемых продуктов. При изменении одного из этих параметров приведет к изменению температуры продукта t.
На регулятор приходит два сигнала: заданное значение (от задатчика) и истинное значение (от датчика) регулируемого параметра. Разность этих сигналов называется рассогласованием или отклонением (ε). Регулятор определяет величину рассогласования и в соответствии с заложенным в него алгоритмом (см. Алгоритмы работы регуляторов) вырабатывает управляющее воздействие на регулирующий орган. Регулирующий орган влияет на значение регулируемого параметра (приоткрывая или прикрывая регулирующий клапан, увеличивает или уменьшает значение регулируемого параметра). Кроме этого на значение регулируемого параметра влияют также внешние возмущающие воздействия. Очевидно, необходимость в регулировании возникает вследствие появления внешних возмущающих воздействий, так как при их отсутствии регулируемая величина не изменялась бы.
Следовательно, задача регулирования сводится к устранению отклонения регулируемой величины от требуемого значения при любых внешних возмущениях.
Алгоритмы работы регуляторов
Алгоритм работы любого регулятора может быть основан на законах регулирования:
— пропорциональный (П)
— интегральный (И)
— пропорционально — интегральный (ПИ)
— пропорционально — дифференциальный (ПД)
— пропорционально – интегрально – дифференциальный (ПИД)
Пропорциональные регуляторы (П-регуляторы) воздействуют на регулирующий орган пропорционально отклонению регулируемой величины от заданного значения
y=kx,
где y – управляющее воздействие регулятора; x – регулируемая величина; k – коэффициент пропорциональности (передачи).
Интегральные регуляторы (И-регуляторы) воздействуют на регулирующий орган пропорционально интегралу от отклонения регулируемой величины

где kp, — коэффициент передачи регулятора по скорости.
В И-регуляторе скорость перемещения исполнительного механизма (скорость воздействия на регулирующий орган) пропорциональна отклонению регулируемой величины.
Коэффициент передачи регулятора kp численно равен скорости перемещения исполнительного механизма при отклонении регулируемой величины на единицу ее измерения.
Так как интегральный регулятор может иметь два органа настройки (например, скорости перемещения собственно интегрирующего исполнительного механизма и коэффициента механической передачи между исполнительным механизмом и регулирующим органом), то уравнение закона регулирования интегрального регулятора запишется также в виде

Величина k называется коэффициентом пропорциональности, Ти постоянная времени интегрирования.
Пропорционально – интегральный регулятор (ПИ – регулятор) представляет собой совокупность пропорционального и интегрального регуляторов
Постоянная времени Ти определяет величину составляющей регулирующего воздействия, пропорциональной интегралу от отклонения регулируемой величины x , и численно равна времени удвоения регулятора kx0, т.е. времени, в течении которого первоначальное значение выходной величины регулятора равное , удваивается в следствии действия одной только его интегральной части (рисунок 2)
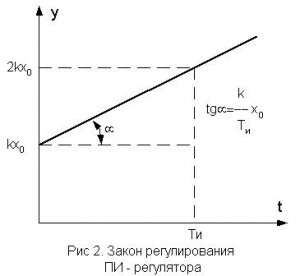
Скорость перемещения исполнительного механизма в ПИ – регуляторе пропорциональна как скорости изменения регулируемой величины, так и самому изменению регулируемой величины.
Если при настройке ПИ – регулятора установить очень большую величину постоянной времени Ти, то он превратится в П – регулятор.
Если при настройке регулятора установить очень малые значения k и Ти, но при этом так, чтобы их отношение k/Ти имело существенную величину, получим И – регулятор с коэффициентом передачи по скорости k/Ти .
Закон регулирования ПИ – регулятора представлен на рисунке 2.
Параметрами настройки ПИ – регулятора являются коэффициент пропорциональности k и постоянная времени интегрирования Ти.
Пропорционально – дифференциальные регуляторы (ПД — регуляторы) оказывают воздействие на регулирующий орган пропорционально отклонению регулируемой величины и скорости ее отклонения
Постоянная времени Тд называется постоянной времени дифференцирования. Она определяет величину составляющей регулирующего воздействия по скорости.
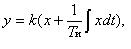
Пропорционально – интегрально – дифференциальные регуляторы (ПИД – регуляторы) воздействуют на регулирующий орган пропорционально отклонению x регулируемой величины, интегралу этого отклонения и скорости изменения регулируемой величины
При скачкообразном изменении регулируемой величины идеальный ПИД – регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на регулирующий орган; затем величина воздействия мгновенно падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ – регуляторе, постепенно начинает оказывать свое влияние интегральная составляющая регулятора.
Параметрами настройки регулятора являются:
коэффициент пропорциональности регулятора k,
постоянная времени интегрирования Ти,
постоянная времени дифференцирования Тд.
Этот регулятор по возможности настройки является более универсальным по сравнению с другими регуляторами. С его помощью можно осуществлять различные законы регулирования.
Так при Тд=0 и бесконечно большой величине Ти , получаем П – регулятор. При Тд=0, устанавливая достаточно малые значения k и Ти , но так, чтобы отношение значения k /Ти имело существенную величину, получаем И – регулятор. Так при Тд=0 и конечных значениях k и Ти имеем ПИ – регулятор. При бесконечно большой величине Ти и конечных значениях k иТд получаем ПД – регулятор.
Приборы — регуляторы
Регуляторы по роду используемого сигнала бывают механическими, пневматическими, гидравлическими, электронными.
Механические регуляторы
В механических регуляторах схемы выполнены на рычагах, пружинах и т.п. В большинстве случаев механический регулятор содержит помимо схемы регулятора еще и датчик, и регулирующий орган. Механические регуляторы являются специализированными – предназначены для регулирования только определенного технологического параметра. Так, например регулятором давления нельзя регулировать расход. Механические регуляторы не имеют информационных выходных каналов, поэтому результаты их работы нельзя вывести на компьютер оператора.
Преимущества механических регуляторов
Механические регуляторы не требуют настройки. Механические регуляторы просты в использовании, необходимо только задать необходимое значение технологического параметра, с помощью задатчика (рычажка, вращающейся рукоятки и т.п.). Механические регуляторы достаточно надежны в эксплуатации.
Пневматические регуляторы
В пневматических регуляторах схемы сделаны из мембран, сильфонов и пневматических элементов логики (УСЭППА). Носителем сигнала в пневматических регуляторах является давление воздуха от 0,2 до 1 кгс/см2 . Конструктивно пневматический регулятор представляет из себя устройство имеющее входы для подключения датчика и выход для подключения регулирующего органа. Эти регуляторы так же, как и механические, не имеют информационных выходных каналов и результаты их работы нельзя вывести на компьютер оператора.
Гидравлические регуляторы
Гидравлические регуляторы по принципу работы идентичны пневматическим, только в качестве сигнала используется давление жидкости.
Электронные регуляторы
Электронный регулятор представляют собой законченное устройство, выполненное на полупроводниковых элементах. Информация в электронном регуляторе представлена в виде ого электрического сигнала (тока или напряжения). Поэтому стало возможным вынести из электронного регулятора датчик и регулирующий орган, а в корпусе регулятора оставить только схемы регулирования. Кроме того в большинстве случаев сигналы от датчика к регулятору и от регулятора к исполнительному органу являются унифицированными (0 — 5 мА, 0 — 20 мА, 4 — 20 мА). Исходя из этого к электронным регуляторам можно подключать датчики, измеряющие разные технологические параметры и имеющие разные шкалы. Кроме этого к электронным регуляторам можно подключать регулирующие органы, имеющие разное конструктивное исполнение. Это делает электронные регулятор более универсальными в отличии от механических. В настоящее время электронные регуляторы оснащены информационными каналами, с помощью которых можно отслеживать их работу с помощью компьютера оператора.
Электронные регуляторы могут быть реализованы двумя способами:
— реализующие алгоритм управления схемотехническим путем (схемные)
— реализующие алгоритм управления программным путем (программные)
Алгоритм регулирования схемных регуляторов закладывается в них при создании на заводе и не может быть изменен в ходе эксплуатации.
С методикой настройки регуляторов вы можете ознакомиться здесь и здесь
Простой метод настройки ПИД регулятора
Есть два похода к настройке ПИД регулятора. Первый – синтез регулятора, то есть вычисление параметров регулятора на основании модели системы. Данный метод позволяет очень точно рассчитать параметры регулятора, но он требует основательного погружения в ТАУ.
Второй метод – ручной подбор параметров (коэффициентов). Это метод
Есть более «оптимизированный» метод подбора коэффициентов – метод Зиглера–Никольса.
Сразу скажу, что метод работает не для любой системы, результаты получаются не самыми оптимальными. Но, зато, метод очень простой и годится для базовой настройки регулятора в большинстве систем.
Суть метода состоит в следующем:
1. Выставляем все коэффициенты (Kp, Ki, Kd) в 0.
2. Начинаем постепенно увеличивать значение Kp и следим за реакцией системы. Нам нужно добиться, чтобы в системе начались устойчивые колебания (вызванные перерегулированием). Увеличиваем Kp, пока колебания системы не стабилизируются (перестанут затухать).
3. Запоминаем текущее значение Kp (обозначим его Ku) и замеряем период колебаний системы (Tu).
Все. Теперь используем полученные значения Ku и Tu для расчета всех параметров ПИД регулятора по формулам:
Kp = 0.6 * Ku
Ki = 2 * Kp / Tu
Kd = Kp * Tu / 8
Готово. Для дискретных регуляторов нужно еще учесть период дискретизации – T ( умножить на Ki та Т, разделить Kd на Т).
Еще раз повторюсь, ТАУ изучать нужно, синтез регуляторов рулит, описанный метод годится для базовой настройки, подходит не для всех систем и т. д. Но данный метод очень простой, и вполне годится для «бытового» уровня.
ПИД регулирование в частотных преобразователях. Настройка
Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.
Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.
Работа регулятора в обратном и прямом действии
Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида.
Настраивание ПИД-регулятора
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
- Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.
- Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Настраивание датчика на 20 миллиампер ПИД-регулированием
1. Действия в программном меню
Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры:
- Группы опциональных значений (1 уровень).
- Опциональные значения (2 уровень).
- Параметр опционального значения.
2. Настраивание характеристик электромотора и определение направления момента
Установить метод управления частотником в значении Р0-02:
- Р0-02=0 (настройка завода, пульт преобразователя).
- Р0-02=1 (входные команды внешнего управления D1-D7).
Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора):
- Мощность номинала Р1-01= установите значения.
- Напряжение номинала Р1-02= установите значения (по заводским настройкам 380 вольт).
- Ток номинала Р1-03= установите значения.
- Частота номинала Р1-04= установите значения (по заводским настройкам 50 герц).
- Обороты номинального значения Р1-05= установите значения.
После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп».
Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц.
3. Подсоединение датчика (выход на 20 миллиампер)
- Установку производить при выключенном питании частотного преобразователя.
- Напряжение датчика подсоединить к контакту «+24В», сигнал соединить с контактом «AI1», установить перемычку на контакты «COM» и «GND».
Переставить соединение «J1» в состояние «I».
4. Контроль обратной связи
- Подключите напряжение на частотный преобразователь, на экране возникнет подсветка 50 герц.
- Нажмите клавишу «сдвиг» 2 раза.
- На экране будет параметр обратной связи в интервале 0-10 (0-20 мА), зависит от настраиваемого параметра.
Связь обратного вида (4 мА).
- После подтверждения обратной связи нажмите три раза клавишу «сдвиг», появится на экране 50 герц.
- Установите наименьшее значение сигнала входа в величине Р4-13=2.00 (4 мА).
5.Как настраивать значение параметра ПИД-регулирования.
- Установите источник основной частоты Р0-03=8 (частоту определяет ПИД-регулятор).
- Поставьте значение ПИД-регулятора в значение РА-01= результат поддерживаемой величины в процентах (от 0 до 100%) от интервала датчика, РА-01= (результат поддерживаемого параметра/интервал датчика)*100%.
Пример установки значения:
Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение
РА-01=(10/16)*100%=62,5%
Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Пример использования регулирования ПИД
Данные
- Механизм вентиляторного управления.
- Характеристика градуировочная датчика давления, интервал 1000-5000 Па, ток 4-20 мА.
- Значение давления 1500 Па.
- Мощность механизма и инерционные данные вентилятора отсутствуют.
Наружные подключения
Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения.
Обратная связь
Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление).
Отградуированная характеристика датчика
Сигнал связи обратного вида в масштабе
Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа.
Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1.
Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза.
Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика.
Пример установки значения параметра PR10-01 (масштаб усиления обратной связи).
Интервал действия датчика:
-1000Ра – 5000Ра.
Наибольшее давление функционирования: 2000Ра.
Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра.
Это будет равно: 2000Ра –(-1000Ра)
5000Ра –(-1000Ра) = 50%
Если интервал действия не больше 2000Ра с датчиком, то величина параметра
PR10-01 = 1/50%=2
Формула вычисления параметра PR10-01.
Наибольший сигнал датчика: MaxVal
Наименьший сигнал датчика: MinVal
Наибольший нужный сигнал связи обратного вида MaxFBVal
Величина значения ПИД (установленная частота).
Установленную частоту можно изменять операторами наклона и перемещения опции преобразования.
Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01.
PR10-01 (наибольшая частота).
Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц).
Наименьшая частота.
Наименьшая частота не оказывает влияния на действие регулировки.
Наклон и перемещение опции преобразования.
Задать PR04-00 AVI перемещение интервала.
PR04-01 AVI полярность.
PR04-02 AVI корректировка наклона.
Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам).
Величина уставки.
Для установки величины входа интервал частоты рассчитывается 0-100%.
Установка значения уставки.
При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц.
Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра.
Интервал частоты выхода.
Верхняя граница частоты выхода при регулировке определяется формулой:
Fmax=Pr01-00хPr10-07.
ПИД-регулирование
Ускорение – замедление.
При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки.
Настраивание регулятора:
- Задать величину I для легкого отклика, без перерегулировки.
- Значение параметра для вентилятора не нужно, из-за замедления процесса.
- Задать другие значения величин.
Советы по настраиванию:
- Повышение Р разгоняет процесс, снижает ошибки.
- При большом Р появляется неустойчивость процесса.
- Снижение величины I ускоряет процесс, делает нестабильным.
- Быстрота дает снижение Р и I.
- Замедление вентилятора определяет большего значения Р.
- Задайте время ускорения и замедления наименьшим.
принцип работы, схемы, примеры и т.д.
ПИД-регулятор — это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном.
 ПИД-регулятор
ПИД-регуляторОбратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Принцип действия ПИД-регулятора
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
Где применяется ПИД-регулятор
ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений.
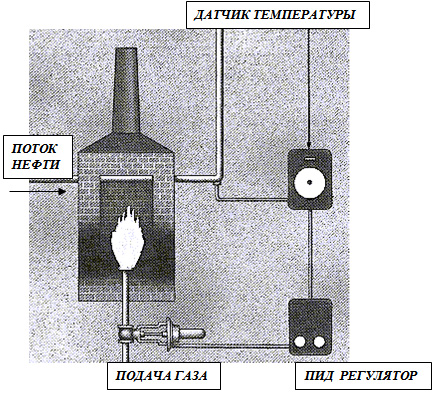 Газовая печь для подогрева нефти
Газовая печь для подогрева нефтиОдна из причин запаздывания — емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке.
Шпаргалка по закону для чайников
Юридическая помощь (некоторая бесплатная) и информация о законах по таким вопросам, как долги, мошенничество и дискриминация, доступны через широкий спектр юридических групп и государственных учреждений.
Полезные юридические организации и государственные учреждения
Если оплата счетов становится затруднительной и вам нужна помощь в переговорах о более низких ежемесячных выплатах по долгу, обратитесь в некоммерческую консультационную службу по кредитованию (большинство из них известно как Консультационная служба по потребительским кредитам), аффилированная с некоммерческим Национальным фондом кредитования Консультации (NFCC).Чтобы найти офис, связанный с NFCC, посетите сайт www.nfcc.org или позвоните по телефону 1-800-388-2227.
Если информация в вашей кредитной истории приводит к отказу в кредите, жилье, работе или страховании, запросите бесплатную копию вашего кредитного отчета в любом национальном агентстве кредитной истории, которое вызвало отказ. Три национальных кредитных агентства:
Equifax (Отдел раскрытия информации, P.O. Box 740241, Atlanta, GA 30374)
Experian (Национальный центр поддержки потребителей, П.О. Box 2002, Allen, TX 75013-2104)
TransUnion (Центр раскрытия информации о потребителях, а / я 1000, Честер, Пенсильвания, 19022
800-888-4213)
Если ипотечный кредитор отказывает вам в ссуде или продавец отказывается продать вам дом, и вы считаете, что подвергаетесь дискриминации, подайте жалобу в Департамент жилищного строительства и городского развития (HUD, перейдя на веб-сайт департамента, http://www.hud.gov/complaints/housediscrim.cfm или по телефону 800-669-9777.Подайте жалобу в течение одного года с момента происшествия.
Есть ли на вашем рабочем месте небезопасная или вредная для здоровья ситуация? Сообщите об этом своему работодателю или обратитесь в федеральное управление по охране труда (OSHA) по телефону 1-800-321-6742.
Если вы хотите подать заявление на получение пособия по социальному обеспечению — пенсионного пособия, пособия по случаю потери кормильца или инвалидности — позвоните по телефону 800-772-1213 или посетите веб-сайт Управления социального обеспечения по адресу www.ssa.gov.
Если продавец телемаркетинга свяжется с вами с предложением, которое звучит слишком хорошо, чтобы быть правдой, или если вы получили такое предложение через Интернет, ознакомьтесь с предложением, связавшись с Национальным центром информации о мошенничестве / Международным центром наблюдения за Интернетом по телефону 1-800-876 -7060.Вы можете подать жалобу, если вы стали жертвой мошенничества, на веб-сайте Центра www.fraud.org.
Горячая линия автомобильной безопасности, поддерживаемая Национальной администрацией безопасности дорожного движения, предоставляет информацию об автомобильной безопасности, а также об отзыве новых и подержанных автомобилей. Позвоните по горячей линии 1-888-327-4236 или посетите сайт www.nhtsa.gov, чтобы узнать об отзыве по вопросам безопасности, заполнить отчет о дефекте и многое другое.
Чтобы заполнить пробелы в завещании о проживании, которое имеет юридическую силу в вашем штате, обратитесь в Партнерство по уходу по адресу: www.партнерствоforcaring.org
Если вы являетесь владельцем малого бизнеса, воспользуйтесь преимуществами веб-сайта Small Business Advisor, www.business.gov, созданного совместно различными федеральными агентствами и находящегося под управлением Администрации малого бизнеса. На сайте представлена информация, которая поможет вам начать и развивать бизнес, а также упростить вам путь в лабиринте федеральных правил и положений.
Центр поддержки потребителей Федеральной торговой комиссии (FTC) предлагает широкий спектр информационных публикаций и информационных бюллетеней о законах, которыми занимается FTC.Прочтите их в Интернете или закажите бумажные копии на сайте www.ftc.gov или позвоните по телефону 1-877-382-4357.
.Контрактное право для чайников Шпаргалка
Скотт Дж. Бернхэм
Чтобы добиться успеха в договорном праве, вам необходимо знать правила и уметь анализировать фактические ситуации в свете этих правил. Эта шпаргалка знакомит с некоторыми из наиболее важных понятий договорного права, такими как заключение договоров, обещания, подлежащие исполнению из-за доверия и реституции, статус мошенничества, правило условно-досрочного освобождения и возмещение убытков за нарушение договора — и упрощает их ссылка.
Существенные элементы заключения контракта
Контракт представляет собой обмен обещаниями, имеющий юридическую силу. Для заключения контракта необходимы следующие три основных ингредиента:
Предложение: Оферент обещает адресату оферты что-то в обмен на обещание адресата сделать или не делать что-либо.
Акцепт: Адресат оферты дает оференту все, что было запрошено, например, обещание что-то делать или не делать.
Рассмотрение: Возмещение — это то, что каждая сторона принесет к столу при заключенном обмене.
Обнаружение обязательства, имеющего исковую силу
Если вы столкнулись с вопросом о заключении договора в ходе юридических сделок, сделайте следующие три шага, чтобы найти обязательство во взаимодействии сторон:
Ищите выгодный контракт — обмен, который включает три основных элемента: предложение, принятие и рассмотрение.
Ищите претензию, основанную на доверии (также известную как вексельный эстоппель ), что означает, что одна сторона разумно изменила свою позицию из-за обещания другой стороны и в результате что-то потеряла.
Ищите претензию, основанную на реституции, означающую, что одна сторона предоставила выгоду другой стороне, не намереваясь сделать это в качестве подарка или не принуждая ее к другой стороне.
Если вы обнаружите хотя бы один из этих элементов, вы столкнетесь с обязательством, подлежащим исполнению.
Определение того, подпадает ли транзакция под действие закона о мошенничестве
Чтобы определить, подпадает ли транзакция под действие закона о мошенничестве и, следовательно, должна ли она быть подтверждена в письменной форме, проверьте, соответствует ли транзакция любому из следующего:
Договор недвижимости
Договор аренды недвижимого имущества на срок более года
Договор, который по условиям не может быть исполнен в течение года с момента заключения
Соглашение об исполнении долга еще
Договор купли-продажи товаров на сумму от 500 долларов США
Если соглашение находится в рамках закона, ищите доказательства письменной формы, подписанной лицом, в отношении которого испрашивается принудительное исполнение.Если вы не найдете достаточного письменного текста, поищите исключение из закона.
Внешние доказательства: соблюдение правила условно-досрочного освобождения
Свидетельство о условно-досрочном освобождении является доказательством терминов или договоренностей, не относящихся к письменному контракту (не включенных в него). Суды следуют правилу доказательств условно-досрочного освобождения , чтобы определить, являются ли доказательства допустимыми. Вот само правило:
После того, как стороны свели свое соглашение к письменной форме, что они намерены содержать окончательное и полное заявление о своем соглашении, то доказательства условий, которые могли бы его дополнять или противоречить, не принимаются.
А вот как применить правило:
Определить, предполагали ли стороны, что письменный документ является окончательным.
Если да, могут быть представлены доказательства в дополнение к письму, но не в противоречие. Если нет, могут быть представлены доказательства, дополняющие или опровергающие написанное.
Определите, предполагали ли стороны, что письмо будет полным и окончательным.
Если да, не могут быть представлены доказательства, опровергающие или дополняющие письменные данные.Если нет, могут быть предложены доказательства в дополнение к письму, но не в противоречие.
Ограничения на возмещение убытков в результате нарушения контракта
Истцу в деле о нарушении условий контракта придется нелегко при доказательстве своей правоты. Любой ущерб, присужденный судом, ограничен следующими соображениями:
Причинная связь: Истец должен доказать, что нарушение привело к убыткам.
Достоверность: Истец должен доказать размер ущерба с разумной степенью уверенности.
Предсказуемость (правило Хэдли): Истец может взыскать только те убытки, которые ответчик на момент заключения контракта мог разумно знать, что они возникнут в результате нарушения.
Смягчение: Истец должен приложить разумные усилия, чтобы минимизировать стоимость нарушения.
Проверка условий контракта
В контрактном праве условие — это событие, которое должно произойти до наступления срока исполнения.Стороны могут утверждать, что они не нарушают договор, потому что условие, которое должно было произойти до того, как они должны были выполнить, не произошло. Условие может быть явным или подразумеваемым:
Express: Экспресс-условие, в котором обычно используются слова вроде , если в контракте указано .
Подразумевается: Подразумеваемое условие установлено судом. Самым частым подразумеваемым условием является проведение вечеринки. Таким образом, сторона может заявить, что она не обязана выступать, потому что другая сторона не выступала.
Обобщение импеданса для распространения закона Ома на конденсаторы и индукторы
- Образование
- Наука
- Электроника
- Обобщение импеданса для распространения закона Ома на конденсаторы и индукторы
Автор: Джон Сантьяго
Используйте концепцию импеданса, чтобы гернализировать закон Ома в векторной форме, чтобы вы могли применить и расширить закон на конденсаторы и катушки индуктивности. После описания импеданса вы используете векторные диаграммы, чтобы показать разность фаз между напряжением и током.Эти диаграммы показывают, как соотношение фаз между напряжением и током различается для резисторов, конденсаторов и катушек индуктивности.
Закон Ома и импеданс
Для схемы, состоящей только из резисторов, закон Ома гласит, что напряжение равно току, умноженному на сопротивление, или В = IR . Но когда вы добавляете устройства хранения в схему, связь i-v становится немного сложнее. Резисторы избавляются от энергии в виде тепла, а конденсаторы и катушки индуктивности накапливают энергию.
Конденсаторы сопротивляются изменениям напряжения, а катушки индуктивности — изменениям тока. Импеданс обеспечивает прямую зависимость между напряжением и током резисторов, конденсаторов и катушек индуктивности, когда вы анализируете цепи с векторными напряжениями или токами.
Подобно сопротивлению, вы можете думать об импедансе как о константе пропорциональности, которая связывает векторное напряжение В и векторный ток I в электрическом устройстве. В терминах закона Ома можно соотнести В , I и импеданс Z следующим образом:
В = I Z
Импеданс Z — это комплексное число:
Z = R + jX
Вот что означают действительная и мнимая части Z :
Реальная часть R — это сопротивление от резисторов .Вы никогда не вернете энергию, потерянную при протекании тока через резистор. Когда у вас есть резистор, подключенный последовательно с конденсатором, начальное напряжение конденсатора постепенно снижается до 0, если к цепи не подключена батарея.
Почему? Потому что резистор использует начальную накопленную энергию конденсатора в виде тепла, когда через цепь протекает ток. Точно так же резисторы заставляют начальный ток катушки индуктивности постепенно снижаться до 0.
Мнимая часть X — это реактивное сопротивление , которое возникает в результате воздействия конденсаторов или катушек индуктивности .Всякий раз, когда вы видите воображаемое число для импеданса, речь идет о запоминающих устройствах. Если мнимая часть импеданса отрицательна, тогда в мнимой части импеданса преобладают конденсаторы. Если он положительный, в импедансе преобладают индукторы.
Когда у вас есть конденсаторы и катушки индуктивности, импеданс меняется с частотой. Это большое дело! Зачем? Вы можете разрабатывать схемы, чтобы принимать или отклонять определенные диапазоны частот для различных приложений. Когда в этом контексте используются конденсаторы или катушки индуктивности, цепи называются фильтрами.Вы можете использовать эти фильтры для таких вещей, как создание необычных рождественских дисплеев с мигающими разноцветными огнями и танцами под музыку.
Величина, обратная импедансу Z , называется проводимостью Y :
Действительная часть G называется проводимостью , а мнимая часть B называется проводимостью .
Диаграммы и резисторы, конденсаторы и катушки индуктивности
Фазорные диаграммы объясняют различия между резисторами, конденсаторами и катушками индуктивности, где напряжение и ток либо совпадают по фазе, либо не совпадают по фазе на 90 o .Напряжение и ток резистора совпадают по фазе, потому что мгновенное изменение тока соответствует мгновенному изменению напряжения.
Но для конденсаторов напряжение не изменяется мгновенно, поэтому даже если ток изменяется мгновенно, напряжение будет отставать от тока. Для катушек индуктивности ток не изменяется мгновенно, поэтому при мгновенном изменении напряжения ток отстает от напряжения.
Вот векторные диаграммы этих трех устройств.Для резистора ток и напряжение совпадают по фазе, потому что векторное описание резистора составляет В R = I R R . Напряжение конденсатора отстает от тока на 90 o из-за — j / (ω C) , а напряжение индуктора опережает ток на 90 o из-за j ω L .
Положите закон Ома для конденсаторов в векторной форме
Для конденсатора емкостью C у вас будет следующий ток:
Поскольку производная фазора просто умножает вектор на j ω , описание вектора для конденсатора составляет
Описание вектора для конденсатора имеет форму, аналогичную закону Ома, показывая, что импеданс конденсатора равен
Ранее вы видели векторную диаграмму конденсатора.Напряжение конденсатора отстает от тока на 90 90 10 3 o 90 10 4, как вы можете видеть из формулы Эйлера:
Представьте себе мнимое число j как оператор, который поворачивает вектор на 90, o против часовой стрелки. –j вращает вектор по часовой стрелке. Также следует отметить, что j 2 поворачивает вектор на 180 o и равен –1.
Мнимая составляющая конденсатора отрицательна.По мере увеличения радианной частоты ω сопротивление конденсатора уменьшается. Поскольку частота батареи равна 0, а напряжение батареи постоянное, сопротивление конденсатора бесконечно. Конденсатор действует как разомкнутая цепь для источника постоянного напряжения.
Положите закон Ома для индукторов в векторной форме
Для индуктора с индуктивностью L напряжение
Соответствующее описание вектора для индуктора:
Импеданс индуктора
Z L = jωL
Ранее вы видели векторную диаграмму индуктора.Напряжение индуктора опережает ток на 90 o по формуле Эйлера:
Мнимая составляющая для индукторов положительна. По мере увеличения радианной частоты ω сопротивление катушки индуктивности увеличивается. Поскольку радианная частота для батареи равна 0, а батарея имеет постоянное напряжение, импеданс равен 0. Катушка индуктивности действует как короткое замыкание для источника постоянного напряжения.
Об авторе книги
Джон М.Сантьяго-младший, доктор философии, , прослужил в ВВС США (USAF) 26 лет. В течение этого времени он занимал различные руководящие должности в области технического управления программами, развития приобретения и поддержки операционных исследований. Находясь в Европе, он возглавлял более 40 международных научных и технических конференций / семинаров.
.Обеспечение соблюдения действующего соглашения по закону
- Образование
- Закон
- Обеспечение соблюдения действующего соглашения по закону
Алан Р. Ромеро
В праве собственности договоры, связанные с землей, могут действовать с землей . Это означает, что завет прикрепляется к земле, так что последующие владельцы полученной земли могут применять завет против последующих владельцев обремененной земли.
Конечно, последующие собственники могли добровольно принять уступку прав и обязанностей по контракту их предшественниками, которые первоначально заключили контракт.Но завет, действующий с землей, связывает и приносит пользу наследникам, независимо от того, согласны ли они. По сути, завет просто становится частью земли.
Если договор соответствует требованиям, традиционно предъявляемым судами, он, как говорят, соответствует в соответствии с законом и может называться настоящим соглашением . Практическое значение приведения в исполнение завета по закону состоит в том, что выигравшая сторона, обеспечивающая соблюдение завета, может взыскать убытки за нарушение, а также получить судебный приказ, конкретно обеспечивающий соблюдение завета.
(Если она хочет, чтобы другая сторона выполнила условия договора и не заботится о возмещении ущерба, она может добиваться исполнения в судебном порядке или по справедливости.)
Требования к ковенанту для работы с земельным участком, будь то полученная земля или обремененная земля, следующие:
Намерение: Первоначальные стороны предполагали, что выгода или бремя завета будет проходить с полученной или обремененной землей. То есть они предполагали, что последующие владельцы этого участка земли будут связаны заветом, получат выгоду от завета или того и другого, в зависимости от обстоятельств.
Прикосновение и беспокойство: Завет касается и касается соответствующей земли. То есть, если выгода состоит в том, чтобы работать с полученной землей, она должна быть в достаточной степени связана с полученной землей. Если бремя должно идти с отягощенной землей, оно должно быть в достаточной степени связано с обремененной землей.
Вертикальная приватность: Последующий владелец соответствующей земли, будь то земля в собственности или в обременении, унаследовал имущество первоначальной стороны по крайней мере на некоторых из соответствующих земель.
Горизонтальная приватность: Первоначальные стороны заключили договор в документе о передаче полученной или обремененной земли, или договор связан с законными интересами, которые исходные стороны имели в одной и той же земле, например, сервитут или аренда.
Всякий раз, когда первоначальная сторона участвует в действиях по обеспечению соблюдения завета, независимо от того, стремится ли она обеспечить соблюдение завета, или другая сторона пытается применить его против нее, она связана или получает выгоду в силу своего контракта.Неважно, действует ли завет с ее землей.
. Действует ли завет с землей, имеет значение только тогда, когда преемник первоначальной стороны участвует в действиях по обеспечению соблюдения завета. Таким образом, требования к завету, чтобы управлять землей, применяются отдельно к полученной земле и к обремененной земле:
Если исходная сторона, получившая выгоду, стремится обеспечить соблюдение условий завета другой стороны против кого-то, кто купил землю другой стороны: Первоначальной стороне нужно только доказать, что бремя завета распространяется на обремененную землю.
Если преемник первоначальной получавшей выгоду стороны стремится обеспечить соблюдение завета против стороны, которая первоначально заключила завет: Преемник не должен доказывать, что бремя завета лежит на обремененной земле, потому что первоначальная сторона связаны своим контрактом независимо.
Ей нужно только доказать, что льгота распространяется на землю, полученную в результате первоначальной стороны, чтобы она имела право обеспечить соблюдение условий соглашения как нынешний владелец этой земли.
Если преемник первоначальной получавшей выгоды стороны стремится обеспечить соблюдение условий завета в отношении преемника первоначальной обремененной стороны: Преемник первоначальной получавшей выгоду стороны должен доказать, что выгода распространяется на полученную землю и что бремя ложится на обремененную земля.
Об авторе книги
Алан Ромеро — профессор права и директор Центра сельского права юридического колледжа Университета Вайоминга.Он преподает право собственности и связанные с ним курсы в различных юридических школах с 1998 года.
.