Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Частотные преобразователи – это устройства, предназначенные для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С с непосредственной связью (без промежуточного звена постоянного тока).
- Практически самый высокий КПД относительно других преобразователей (98,5% и выше).
- Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая не энергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
Преобразователь частоты: описание и применение
Преобразователь частоты: вся информация об устройстве
Оглавление
Физическая основа преобразователей частоты.
Конструкция и принцип работы преобразователей частоты.
Выпрямитель.
Промежуточная цепь.
Инвертор.
Типы управления частотным преобразователем.
Интерфейсы частотных преобразователей.
ГОСТы и ТУ для частотных преобразователей.
Преимущества использования частотных преобразователей.
Недостатки преобразователей частоты.
Назначение и область применения частотных преобразователей.
Как выбрать частотный преобразователь?
Как осуществляется подключение преобразователя частоты?
Техника безопасности при подключении преобразователя частоты.
Преобразователь частоты – это статическое преобразовательное устройство, которое предназначено для регулировки частоты электрического тока. Преимущественно он используется для управления скоростью вращения двигателей асинхронного типа и позволяет повысить эффективность их работы, а также снизить изнашиваемость узлов.
Теоретические основы по работе преобразователей частоты были изложены еще в 30-х годах 20 столетия, но на тот период из-за отсутствия транзисторов и микропроцессоров практическая их реализация была невозможной. Только, когда в США, Европе и Японии были разработаны недостающие компоненты, начали появляться первые вариации частотных преобразователей. С тех пор они претерпели существенных технологических изменений, но принцип их работы до сих пор строится на одних и тех же физических законах.
Работа преобразователей частоты строится на следующей формуле:
Из данного выражения сразу становится ясно, что при изменении частоты входного напряжения, которое в формуле обозначено, как f1, будет меняться и угловая скорость магнитного поля статора, которая определяет и скорость вращения самого статора. Такой эффект может быть достигнут только в случае, если величина p (количество пар полюсов) будет оставаться неизменной.
Что же это дает нам? Во-первых, возможность плавного регулирования скорости вращения. Особенно актуально это на пиковых нагрузках при запуске. Во-вторых, такая зависимость позволяет повысить скольжение двигателя асинхронного типа, увеличив его КПД.
Стоит также отметить, что такие характеристики, как коэффициент мощности, КПД, коэффициент перегрузочной способности принимают высокие значения именно при одновременном регулировании частоты и напряжения тока. Закономерности изменения этих параметров напрямую зависят от нагрузочного момента, который может принимать следующий характер:
- Постоянный. При таком характере нагрузочного момента напряжение на статоре будет прямо пропорционально зависеть от частоты:
- Вентиляторный. В данном случае напряжение будет пропорционально частоте в квадрате:
- Обратно пропорциональный. В данном случае формула будет иметь следующий вид:
Вышеописанные выкладки подтверждают, что при одновременной регулировке частоты и напряжения с помощью частотного преобразователя можно обеспечить плавное и равномерное изменение скорости вращения вала.
Если рассматривать общую конструкцию преобразователей частоты, то в ней стоит выделить два основных блока компонентов:
- Управления.
- Электропреобразований.
Первый блок обычно представлен микропроцессором, который воспринимает команды от внешних систем управления и интерфейсов и передает непосредственно на электропреобразовательные элементы.
Блок электропреобразований является основным рабочим механизмом всей системы. Именно он отвечает за прием входного тока и преобразование его параметров до нужных значений, установленных оператором через управляющий блок. В состав данного блока входят следующие элементы:
- Выпрямитель.
- Промежуточная цепь.
- Инвертор.
Поговорим о каждом более подробно.
Данный компонент предназначен для формирования пульсирующего напряжения в одно- или трехфазных сетях переменного тока. Выпрямители обычно строятся либо на диодах, либо на тиристорах. В первом случае они считаются неуправляемыми, а во втором управляемыми.
- Неуправляемые выпрямители. В их конструкции используется две группы диодов, которые подсоединены к различным клеммам и проводят различные напряжения – положительное и отрицательное. В конечном счете выходное напряжение равняется разности напряжений на этих группах диодов и в математическом выражении имеет следующее значение: 1,35*входное напряжение сети.
- Управляемые выпрямители. В конструкции таких выпрямителей вместо диодов используются тиристоры. На них может подаваться входящий сигнал a, который стимулирует задержку тока, выражаемую в градусах. В случаях, когда значение данного параметра колеблется в пределах 0-90 градусов, тиристоры играют роль выпрямителей, а когда в 90-300 градусов – инвертора. Выходное значение постоянного напряжения составляет: 1,35* входное напряжение сети*cos α.
Промежуточная цепь выполняет роль своеобразного хранилища, из которого электродвигатель получает энергию через инвертор. В зависимости от комбинации инвертора и выпрямителя промежуточная цепь может иметь одну из следующих формаций:
- Инвертор-источник питания. В данном случае промежуточная цепь имеет в составе мощную индуктивную катушку, которая преобразует напряжение выпрямителя в изменяющийся постоянный ток. Само напряжение двигателя определяется по нагрузке. Такой тип цепей может работать только с управляемыми выпрямителями.
- Инверторы — источники напряжения. В данном случае в промежуточной цепи используется фильтр, в состав которого входит конденсатор. Он сглаживает напряжение, поступающее от выпрямителя. Такие цепи способны работать с любыми типами выпрямителей.
- Цепь изменяющегося постоянного напряжения. В данном случае перед фильтром устанавливается прерыватель, в котором имеется транзисторы, выключающий и включающий подачу напряжения от выпрямителя. В данном случае фильтр обеспечивает сглаживает прямоугольные напряжения после прерывателя, а также поддерживает постоянное напряжение на заданной частоте.
Инвертор является последним звеном в частотном преобразователе перед самим электродвигателем. Именно он окончательно преобразует напряжение в нужный для работы вид. Вследствие вышеописанных преобразований, происходящих на выпрямителе и промежуточной цепи, инвертор получает:
- Постоянный ток изменяющегося характера.
- Изменяющееся или неизменное напряжение постоянного тока.
Собственно, сам инвертор и обеспечивает подачу напряжения необходимой частоты. Если на него поступает изменяемое напряжение или ток, то он создает только нужную частоту. Если же неизменяемое, то он создают и нужную частоту, и нужное напряжение.
Обычно в конструкции инверторов используются высокочастотные транзисторы, частота коммутации которых находится в диапазоне от 300 до 20 кГц.
Существует два основным метода управления электродвигателями с использованием частотных преобразователей:
- Скалярный.
- Векторный.
Асинхронные системы управления на сегодняшний день считаются самыми распространенными. Они используются в приводах вентиляторов, насосов, компрессоров и т.д. Главный принцип, который лежит в основе скалярного управления, состоит в изменении частоты и амплитуды напряжения по закону U/fn = const, где n всегда больше 1. Соответственно, меняя напряжение U, мы изменяем и частоту f в степени n. При этом степенное значение определяется в зависимости от особенностей самого частотного преобразователя и его назначения.
Сама методика скалярного управления достаточно проста с точки зрения ее технической реализации, но при этом имеет два существенных недостатка. Первый заключается в том, что без дополнительного датчика скорости вы не сможете регулировать скорость вала, ведь она напрямую зависит от нагрузки. Данную проблему можно решить простым приобретение датчика.
Но существует еще один недостаток – невозможность регулировки момента. Казалось бы, данная проблема тоже решается покупкой датчика момента. Но он достаточно дорог, да и само управление получится весьма спорным. К тому же, совместно управлять и скоростью и моментом при скалярном типе управления невозможно.
Векторный тип управления подразумевает, что в саму систему закладывается математическая модель работы электродвигателя, что позволяет на программном уровне по входным параметрам рассчитывать и скорость, и момент. При этом обязательно только наличие датчика, который будет снимать показатели тока фаз статора.
Существует два класса векторных систем управления:
- Без датчиков скорости.
- С датчиками скорости.
Их использование в тех или иных случаях определяется в зависимости от условий эксплуатации двигателя. Если диапазон изменения скорости вращения вала не превышает 1:100, а требования по точности не более 0,5%, то отлично подойдет система без датчиков.
Если же диапазон изменения скорости составляет 1:1000, а требования по точности установлены на уровне до 0,02%, то лучше использовать системы управления с датчиками.
Стоит отметить, что у векторного управления также есть свои недостатки. Например, для их настройки требуются большие вычислительные мощности и знание рабочих параметров двигателей. Кроме того, векторное управление не может использоваться там, где в преобразователю частот подключено сразу несколько рабочих агрегатов – там целесообразно применять скалярные системы.
В конструкции большинства современных частотных преобразователей имеется целый набор различных интерфейсов, через которые можно осуществлять подключение стороннего оборудования или синхронизировать несколько частотников. Рассмотрим основные входы и выходы, используемые в подобных устройствах:
- Аналоговый вход. Данный интерфейс служит для приема стандартного аналогового сигнала производственного диапазона, который располагается в пределах от 0(4) до 20мА или от 0 до 10В. Через него можно осуществлять регулировку работы частотного преобразователя. Например, минимальная величина аналогового сигнала может сигнализировать устройству о том, что выходная частота, поступающая на двигатель, должна иметь свое минимальное значение и наоборот – максимальная должна соответствовать максимальной.
- Аналоговый выход. Данный выход по своему функционалу аналогичен входу. Только в этом случае он передает информацию о частоте, поступающей на двигатель, через аналоговый сигнал определенной величины, что позволяет контролировать режим работы.
- Дискретный вход. Данный вход способен принимать скачкообразные сигналы. Как и аналоговый вход, он способен изменять параметры. Например, минимальный сигнал может соответствовать мгновенной минимальной выходной частоте преобразователи, а максимальный – максимальной выходной частоте.
- Дискретный выход. Данный выход позволяет выполнять аналогичные входу операции только в обратном порядке.
- RS-485. Данный интерфейс является полноценным входом, который позволяет в полной мере взаимодействовать с преобразователем частот, например, через компьютер. С его использованием можно настраивать рабочие параметры оборудования, отслеживать его состояние и т.д. В интерфейсе RS-485 используется особенный дифференциальный сигнал, который позволяет проводить линии длиной до 120 метров. Таким образом, можно установить преобразователь частот на производственном участке, а управление им осуществлять в командной рубке, удаленной от рабочего пространства.
Кроме того, в частотных преобразователях могут использоваться и другие интерфейсы. Все зависит от конкретной модели устройства и его производителя.
Собственно, как и любые технические средства, используемые на производственных предприятиях и в оборудовании, частотные преобразователи и требования к ним регламентируются определенной технической базой, а именно следующими документами:
- Правила устройства электроустановок 7-е издание.
- ГОСТ 24607-88 Преобразователи частоты.
- ГОСТ 13109-97 Совместимость технических средств электромагнитная.
- ГОСТ Р 51137-98 Электроприводы регулируемые асинхронные.
- ФЗ 261 Федеральный закон об энергосбережении и энергоэффективности.
- ТР ТС 00_2011 Электромагнитная совместимость технических средств.
- ГОСТ26284-84 — Преобразователи электроэнергии полупроводниковые. Условные обозначения.
- ГОСТ23414-84 — Преобразователи электроэнергии полупроводниковые. Термины и определения.
- ГОСТ 4.139-85 Система показателей качества продукции. Преобразователи электроэнергии полупроводниковые. Номенклатура показателей.
В соответствии с описанными в этих документах требованиями должен осуществлять выбор конкретной модели устройства, а также ее установка и отладка.
Частотные преобразователи нашли широкое применение в самых различных производственных нишах и оборудовании. Столь высокий спрос на подобные устройства обусловлен следующими преимуществами их использования:
- Уменьшение тока запуска. В случае запуска электродвигателя с помощью прямых пускателей наблюдается резкое увеличение тока, значения которого превышают номинальное в 7-15 раз. Это негативно сказывается на электропривод и может привести к пробою изоляции, выгоранию контактов и ряду других негативных последствий. Кроме того, такой способ запуска оказывает влияние и на механические компоненты системы. В момент пуска рабочие узлы двигателя подвергаются высоким нагрузкам, что приводит к их более быстрому износу. Благодаря частотным преобразователям можно существенно снизить пусковые нагрузки на электродвигатель, продлив срок его безремонтной эксплуатации.
- Экономичность. Как правило, двигатели, поддерживающие работу вентиляционных и насосных систем, всегда работают на одной и той же частоте, а регулировка давления и других рабочих показателей осуществляется с помощью арматуры (шиберы, заслонки и т.д.). Это приводит к нерациональному расходованию электроэнергии. В случае использования преобразователей частот можно осуществлять настройку рабочих параметров системы за счет корректировки интенсивности работы двигателя. Это дает возможность более рационально расходовать его ресурсы.
- Повышенная адаптивность. При использовании частотных преобразователей можно конструировать автоматизированные системы, которые по установленным алгоритмам будут корректировать работу оборудования. Это снижает трудозатраты производственных процессов и позволяет сделать их более точными за счет исключения человеческого фактора.
- Ремонтопригодность. В случае поломки преобразователя частот вы можете отдать его в мастерскую, где мастер заменит вышедшие из строя детали. Правда, это касается только электропреобразующего блока – с блоками управления все намного сложнее и они более требовательны с точки зрения восстановления.
Частотные преобразователи являются оптимальным решением для организации самых различных производственных процессов и отладки рабочего оборудования, на базе которого используются электромоторы.
Частотные преобразователи также имеют и свои недостатки. К ним следует отнести:
- Дороговизна. Частотные преобразователи являются самым дорогим преобразовательным оборудованием. Правда, данный недостаток весьма относителен с учетом того, что такие устройства позволяют продлить срок эксплуатации электродвигателей, а также увеличить срок их безремонтной эксплуатации.
- Ограниченность. Далеко не все старые электродвигатели способны работать в связке с частотным преобразователем. Даже, если это возможно с технической точки зрения, то эксплуатационного ресурса устаревших моделей может просто не хватить на постоянные скачки частоты и скорости вращения вала.
- Сложность настройки и подключения. Преобразователь частот достаточно сложно установить самостоятельно, поэтому для выполнения подобных работ часто приходится привлекать сторонних специалистов, а это в свою очередь влечет определенные финансовые затраты.
Если сопоставить недостатки и преимущества частотных преобразователей, то они, все равно, выглядят более эффективными даже на фоне других преобразовательных устройств. Именно это и делает их особенно популярными в производственных отраслях, где они используются практически повсеместно.
Частотные преобразователи уже много лет используются в строительстве электромеханических устройств и агрегатов. Они позволяют модулировать частоту тока, что в свою очередь делает возможной точную регулировку скорости вращения двигателя. На сегодняшний день частотники используются во многих отраслях деятельности. Мы рассмотрим лишь некоторые из них:
- Пищевая промышленность. Частотные преобразователи часто используются для регулировки работы фасовочных линий. Они позволяют настроить скорость подачи продукта и движения ленты в соответствии с пропускной способностью самого упаковочного станка. Кроме того, их часто используют в крупных миксерных агрегатах, вентиляционных системах и т.д.
- Механизация производственного оборудования. Без преобразователей частоты не обходятся конвейерные ленты, покрасочные и моющие станки, прессы, штамповочное оборудование и т.д. Такие устройства позволяют контролировать скорость рабочих процессов, снижая вероятность повреждения продукции и повышая качество конечного результата.
- Медицина. Относительно любого медицинского оборудования всегда устанавливаются самые высокие технические требования, добиться соответствия которым невозможно без использования управляемых электродвигателей в связке с частотником. Они устанавливаются в различных системах жизнеобеспечения, подъемных механизмах кроватей и т.д.
- Подъемно-транспортное обеспечение. Лифты, подъемные краны, подъемники – все эти средства уже давно используют преобразователи частоты. Они позволяют точно контролировать скорость выполнения различных операций, а также продлевать срок безремонтной эксплуатации оборудования.
Перечислять области применения частотных преобразователей можно бесконечно, ведь их можно использовать в любом оборудовании, использующем электродвигатели.
Следует выделить несколько основных параметров, на которые нужно обращать внимание при выборе частотного преобразователя:
- Мощность. Данный параметр частотного преобразователя должен соответствовать мощности двигателя, с которым он будет использоваться. Следует выбирать устройство, мощность которого будет соответствовать номинальному току. Покупать частотный преобразователь с очень завышенными характеристиками попросту бессмысленно, ведь он обойдется намного дороже, да и с наладкой могут возникнуть проблемы.
- Тип нагрузки. Тут все зависит от того, как осуществляется работа агрегата, к которому будет подключен частотный преобразователь. Например, при вентиляторных нагрузках не бывает перегрузок, а в случае с работой пресса – ток может превышать номинальные значения на 60 и более процентов. Соответственно, необходимо учитывать это при выборе и оставлять определенный запас «хода».
- Тип охлаждения двигателя. Двигатели могут оснащаться принудительными системами охлаждения либо иметь самообдув. Во втором случае к крыльчатке ротора прикрепляются специальные лопасти, которые вращаются вместе с ним и обдувают двигатель. Соответственно, нормальная степень обдува в данном случае напрямую зависит от частоты вращения. Если двигатель продолжительное время будет работать на пониженной частоте, то это может привести к перегреву. Соответственно, лучше позаботиться о дополнительном охлаждении, если изменение частоты будет больше 10% от номинального значения.
- Входное напряжение. Данный показатель определяет, при каком напряжении способен работать преобразователь частот. Тут мало знать, что в сети напряжение обычно составляет около 380 В. Часто происходят скачки в диапазоне +-30%. Кроме того, в сетях, куда подключено большое количество силового оборудования, часто случаются выбросы в 1 кВ. Соответственно, чем шире диапазон рабочих напряжений у преобразователя частот, тем надежнее он будет работать.
- Способ торможения. Остановка двигателя может осуществляться либо инверторным мостом, либо электродинамическим способом. Первый метод больше подходит для точного и быстрого торможения, а второй – в механизмах с частым торможением либо при необходимости постепенной остановки. На это обязательно следует обратить внимание.
- Окружающая среда и защита. Обычно в паспорте преобразователя частоты указаны условия, при которых должно использоваться устройство. Например, влагозащищенные модели соответствуют стандарту IP 54 – они устойчивы к воздействию влаги и могут использоваться в помещениях с паровыми испарениями и повышенной влажностью.
- Тип управления и интерфейсы. Обязательно необходимо обратить внимание на наличие подходящих для подключения разъемов, а также возможностей правления – некоторые модели предназначены для монтажа на месте, а другие – в отдельной рубке управления.
Если вы никогда не работали с преобразователями частоты, лучше обратиться за консультацией к специалисту.
Если рассмотреть монтаж преобразователя частоты схематически, то вес процесс сводиться к соединению контактов самого устройства, электродвигателя и управляющего блока-предохранителя. Достаточно соединить провода всех элементом, подключить двигатель к сети и запустить его.
На первый взгляд, ничего сложного в этом нет, но, на самом деле, процедура монтажа имеет некоторые свои нюансы:
- Очень важно, чтобы в цепи между самим частотником и источником питания был установлен предохранитель. Он позволит своевременно отключать устройства в случае перепадов напряжения, сохраняя их работоспособность. Примечательно, что при подключении к трехфазной сети, необходимо, чтобы сам предохранитель также был трехфазным, но имел общий рычаг для отключения. Это даст возможность отключать питание сразу на всех фазах даже, если только на одной случилось короткое замыкание или перегрузка. Если преобразователь подключается к однофазной сети, то и предохранитель должен быть однофазным. В данном случае при расчетах необходимо учитывать ток только одной фазы, но умноженный на 3. Всегда стоит помнить, что в инструкции практически к любому преобразователю указаны требования и нормы по его установке. С ними необходимо ознакомиться еще до начала работ.
- Фазовые выходы частотного преобразователя подключаются к контактам самого электродвигателя. При этом в зависимости от напряжения частотника обмотки двигателя могут иметь формацию «звезда» или «треугольник». Обычно на корпусе двигателя указано два значения напряжения. Если частотник соответствует меньшему, то обмотки соединяются «звездой», если большему – «треугольником». Вся эта информация обычно пропечатывается в инструкции.
- В комплекте практически с каждым преобразователем частоты прилагается выносной пульт управления. Он не является обязательным элементов цепи, ведь на самом устройстве также есть свои элементы управления, но позволяют существенно упростить работу с оборудованием. Пульт можно монтировать на любом расстоянии от частотника. Обычно делается это следующим образом: преобразователи частоты, которые имеют низкую степень защиты располагаются подальше от двигателя, а сам пульт выносится непосредственно к рабочему месту около оборудования.
Не менее важным этапом установки частотного преобразователя является его тестовый запуск. Он осуществляет по следующей схеме:
- После подключения всех элементов системы (предохранитель, панель управления, частотник, двигатель) необходимо перевести рукоять на пульте управления в активное положение на несколько градусов.
- Тумблеры предохранителя переключить в положение «ВКЛ». После этого на частотном преобразователи должны загореться световые индикаторы, которые будут сигнализировать, что оборудование подключено правильно, а двигатель должен начать медленно вращаться.
- Если вал двигателя начал вращаться в другу от нужной сторону, необходимо перепрограммировать сам частотный преобразователь на реверсное движение. Практически все современные устройства поддерживают такую функцию.
- Постепенно передвигайте рукоять управления и следите за работой двигателя – частота вращения вала должна расти по мере того, как вы передвигаете рукоять.
Если при тестовом запуске никаких проблем обнаружено не было, значит, вы сделали все правильно и система может включаться в рабочий процесс.
Следует выделить несколько основных правил безопасности, о которых нужно помнить при выполнении работ по подключению частотных преобразователей:
- Категорически запрещается касаться любой частью тела к токоведущим элементам цепи. Это может нанести ущерб вашему здоровью или даже лишить жизни. Перед началом работ рекомендуется полностью обесточить оборудование и использовать специальные электромонтажные инструменты с защитой от ударов током.
- Стоит помнить, что даже после угасания индикаторов на устройстве в цепи может оставаться напряжение. Чтобы избежать ударов током при работе с системами до 7 кВт необходимо выждать 5 минут до начала работ, с агрегатами свыше 7 кВт – 15 минут. Этого времени должно хватить, чтобы все конденсаторы в цепи разрядились.
- Заземление является неотъемлемой частью любой электрической цепи, включая цепь частотный преобразователь-двигатель. Оно должно устанавливаться в виде отдельного кабеля и ни в коем случае не может присоединяться к нулевой шине.
- Стоит помнить, что отключения частотного преобразователя не гарантирует, что в других узлах сети не осталось напряжения, поэтому перед ремонтом или обслуживанием необходимо полностью отключить цепь от сети.
Выполнять работы по подключению преобразователей частоты могут только квалифицированные специалисты, имеющие соответствующую подготовку, а также необходимые допуски.
Рекомендации по покупке частотных преобразователей
Покупка частотного преобразователя является достаточно ответственным делом, ведь подобные устройства стоят достаточно дорого и на них возлагаются очень серьезные задачи, поэтому некорректность работы оборудования может привести не только к финансовым потерям, но и остановке всего производства или других работ.
Перед тем как покупать преобразователь частот, необходимо:
- Определиться с параметрами, которые будут соответствовать вашему электродвигателю.
- Составить рабочую схему, по которой будет осуществляться монтаж и подключение оборудования.
- Выбрать дополнительные модели, которые будут подключаться к самому преобразователю.
- Закупить все необходимые кабеля, крепления и каркасы, необходимые для установки.
- Подготовить рабочую площадку для монтажа. Возможно, нужно будет оборудовать дополнительные источники питания или реорганизовать производственное оборудование для возможности его подключения к преобразователю.
Многие в связи с дороговизной преобразователей частот покупают б/у устройства. Такой подход более рискованный, чем покупка новой продукции, но позволяет сэкономить некоторую сумму денег. Если вы также решили купить бывший в употреблении преобразователь, то стоит его тщательно проверять не только по внешним признакам, но и в работе. Лучше всего, если продавец не будет демонтировать его со своего объекта и сможет продемонстрировать его работоспособность на практике.
Опять же, если вы никогда не сталкивались с покупкой преобразователя частоты, лучше поручить это дело профессионалу, который сможет подобрать для вас подходящую модель и помочь с ее установкой.
Ротор электродвигателя начинает свое вращение с помощью электромагнитных сил от вращающегося магнитного поля, вызванного обмоткой якоря. Число оборотов определяется частотой тока в сети. Стандартное значение частоты тока составляет 50 герц. Это означает, что 50 периодов колебаний совершается за 1 секунду. В минуту число колебаний составит 50 х 60 = 3000. Значит, ротор будет вращаться 3000 оборотов в минуту.
Если научиться изменять частоту тока, то появится возможность регулировки скорости двигателя. Именно по этому принципу действуют частотные преобразователи.
Современное исполнение преобразователей частоты выглядит в виде высокотехнологичного устройства, состоящего из полупроводниковых приборов, совместно с микроконтроллером электронной системы. С помощью этой системы управления изменяются важные параметры электродвигателя, например, число оборотов.
Изменить скорость привода можно и с помощью механического редуктора шестеренчатого типа, либо на основе вариатора. Но такие механизмы имеют громоздкую конструкцию, их нужно обслуживать. С использованием частотника (инвертора) снижается расход на техническое обслуживание, повышается функциональность привода механизма.
Виды
По конструктивным особенностям частотные преобразователи делятся:
- Индукционные.
- Электронные.
Электродвигатели асинхронного типа с фазным ротором, подключенные в режим генератора, представляют подобие индукционного частотного преобразователя. Они имеют малые КПД и эффективность. В связи с этим такие виды преобразователей не нашли популярности в использовании.
Электронные виды частотников дают возможность плавного изменения оборотов электродвигателей.
При этом реализуются два возможных принципа управления:
- По определенной зависимости скорости от частоты тока.
- По способу векторного управления.
Первый принцип самый простой, но не совершенный. Второй принцип применяется для точного изменения оборотов двигателя.
Конструктивные особенности
Рис. 1
Частотные преобразователи имеют в составе основные модули:
- Выпрямитель.
- Фильтр напряжения.
- Инверторный узел.
- Микропроцессорная система.
Все модули связаны между собой. Действие выходного каскада (инвертора) контролирует блок управления, с помощью которого меняются свойства переменного тока. Частотный преобразователь для электромотора имеет свои особенности. В его состав входит несколько защит, управление которыми осуществляется микроконтроллером. Например, проверяется температура полупроводников, работает защита от превышения тока и короткого замыкания. Частотник подключается к сети питания через устройства защиты. Для запуска электродвигателя не нужен магнитный пускатель.
Выпрямитель
Это первый модуль, по которому проходит ток. Он преобразует переменный ток в постоянный, благодаря полупроводниковым диодам. Особенностью частотника является возможность его питания от однофазной сети. Разница в конструкции состоит в разных типах выпрямителей.
Если мы говорим про однофазный частотник для двигателя, то нужно использовать в выпрямителе четыре диода по мостовой схеме. При трехфазном питании выбирается схема из шести диодов. В итоге получается выпрямление переменного тока, появляется два полюса: плюс и минус.
Фильтр напряжения
Из выпрямителя выходит постоянное напряжение, которое имеет значительные пульсации, заимствованные от переменного тока. Для их сглаживания используют такие элементы, как электролитический конденсатор и катушка индуктивности.
Катушка имеет много витков, и обладает реактивным сопротивлением. Это дает возможность сглаживать импульсы тока. Конденсатор, подключенный к двум полюсам, имеет интересные характеристики. При прохождении постоянного тока он в силу закона Киргофа должен быть заменен обрывом, как будто между полюсами ничего нет. При прохождении переменного тока он должен быть проводником, то есть, не иметь сопротивления. В результате доля переменного тока замыкается и исчезает.
Инверторный модуль
Это узел, имеющий наибольшую важность в преобразователе частоты. Он изменяет параметры тока выхода, состоит из шести транзисторов. Для каждой фазы подключены по два транзистора. В каскаде инвертора применяются современные транзисторы IGBT.
Если изготавливать частотные преобразователи своими руками, то необходимо выбирать элементы конструкции, исходя из мощности потребления. Поэтому нужно сразу определить тип электродвигателя, который будет питаться от частотника.
Микропроцессорная система
В самодельной конструкции не получится добиться таких параметров, имеющихся у заводских моделей, так как в домашних условиях сделать управляющий модуль сложно. Дело не в пайке деталей, а в создании программы для микроконтроллера. Простой способ – это сделать управляющий блок, которым можно регулировать обороты двигателя, осуществлять реверс, защищать двигатель от перегрева и перегрузки по току.
Чтобы изменить обороты мотора, нужно применить переменное сопротивление, подключенное к вводу микроконтроллера. Это устройство подает сигнал на микросхему, которая производит анализ изменения напряжения и сравнивает его с эталоном (5 вольт). Система действует по алгоритму, который создается до начала создания программы. По нему действует микропроцессорная система.
Приобрели большую популярность управляющие модули Siemens. Частотные преобразователи этой фирмы надежны, могут применяться для любых электродвигателей.
Принцип действия
Основа работы инвертора состоит в двойном изменении формы электрического тока.
Напряжение подается на блок выпрямления с мощными диодами. Они удаляют гармонические колебания, однако оставляют импульсы сигнала. Чтобы их удалить, подключен конденсатор с катушкой индуктивности, образующие фильтр, который стабилизирует форму напряжения.
Далее, сигнал идет на частотный преобразователь. Он состоит из шести мощных транзисторов с диодами, защищающими от пробоя напряжения. Ранее для таких целей применялись тиристоры, но они не обладали таким быстродействием, и создавали помехи.
Чтобы подключить режим замедления мотора, в схему устанавливают транзистор управления с резистором, который рассеивает энергию. Такой способ дает возможность удалять образуемое двигателем напряжение, чтобы защитить емкости фильтра от выхода из строя вследствие перезарядки.
Метод управления векторного типа частотой инвертора дает возможность создания схемы, которая автоматически регулирует сигнал. Для этого применяется управляющая система:
- Амплитудная.
- Широтно-импульсная.
Амплитудная регулировка работает на изменении напряжения входа, а ШИМ – порядка действия переключений транзисторов при постоянном напряжении на входе.
При регулировании ШИМ образуется период модуляции, когда обмотка якоря подключается по очереди к выводам выпрямителя. Так как тактовая частота генератора высокая и находится в интервале 2-15 килогерц, то в обмотке мотора, имеющего индуктивность, осуществляется сглаживание напряжения до нормальной синусоиды.
Принцип подключения ключей на транзисторах
Каждый из транзисторов включается по встречно-параллельной схеме к диоду (Рис. 1). Через цепь транзистора протекает активный ток электродвигателя, реактивная часть поступает на диоды.
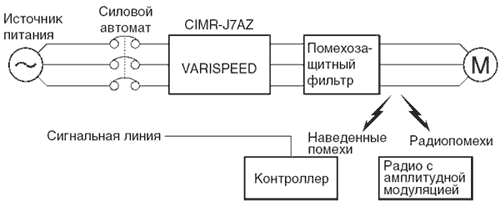
Чтобы исключить влияние помех на действие инвертора и электродвигателя, в схему подключают фильтр, который удаляет:
- Радиопомехи.
- Помехи от электрооборудования.
Об их образовании дает сигнал контроллер, чтобы снизить помехи, применяются экранированные провода от двигателя до выхода инвертора.
Чтобы оптимизировать точность функционирования асинхронных двигателей, в цепь управления инверторов подключают:
- Ввод связи.
- Контроллер.
- Карта памяти.
- Программа.
- Дисплей.
- Тормозной прерыватель с фильтром.
- Охлаждение схемы вентилятором.
- Прогрев двигателя.
Схемы подключения
Частотные преобразователи служат для работы в 1-фазных и 3-фазных сетях. Но если имеются промышленные источники питания на 220 вольт постоянного тока, то инверторы также можно подключать к ним.
Частотные преобразователи для 3-фазной сети рассчитаны на 380 вольт, их подают на мотор. 1-фазные частотники работают от сети 220 вольт, выдают на выходе 3 фазы. Частотник может подключаться к электродвигателю по схеме звезды или треугольника.
Обмотки мотора соединяются в «звезду» для частотника, работающего от трех фаз 380 вольт.
Обмотки двигателя соединяют «треугольником», когда инвертор запитан от 1-фазной сети.
При выборе метода подключения электродвигателя к частотнику необходимо определить мощности, которые создает двигатель на разных режимах, в том числе и медленный режим, тяжелый запуск. Преобразователь частоты нельзя эксплуатировать с перегрузкой длительное время. Его мощность должна быть с запасом, тогда работа будет без аварий, и срок службы продлится.
Применение
Частотные преобразователи используются в устройствах с необходимостью регулировки скорости двигателя.
- Приводы насосов. Уменьшает потери тепла и воды на 10%. Снижает количество аварий, защищает электродвигатели.
- Вентиляционные системы. Экономия больше, чем при работе с насосами, так как для запуска мощных вентиляторов применяют мощные приводы агрегатов. Экономия появляется за счет снижения потерь на холостом ходу.
- Транспортеры. Инверторы адаптируют скорость двигателя к скорости технологической системы, которая постоянно изменяется. Мягкий пуск повышает ресурс привода системы, так как нет ударных нагрузок, которые вредят оборудованию.
- Компрессоры.
- Дымососы.
- Центрифуги.
- Лифтовое оборудование.
- Оборудование в деревообработке.
- Робототехника.
Преимущества
- Сглаживание работы мотора при запуске и торможении.
- Возможность управления группой двигателей.
- Плавное управление скоростью электродвигателей, без использования редукторов и других механических систем. Это позволяет упростить управление, сделать его дешевле и надежнее.
- Используются совместно с асинхронными двигателями для замены приводов постоянного тока.
- Образование многофункциональных систем управления приводами.
- Изменение настроек непосредственно в работе, без останова.
Похожие темы:
Преобразователи частоты. Различие между ними.
Настоящим прорывом в области регулируемого электропривода стало появление силовых преобразователей частоты или как их именуют в профильной среде — частотников. Это открытие кардинально изменило подход в проектировании систем электроприводов. Если относительно недавно при проектировании сложных механизмов, где без точного регулирование параметров (скорость, момент) не обойтись, выбирались двигатели постоянного тока — ДПТ, то с появлением частотников привода переменного тока начали активно вытеснять двигатели постоянного тока из данных систем. Даже в тяговых электроприводах асинхронный двигатель с коротко-замкнутым ротором вытесняет ДПТ последовательного возбуждения.
Содержание:
Классификация преобразователей частоты
Техническое устройство, преобразующее переменное напряжения одной частоты на входе, в изменяющееся по определенному закону переменное напряжение, но уже другой частотой на выходе называется преобразователем частоты (ПЧ). Бывают двух типов:
- Непосредственные
- Двухзвенные
Непосредственные – это реверсивный тиристорный преобразователь. Главное его достоинство в том, что он подключается напрямую в сеть без дополнительных устройств.
Двухзвенные – представляют собой транзисторный или тиристорный преобразователь. Но главное их отличие от непосредственных преобразователей в том, что для корректной и безопасной работы инвертора необходимо звено постоянного напряжения. Соответственно для подключения их к общепромышленным сетям необходим выпрямитель. Как правило изготавливаются комплектными (инвертор и выпрямитель поставляются вместе и работают от одной системы управления).
Двухзвенные преобразователи частоты
Двухзвенный или как его еще называют со звеном постоянного тока, созданный на базе АИН (автономный инвертор напряжения), содержит в комплекте выпрямитель и фильтр:

ЭМ – электрическая машина, АИН – автономный инвертор напряжения, Lф, Сф – индуктивности и емкости фильтра, fнз – задание частоты выхода инвертора, udз – задание выходного напряжения для выпрямителя, если используются управляемые выпрямители, СУВ, СУИ – системы управления выпрямителем и инвертором соответственно, uнз – задание выходного напряжения инвертора, В – выпрямитель. Пунктиром показаны связи, которые включаются в систему в зависимости от типа устройства.
Для улучшения качества энергии в звене постоянного напряжения и сглаживании пульсаций напряжения и тока используют L-C фильтр. Зачастую он имеют Г – образную схему включения, как показано выше. Также иногда используют фазовый сдвиг в цепи переменного напряжения путем включения обмоток трансформатора в треугольник и звезду:

Данная схема более дорогостоящая и может применяться только при использовании индивидуального трансформатора.
В данной системе выпрямитель может быть управляем или не управляем. Если он управляем, то функция регулирования напряжения ложится на него, если нет, то на АИН. Для рекуперации энергии в сеть выпрямитель должен быть полностью управляем и реверсивен (двухкомплектный). Управление частотным преобразователем производится импульсным методом. Самые распространенные методы это ШИР (широтно-импульсное регулирование) и ШИМ (широтно-импульсная модуляция).
Еще более широкое применение получили автономные инверторы тока (АИТ):

АИТ – автономный инвертор тока, СУИ, СУВ – системы управления преобразователями, УВ – управляемый выпрямитель, Lф – индуктивность фильтра, fнз – задание частоты выходного тока, іdз – задание выходного тока в звене постоянного тока.
В отличии от АИН, где регулируемой выходной величиной является напряжение, в АИТ регулируемой величиной является ток. Немаловажную роль в формировании выходного сигнала заданной частоты является частота коммутации транзисторов или тиристоров. Чем выше частота коммутации, тем лучше качество синусоиды на выходе частотника, но возрастают потери в преобразователе. Ниже приведен результат моделирования работы АИТ (на IGBT транзисторах) на активно-индуктивную нагрузку при различных частотах коммутации:
 Частота коммутации 800 Гц
Частота коммутации 800 Гц  Частота коммутации 2000 Гц
Частота коммутации 2000 Гц 
Частота коммутации 8000 Гц
Как видно из графиков уменьшение частоты коммутации очень плохо влияет на выходное качество тока. Поэтому для каждого устройства необходимо подбирать частоту коммутации частотника соответственно качеству выходного напряжения или тока. Для оптимизации данных процессов на выходе преобразователя частоты иногда ставят L-C фильтр, для сглаживания пульсаций токов и напряжений:

Как видим из схемы — последовательно подключают индуктивность, для сглаживания пульсаций тока, и параллельно емкость, для сглаживания пульсаций напряжения.
Также работа частотника генерирует высшие гармоники в питающей сети:
 Ток двух фаз питающего напряжения
Ток двух фаз питающего напряженияДля уменьшения влияния высших гармоник на сеть используют фильтро-компенсирующие устройства (ФКУ)
Ниже показаны принципиальные схемы преобразователей частоты.
Автономный инвертор напряжения с управляемым выпрямителем

Тиристоры VS1-VS6 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. При увеличении напряжения на емкости Сф выше заданного, транзистор VT7 открывается и вводится в работу тормозной резистор Rб, на котором рассеивается энергия переданная от электрической машины. При глубоком регулировании VD0 повышает коэффициент мощности выпрямителя.
Данный ПЧ не может рекуперировать энергию в сеть, а также насыщает выходное напряжение высшими гармониками и усложняет систему управления из-за необходимости управления УВ. При исполнении УВ двухкомплектным, рекуперирует энергию в сеть, но усложняет систему и делает ее более дорогостоящей. В настоящее время является устаревшим.
Автономный инвертор напряжения с неуправляемым выпрямителем

Диоды VD7-VD12 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. За счет использования ШИМ происходит регулирование амплитуды выходного напряжения и его частоты.
При использовании неуправляемого выпрямителя для торможения двигателя АИН переводится в режим управляемого выпрямителя, работающего таким образом, что напряжение на емкости Сф выше заданного, несмотря на уменьшение скорости вращения двигателя. При увеличении напряжения на емкости Сф открывается транзистор VT7 и энергия выделяемая электродвигателем гасится на тормозном резисторе.
Данный способ торможения получил названия инверторного торможения, хотя инвертирования на самом деле нет. Это связано с тем, что термин динамическое торможение для систем с асинхронным двигателем занят, под ним понимается пропускания постоянного тока через обмотки двигателя.
Главным недостатком такой системы есть отсутствие возможности рекуперировать энергию в сеть, но она получила широкое применение для систем, где не требуется частое торможение.
Рекуперирующий двухзвенный преобразователь частоты на основе обратимого преобразователя напряжения
ОПН – обратимый преобразователь напряжения. В данной схеме имеется два ОПН. ОПН1 работает в выпрямительном режиме и передает энергию через ОПН2, работающий в инверторном режиме, к двигателю. При торможении ОПН2, подключенный к двигателю переходит в выпрямительный режим, а ОПН1, подключенный к сети, в инверторный режим. При этом происходит рекуперация энергии в сеть. Если задать схеме управления на входе cosφ = ± 1, то во всех режимах при регулировании и торможении двигателя из сети будет потребляться или в сеть будет отдаваться практически только активная мощность, а ток будет практически синусоидален, что определяет минимальное вредное влияние на питающую сеть. Эти преобразователи на сегодняшний день являются самыми близким к идеальным.
 Ниже приведена функциональная схема данного устройства:
Ниже приведена функциональная схема данного устройства:

В схеме имеются следующие элементы: ОПН1, подключенный к сети, ОПН2, подключенный к двигателю, датчики тока и напряжения ДТ1 и ДН1 на стороне сети и ДТ2 и ДН2 на стороне постоянного напряжения. Требуемая мощность на стороне постоянного напряжения определяется измерением средних значений Ud и Id, а затем и мощности Pd с помощью вычислителя ВМ, куда поступают сигналы с ДН2 и ДТ2 через фильтр Ф. По действующему значению напряжения сети U1, определенному с помощью вычислителя напряжения ВН, и с учетом заданного угла φ1 определяется ток I1зад, обеспечивающий заданную мощность. Блок ФСН формирует синусоидальное напряжение, повторяющее напряжение сети, а блок «φ1» формирует заданную синусоиду с учетом фазового сдвига φ1. В блоке «ЗАД i1» формируется заданная синусоида тока. В модуляторе М она сравнивается с сигналом датчика тока ДТ1 i1, и формируются управляющие импульсы, которые через усилитель мощности УМ поступают на транзисторы. Блок НТ определяет направление тока (выпрямительный или инверторный режим). Блок выбора режима ВР в соответствии с сигналом от НТ задает угол φ1.
Преимущества двухзвенного рекуперирующего ПЧ: независимость выходной частоты от входной, возможность получения высокого коэффициента мощности на стороне сети. К недостаткам можно отнести: высокая стоимость, сложность системы управления.
Рекуперирующие двухзвенный преобразователь частоты на основе инверторов тока
Автономный инвертор тока, преобразовывает постоянный ток, подаваемый на его вход, в пропорциональный по величине переменный ток. Режим источника тока на входе обеспечивается за счет большой индуктивности L и применения токостабилизирующей обратной связи, поддерживающей заданное значение тока Idз. АИТ выполнен по схеме с отсекающими диодами. Рекуперация энергии при торможении в АИТ возможна при сохранении направления тока за счет сдвига токов и напряжений, т.е. переводом АИТ в режим выпрямления за счет сдвига управляющих импульсов относительно фазных ЭДС электрической машины.
Энергия, передаваемая от электрической машины на сторону постоянного напряжения, должна быть далее передана в сеть переменного напряжения. Для этого управляемый выпрямитель на входе ПЧ должен быть переведен в инверторный режим. При этом сохраняется направление тока и не требуется установка дополнительного комплекта вентилей. Схема применяется в двигателях достаточно большой мощности. Недостатками схемы являются ее не очень хорошие характеристики, поэтому она не является перспективной.

Появление запираемых тиристоров позволило улучшить характеристики ДПЧ на основе АИТ.

Формирование выходного тока осуществляется совместно управляемым выпрямителем и автономным инвертором тока.

Показана временная диаграмма, отражающая моменты включенного и выключенного состояний тиристора V1. На участке соответствующим зоне 2, ключ V1 включен постоянно, и ток сглаживающего дросселя непрерывно поступает в фазу А двигателя. Для формирования тока в зонах 1 и 3 необходимо соответствующим образом переключать тиристоры. Для обеспечения нарастания и спадания тока (зоны 1 и 3) обычно используется два метода – трапецеидальный и метод выборочного исключения гармоник.
При использовании первого метода моменты коммутации ключей АИТ определяются по пересечению линейно нарастающего сигнала и опорного сигнала пилообразной формы следующего с несущей частотой, при втором методе моменты коммутации ключей рассчитываются заранее исходя из условия подавления высших гармоник определенного порядка (5 и 7 и т.д.). В этой схеме улучшается синусоидальность тока, протекающего по фазам двигателя. Но сохраняются все недостатки, возникающие при питании от сети управляемых выпрямителей напряжения. Преобразователи частоты на основе инверторов тока наиболее применимы в электроприводе синхронных машин, где на выходе вместо автономного инвертора тока включается инвертор тока, ведомый электрической машиной.
Таким образом, на входе и на выходе ПЧ включаются однокомплектные рекуперирующие преобразователи (ОРП) на тиристорах. При этом ведомый инвертор полностью аналогичен выпрямителю, подключенному к сети. Коммутация вентилей ведомого инвертора осуществляется за счет ЭДС электрической машины.При низкой скорости вращения электрической машины эта ЭДС недостаточна для коммутации вентилей. Поэтому при пуске коммутация осуществляется путем прерывания тока в цепи постоянного тока включением и запиранием выпрямителя.

Непосредственные преобразователи частоты
При использовании НПЧ напряжение из сети подается через управляемые вентили на двигатель. В каждой фазе НПЧ установлен реверсивный двухкомплектный преобразователь с совместным или раздельным управлением силовыми комплектами.
На рис. 1а приведена схема трехфазно-однофазного НПЧ на основе трехфазных нулевых схем. Он преобразует трехфазное напряжение в однофазное, но с регулируемой частотой.Комплекты В и Н переключаются, и на выходе получается двуполярное напряжение. Для управления преобразователями используют определенные законы управления — прямоугольный и синусоидальный. Если используют прямоугольный принцип управления, то алгоритм работы будет таков: при прохождении одной полуволны напряжения, на один из комплектов подаются управляющие импульсы с углом управления (углом задержки) a = const. Этот комплект будет работать в режиме выпрямителя, а затем с углом управления (углом опережения) b = a. Чтоб снизить ток необходимо перейти в инверторный режим (рис. 1 б). Для избежания короткого замыкания в самом инверторе необходимо чтоб ток снизился до нуля – это называется бестоковой паузой. После осуществления бестоковой паузы в работу включается второй комплект.
Если используют синусоидальное управление, то гладкая составляющая выходного напряжения должна изменятся по синусоидальному закону, для этого угол управления a непрерывно меняется (рис. 1 в).
 Рисунок 1.
Рисунок 1.Схема трехфазно-трехфазного НПЧ, выполненного на основе трехфазных мостовых схем. Ниже приведена схема.

Данный тип преобразователей не получил широкого применения из-за ряда недостатков при его применении. А это: невозможность полного регулирования выходной частоты (при использовании трехфазных мостовых схем диапазон регулирования 25-45 Гц, а при нулевых 15-45 Гц). Постоянная коммутация вентилей, что приводит к ухудшению коэффициента мощности, а также плохое качество выходного напряжения и большое влияние на питающую сеть.
Преимуществом можно признать то, что у таких преобразователей более высокий КПД, из-за однократного преобразования энергии.
Наиболее распространены преобразователи частоты на базе АИТ и АИН на IGBT транзисторах, в силу лучших показателей качества энергии на выходе преобразователя и их влияния на сеть.
Частотные преобразователи предназначены для плавного регулирования скорости асинхронного двигателя за счет создания на выходе преобразователя трехфазного напряжения переменной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление. Принцип работы частотного преобразователя или как его часто называют — инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя. Кроме того, в схему иногда включают цепь «слива» энергии — транзистор с резистором большой мощности рассеивания. Эту схему используют в режиме торможения, чтобы гасить генерируемое напряжение двигателем и обезопасить конденсаторы от перезарядки и выхода из строя. Принцип работы частотного преобразователя или как его часто называют — инвертора: переменное напряжение промышленной сети выпрямляется блоком выпрямительных диодов и фильтруется батареей конденсаторов большой емкости для минимизации пульсаций полученного напряжения. Это напряжение подается на мостовую схему, включающую шесть управляемых IGBT или MOSFET транзисторов с диодами, включенными антипараллельно для защиты транзисторов от пробоя напряжением обратной полярности, возникающем при работе с обмотками двигателя. Кроме того, в схему иногда включают цепь «слива» энергии — транзистор с резистором большой мощности рассеивания. Эту схему используют в режиме торможения, чтобы гасить генерируемое напряжение двигателем и обезопасить конденсаторы от перезарядки и выхода из строя.Блок-схема инвертора показана ниже. Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде. Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации. Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток). Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости. Регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты. Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением  неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Mс. При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:  Для вентиляторного характера момента нагрузки это состояние имеет вид:  При моменте нагрузки, обратно пропорциональном скорости:  Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке асинхронного двигателя. Преимущества использования регулируемого электропривода в технологических процессах Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения. Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора. При использовании частотных регуляторов обеспечивается плавная регулировка скорости вращения позволяет в большинстве случаев отказаться от использования редукторов, вариаторов, дросселей и другой регулирующей аппаратуры. При подключении через частотный преобразователь пуск двигателя происходит плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механизмы, тем самым увеличивает срок их службы. Перспективность частотного регулирования наглядно видна из рисунка  Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества. Структура частотного преобразователя Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Принцип работы преобразователя частоты Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв. Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя. Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи. 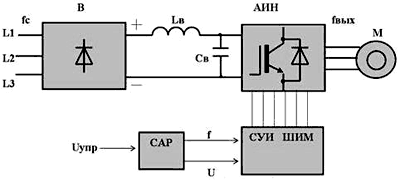 Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодулирована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна. Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const. Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток. 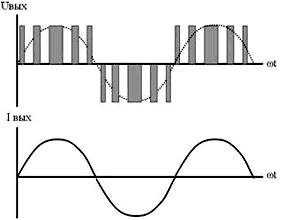 Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах. Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6. За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока. 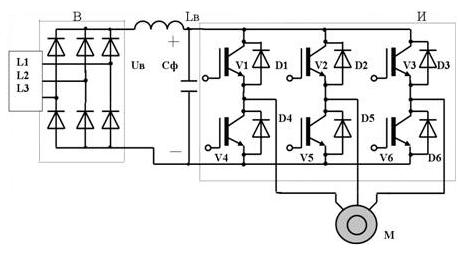 И – трехфазный мостовой инвертор; В – трехфазный мостовой выпрямитель; Сф – конденсатор фильтра; Вариант схемы подключения частотного преобразователя фирмы Omron.
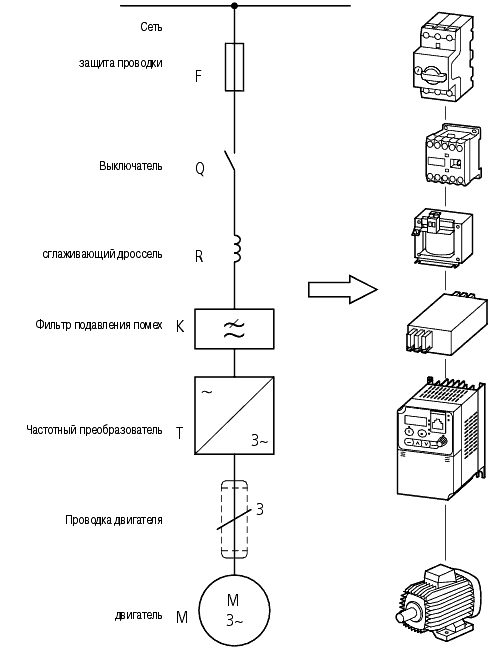
Подключение частотных преобразователей с соблюдением требований ЭМС Техническая информация преобразователи частоты |
Основы преобразователя частоты
Для достижения высокой эффективности, большой управляемости и экономии энергии в приложениях, связанных с промышленным асинхронным двигателем, необходимо внедрить управляемые системы преобразователей частоты. В настоящее время система преобразователя частоты представляет собой двигатель переменного тока, питаемый от статического преобразователя частоты. Современный преобразователь частоты отлично подходит для применения в двигателях переменного тока и простой установки. Однако одна важная проблема связана с несинусоидальным выходным напряжением. Этот фактор вызвал много нежелательных проблем.Увеличенные потери асинхронного двигателя, шум и вибрации, вредное воздействие на систему изоляции индукции и отказ подшипника — примеры проблем систем, связанных с преобразователем частоты. Повышенные индукционные потери означают снижение номинальной выходной мощности индукции для предотвращения перегрева. Измерения в лаборатории показывают, что повышение температуры может быть на 40% выше с преобразователем частоты по сравнению с обычными источниками питания. Непрерывные исследования и усовершенствования преобразователей частоты решили многие из этих проблем.К сожалению, кажется, что решение одной проблемы акцентировало другую. Снижение потерь на индуктивности и преобразователе частоты приводит к увеличению вредного воздействия на изоляцию. Производители индукционных систем, конечно же, знают об этом. Новые индукционные конструкции (двигатели, устойчивые к инвертору) начинают появляться на рынке. Улучшенная изоляция обмотки статора и другие конструктивные усовершенствования гарантируют, что асинхронные двигатели будут лучше адаптированы для применения в преобразователях частоты. Введение
Одной из наиболее серьезных проблем асинхронного двигателя была сложность его адаптации к регулировке скорости.Синхронная скорость двигателя переменного тока определяется следующим уравнением.
n s = 120 * f / pn с = синхронная скорость
f = частота электросети
p = номер полюса
Единственный способ отрегулировать скорость для данного номера полюса — это изменить частоту.
Основной принцип
Теоретически, основная идея проста, процесс преобразования стабильной частоты линии электропередачи в переменную частоту в основном выполняется в два этапа:
- Источник переменного тока выпрямляется в постоянное напряжение.
- Напряжение постоянного тока преобразуется в напряжение переменного тока желаемой частоты.
Различные типы преобразователей частоты
PWM Инвертор источника напряжения (VSI)
ШИМ (широтно-импульсная модуляция) широко применяется в промышленности преобразователей частоты. Они доступны от нескольких сотен ватт до мегаватт.
ШИМ-преобразователь не обязательно должен точно соответствовать нагрузке, ему нужно только убедиться, что нагрузка не потребляет ток выше, чем рассчитан ШИМ-преобразователь. Вполне возможно запустить индукцию 20 кВт с ШИМ-преобразователем мощностью 100 кВт. Это большое преимущество, облегчающее работу приложения.
В настоящее время преобразователь частоты ШИМ использует биполярный преобразователь с изолированным затвором (IGBT). Современные ШИМ-преобразователи частоты работают очень хорошо и не сильно отстают от конструкций с синусоидальным источником питания — по крайней мере, в диапазоне мощности до 100 кВт или около того.
Инвертор источника тока (CSI)
Инвертор источника тока представляет собой грубую и довольно простую конструкцию по сравнению с ШИМ. Он использует простые тиристоры или SCR в цепях питания, что делает его намного дешевле. Он также имеет преимущество, будучи очень надежным. Конструкция делает его устойчивым к короткому замыканию из-за больших индуктивности в цепи постоянного тока. Это громче, чем ШИМ.
Ранее инвертор источника тока был лучшим выбором для больших нагрузок. Недостатком инвертора источника тока является необходимость согласования с нагрузкой.Преобразователь частоты должен быть рассчитан на используемый асинхронный двигатель. Фактически, сама индукция является частью инвертированной цепи.
Инвертор источника тока снабжает асинхронный двигатель током квадратной формы. На низких скоростях индукция создает зубчатый момент. Преобразователь частоты этого типа будет генерировать больше шума на источнике питания по сравнению с ШИМ-преобразователем. Фильтрация необходима.
Сильные переходные процессы в выходном напряжении являются дополнительным недостатком инвертора источника тока.Переходные процессы могут достигать почти в два раза больше номинального напряжения в худших случаях. Существует также риск преждевременного износа изоляции обмотки, если используется этот преобразователь частоты. Этот эффект наиболее серьезен, когда нагрузка не соответствует преобразователю частоты должным образом. Это может произойти при работе с частичной нагрузкой. Этот вид частотного преобразователя все больше теряет свою популярность.
Векторное управление потоком (FVC)
Векторное управление потоком представляет собой более сложный тип преобразователя частоты, который используется в приложениях, требующих экстремальных требований к управлению.Например, на бумажных фабриках необходимо очень точно контролировать скорость и силы растяжения.
Преобразователь частоты FVC всегда имеет своего рода контур обратной связи. Этот вид частотного преобразователя, как правило, представляет незначительный интерес для применения в насосах. Это дорого, и его преимуществами нельзя воспользоваться.
Влияние на мотор
Индукция работает лучше всего, когда снабжена источником чистого синусоидального напряжения. Это в основном имеет место при подключении к надежному коммунальному источнику питания.
Когда индуктор подключен к преобразователю частоты, на него подается несинусоидальное напряжение — больше похожее на прерывистое квадратное напряжение. Если мы подадим 3-фазную индукцию с симметричным 3-фазным квадратным напряжением, все гармоники, кратные трем, а также четные числа, будут удалены из-за симметрии. Но по-прежнему остаются цифры 5; 7 и 11; 13 и 17; 19 и 23; 25 и так далее. Для каждой пары гармоник нижнее число вращается в обратном направлении, а большее число вращается в прямом направлении.
Скорость асинхронного двигателя определяется основным числом, или числом 1, из-за его сильного доминирования. Теперь, что происходит с гармониками?
С точки зрения гармоник, кажется, что индукция заблокировала ротор, что означает, что скольжение составляет приблизительно 1 для гармоник. Они не дают никакой полезной работы. Результатом являются главным образом потери ротора и дополнительный нагрев. В частности, в нашем приложении это серьезный результат. Однако с помощью современных технологий можно устранить большую часть содержания гармоник в индукционном токе, тем самым уменьшая дополнительные потери.
Преобразователь частоты до
Самые ранние преобразователи частоты часто использовали простое квадратное напряжение для питания асинхронного двигателя. Они вызвали проблемы с нагревом, и индукции работали с типичным шумом, вызванным пульсацией крутящего момента. Гораздо лучшая производительность была достигнута простым устранением пятого и седьмого. Это было сделано путем некоторого дополнительного переключения сигнала напряжения.
Преобразователь частоты сегодня
В настоящее время техника более сложна, и большинство недостатков — история.Разработка быстрых силовых полупроводниковых приборов и микропроцессора позволила адаптировать схему переключения таким образом, чтобы устранить большинство вредных гармоник.
Частоты переключения до 20 кГц доступны для преобразователей частоты в диапазоне средней мощности (до нескольких десятков кВт). Индукционный ток с преобразователем частоты этого типа будет иметь форму синуса.
При высокой частоте переключения индукционные потери сохраняются низкими, но потери в преобразователе частоты будут увеличиваться.Общие потери станут выше при чрезмерно высоких частотах переключения.
Некоторые основные теории двигателя
Производство крутящего момента в асинхронном двигателе может быть выражено как
T = V * τ * B [Нм]V = активный объем ротора [м 3 ]
τ = ток на метр окружности отверстия статора
B = плотность потока в воздушном зазоре
B = пропорционально (E / ω) = E / (2 * π * f)ω = угловая частота напряжения статора
E = индуцированное напряжение статора
Чтобы получить наилучшие характеристики на различных скоростях, становится необходимым поддерживать соответствующий уровень намагниченности для индукции для каждой скорости.
Диапазон различных характеристик крутящего момента показан на следующем рисунке. Для нагрузки с постоянным моментом отношение V / F должно быть постоянным. Для квадратной крутящей нагрузки постоянное отношение V / F приведет к чрезмерно высокой намагниченности при более низкой скорости. Это приведет к излишне высоким потерям в железе и потерям сопротивления (I 2 R).
Лучше использовать квадратное соотношение V / F. Таким образом, потери в стали и I 2 R снижаются до уровня, более приемлемого для фактического момента нагрузки.
Если мы посмотрим на рисунок, мы обнаружим, что напряжение достигло своего максимума и не может быть увеличено выше базовой частоты 50 Гц. Диапазон выше базовой частоты называется диапазоном ослабления поля. Следствием этого является то, что больше невозможно поддерживать необходимый крутящий момент без увеличения тока. Это приведет к проблемам с разогревом того же типа, что и при нормальном пониженном напряжении, подаваемом из синусоидальной электрической сети. Номинальный ток преобразователя частоты, вероятно, будет превышен.
Бег в диапазоне ослабления поля
Иногда возникает искушение запустить насос на частотах выше частоты промышленной электросети, чтобы достичь рабочей точки, которая в противном случае была бы невозможна. Это требует дополнительной осведомленности. Мощность на валу насоса будет увеличиваться с кубом скорости. Превышение скорости на 10% потребует на 33% больше выходной мощности. Грубо говоря, можно ожидать, что повышение температуры увеличится примерно на 75%.
Тем не менее, существует предел того, что мы можем выжать из индукции при превышении скорости.Максимальный крутящий момент индукции будет падать как функция 1 / F в диапазоне ослабления поля.
Очевидно, что индукция выпадет, если преобразователь частоты не сможет поддерживать его напряжением, которое соответствует напряжению, необходимому для крутящего момента.
Уменьшение
Во многих случаях индукция работает на максимальной мощности от синусоидальной электрической сети, и любой дополнительный нагрев не может быть допущен. Если такая индукция питается от преобразователя частоты какого-либо типа, она, скорее всего, должна работать на более низкой выходной мощности, чтобы избежать перегрева.
Нет ничего необычного в том, что преобразователь частоты для больших насосов мощностью более 300 кВт добавляет дополнительные индукционные потери на 25–30%. В верхнем диапазоне мощности только немногие преобразователи частоты имеют высокую частоту переключения: от 500 до 1000 Гц обычно для преобразователей частоты предыдущего поколения.
Чтобы компенсировать дополнительные потери, необходимо уменьшить выходную мощность. Мы рекомендуем общее снижение номинальной мощности на 10–15% для больших насосов.
Поскольку преобразователь частоты загрязняет сеть питания гармониками, энергетическая компания иногда предписывает входной фильтр.Этот фильтр уменьшит доступное напряжение обычно на 5–10%. Следовательно, индукция будет работать при 90–95% номинального напряжения. Следствием этого является дополнительный обогрев. Может быть необходимо снижение номинальной стоимости.
Пример
Предположим, что выходная мощность для фактического двигателя насоса составляет 300 кВт при 50 Гц, а повышение температуры составляет 80 ° C с использованием синусоидальной электрической сети. Дополнительные потери 30% приведут к индукции, которая будет на 30% теплее. Консервативное предположение состоит в том, что повышение температуры зависит от квадрата мощности на валу.
Чтобы не превышать 80 ° C, мы должны уменьшить мощность на валу до
P уменьшено = √ (1 / 1,3) * 300 = 263 кВтУменьшение может быть достигнуто либо уменьшением диаметра рабочего колеса, либо уменьшением скорости.
Преобразователь частоты Потери
Когда общая эффективность системы преобразователя частоты определена, внутренние потери преобразователя частоты должны быть включены. Эти потери преобразователя частоты не являются постоянными и их нелегко определить.Они состоят из постоянной части и части, зависящей от нагрузки.
Постоянные потери:
Потери охлаждения (вентилятор охлаждения) — потери в электронных цепях и т. Д.
Потери в зависимости от нагрузки:
Потери на переключение и потери в силовых полупроводниках.
На следующем рисунке показана эффективность преобразователя частоты как функция частоты при кубической нагрузке для агрегатов мощностью 45, 90 и 260 кВт. Кривые являются репрезентативными для преобразователей частоты в диапазоне мощности 50–300 кВт; с частотой переключения около 3 кГц и IGBT второго поколения.
Влияние на изоляцию двигателя
Выходные напряжения современных преобразователей частоты имеют очень короткое время нарастания напряжения.
dU / dT = 5000 В / мкс является общим значением.Такие крутые наклоны напряжения будут вызывать чрезмерное напряжение в изоляционных материалах индукционной обмотки. При коротких временах нарастания напряжение в обмотке статора распределяется неравномерно. При синусоидальном источнике питания напряжение поворота в индукционной обмотке обычно распределяется равномерно.С преобразователем частоты, с другой стороны, до 80% напряжения будет падать в течение первого и второго витка. Поскольку изоляция между проводами представляет собой слабое место, это может оказаться опасным для индукции. Короткое время нарастания также вызывает отражение напряжения в индукционном кабеле. В худшем случае это явление удвоит напряжение на индукционных клеммах. Индукция, питаемая от преобразователя частоты 690 В, может подвергаться воздействию до 1900 В между фазами.
Амплитуда напряжения зависит от длины индукционного кабеля и времени нарастания. При очень коротком времени нарастания полное отражение происходит в кабеле длиной от 10 до 20 метров.
Чтобы обеспечить работу и достаточный срок службы двигателя, абсолютно необходимо адаптировать обмотку для использования с преобразователем частоты. Индукции для напряжений выше 500 вольт должны иметь некоторую форму усиленной изоляции. Обмотка статора должна быть пропитана смолой, обеспечивающей изоляцию без пузырьков или полостей.Свечение часто начинается вокруг полостей. Это явление в конечном итоге разрушит изоляцию.
Существуют способы защиты двигателя. Поверх усиленной системы изоляции может потребоваться установка фильтра между преобразователем частоты и индукцией. Такие фильтры доступны от большинства известных поставщиков преобразователей частоты.
Фильтр обычно замедляет время нарастания напряжения с
dU / dT = 5000 В / мкс до 500-600 В / мксНеисправность подшипника
Поломка вращающихся механизмов часто может быть связана с отказом подшипника.В дополнение к чрезмерному нагреву, недостаточной смазке или усталости металла электрический ток, проходящий через подшипники, может быть причиной многих загадочных поломок подшипников, особенно при большой индукции. Это явление обычно вызывается несимметричностью в магнитной цепи, которая вызывает небольшое напряжение в структуре статора, или током нулевой последовательности. Если потенциал между структурой статора и узлом вала станет достаточно высоким, разряд будет происходить через подшипник.Небольшие электрические разряды между элементами качения и дорожкой качения подшипника в конечном итоге повредят подшипник.
Использование частотных преобразователей увеличит вероятность возникновения этого типа отказа подшипника. Техника переключения современного преобразователя частоты вызывает ток нулевой последовательности, который при определенных обстоятельствах проходит через подшипники.
Самый простой способ вылечить эту проблему — это создать препятствие для тока. Обычный метод заключается в использовании подшипника с изоляционным покрытием на наружном кольце.
Выводы
Использование частотного преобразователя не означает без проблем. Множество вопросов, на которые нужно обратить внимание при проектных работах. Будет ли необходимо, например, ограничивать доступную мощность на валу для предотвращения чрезмерного нагрева? Может оказаться необходимым работать на более низкой выходной мощности, чтобы избежать этой проблемы.
Изменится ли изоляция асинхронного двигателя от воздействия инвертора? Нужна ли фильтрация? Современные эффективные инверторы оказывают вредное влияние на изоляцию из-за высокой частоты коммутации и короткого времени нарастания напряжения.
Какую максимальную длину кабеля можно использовать без полного отражения напряжения? Амплитуда напряжения зависит как от длины кабеля, так и от времени нарастания. При очень коротком времени нарастания полное отражение будет происходить в кабелях длиной от 10 до 20 метров.
Может ли быть необходимо использовать изолированные подшипники для предотвращения попадания тока нулевой последовательности в подшипники?
Только когда мы избавимся от всех этих вопросов, мы сможем принимать правильные решения об использовании преобразователя частоты.
слов о преобразователях частоты
 слов о преобразователях частоты (фото: bpa.ru)
слов о преобразователях частоты (фото: bpa.ru)Введение
С конца 1960-х годов преобразователи частоты претерпели чрезвычайно быстрые изменения, в основном в результате развития микропроцессорных и полупроводниковых технологий и их снижения цен. Однако основные принципы преобразователей частоты остаются прежними.
Преобразователи частоты могут быть разделены на четыре основных компонента :
 Рисунок 1 — Упрощенный преобразователь частоты
Рисунок 1 — Упрощенный преобразователь частоты1.Выпрямитель
Выпрямитель, который подключен к одно / трехфазному источнику переменного тока и генерирует пульсирующее постоянное напряжение . Существует два основных типа выпрямителей — , управляемые и , неуправляемые .
2. Промежуточная цепь
Промежуточный контур. Есть три типа:
- Один, который преобразует напряжение выпрямителя в постоянный ток.
- Один, который стабилизирует или сглаживает пульсирующее постоянное напряжение и предоставляет его в распоряжение инвертора.
- Один, который преобразует постоянное напряжение постоянного тока выпрямителя в переменное напряжение переменного тока.
3. Инвертор
Инвертор, который генерирует частоту напряжения двигателя. Альтернативно, некоторые инверторы могут также преобразовывать постоянное напряжение постоянного тока в переменное напряжение переменного тока.
Схема управления
Электроника схемы управления, которая передает сигналы и , принимает сигналы от выпрямителя, промежуточной цепи и инвертора.Детали, которые подробно контролируются, зависят от конструкции отдельного преобразователя частоты (, см. Рисунок 2 ).
Общим для всех преобразователей частоты является то, что схема управления использует сигналы для включения или выключения полупроводниковых преобразователей. Преобразователи частоты делятся в соответствии с схемой переключения, которая контролирует напряжение питания двигателя.
На рисунке 2 показаны различные принципы проектирования / управления:
- Управляемый выпрямитель,
- — это неуправляемый выпрямитель,
- — промежуточная цепь переменного тока,
- — постоянное напряжение постоянного тока промежуточной цепи,
- — промежуточная цепь переменного тока,
- — инвертор PAM и Инвертор
- ШИМ.
 Рисунок 2 — Различные принципы конструкции / управления преобразователем частоты
Рисунок 2 — Различные принципы конструкции / управления преобразователем частоты Инвертор источника тока: CSI
(1 + 3 + 6)
Импульсно-амплитудно-модулированный преобразователь: PAM
(1 + 4 + 7) (2 + 5 + 7)
Преобразователь с широтно-импульсной модуляцией: PWM / VVC плюс
(2 + 4 + 7)
Прямые преобразователи , которые не имеют промежуточной цепи, также должны быть кратко упомянуты для полноты.Эти преобразователи используются в мегаваттном диапазоне мощности для генерации низкочастотного питания непосредственно от сети с частотой 50 Гц , и их максимальная выходная частота составляет около с частотой 30 Гц .
Ресурс // Факт, который стоит знать о преобразователях частоты — Danfoss
,Фермерам со значительными затратами на перекачку рекомендуется изучить стоимость и преимущества установки преобразователей частоты.
Водяные насосы повсюду в сельском хозяйстве, необходимые как для орошения, так и для отопления, вентиляции и охлаждения (HVAC). В интенсивных секторах преобразователи частоты могут вдвое снизить энергопотребление в некоторых приложениях, а экономия быстро покрывает затраты на технологию.Экономия энергии может значительно варьироваться в зависимости от характеристик системы и типа работы. Типичная экономия составляет от 30 до 50 процентов.
Оценка пригодности
Водяные насосы, которые испытывают очень изменчивые условия спроса, часто являются хорошими кандидатами для преобразователей частоты. В таких случаях электронное управление изменяет частоту и напряжение, подаваемое на двигатель, который регулирует скорость двигателя и, в свою очередь, регулирует производительность насоса.
Однако не все водяные насосы и их применения выиграют от использования преобразователей частоты.Преобразователи частоты не рекомендуются для систем с высоким статическим напором или насосов, которые работают в течение продолжительных периодов в условиях низкого расхода.
Еще одним соображением является рабочая среда водяного насоса и относительная чувствительность преобразователей частоты и их цифровых систем управления к условиям окружающей среды. Например, может быть неразумно устанавливать дорогие преобразователи частоты в местах с высокой вероятностью удара молнии.
Затраты и дооснащение
В принципе, преобразователи частоты могут быть установлены на любой водяной насос; Однако это не всегда практично или экономически эффективно.
Преобразователь частоты должен быть подключен к управляющему сигналу, а также может потребоваться установка измерительных устройств или контроллеров, которые обычно должны быть включены в стоимость измерения. Финансовая целесообразность установки преобразователя частоты зависит от применения двигателя и времени работы. Преобразователи частоты, как правило, наиболее экономичны при установке на большие насосы.
Бюджетные цены преобразователя частоты обычно составляют от 100 до 300 долл. США / кВт для низковольтных блоков мощностью менее 100 кВт и могут быть на 30–80 процентов выше для высоковольтных.
Преобразователи частоты могут быть установлены на существующие двигатели, но необходимо проверить ограничения, связанные с рекомендуемой минимальной скоростью (например, перегрев). Гармоники также могут снизить эффективность двигателя, поэтому рекомендуется проверить, нужны ли фильтры гармоник для защиты двигателя.
Механические преимущества
В отличие от обычных методов управления потоком, таких как дроссельные клапаны или байпасные системы, основным преимуществом технологии преобразователя частоты является то, что она лучше соответствует энергии жидкости, необходимой системе, с энергией, которую водяной насос доставляет в систему.
Мощность водяного насоса пропорциональна кубу скорости двигателя; следовательно, значительное снижение мощности (и экономия энергии) может быть достигнуто за счет снижения скорости двигателя. Преобразователь частоты может устранить необходимость дросселировать поток (и потерять энергию) или позволить медленнее перекачивать воду или охлаждающую жидкость, уменьшая потери энергии на трение. Возможности плавного пуска и останова также снижают механические и электрические нагрузки, а также риск гидравлического удара.
Техническое объяснение
Правый рисунок показывает, что при уменьшении скорости двигателя кривая насоса смещается влево, а расход и напор уменьшаются, что приводит к снижению энергопотребления. Если преобразователь частоты не использовался в этом приложении управления потоком, поток необходимо было бы уменьшить путем дросселирования, обхода или включения и выключения водяного насоса.
Эта связь между производительностью насоса (расходом, напором и мощностью) и скоростью объясняется законами соответствия.Например, снижение скорости насоса на 10 процентов приводит к снижению мощности на 27 процентов:
N 2 = N 1 x 0,9Эти законы применяются только к системам с отсутствующим или очень низким статическим напором.При значительном вкладе статического напора рабочие точки перемещаются влево. На более низких скоростях насос не создает достаточного напора для преодоления статического напора, и происходит «гидравлическое отключение».
P 2 = P 1 x (N 2 / N 1 ) 3 = P 1 x (0,9N 1 / N 1 ) 3 = P 1 х (0,9) 3 = P 1 х 0,73
Законы Сродства изображаются следующими отношениями:
Q ∝ N; Н N 2 ; П № 3Где
Q = расход
H = голова
P = потребляемая мощность
N = скорость вращения
N 1 и N 2 являются исходной и новой скоростями вращения вентилятора соответственно, а P 1 и P 2 являются исходной и новой потребляемой мощностью.
Отработанный пример
Оцените экономию энергии, если преобразователь частоты будет установлен на водяной насос для управления потоком в соответствии с требованиями процесса. Уменьшение расхода приведет к снижению эффективности насоса. Предполагается, что КПД водяных насосов при расходе 75 процентов будет составлять 77 процентов, а КПД при расходе 50 процентов — 70 процентов. КПД двигателя существенно не снижается, пока нагрузка двигателя не опустится ниже 50 процентов; таким образом, предполагается, что двигатель остается эффективным на 92%.Годовое потребление электроэнергии рассчитывается ниже.
Табл. Годовой расчет потребления электроэнергии
| Время | % Потока | Расход (л / мин) | Голова (м) | КПД насоса | Мощность (кВт) | Электричество (кВтч / год) |
| 25% | 100% | 350 | 30 | 84% | 2.2 | 4865 |
| 25% | 80% | 250 | 23 | 77% | 1,3 | 2906 |
| 50% | 70% | 180 | 20 | 70% | 0.9 | 4003 |
| Всего | 11775 | |||||
Таким образом, экономия электроэнергии:
Годовая экономия электроэнергии = 19460 кВтч — 11775 = 7685 кВтч год. (39% экономии)
Ключевые факторы при оценке котировок
Преобразователи частоты приводят к потерям в виде тепла; как правило, их эффективность составляет от 95 до 99 процентов.При сравнении различных устройств проверьте их номинальную эффективность преобразователя частоты.
Преобразователи частоты также вызывают гармоники, которые могут снизить эффективность двигателя. Хотя потери, как правило, низкие (примерно один процент), рекомендуется оценить соответствующие гармоники, чтобы проверить, понадобятся ли фильтры гармоник для защиты вашего двигателя.
Бюджетные цены преобразователя частоты обычно составляют от 100 до 200 долл. США / кВт для низковольтных блоков и могут быть на 30-80 процентов выше для высоковольтных.Стоимость установки будет варьироваться в зависимости от расстояния между двигателем и коммутационной комнатой (длина кабеля) и от того, требуется ли корпус для соответствия требованиям по защите преобразователя частоты и охлаждению.
 Рисунок 1 — Принципиальная схема преобразователя частоты
Рисунок 1 — Принципиальная схема преобразователя частотыВ принципе преобразователь частоты состоит из выпрямителя, д.с. преобразователь связи , преобразователь и управляющая электроника (, рис. 1 выше ).
На входе инвертора однофазный или взаимосвязанный трехфазный ток. напряжение меняется на пульсирующий d.с. напряжение и выталкивается в постоянный ток преобразователь связи, который также служит накопителем энергии (буфер , ). Конденсаторы в д.с. преобразователь связи и сети LC, соединенные с землей в a.c. Сетевой фильтр , может вызвать проблемы с устройствами защитного отключения (УЗО), подключенными последовательно.
Причиной этого является , часто ошибочно , замеченный в применении разрядников.
Проблемы, однако, возникают из-за кратковременной индукции токов повреждения преобразователем частоты.Их достаточно для активации чувствительных автоматических выключателей с утечкой на землю (УЗО).
Предохранитель RCD с защитой от перенапряжения, доступный для тока отключения I Δn = 30 мА и мин. возможность разряда 3 кА (8/20 мкс) обеспечивает решение проблемы.
 Рисунок 2 — ЭМС-соединение экрана экранирования линии питания двигателя
Рисунок 2 — ЭМС-соединение экрана экранирования линии питания двигателяС помощью управляющей электроники инвертор выдает тактовое выходное напряжение. Чем выше тактовая частота управляющей электроники для широтно-импульсной модуляции, тем более синусоидальным является выходное напряжение.С каждым циклом создается пиковое напряжение , которое накладывается на кривую основной частоты. Это пиковое напряжение достигает значений 1200 В и выше ( согласно преобразователю частоты ).
Чем лучше симуляция синусоиды на выходе, тем лучше рабочие характеристики и отклик управления двигателя. Это означает, однако, что пики напряжения появляются на выходе преобразователя частоты чаще.
При выборе разрядников для защиты от перенапряжений необходимо учитывать максимальное непрерывное рабочее напряжение U c .Указывает максимально допустимое рабочее напряжение, к которому может быть подключено устройство защиты от перенапряжений. Это означает, что устройства защиты от перенапряжений с соответственно более высоким U c используются на выходной стороне преобразователя частоты.
Это позволяет избежать более быстрого старения из-за постепенного нагрева устройства защиты от перенапряжений при нормальных условиях эксплуатации и соответствующих пиковых напряжений. Этот нагрев разрядника приводит к сокращению срока службы и, как следствие, к отключению устройства защиты от перенапряжений от защищаемой системы.
Напряжение на выходе преобразователя частоты является переменным и регулируется немного выше, чем номинальное напряжение на входе. Часто это ок. + 5% во время непрерывной работы, чтобы, например, компенсировать падение напряжения на подключенной линии.
 Рисунок 3 — Структура преобразователя частоты с УЗИП
Рисунок 3 — Структура преобразователя частоты с УЗИППример с устройствами Dehn
1 — DEHNguard S DG S 275
2 — DEHNguard S DG S 600
3 — BLITZDUCTOR XT
В противном случае можно просто сказать, что максимальное напряжение на входе преобразователя частоты равно максимальному напряжению на выходе преобразователя частоты.
Высокая тактовая частота на выходе преобразователя частоты генерирует полевые помехи и, следовательно, требует обязательно экранированной кабельной разводки, чтобы не мешать соседним системам.
Для экранирования линии питания двигателя необходимо обеспечить двустороннее заземление экрана на преобразователе частоты и приводном двигателе. Соприкосновение экрана с большой поверхностью является результатом требований ЭМС.
Здесь выгодно использовать пружины с постоянным усилием ( Рисунок 2 ).
С помощью промежуточных систем заземления, то есть системы заземления, к которой подключены преобразователи частоты и приводной двигатель, разности потенциалов между частями установки уменьшаются, и, таким образом, избегают выравнивания токов через экран.
Рисунок 3 показывает пример использования устройств защиты от перенапряжения Тип DEHNguard на стороне источника питания и тип BLITZDUCTOR для сигналов 0 — 20 мА. Защитные устройства должны быть индивидуально адаптированы в соответствии с интерфейсом.
Для интеграции преобразователя частоты в автоматизацию здания абсолютно необходимо, чтобы все интерфейсы оценки и связи были связаны с устройствами защиты от перенапряжений во избежание сбоев системы.
Ресурс: Руководство по молниезащите — dehn.de
,