Расчет трехфазного синхронного двигателя. Номинальное фазное напряжение
Расчет трехфазного синхронного двигателя
Проектное задание:
1. Номинальная мощность 
2. Номинальное напряжение (линейное) 
3. Номинальная частота вращения 
4. Частота 
5. 
6. Кратность максимального момента 
Режим работы — продолжительный.
Номинальные величины
1. Номинальное фазное напряжение (предполагается, что обмотка статора соединена в звезду)

2. Номинальная полная мощность

 исходя из
номинальных данных машины
исходя из
номинальных данных машины
3. Номинальный фазный ток

4. Число пар полюсов
5. Расчетная мощность

 -коэффициент
представляющий собой отношение ЭДС в якоре при номинальной нагрузке к
номинальному напряжению. При работе синхронного двигателя с опережающим током и
-коэффициент
представляющий собой отношение ЭДС в якоре при номинальной нагрузке к
номинальному напряжению. При работе синхронного двигателя с опережающим током и

Размер статора
6. Графическим методом предварительно определяем внутренний диаметр
статора для  при
при 

7. Внешний диаметр статора

 -имеет значение в
зависимости от числа полюсов
-имеет значение в
зависимости от числа полюсов
По табличным данным выбираем ближайший нормализованный внешний диаметр статора(Габарит №11):

 -высота оси вращения
-высота оси вращения
8. Полюсное деление
9. Расчетная длина статора. По графикам для  при р=3 находим
при р=3 находим  . Задаемся:
. Задаемся: 

 -зависят от размеров
и конфигурации полюсного наконечника, а так же воздушного зазора и полюсного
деления. Они берутся предварительно.
-зависят от размеров
и конфигурации полюсного наконечника, а так же воздушного зазора и полюсного
деления. Они берутся предварительно.
 — обмоточный
коэффициент. Определяется предварительно
— обмоточный
коэффициент. Определяется предварительно  , что соответствует
шагу обмотки
, что соответствует
шагу обмотки 
10. Находим 

— удовлетворяет
заданному промежутку значений при р=3
11. Действительная длина статора

12. Число вентиляционных каналов при 

Из этого предела
выбираем целое значение 
13. Длина пакета

14. Суммарная длина пакетов магнитопровода

Зубцовая зона статора.
15. Число параллельных ветвей обмотки статора.
Так как  ,
то выбираем
,
то выбираем 
16. По графику для находим

17. Максимальное число пазов (зубцов) магнитопровода статора

18. Минимальное число пазов (зубцов) магнитопровода статора
19. Число пазов магнитопровода статора
Так как  то сердечник
выполняется не сегментированным
то сердечник
выполняется не сегментированным
Выберем значение Z1 из заданного промежутка Z1min…Z1max, чтобы удовлетворяла условиям:
а) Z1 должно быть кратным числу фаз m и числу параллельных ветвей а б)  должно быть целым
или дробным вида
должно быть целым
или дробным вида 
— при дробном
числе пазов на полюс и фазу  -
целое число
-
целое число
-при целом числе
пазов на полюс и фазу  — целое
число
— целое
число
Выберем Z1=54
При этом 
20. Расчет числа проводников в пазу 

Уточненная линейная нагрузка

Пазы и обмотка статора
21. Ширина паза (предварительно)

22. Поперечное сечение эффективного проводника обмотки статора (предварительно)

где

23. Возможная ширина изолированного проводника

Изоляция катушек
выбрани для класса нагревостойкости «В». Двусторонняя толщина изоляции 
Предварительная ширина элементарного проводника с изоляцией
24. Размеры проводников обмотки статора. Принимаем,
что эффективный проводник состоит из двух элементарных.( ) Марка провода ПСД
с толщиной двухсторонней изоляции 0,33. Толщина изоляции элементарного
проводника 0,05. Ширина голого прямоугольного проводника
) Марка провода ПСД
с толщиной двухсторонней изоляции 0,33. Толщина изоляции элементарного
проводника 0,05. Ширина голого прямоугольного проводника  . Ширина голого
элементарного проводника
. Ширина голого
элементарного проводника 
Выберем
стандартные значения  и
и  равные
равные  .
.

25. Ширина паза

 — допуски на
разбухание изоляции
— допуски на
разбухание изоляции
 — технологические
допуски на укладку
— технологические
допуски на укладку
26. Высота паза

 — суммарная толщина
изоляции по высоте паза
— суммарная толщина
изоляции по высоте паза
 — высота клина
— высота клина
 -
допуски на разбухание изоляции
-
допуски на разбухание изоляции

Эскиз паза изображен на рис.1 в масштабе 4:1

рис.1
Спецификация паза:
|
Наименование |
Число слоев |
Толщина,мм |
|||
|
по шир. |
по выс. |
по шир. |
по выс. |
||
|
1 |
Провод ПСД 2,65*4(3,03*8,43) |
1 |
9 |
8,43 |
30,3 |
|
2 |
Лента стеклослюдинитовая ЛС 0.13мм |
3 |
впол нахлеста |
2,00 |
2 |
|
3 |
Лента стеклянная ЛЭС (покровная) 0.1мм |
1 |
встык |
0.2 |
0.2 |
|
Двусторонняя толщина изоляции одной катушки |
— |
— |
2,20 |
2,2 |
|
|
4 |
Стеклотекстолит СТ1 толщиной 1мм |
— |
2 |
— |
2 |
|
5 |
Стеклотекстолит СТ1 толщиной 0.5мм |
— |
2 |
— |
1 |
|
Общая толщина изоляции на паз |
— |
— |
2,20 |
7,40 |
|
|
Разбухание изоляции |
— |
— |
0,10 |
0,45 |
|
|
Допуск на укладку |
— |
— |
0,20 |
0,2 |
|
|
6 |
Клин |
— |
— |
— |
5 |
|
Всего |
— |
— |
10,93 |
43,35 |
27. Уточненное значение плотности тока в проводнике обмотки статора

28. Проверка индукции в зубце статора (приближенно)

 — коэффициент
заполнения пакета для лакированных листов толщиной
— коэффициент
заполнения пакета для лакированных листов толщиной 
29. Проверка индукции в ярме статора (приближенно)

 — расчетный
коэффициент полюсного перекрытия
— расчетный
коэффициент полюсного перекрытия

 и
и  находятся в
допустимых пределах
находятся в
допустимых пределах
30. Перепад температуры в изоляции паза
 -теплопроводность изоляции
– для изоляции, выполненной по способу «монолит»,
-теплопроводность изоляции
– для изоляции, выполненной по способу «монолит», 
 -коэффициент
добавочных потерь
-коэффициент
добавочных потерь
31. Градиент температуры в изоляции паза

32. Витки фазы обмотки статора

33. Шаг обмотки

где

34. Коэффициент укорочения шага

35. Коэффициент распределения обмотки статора

36. Обмоточный коэффициент

Воздушный зазор и полюсы ротора
37. Исходя из заданного из заданного отношения  по графику находим
по графику находим 
Приближенное значение воздушного зазора

где

38. Принимаем воздушный зазор под серединой полюса равным  (3,5мм). Зазор над
краями полюса
(3,5мм). Зазор над
краями полюса 

39. Ширина полюсного наконечника определяется

 — коэффициент
полюсного перекрытия(конструктивный)
— коэффициент
полюсного перекрытия(конструктивный)
40. Радиус дуги полюсного наконечника

41. Высота полюсного наконечника при

42. Длина сердечника полюса и полюсного наконечника

43. Расчетная длина сердечника полюса. Принимаем 

 — толщина одной
нажимной щеки полюса
— толщина одной
нажимной щеки полюса
44. Предварительная высота полюсного сердечника

45. Коэффициент рассеяния полюсов находится

 — коэффициент,
зависящий от высоты полюсного наконечника
— коэффициент,
зависящий от высоты полюсного наконечника
46. Ширина полюсного сердечника определяется

 — коэффициент заполнения
полюса сталью толщиной 0,5 [мм]
— коэффициент заполнения
полюса сталью толщиной 0,5 [мм]
Так как
 , то принимаем
крепление полюсов шпильками к ободу магнитного колеса.
, то принимаем
крепление полюсов шпильками к ободу магнитного колеса.
47. Длина ярма (обода) ротора

 — для средних машин
— для средних машин
48. Минимальная высота ярма ротора

Принимаем  ; hj
уточняем по чертежу.
; hj
уточняем по чертежу.

Пусковая обмотка
49. Число стержней пусковой обмотки на полюс

50. Поперечное сечение стержня пусковой обмотки

51. Диаметр стержня, материал стержня – медь;

Выбираем  , тогда
, тогда 
52. Зубцовый шаг на роторе. Принимаем 

53. Проверяем условие


Пазы ротора круглые, полузакрытые.
54. Диаметр паза ротора

Раскрытие паза 
55. Длина стержня

56. Сечение короткозамыкающегося сегмента

По таблице выбираем
прямоугольную медь 
Расчет магнитной цепи
Для магнитопровода
статора выбираем сталь марки 1511 толщиной 0,5 мм. Полюсы ротора выполняются из
стали марки Ст3 толщиной 0,5. Крепление полюсов к ободу магнитного колеса
осуществляется с помощью шпилек и гаек. Толщина обода (ярма ротора) принимают 
57. Магнитный поток в зазоре

При  и
и  находим
находим  и
и 
58. Уточненное значение расчетной длины статора

где


59. Индукция в воздушном зазоре, [Тл],

60. Коэффициент воздушного зазора статора

61. Коэффициент воздушного зазора ротора

62. Коэффициент воздушного зазора

63. Магнитное напряжение воздушного зазора,[А],

64. Ширина зубца статора на высоте 1/3hП1 от его коронки


65. Индукция в сечении зубца на высоте 1/3hП1, [Тл],

66. Магнитное напряжение зубцов статора, [А],

67. Индукция в спинке статора, [Тл],

68. Магнитное напряжение спинки статора, [А],


69. Высота зубца ротора

70. Ширина зубца ротора по высоте 1/3hП1 от его коронки

71. Индукция в зубце ротора, [Тл],

72. Магнитное напряжение зубцов ротора, [А],

73. Удельная магнитная проводимость рассеяния между внутренними поверхностями сердечника полюсов

74. Удельная магнитная проводимость между внутренними поверхностями полюсных наконечников

где

75. Удельная магнитная проводимость рассеяния между торцевыми поверхностями

76. Удельная магнитная проводимость для потока рассеяния

77. Магнитное напряжение ярма статора, зазора и зубцов полюсного наконечникa, [А],

78. Поток рассеяния полюса, [Вб],

79. Поток в сечении полюса у его основания, [Вб],

80. Индукция в полюсе, [Тл],

81. Магнитное напряжение полюса, [A],

где:

 расчетная длина
силовой линии в полюсе, м;
расчетная длина
силовой линии в полюсе, м;
82. Магнитное напряжение стыка между полюсом и ярмом ротора, [A],

83. Индукция в ободе магнитного колеса (ярме ротора), [Тл],

84. Магнитное напряжение в ободе магнитного колеса, [A],

где:

85. Сумма магнитных напряжений сердечника полюса, ярма ротора и стыка между полюсом и ярмом, [A],

86. Сумма магнитных напряжений всех участков магнитной цепи
Выбор электродвигателя и расчет его рабочих параметров
Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка».
Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной).
На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей.
Типы электрических двигателей
Двигатели постоянного тока
Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором.
Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте.
Синхронные двигатели
Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ=1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу.
При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт.
Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки.
Асинхронные двигатели
По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты.
В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой.
После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности.
Мощность и моменты
В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов.
- Вентилятор

где Q [м3/с] – производительность вентилятора,
Н [Па] – давление на выходе вентилятора,
ηвент, ηпер – КПД вентилятора и передаточного механизма соответственно,
kз – коэффициент запаса.
- Насос

где Q [м3/с] – производительность насоса,
g=9,8 м/с2 – ускорение свободного падения,
H [м] – расчетная высота подъема,
ρ [кг/м3] – плотность перекачиваемой жидкости,
ηнас, ηпер – КПД насоса и передаточного механизма соответственно,
kз – коэффициент запаса.
- Поршневой компрессор

где Q [м3/с] – производительность компрессора,
А [Дж/м3] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м3 давлением 1,1·105 Па до требуемого давления,
ηкомпр, ηпер – КПД компрессора и передаточного механизма соответственно,
kз – коэффициент запаса.
Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места.
Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением

Полная мощность, потребляемая из сети:
для двигателей постоянного тока (она же активная)

для двигателей переменного тока

при этом потребляемые активная и реактивная мощности соответственно

В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть.
Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности.
Напряжение и ток
При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди.
Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует.
Режим работы
Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы.
- Продолжительный S1 – режим работы при постоянной нагрузке в течение времени, за которое температура двигателя достигает установившегося значения. Мощность двигателя, работающего в данном режиме, рассчитывается исходя из потребляемой механизмом мощности. Формулы расчета мощности некоторых механизмов (насос, вентилятор, компрессор) приведены выше.
- Кратковременный S2 – режим, при котором за время включения на постоянную нагрузку температура двигателя не успевает достичь установившегося значения, а за время отключения двигатель охлаждается до температуры окружающей среды. В случае использования двигателя S1 для работы в режиме S2 необходимо проверить его только по перегрузочной способности, так как температура не успевает достичь допустимого значения.
- Повторно-кратковременный S3 – режим с периодическим отключением двигателя, при котором за время включения температура не успевает достичь установившегося значения, а за время отключения – температуры окружающей среды. Расчет мощности электродвигателя обычного исполнения для работы в режиме S3 производится по методам эквивалентных величин с учетом пауз и потерь в переходных режимах. Кроме того, двигатель необходимо проверить на допустимое число включений в час. В случае большого числа включений в час рекомендуется использовать двигатели с повышенным скольжением. Данные электродвигатели обладают повышенным сопротивлением обмотки ротора, а, следовательно, меньшими пусковыми и тормозными потерями.
- Повторно-кратковременный с частыми пусками S4 и повторно-кратковременный с частыми пусками и электрическим торможением S5. Данные режимы рассматриваются аналогично режиму S3.
- Перемежающийся S6 – режим, при котором работа двигателя под нагрузкой, периодически заменяется работой на холостом ходу. Большинство двигателей, работающих в продолжительном режиме, имеют меняющийся график нагрузки.
При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин.
Класс энергоэффективности
В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия

где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети.
Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3.

Рис. 1. Классы энергоэффективности
Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя.
Степень защиты IP, виды климатических условий и категорий размещения
ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин.
Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55).

Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55.
Категория размещения обозначается цифрой:
1 – на открытом воздухе;
2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков;
3 – в закрытых помещениях без искусственного регулирования климатических условий;
4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями.
Климатические условия:
У – умеренный климат;
УХЛ – умеренно холодный климат;
ХЛ – холодный климат;
Т – тропический климат.
Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды.
Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым.
Усилия, действующие на вал двигателя со стороны нагрузки
Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор).
Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами.
Особенности конструкции двигателя при работе от преобразователя частоты
В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором.
При использовании частотно-регулируемого привода достигается:
1. экономия электроэнергии;
2. плавность пуска и снижение пусковых токов;
3. увеличение срока службы двигателя.
В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя.
При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима.
Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм.
Примечание
Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Расчет реактивной мощности синхронного двигателя
В данном примере нужно определить реактивную мощность, которую генерирует синхронный двигатель серии СТМ-800-2 на напряжение 6 кВ мощностью 800 кВт.
Исходные данные
Технические характеристики на двигатель принимаются согласно [Л1, с.204] либо по каталогу завода-изготовителя:
- Номинальная активная мощность на валу двигателя – Рн = 800 кВт;
- Коэффициент полезного действия (КПД) – ηн = 0,941;
- Коэффициент мощности – cosφн=0,9;
Решение
1. Определяем коэффициент реактивной мощности синхронного двигателя, зная значение cosϕн=0,9:
2. Определяем реактивную мощность синхронного двигателя по выражению 35 [Л2, с.55]:
3. Для прикидочных расчетов номинальную реактивную мощность синхронного двигателя можно, определить по выражению 36 [Л2, с.55]:
Qн = 0,5*Рн = 0,5*800 = 400 квар
Как видно из результатов расчета, значения не сильно отличаются.
Также хотел бы добавить, что при генерации реактивной мощности синхронными двигателями возникают активные потери.
4. Для прикидочных расчетов потери активной мощности при генерации реактивной мощности можно приближенно подсчитать, исходя из к.п.д. двигателя по выражению 39 [Л2, с.56]:
Литература:
- Режимы работы, релейная защита и автоматика синхронных электродвигателей. М.И.Слодарж, 1977 г.
- Реактивная мощность (2-е издание) Минин Г.П. 1978 г.
Поделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Проектирование синхронной машины с постоянными магнитами, страница 8
— устранить паразитный воздушный зазор между магнитопроводом и обмоткой;
— исключить возможность повреждения обмотки при протаскивании;
— исключить магнитную ассимметрию магнитопровода относительно постоянного магнита.
Улучшение технологии происходит за счет ухудшения магнитных характеристик магнитопровода.
1.3 Получить навыки про проектированию синхронной машины с постоянными магнитами. Ознакомиться с существующими методиками. Разработать техническое задание одной из них.
Существует множество методик по расчету синхронных машин с постоянными магнитами. Главным недостатком является получение только приближенных результатов, потому что процессы преобразования энергии в данном виде машин сложен и мало изучен.
Техническое задание на проектирование:
Синхронный двигатель с постоянными магнитами:
Номинальная
мощность, кВт —  ;
;
Номинальное
фазное напряжение, В –  ;
;
Частота
вращения, об/мин —  ;
;
Коэффициент
мощности, о.е. —  ;
;
Коэффициент
полезного действия, % —  ;
;
Количество
фаз —  .
.
Расчет:
Определение главных размеров и выбор электромагнитных нагрузок.
К главным размерам электрической машины относятся диаметр расточки статора и расчетная длина воздушного зазора.
Электромагнитный момент синхронного двигателя, Н/м
 ,
,
где  — номинальная мощность, Вт;
— номинальная мощность, Вт;  — номинальная частота вращения, об/мин;
— номинальная частота вращения, об/мин;  — коэффициент полезного действия, о.е;
— коэффициент полезного действия, о.е;  — коэффициент мощности;
— коэффициент мощности;  — коэффициент учитывающий разницу между
ЭДС и напряжением.
— коэффициент учитывающий разницу между
ЭДС и напряжением.
Расчетная длина воздушного зазора, м
 ,
,
где  — расчетный коэффициент полюсного
перекрытия;
— расчетный коэффициент полюсного
перекрытия;  — линейная нагрузка, А/м;
— линейная нагрузка, А/м;  — индукция в воздушном зазоре, Тл;
— индукция в воздушном зазоре, Тл;  — диаметр расточки статора, м
— диаметр расточки статора, м
 — остаточная индукция, Тл.
— остаточная индукция, Тл.
Для своей
машины я выбрал магниты с  Тл и
Тл и  А/м.
А/м.
Полюсное деление, м

Магнитный рабочий поток (предварительно), Вб

Ток фазы, А

Зубцовый шаг на статоре, м
 ,
,
где  — количество пазов на статоре (выбирается
по рекомендации).
— количество пазов на статоре (выбирается
по рекомендации).
Расчет геометрии статора.
Выбираем для данного вида машины трапецеидальные пазы полузакрытые.
ЭДС холостого хода, В
 ,
,
где  — фазное напряжение, В;
— фазное напряжение, В;  .
.
Магнитный поток, соответствующий ЭДС в режиме нагрузки, Вб

Предварительное число витков
 ,
,
где  — коэффициент формы поля;
— коэффициент формы поля;  — обмоточный коэффициент;
— обмоточный коэффициент;  — частота питающей сети, Гц.
— частота питающей сети, Гц.
Число витков обмотки катушки

Выбор
плотности тока, 

Сечение эффективного проводника, мм2

где а – число параллельных ветвей обмотки, nэл – число элементарных проводников в одном эффективном.
Ширина зубца статора, м

Площадь паза, м2

где кз – коэффициент заполнения паза медью; Wк – количество витков в катушке обмотки.
Ширина паза в нижней части, м
Я выбрал трапецеидальные пазы.

где bщ1 – ширина открытия паза, м; hщ1 – высота открытия паза, м.
Ширина паза верхней части, м

где bс – припуск на расшлихтовку, м.
Высота паза в штампе, м

где hс – припуск на расшлихтовку, м.
Высота клиновой части паза, м

Полная высота паза, м

Площадь паза под обмотку в свету, м

Уточненный коэффициент заполнения паза

Высота ярма обода статора, м

Внешний диаметр сердечника ротора, м

Выбор воздушного зазора и расчет геометрии ротора.
Величина воздушного зазора, м

Диаметр ротора, м

Ширина магнита, м

Длина магнита, м
Высота магнита, м

Высота ярма обода ротора, м

Минимальное расстояние между магнитами, м

Внутренний диаметр обода ротора, м

Расчет проводимостей рассеяния ротора (магнитов)
Проводимость рассеяния фиктивного электромагнита, сердечник которого имеет ту же конфигурацию, что и постоянный магнит, Вб/А
где 
Коэффициент, учитывающий снижение потоков рассеяния из-за малой проницаемости магнитов и неравномерного распределения н.с. по высоте магнита
 ,
,
где 
Проводимость полюсов (на один полюс), Вб/А

Расчет магнитной цепи.
Расчет магнитной цепи производиться с учетом конструктивного исполнения ротора для нескольких значений ЭДС. Рекомендуемые значения выбираются в зависимости от Е0 , соответствующей индукции магнита в режиме холостого хода

Ширина полюсного наконечника, м

Для ротора с радиальным расположением магнитов без полюсного наконечника, ширина полюсного наконечника, м
Синхронный двигатель
Принцип действия синхронного двигателя. Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя. Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток . Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС
. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС  и
и  .
.
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС  , которая направлена против напряжения сети
, которая направлена против напряжения сети  . Сумма ЭДС
. Сумма ЭДС  с учётом падения напряжения на активном сопротивлении обмотки статора
с учётом падения напряжения на активном сопротивлении обмотки статора  уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.

Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6). В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора. В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
 , (4.4)
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что=0).
Векторная диаграмма синхронного двигателя. Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол  от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности .
.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где
, где  — угол сдвига фаз между током и ЭДС.
— угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок  , где
, где  —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
—масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя .
.
Механический момент на валу двигателя ,
,
(4.5)
где  — угловая скорость ротора; Мтах =
— угловая скорость ротора; Мтах =  — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
— максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя. Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС  остаются неизменными (рис. 14.17).
остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что , конец вектора токаскользит по прямой cd.
, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), = , ток
, ток  отстаёт по фазе
отстаёт по фазе  от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =
 и ток
и ток  является чисто активным.
является чисто активным.
Наоборот, при перевозбуждении  и вектор тока
и вектор тока  опережает по фазе вектор напряжения ,
опережает по фазе вектор напряжения ,  , ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при
, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при  .
.
U – образные характеристики. Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.

Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей. Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Расчет синхронных двигателей с шихтованными полюсами. Расчет параметров и характеристик синхронных двигателей с массивным гладким ротором, страница 11
Ток возбуждения СД можно представить как геометрическую сумму двух составляющих:
 (34)
(34)
где Ifа — составляющая тока возбуждения, зависящая от активной составляющей тока статора, о.е.; Ifк— ток возбуждения в режиме работы СД фазокомпенсатором, когда ток статора можно считать реактивным, о.е.:
 (35)
(35)
где Ifо – ток возбуждения холостого хода СД при Uн. Ifо»0,435 о.е.
Из выражений (34), (35) следует, что в номинальном режиме
 (36)
(36)
где Ifан — активная составляющая тока возбуждения в номинальном режиме СД, о.е.
В режиме, отличном от номинального, имеем
 (37)
(37)
 (38)
(38)
Подставляя (35) и (38) в (34) получим:
 (39)
(39)
С учетом (32) можем записать выражение для функции If=f(a):
 (40)
(40)
Функция, обратная (40) a=f(If) называется U-образной характеристикой СД и отражает зависимость реактивной мощности, отдаваемой или потребляемой из сети, от тока возбуждения.

На величину реактивной мощности СД, как видно из (40), влияют текущая активная нагрузка двигателя, его номинальные параметры и рабочее напряжение на выводах двигателя.
Рабочее задание
1. Подготовить исходные данные в соответствии с вариантом задания.
2. Провести расчеты параметров и пусковых характеристик СДМР на ЭВМ.
3. Получить распечатку расчета.
4. Построить пусковые характеристики СДШП P=f(s), Q=f(s), I=f(s), M=f(s).
5. Исследовать влияния напряжения и нагрузки на валу двигателя на его U-образную характеристику:
— построить графики характеристики Q=f(If) при различных значениях напряжения на выводах двигателя Uсд и коэффициенте загрузки.
— используя полученные характеристики Q=f(If) при заданных U* и b построить графики зависимости If=f(U*) и If=f(b) при одном значении реактивной мощности двигателя в режиме перевозбуждения.
Ход работы.
1. Запустить на выполнение программу MCAD.
2. Загрузить в MCAD файл СХЕМА_СДМР.MCD.
3. Задать значения каталожных параметров синхронного двигателя согласно варианта (табл. 1) в соответствующих переменных.
4. Выполнить расчет параметров схемы замещения, убедиться, что погрешность расчета параметров Мв, Iп не превышает 0,001.
5. Убедиться, что расчетные значения параметров Iп, Мв, Мп совпадают с каталожными значениями.
6. Вывести на печать результаты расчетов параметров схемы замещения, пусковые и U-образные характеристики синхронного двигателя.
Указания по оформлению отчета
Отчет по работе должен содержать описание цели работы, распечатку результатов расчета, а также графики пусковых характеристик P=f(s), Q=f(s), I=f(s), M=f(s).В конце отчета должны быть написаны выводы по результатам исследований.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Вольдек А.И. Электрические машины. Л.; Энергия, 1978.
2. Гамазин С.И., Понаровкин Д.Б., Цырук С.А. Переходные процессы в электродвигательной нагрузке систем промышленного электроснабжения. М.; Московский энергетический институт, 1991.
3. Першина Л.М., Бак С.И., Першин Ю.М., Читипаховян С.П. Применение электродвигателей в нефтяной промышленности. М.; Недра, 1980.
ПРИЛОЖЕНИЕ
Таблица П3.
Варианты задания к лабораторным работам №1-3
Расчет синхронных двигателей с шихтованными полюсами. Расчет параметров и характеристик синхронных двигателей с массивным гладким ротором
ЛАБОРАТОРНАЯ РАБОТА № 1
РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК АСИНХРОННЫХ ДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Объект исследования и цель работы
Объектом исследования в настоящей лабораторной работе являются асинхронные двигатели с короткозамкнутым ротором (АДК).
Цель работы: изучение методов расчета параметров схемы замещения, параметров режима и пусковых характеристик АДК; исследование этих параметров для реальных АДК; закрепление навыков работы на ПЭВМ при расчетах по готовой программе.
Общая характеристика АДК
АДК, благодаря своей простоте и надежности, являются наиболее распространенным промышленным потребителем электрической энергии. АДК подключаются к системе электроснабжения (СЭС) и используется в качестве привода промышленных механизмов.
Основными параметрами режима АДК являются: активная Р и реактивная Q мощности, потребляемые АДК из электрической сети, ток статорной обмотки I1, электромагнитный момент на валу АДК Мэ в установившемся режиме, равный моменту сопротивления механизма Ммех, частота вращения ротора АДК w, скольжение ротора АДК, равное
 (1)
(1)
где wс — синхронная частота вращения ротора АДК.
Схема замещения АДК представлена на рис.1. Параметрами схемы замещения являются R1, Xs1 — активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки; R2, Xs2 — активное сопротивление и индуктивное сопротивление рассеяния обмотки ротора, приведенные к статорной обмотке; X12 — индуктивное сопротивление взаимоиндукции между обмотками статора и ротора.
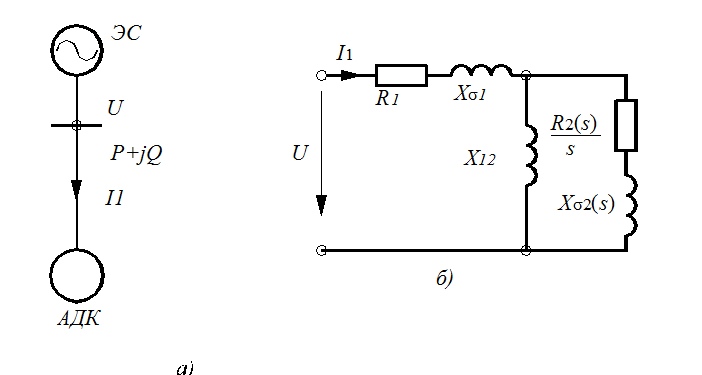
Рис.1. Схема подключения (а) и схема замещения (б) АДК
В схеме замещения АДК необходимо учитывать поверхностный эффект, т.е. вытеснение тока в обмотке ротора. Степень вытеснения тока определяется частотой наводимых в роторе токов, которая определяется скольжением двигателя.
Изменение сопротивлений эквивалентного обмотки ротора в схеме замещения за счет вытеснения тока хорошо описывается следующими зависимостями:
 (2)
(2)
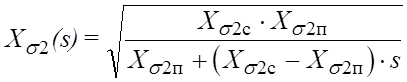 (3)
(3)
где R2п, Xs2п, R2c, Xs2с — активные и индуктивные сопротивления рассеяния обмотки ротора соответственно при пуске (s=1) и в синхронном режиме (s=0).
АДК характеризуется следующими каталожными данными:
Pн — номинальная мощность на валу двигателя, кВт;
Uн — номинальное напряжение, кВ;
cosjн — номинальный коэффициент мощности;
hн — номинальный коэффициент полезного действия, % ;
wн, wс — номинальная и синхронная частота вращения, об/мин;
Mп — кратность пускового (при s=1) момента;
Мм — кратность максимального момента;
Iп — кратность пускового тока.
Параметры схемы замещения и режима АДК удобно выражать в относительных единицах при следующих базисных условиях:
Sб=Sн — номинальная полная мощность АДК;
Uб=Uн — номинальное напряжение статорной обмотки АДК;
Mэ — электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента.
Основные параметрами режима АДК могут быть определены через параметры схемы замещения и скольжение по следующим выражениям:
 (4)
(4)
где  — сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
— сопротивление,
сопряженное комплексному входному сопротивлению схемы замещения АДК в
соответствии со схемой замещения (рис.1) равное:
 (5)
(5)
Sн — номинальная полная мощность АДК, равная
 (6)
(6)
Зависимости от скольжения P(s), Q(s), I(s), M(s) при номинальном напряжении на выводах двигателя называются пусковыми характеристиками АДК.
Основными расчетными параметрами АДК также являются:
синхронное индуктивное сопротивление АДК
Xc= Xs1+X12 (7)
сверхпереходное индуктивное сопротивление АДК
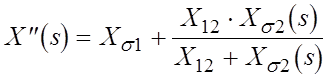 (8)
(8)
электромагнитная постоянная времени обмотки ротора при короткозамкнутой статорной обмотке
 (9)
(9)
где X2’ — индуктивное сопротивление обмотки ротора при короткозамкнутой статорной обмотке
 (10)
(10)
Расчетные параметры АДК X” и Т2’ зависят от скольжения в связи с вытеснением тока в обмотке ротора.
Алгоритм расчета параметров схемы замещения АДК
Параметрами схемы замещения являются следующие параметры: R1, R2п , R2c, Xs1, X12, Xs2п, Xs2с. Их необходимо определить через каталожные данные АДК. Активное сопротивление статорной обмотки можно определить, исходя из потерь мощности в этой обмотке в номинальном режиме. В относительных единицах R1=DPст.
Для АДК потери в статорной обмотке составляют относительно устойчивую долю (в среднем 0.3) от общих потерь активной мощности в номинальном режиме, поэтому
Что такое синхронный двигатель? — Определение, конструкция, работа и ее особенности
Определение: Двигатель, работающий с синхронной скоростью, известен как синхронный двигатель. Синхронная скорость — это постоянная скорость, при которой двигатель создает электродвижущую силу. Синхронный двигатель используется для преобразования электрической энергии в механическую.
Конструкция синхронного двигателя
Статор и ротор — две основные части синхронного двигателя.Статор становится неподвижным и несет обмотку якоря двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе индуцируется ЭДС . Вращатель несет обмотки возбуждения. В роторе наводится основной поток поля. Ротор имеет две конструкции: ротор с явнополюсным ротором и ротор с невыпадающими полюсами.
В синхронном двигателе используется ротор с явнополюсным ротором. Слово выступ означает, что полюса ротора выступают в сторону обмоток якоря .Ротор синхронного двигателя выполнен из листовой стали. Пластины уменьшают потери на вихревые токи, возникающие в обмотке трансформатора. Ротор с явнополюсным ротором в основном используется для создания средне- и тихоходных двигателей. Для получения в двигателе используется высокоскоростной цилиндрический ротор.
Синхронный двигатель работает
Статор и ротор — две основные части синхронного двигателя. Статор — это неподвижная часть, а ротор — это вращающаяся часть машины.Трехфазное питание переменного тока подается на статор двигателя.
Статор и ротор возбуждаются отдельно. Возбуждение — это процесс создания магнитного поля на частях двигателя с помощью электрического тока.
Когда на статор подается трехфазное питание, между статором и зазором ротора возникает вращающееся магнитное поле. Поле, имеющее подвижную полярность, известно как вращающееся магнитное поле. Вращающееся магнитное поле возникает только в многофазной системе.Из-за вращающегося магнитного поля на статоре развиваются северный и южный полюса.
Ротор возбуждается источником постоянного тока. Источник постоянного тока наводит на ротор северный и южный полюса. Поскольку питание постоянного тока остается постоянным, магнитный поток на роторе остается неизменным. Таким образом, поток имеет фиксированную полярность. Северный полюс развивается на одном конце ротора, а южный — на другом.
Переменный ток синусоидальный. Полярность волны меняется каждые полупериод, т.е.е. волна остается положительной в первой половине цикла и становится отрицательной во второй половине цикла. Положительный и отрицательный полупериоды волны развивают северный и южный полюсы статора соответственно.
Когда ротор и статор имеют одинаковые полюса на одной стороне, они отталкиваются друг от друга. Если у них противоположные полюса, они притягиваются друг к другу. Это легко понять с помощью рисунка, показанного ниже. 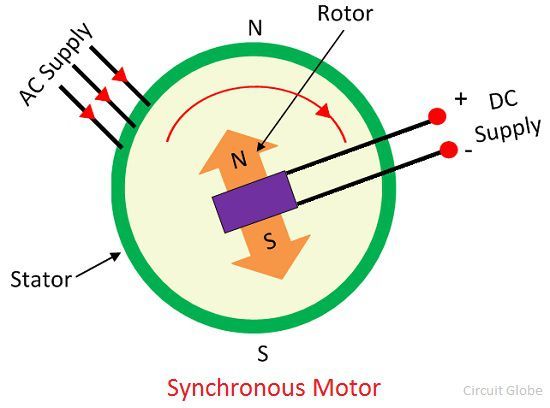 Ротор притягивается к полюсу статора в течение первой половины цикла питания и отталкивается во второй половине цикла.Таким образом, ротор начинает пульсировать только в одном месте. Это причина, по которой синхронный двигатель не запускается автоматически.
Ротор притягивается к полюсу статора в течение первой половины цикла питания и отталкивается во второй половине цикла.Таким образом, ротор начинает пульсировать только в одном месте. Это причина, по которой синхронный двигатель не запускается автоматически.
Первичный двигатель используется для вращения двигателя. Первичный двигатель вращает ротор с синхронной скоростью. Синхронная скорость — это постоянная скорость машины, значение которой зависит от частоты и числа полюсов машины.
Когда ротор начинает вращаться с синхронной скоростью, первичный двигатель отключается от двигателя.И питание постоянного тока подается на ротор, из-за чего северный и южный полюс развиваются на их концах
Северный и южный полюса ротора и статора взаимно блокируются. Таким образом, ротор начинает вращаться со скоростью вращающегося магнитного поля. И двигатель работает с синхронной скоростью. Скорость двигателя можно изменить только путем изменения частоты источника питания.
Основные характеристики синхронного двигателя
- Скорость синхронного двигателя не зависит от нагрузки, т.е.е. изменение нагрузки не влияет на скорость двигателя.
- Синхронный двигатель не запускается автоматически. Первичный двигатель используется для вращения двигателя с их синхронной скоростью.
- Синхронный двигатель работает как с опережающим, так и с запаздывающим коэффициентом мощности.
Синхронный двигатель также может быть запущен с помощью демпферных обмоток.
.КриваяВ синхронного двигателя
Кривая В представляет собой график зависимости тока статора от тока возбуждения для различных постоянных нагрузок. График, построенный между током якоря I и током возбуждения и током возбуждения I f , при холостом ходе представляет собой кривую V Curve . Так как форма этих кривых похожа на букву «V», они называются V-образной кривой синхронного двигателя.
Коэффициент мощности синхронного двигателя можно регулировать путем изменения тока возбуждения I f . Как известно, ток якоря I a изменяется с изменением тока возбуждения I f . Предположим, что двигатель работает без нагрузки. Если ток возбуждения увеличивается от этого небольшого значения, ток якоря Ia уменьшается до тех пор, пока ток якоря не станет минимальным. В этой минимальной точке двигатель работает с единичным коэффициентом мощности. Двигатель работает с запаздывающим коэффициентом мощности, пока не достигнет этой точки работы.
Если теперь ток возбуждения увеличивается, ток якоря увеличивается, и двигатель начинает работать с опережающим коэффициентом мощности. График между током якоря и током возбуждения известен как V-образная кривая. Если эту процедуру повторять для различных повышенных нагрузок, получается семейство кривых.
Кривые В синхронного двигателя показаны ниже.
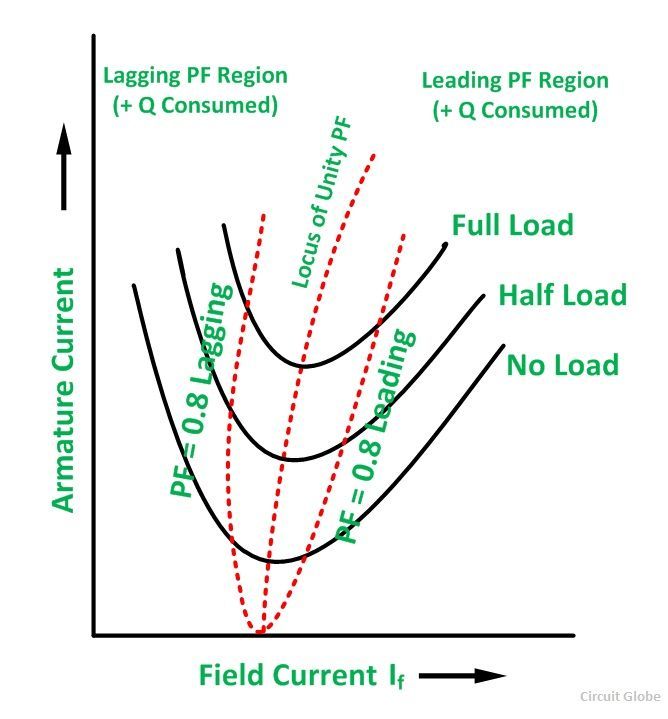 Точка, в которой возникает единичный коэффициент мощности, находится в точке, где ток якоря минимален.Кривая, соединяющая самые низкие точки всех V-образных кривых для различных уровней мощности, называется кривой для расчета коэффициента мощности Unity . Кривые сложения для отставания коэффициента мощности 0,8 и опережения коэффициента мощности 0,8 показаны на рисунке выше красной пунктирной линией.
Точка, в которой возникает единичный коэффициент мощности, находится в точке, где ток якоря минимален.Кривая, соединяющая самые низкие точки всех V-образных кривых для различных уровней мощности, называется кривой для расчета коэффициента мощности Unity . Кривые сложения для отставания коэффициента мощности 0,8 и опережения коэффициента мощности 0,8 показаны на рисунке выше красной пунктирной линией.
Места точек постоянного коэффициента мощности на V-образных кривых называются кривыми Compounding Curves . На нем показано, каким образом следует изменять ток возбуждения, чтобы поддерживать постоянный коэффициент мощности при изменении нагрузки.Точки справа и слева от единичного коэффициента мощности соответствуют избыточному возбуждению и опережающему току, а также недостаточному возбуждению и запаздывающему току соответственно.
Кривые V полезны при настройке тока возбуждения. Увеличение тока возбуждения, если оно превышает уровень минимального тока якоря, приводит к опережающему коэффициенту мощности. Точно так же уменьшение тока возбуждения ниже минимального значения тока якоря приводит к запаздыванию коэффициента мощности. Видно, что ток возбуждения при единичном коэффициенте мощности при полной нагрузке больше, чем ток возбуждения при единичном коэффициенте мощности без нагрузки.
На рисунке ниже показан график между коэффициентом мощности и током возбуждения при различных нагрузках.
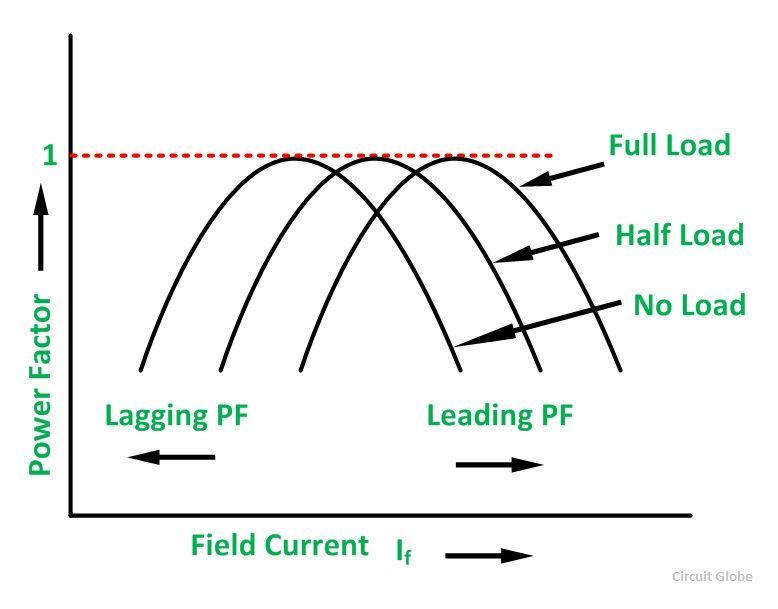
Из приведенного выше рисунка видно, что если синхронный двигатель при полной нагрузке работает с единичным коэффициентом мощности, то снятие нагрузки на валу заставляет двигатель работать с опережающим коэффициентом мощности.
.Что такое метод синхронного импеданса — измерения, вычисления и допущения
Метод с синхронным импедансом Метод или метод ЭДС основан на концепции замены эффекта реакции якоря мнимым реактивным сопротивлением. Для расчета регулирования синхронный метод требует следующих данных: они представляют собой сопротивление якоря по фазе и характеристику разомкнутой цепи. Характеристика разомкнутой цепи представляет собой график напряжения цепи и тока возбуждения.Этот метод также требует характеристики короткого замыкания, которая представляет собой график короткого замыкания и тока возбуждения.
Состав:
Для синхронного генератора следующее уравнение приведено ниже
Где,
Для расчета синхронного импеданса измеряется Z s , а затем вычисляется значение E a . По значениям E , и V рассчитывается регулировка напряжения.
Измерение синхронного импеданса
Измерение синхронного импеданса выполняется следующими методами. Они известны как
.- Испытание сопротивления постоянному току
- Проверка обрыва цепи
- Тест на короткое замыкание
Испытание сопротивления постоянному току
В этом испытании предполагается, что генератор переменного тока соединен звездой с разомкнутой обмоткой возбуждения постоянного тока, как показано на принципиальной схеме ниже.
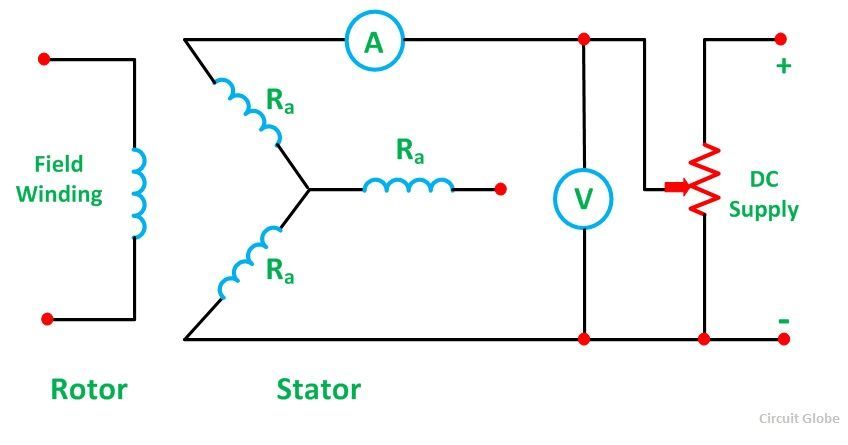 Он измеряет сопротивление постоянному току между каждой парой клемм либо с помощью метода амперметра-вольтметра, либо с помощью моста Уитстона.Взято среднее из трех наборов значений сопротивления R t . Значение R t делится на 2, чтобы получить значение сопротивления постоянному току на фазу. Поскольку эффективное сопротивление переменному току больше сопротивления постоянному току из-за скин-эффекта. Следовательно, эффективное сопротивление переменному току для каждой фазы получается путем умножения сопротивления постоянному току на коэффициент от 1,20 до 1,75 в зависимости от размера машины. Типичное значение для использования в расчетах — 1,25.
Он измеряет сопротивление постоянному току между каждой парой клемм либо с помощью метода амперметра-вольтметра, либо с помощью моста Уитстона.Взято среднее из трех наборов значений сопротивления R t . Значение R t делится на 2, чтобы получить значение сопротивления постоянному току на фазу. Поскольку эффективное сопротивление переменному току больше сопротивления постоянному току из-за скин-эффекта. Следовательно, эффективное сопротивление переменному току для каждой фазы получается путем умножения сопротивления постоянному току на коэффициент от 1,20 до 1,75 в зависимости от размера машины. Типичное значение для использования в расчетах — 1,25.
Тест на разрыв цепи
В испытании на обрыв цепи для определения синхронного импеданса генератор переменного тока работает с номинальной синхронной скоростью, а клеммы нагрузки остаются разомкнутыми.Это означает, что нагрузки отключены, а ток возбуждения установлен на ноль. Принципиальная схема показана ниже.
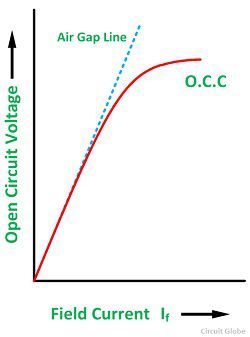
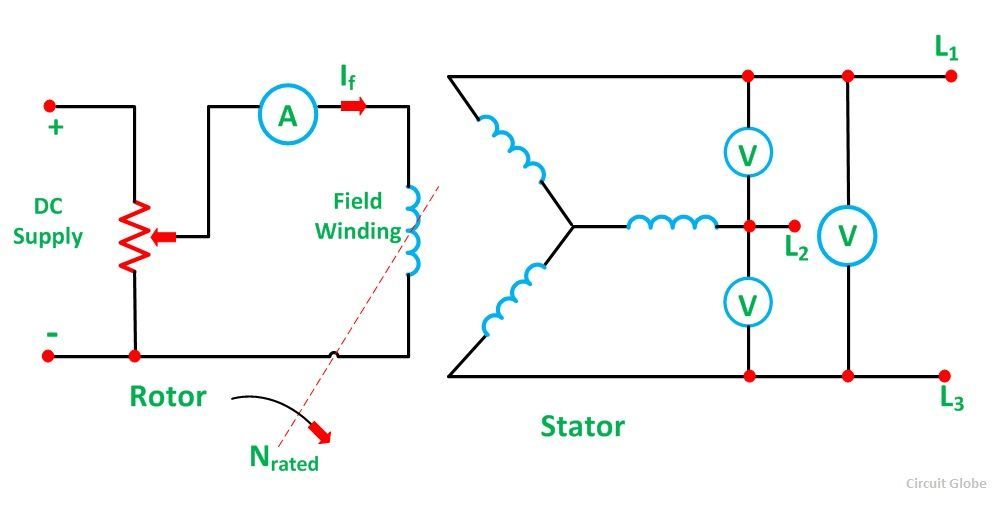 После установки нулевого тока возбуждения ток возбуждения постепенно увеличивается. Напряжение на клеммах E t измеряется на каждом шаге. Ток возбуждения может быть увеличен до 25% от номинального напряжения. Построен график между фазным напряжением холостого хода E p = E t / √3 и током возбуждения I f .Таким образом, кривая называется характеристикой разомкнутой цепи (O.C.C). Форма такая же, как у нормальной кривой намагничивания. Линейная часть O.C.C расширяется, образуя линию воздушного зазора.
После установки нулевого тока возбуждения ток возбуждения постепенно увеличивается. Напряжение на клеммах E t измеряется на каждом шаге. Ток возбуждения может быть увеличен до 25% от номинального напряжения. Построен график между фазным напряжением холостого хода E p = E t / √3 и током возбуждения I f .Таким образом, кривая называется характеристикой разомкнутой цепи (O.C.C). Форма такая же, как у нормальной кривой намагничивания. Линейная часть O.C.C расширяется, образуя линию воздушного зазора.
Характеристика разомкнутой цепи (O.C.C) и линия воздушного зазора показаны на рисунке ниже.
Тест на короткое замыкание
В тесте на короткое замыкание клеммы якоря закорочены на три амперметра, как показано на рисунке ниже.
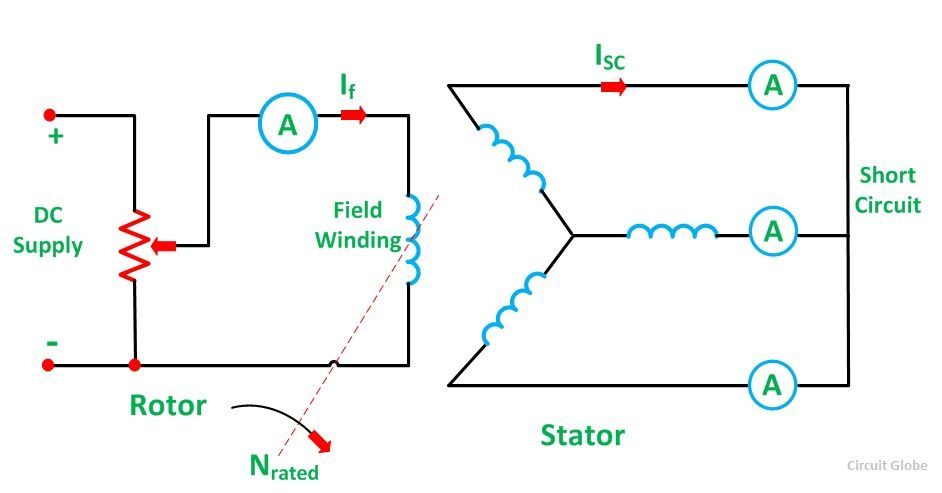 Перед запуском генератора ток возбуждения следует уменьшить до нуля. Каждый амперметр должен иметь диапазон, превышающий номинальное значение полной нагрузки. После этого генератор работает на синхронной скорости. То же, что и при испытании на обрыв цепи, когда ток возбуждения постепенно увеличивается, а ток якоря измеряется на каждом шаге. Ток возбуждения увеличивают, чтобы получить токи якоря до 150% от номинального значения.
Перед запуском генератора ток возбуждения следует уменьшить до нуля. Каждый амперметр должен иметь диапазон, превышающий номинальное значение полной нагрузки. После этого генератор работает на синхронной скорости. То же, что и при испытании на обрыв цепи, когда ток возбуждения постепенно увеличивается, а ток якоря измеряется на каждом шаге. Ток возбуждения увеличивают, чтобы получить токи якоря до 150% от номинального значения.
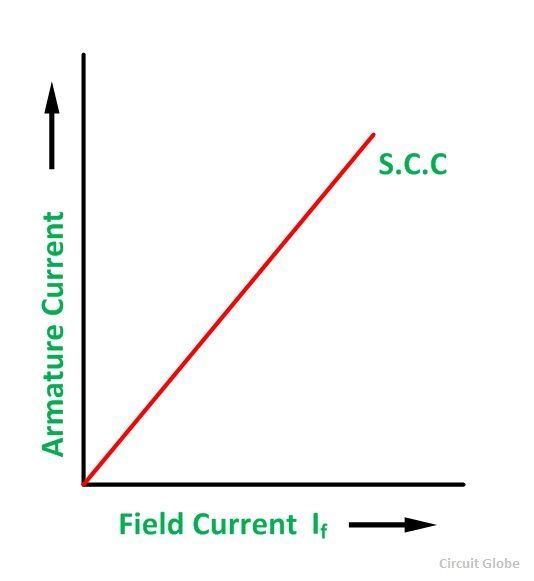
Измеряется значение тока возбуждения If и среднее значение трех показаний амперметра на каждом шаге.Построен график между током якоря Ia и током возбуждения If. Полученная таким образом характеристика называется Характеристика короткого замыкания (S.C.C) . Эта характеристика представляет собой прямую линию, как показано на рисунке ниже.
Расчет синхронного импеданса
Следующие шаги приведены ниже для расчета синхронного импеданса.
- Характеристики холостого хода и характеристики короткого замыкания нанесены на одну кривую.
- Определите значение тока короткого замыкания I sc и получите номинальное напряжение генератора на каждую фазу.
- Синхронный импеданс Z S будет равен напряжению холостого хода, деленному на ток короткого замыкания при том токе возбуждения, который дает номинальную ЭДС на фазу.
 Синхронное реактивное сопротивление определяется как
Синхронное реактивное сопротивление определяется как
График показан ниже.
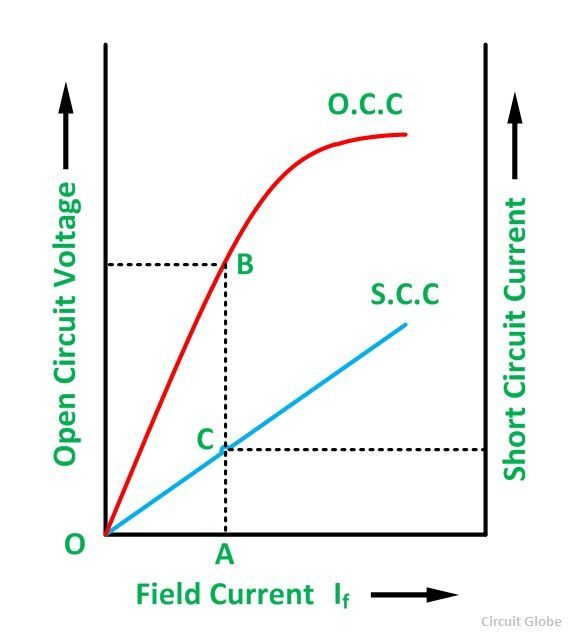 Из приведенного выше рисунка рассмотрим ток возбуждения I f = OA, который создает номинальное напряжение генератора на фазу.В соответствии с этим током возбуждения напряжение холостого хода составляет AB
Из приведенного выше рисунка рассмотрим ток возбуждения I f = OA, который создает номинальное напряжение генератора на фазу.В соответствии с этим током возбуждения напряжение холостого хода составляет AB
Следовательно,
Допущения в методе синхронного импеданса
Ниже приведены следующие допущения, сделанные в методе синхронного импеданса.
- Синхронный импеданс постоянный
Синхронный импеданс определяется из O.C.C и S.C.C . Это отношение напряжения холостого хода к току короткого замыкания.Когда O.C.C и S.C.C линейны, синхронный импеданс Z S равен , постоянному .
- Поток в условиях испытаний такой же, как и в условиях нагрузки.
Предполагается, что заданное значение тока возбуждения всегда создает одинаковый поток. Это предположение вносит существенную ошибку. Когда якорь закорочен, ток в якоре отстает от генерируемого напряжения почти на 90 градусов, и, следовательно, реакция якоря почти полностью размагничивает.
- Влияние потока реакции якоря можно заменить падением напряжения, пропорциональным току якоря, и что падение напряжения реакции якоря добавляется к падению напряжения реактивного сопротивления якоря.
- Магнитное сопротивление потоку якоря постоянно независимо от коэффициента мощности.
Для машины с цилиндрическим ротором это предположение в основном верно из-за равномерного воздушного зазора. Регулирование, полученное с помощью метода синхронного импеданса, выше, чем при реальной нагрузке.Следовательно, этот метод также называется пессимистическим методом .
При более низких возбуждениях Z S — это постоянная , так как характеристики разомкнутой цепи совпадают с линией воздушного зазора. Это значение Z S называется линейным или ненасыщенным синхронным импедансом . Однако с увеличением возбуждения эффект насыщения заключается в уменьшении Z S и значений за пределами линейной части разомкнутой цепи, называемых Насыщенное значение синхронного импеданса.
.Разница между асинхронным двигателем и синхронным двигателем
Разница между асинхронным двигателем и Синхронный двигатель объясняется с помощью различных факторов, например типа возбуждения, используемого в машине. Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование и области применения. частота.
| ОСНОВА РАЗЛИЧИЯ | СИНХРОННЫЙ ДВИГАТЕЛЬ | ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Тип возбуждения | Синхронный двигатель — это машина с двойным возбуждением. | Асинхронный двигатель — это машина с одним возбуждением. |
| Система питания | Обмотка якоря питается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Его обмотка статора запитана от источника переменного тока. |
| Скорость | Он всегда работает с синхронной скоростью. Скорость не зависит от нагрузки. | При увеличении нагрузки скорость асинхронного двигателя уменьшается. Она всегда меньше синхронной скорости. |
| Запуск | Это не самозапуск. Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости. | Асинхронный двигатель имеет самозапускающийся момент. |
| Эксплуатация | Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. |
| Использование | Может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| КПД | Он более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. | Его КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Стоимость | Синхронный двигатель дороже асинхронного двигателя той же мощности и номинального напряжения | Асинхронный двигатель дешевле синхронного двигателя той же мощности и номинального напряжения. |
Асинхронный двигатель также известен как асинхронный двигатель . Он называется так потому, что никогда не работает с синхронной скоростью. то есть N s = 120f / P. Асинхронный двигатель является наиболее широко используемым двигателем во всех домашних и коммерческих двигателях. Синхронный двигатель всегда следует синхронной скорости. Скорость вращения ротора поддерживается или синхронизируется с током питания
.Разница между трехфазным асинхронным двигателем и синхронным двигателем
- Трехфазный синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.
- Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель
- всегда работает с синхронной скоростью, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает со скоростью меньше синхронной. Если нагрузка увеличилась, скорость асинхронного двигателя уменьшается.
- Асинхронный двигатель имеет самозапускающийся крутящий момент, тогда как синхронный двигатель не самозапускается.Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости.
- Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение. Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности асинхронного двигателя становится очень низким.
- Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к подаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок.
- Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения.
- Синхронный двигатель дороже асинхронного двигателя той же мощности и номинального напряжения.
