| Степень | Диапазон, °С | Релейный | Исполнение | Назначение |
ТермостатTМ1 | IP 20 | 0-30 | 250/16 | Электронный | Комнатный |
ТермостатTA3 | IP 20 | 5-30 | 250/16 | Электромеханический | Комнатный |
ТермостатTC3 | IP 40 | -30-30 | 250/10 | Электромеханический | Капиллярный |
ТермостатTA | IP 54 | 0-40 | 250/10 | Электромеханический | Комнатный |
ТермостатTC3 | IP 40 | -30-30 | 250/10 | Электромеханический | Для охлаждения |
ТермостатBRC | IP 20 | 20-90 | 250/15 | Биметаллический | Накладной |
ТермостатTC2 | IP 40 | 0-90 | 250/10 | Электромеханический | Погружной |
ТермостатTLSC | IP 40 | 0-90 | 250/10 | Электромеханический | Погружной сдвоенный |
ТермостатTR2 | IP 20 | 0-90 | 250/10 | Электромеханический | Регулируемый |
ТермостатLS1** | IP 20 | 90-110 | 250/15 | Электромеханический | Предохранительный |
| |||||
* Существует три исполнения термостата: | |||||
| — c выключателем и индикаторной лампочкой; | ||||
— c индикаторной лампочкой; | |||||
— без выключателя и индикаторной лампочки. | |||||
** Существует исполнение термостата с фиксированной температурой 100°С. | |||||
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В.
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k).
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.
Далее устанавливаем переменные резисторы, стабилизатор и все разъемы, заканчивая большими электролитическими конденсаторами. Транзисторы T1 и T2 оставляем на самый конец.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Датчик температуры холостого хода | Датчики температуры
Регулятор холостого хода
(РХХ 2112-1148300-02)
Регулятор холостого хода (см. Фото-1) является устройством, которое необходимо в системе для стабилизации оборотов холостого хода двигателя. РХХ представляет из себя шаговый электродвигатель с подпружиненной конусной иглой. Во время работы двигателя на холостом ходу, за счет изменения проходного сечения дополнительного канала подачи воздуха в обход закрытой заслонки дросселя, в двигатель поступает, необходимое для его стабильной работы, количество воздуха.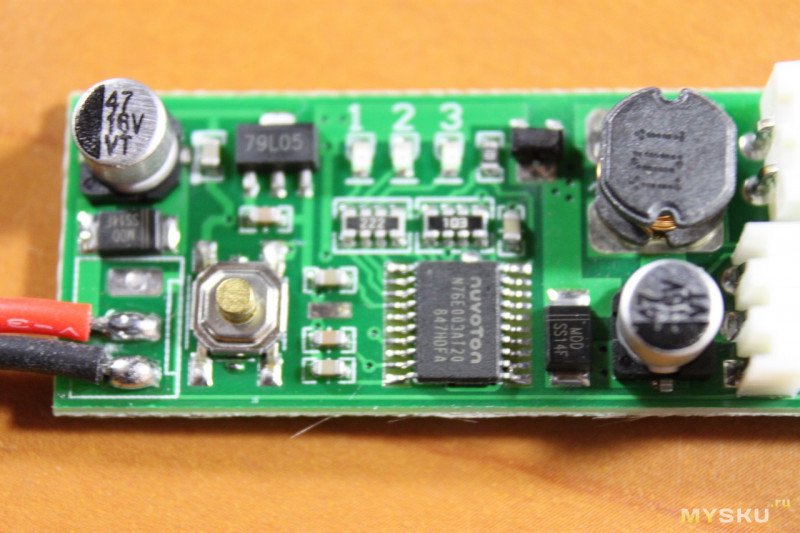
Этот воздух учитывается датчиком массового расхода воздуха (ДМРВ) и, в соответствии с его количеством, контроллер осуществляет подачу топлива в двигатель через топливные форсунки. По датчику положения коленчатого вала (ДПКВ) контроллер отслеживает количество оборотов двигателя и в соответствии с режимом работы двигателя управляет РХХ,таким образом добавляя или снижая подачу воздуха в обход закрытой дроссельной заслонки (см. Фото-2 и Фото-3). На прогретом до рабочей температуры двигателе контроллер поддерживает обороты холостого хода. Если же двигатель не прогрет, контроллер за счет РХХ увеличивает обороты и, таким образом, обеспечивает прогрев двигателя на повышенных оборотах коленвала. Данный режим работы двигателя позволяет начинать движение автомобиля сразу и не прогревая двигатель.
Регулятор холостого хода установлен на корпусе дроссельной заслонки (см. Фото-4) и крепится к нему двумя винтами. К сожалению, на некоторых автомобилях головки этих крепежных винтов могут быть рассверлены или винты посажены на лак, что может значительно усложнить демонтаж РХХ для его замены или прочистки воздушного канала.
В таких случаях редко удается обойтись без демонтажа всего корпуса дроссельной заслонки.
РХХ является исполнительным устройством и его самодиагностика в системе не предусмотрена. Поэтому при неисправностях регулятора холостого хода лампа «CHECK ENGINE» не загорается.
Симптомы неисправностей РХХ во многом схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки), но во втором случае чаще всего на неисправность ДПДЗ явно указывает лампа «CHECK ENGINE».
К неисправностям регулятора холостого хода можно отнести следующие симптомы: неустойчивые обороты двигателя на холостом ходу, самопроизвольное повышение или снижение оборотов двигателя, остановка работы двигателя при выключении передачи, отсутствие повышенных оборотов при запуске холодного двигателя, снижение оборотов холостого хода двигателя при включении нагрузки (фары, печка и т.д.).
Для демонтажа регулятора холостого хода необходимо при выключенном зажигании отключить его четырехконтактный разъем и отвернуть два крепежных винта. Монтаж РХХ производят в обратной последовательности, но предварительно проверив расстояние от фланца до конечной точки конусной иглы, которое должно быть 23 мм. Кроме того, уплотнительное кольцо на фланце следует смазать моторным маслом.
Монтаж РХХ производят в обратной последовательности, но предварительно проверив расстояние от фланца до конечной точки конусной иглы, которое должно быть 23 мм. Кроме того, уплотнительное кольцо на фланце следует смазать моторным маслом.
none Опубликована: 2002 г. 0 0
Повышенные обороты холостого хода — Энциклопедия японских машин
С наступлением зимы на многих автостоянках можно,наверное, услышать такой разговор :-Вчера вот поставил машину на стоянку, все было нормально. А сегодня утром завел – обороты не скидывает. Держит более тысячи…
Что примечательно — наиболее часто эта проблема возникает именно с наступлением холодов. И можно почти уверенно сказать, что не надо искать причину в неисправности «механической части». Причина в другом и лежит она почти на поверхности.
Электронный блок управления ( ECU ) в своей работе учитывает показания множества датчиков, но одним из основных можно назвать Датчик Температуры. Датчик температуры ( THW ) представляет собой обыкновенный терморезистор, меняющий свое сопротивление в зависимости от температуры. Например, при температуре охлаждающей жидкости минус 10 градусов у него сопротивление около 5-6 Ком, а при температуре плюс 80 градусов – уже в пределах 300 Ом.Блок управления очень внимательно «следит» за изменениями этого сопротивления. Алгоритм работы у него довольно простой: чем ниже температура двигателя, тем больше надо подать топлива в цилиндры. Это самое «больше» достигается увеличением времен открывания форсунок. При минус 10 градусах, например, ECU открывает форсунки на 2,5 мс, а при плюс 80 градусах – на 1,2 мс.
Например, при температуре охлаждающей жидкости минус 10 градусов у него сопротивление около 5-6 Ком, а при температуре плюс 80 градусов – уже в пределах 300 Ом.Блок управления очень внимательно «следит» за изменениями этого сопротивления. Алгоритм работы у него довольно простой: чем ниже температура двигателя, тем больше надо подать топлива в цилиндры. Это самое «больше» достигается увеличением времен открывания форсунок. При минус 10 градусах, например, ECU открывает форсунки на 2,5 мс, а при плюс 80 градусах – на 1,2 мс.
Машины выпуска 1990 года и последующие стали намного «умнее» своих предшественников. На более «продвинутых» моделях мы не увидим на дроссельной заслонке винта байпасного канала. Он уже не нужен, потому что все делает электроника. В том числе – прогрев машины и установка холостого хода. Включив зажигание мы «оживляем» блок управления, который за доли секунды успевает выполнить массу операций.
Произвести проверку цепей и при неисправности какой-либо «записать» себе в память эту неисправность в виде цифрового кода.
«Опросить» все основные датчики, сенсоры и сравнить полученные значения с теми, что имеются у него в памяти и одновременно подготовиться к запуску двигателя.
Итак, мы запустили двигатель. Он еще холодный и блок управления «понимает» это, потому что датчик температуры показывает большое сопротивление. Форсунки открываются на более большое время, в цилиндры поступает больше топлива. Одновременно с этим блок управления. опираясь на те же показания датчика температуры управляет и количеством воздуха через шестиконтактный серводвигатель, установленный на корпусе воздушной заслонки. И топлива, и воздуха в цилиндры «подается» ровно столько, сколько требуется при данной температуре.
Все эти параметры «записаны» в памяти блока управления и отправной точной для них являются показания датчика температуры.Мы стоим, курим, двигатель прогревается и температура датчика повышается –его сопротивление снижается и одновременно с этим уменьшается количество подаваемого топлива и воздуха. Обороты двигателя снижаются. И так продолжается до тех пор, пока показания датчика температуры не станут минимальными, то есть такими, при которых блок управления «поймет», что двигатель уже прогрелся и «выставит» обороты холостого хода.
Обороты двигателя снижаются. И так продолжается до тех пор, пока показания датчика температуры не станут минимальными, то есть такими, при которых блок управления «поймет», что двигатель уже прогрелся и «выставит» обороты холостого хода.
Однако это в «идеале». Так должно быть. В нашем же случае такого не получилось, на машине клиента двигатель «устойчиво» держал 1.100 оборотов.Проверяем температурные режимы – двигателя и датчика температуры. В «простых» условиях температуру двигателя можно приблизительно определить по стрелке температурного прибора на панели. Вне зависимости от того, какого типа у вас прибор (бывают вертикального и горизонтального расположения) – стрелка должна находиться или ровно посередине шкалы или чуть-чуть ниже.Это значит, что двигатель уже прогрет. А теперь переходим к датчику температуры и измеряем его сопротивление. Весьма желательно при этом пользоваться мультиметром. Смотрим на шкалу – 420 Ом.
Естественно, что при таком сопротивлении обороты двигателя будут повышенными, потому что блок управления «думает», что двигатель еще не прогрет. Почему такое случилось, в чем причина?
Почему такое случилось, в чем причина?
Т е р м о с т а т
Да-да, причина именно в нем, а не в «глубокой электронике». В 80-ти случаях из ста после его снятия и внимательного осмотра выясняется, что термостат просто-напросто «подклинивает» — на поверхности его термоэлемента видна блестящая потертость. Все правильно: термостат «перепускал», датчик температуры не успевал нагреваться и блок управления «думал», что двигатель еще холодный. После замены термостата обороты холостого хода пришли в норму.Хочется добавить еще одно замечание по «правильной» замене охлаждающей жидкости. Многие автовладельцы совершенно не обращают внимание на расширительный бачок ( к нему еще идет трубочка от радиатора ). И зря.
При замене жидкости заливают «Тосол» только в радиатор, не удосуживаясь заглянуть в расширительный бачок. А если там пусто. В этом случае происходит вот что. при нагреве двигателя жидкость расширяется и ее избыток «выдавливается» из системы охлаждения в расширительный бачок.
После остановки двигателя и его охлаждении жидкость начинает «втягиваться» обратно в систему охлаждения. И если в бачке нет жидкости или ее мало, то система охлаждения начнет «завоздушиваться», что чревато или недопрогревом печки или перегревом двигателя. Особенно это актуально для дизельных двигателей 2 L — T и всех Mitsubishi – при неправильном температурном режиме у них «лопаются перегородки» между клапанами.
При выборе и покупке термостата многие автовладельцы «утыкаются» в такой вопрос: «по каталогу положен такой-то, а его-то в этот самый момент в продаже и нет. И не предвидится. Что делать?». В этой ситуации можно посоветовать вот что – основной параметр термостата — его температура открывания, номиналы которой выдавлены на кольце или «донышке».
Далее — диаметр и высота. Впрочем на последнее — высоту термостата можно не сильно обращать внимание, потому что в «теле» двигателя всегда есть запас. Выбирайте по температуре. диаметру и смело устанавливайте – работать будет, проверено. Одно время мы даже устанавливали на Toyota термостаты от Nissan со смещенным центром. И все работало нормально, претензий от клиентов не было.
Одно время мы даже устанавливали на Toyota термостаты от Nissan со смещенным центром. И все работало нормально, претензий от клиентов не было.
Владимир КУЧЕР, город Южно-Сахалинск
- Перепечатка разрешается только с разрешения автора и при условии размещения ссылки на источник
Высокие обороты холостого хода
Адрес: Удмуртия, Сарапул Сообщений 2,409
Высокие обороты холостого хода
Вот такая проблема.
Началось, когда ниже 0 стало. Обороты утром при заводке 1400, потом через 1 мин. падают до 1200. И так держатся весь день 1100-1200. НО почему-то вчера опять была норма 800-900 (-20 град. на улице).
Когда чистил клапан холостого хода, то порвал немного прокладку бумажную между дроссельной заслонкой и впускн. коллектором. Замазал герметиком. Может герметик отошел и через щель в прокладке воздух «лишний» идет.
Или датчмк температуры накрылся. С ними вообще неразбериха какая-то. В одной из тем это уже обсуждалось. По экзисту у меня их 3. Но я нашел всего 2. Причем один не там где нарисован на картинке в existe.
По экзисту у меня их 3. Но я нашел всего 2. Причем один не там где нарисован на картинке в existe.
Еще вопрос на 4E-FE датчик детонации есть? Если нет, то наверное за датчик детонации я принял датчик температуры.
Автоматический регулятор оборотов для мини-дрели.
При работе с выводными компонентами приходится изготавливать печатные платы с отверстиями, это, пожалуй, одна из самых приятных частей работы, и, казалось бы, самая простая. Однако, очень часто при работе микродрель приходится то отложить в сторону, то снова взять ее в руки, чтобы продолжить работу. Микродрель лежащая на столе во включенном состоянии создает довольно много шума из-за вибрации, к тому же она может слететь со стола, а зачастую и двигатели прилично нагреваются при работе на полную мощность. Опять же, из-за вибрации довольно трудно точно прицеливаться при засверливании отверстия и нередко бывает так, что сверло может соскользнуть с платы и проделать борозду на соседних дорожках.
Решение проблемы напрашивается следующее: нужно сделать так, чтобы микродрель имела маленькие обороты на холостом режиме, а при нагрузке частота вращения сверла увеличивалась. Таким образом, нужно реализовать следующий алгоритм работы: без нагрузки – патрон крутится медленно, свело попало в кернение — обороты возросли, прошло насквозь – обороты снова упали. Самое главное, что это очень удобно, во-вторых двигатель работает в облегченном режиме, с меньшим нагревом и износом щеток.
Таким образом, нужно реализовать следующий алгоритм работы: без нагрузки – патрон крутится медленно, свело попало в кернение — обороты возросли, прошло насквозь – обороты снова упали. Самое главное, что это очень удобно, во-вторых двигатель работает в облегченном режиме, с меньшим нагревом и износом щеток.
Ниже приведена схема такого автоматического регулятора оборотов, обнаруженная в интернете и немного доработанная для расширения функционала:
После сборки и тестирования выяснилось, что под каждый двигатель приходится подбирать новые номиналы элементов, что совершенно неудобно. Также добавили разрядный резистор (R4) для конденсатора, т.к. выяснилось, что после отключения питания, а особенно при отключённой нагрузке, он разряжается довольно долго. Изменённая схема пробрела следующий вид:
Автоматический регулятор оборотов работает следующим образом — на холостых оборотах сверло вращается со скоростью 15-20 оборотов/мин. , как только сверло касается заготовки для сверления, обороты двигателя увеличиваются до максимальных. Когда отверстие просверлено и нагрузка на двигатель ослабевает, обороты вновь падают до 15-20 оборотов/мин.
, как только сверло касается заготовки для сверления, обороты двигателя увеличиваются до максимальных. Когда отверстие просверлено и нагрузка на двигатель ослабевает, обороты вновь падают до 15-20 оборотов/мин.
Собранное устройство выглядит следующим образом:
На вход подается напряжение от 12 до 35 вольт, к выходу подключается микродрель, после чего резистором R3 выставляется требуемая частота вращения на холостом ходу и можно приступать к работе. Здесь следует отметить, что для разных двигателей регулировка будет отличаться, т.к. в нашей версии схемы был упразднен резистор, который требовалось подбирать для установки порога увеличения оборотов.
Транзистор Т1 желательно размещать на радиаторе, т.к. при использовании двигателя большой мощности он может довольно сильно нагреваться.
Ёмкость конденсатора C1 влияет на время задержки включения и отключения высоких оборотов и требует увеличения если двигатель работает рывками.
Самым важным в схеме является номинал резистора R1, от него зависит чувствительность схемы к нагрузке и общая стабильность работы, к тому же через него протекает почти весь ток, потребляемый двигателем, поэтому он должен быть достаточно мощным. В нашем случае мы сделали его составным, из двух одноваттных резисторов.
В нашем случае мы сделали его составным, из двух одноваттных резисторов.
Печатная плата регулятора имеет размеры 40 х 30 мм и выглядит следующим образом:
Скачать рисунок платы в формате PDF для ЛУТ: «скачать» (При печати указывайте масштаб 100%).
Весь процесс изготовления и сборки регулятора для минидрели занимает около часа.
После травления платы и очистки дорожек от защитного покрытия (фоторезиста или тонера, в зависимости от выбранного метода изготовления платы) необходимо засверлить в плате отверстия под компоненты (обратите внимание на размеры выводов различных элементов).
Сверлить отверстия рекомендуется со стороны дорожек, а для того, чтобы компоненты было легче устанавливать – со стороны деталей все отверстия необходимо немного раззенковать сверлом большего диаметра (3-4 мм).
Затем дорожки и контактные площадки покрываются флюсом, что очень удобно делать при помощи флюс-аппликатора, при этом достаточно флюса СКФ или раствора канифоли в спирте.
После лужения платы расставляем и припаиваем компоненты. Автоматический регулятор оборотов для микродрели готов к эксплуатации.
Данное устройство было проверено с несколькими видами двигателей, парой китайских различной мощности, и парой отечественных, серии ДПР и ДПМ – со всеми типами двигателей регулятор работает корректно после подстройки переменным резистором. Важным условием является чтобы он был в хорошем состоянии, т.к. плохой контакт щеток с коллектором двигателя может вызывать странное поведение схемы и работу двигателя рывками. На двигатель желательно установить искрогасящие конденсаторы и установить диод для защиты схемы от обратного тока при отключении питания.
Список компонентов для автоматического регулятора оборотов
Фото
Наименование
Кол-во
Наличие
Цена
1
Нет в наличии
7,26
2
2-3 Дня
6,89
»
Ошибка, запрос не может выполниться:
ERROR: SELECT items. *, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE items.seo_name = ‘UNKNOWN_PLACEHOLDER_sef_rewrite=1’ ORDER BY id DESC LIMIT 0, 1000Ошибка, запрос не может выполниться:
ERROR: SELECT items.*, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE items.seo_old_name = ‘UNKNOWN_PLACEHOLDER_sef_rewrite=1’ ORDER BY id DESC LIMIT 0, 1000Ошибка, запрос не может выполниться:
ERROR: SELECT * FROM `pa_iblock_categories` WHERE id = UNKNOWN_PLACEHOLDER_0Ошибка, запрос не может выполниться:
SELECT COUNT(*) FROM `pa_comments`
WHERE item_type = ‘iblock’ AND ERROR: item_id = UNKNOWN_PLACEHOLDER_0Ошибка, запрос не может выполниться:
SELECT items. *, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE ERROR: items.iblock_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.category_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.id != UNKNOWN_PLACEHOLDER_0 ORDER BY added_dt desc LIMIT 0, 5ttp://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd»>
*, users.login AS author, categories.title AS category,
categories.seo_name AS category_seo_name, iblocks.iblock_name
FROM `pa_iblock_items` AS items
LEFT JOIN `pa_users` AS users ON users.id = items.user_id
LEFT JOIN `pa_iblock_categories` AS categories ON categories.id = items.category_id
LEFT JOIN `pa_iblocks` AS iblocks ON iblocks.id = items.iblock_id
WHERE ERROR: items.iblock_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.category_id = UNKNOWN_PLACEHOLDER_0 AND ERROR: items.id != UNKNOWN_PLACEHOLDER_0 ORDER BY added_dt desc LIMIT 0, 5ttp://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd»>
Почему на холодном двигателе высокие обороты. 7 главных причин повышенных оборотов хх на холодную
Высокие обороты на холодную могут появиться как в штатном режиме работы двигателя, так и при выходе из строя некоторых его датчиков. В последнем случае на инжекторных двигателях необходимо выполнить проверку регулятора холостого хода, датчика положения дроссельной заслонки, датчика температуры охлаждающей жидкости, впускного коллектора. У карбюраторных бензиновых двигателей также нужно проверить регулировку холостого хода, работу воздушной заслонки, камеры карбюратора.
У карбюраторных бензиновых двигателей также нужно проверить регулировку холостого хода, работу воздушной заслонки, камеры карбюратора.
Содержание:
Работа ДВС на прогревочных оборотах
В общем случае высокие обороты на холодном двигателе в холодную погоду — явление нормальное. Однако их значение и продолжительность работы мотора в таком режиме может быть разным. Так, если запустить двигатель при температуре, например, от +20°С и выше, то время, когда значение оборотов холостого хода вернется к указанному в мануале (приблизительно 600…800 оборотов в минуту) составит несколько секунд (2…5 секунд в летнее время и около 5…10 секунд в зимнее). Если этого не происходит — значит, есть поломка, и необходимо выполнять дополнительную проверку и соответствующие ремонтные меры.
Что касается запуска бензинового двигателя на холодную при температуре, например, –10°С, то высокие прогревочные обороты будут приблизительно в два раза превышать указанные производителем обороты холостого хода. Соответственно, чем ниже будет температура — тем время возвращения к нормальным холостым оборотам будет выше.
Соответственно, чем ниже будет температура — тем время возвращения к нормальным холостым оборотам будет выше.
Высокие обороты при запуске двигателя на холодную необходимо по двум причинам. Первая — постепенный прогрев моторного масла, и соответственно, уменьшения его вязкости. Вторая — постепенный нагрев двигателя до нормальной рабочей температуры охлаждающей жидкости, составляющей около +80°С…+90°С. Это достигается увеличением количества сжигаемого топлива.
Поэтому, появление больших оборотов при запуске двигателя на холодную — нормальное явление. Однако необходимо учитывать их значение и время, через которые они возвращаются к значению, соответствующему холостому ходу. Значения оборотов и времени указываются в технической документации к конкретному автомобилю. Если обороты и/или время возвращения увеличены — значит, необходимо искать причину поломки.
Причина высоких оборотов двигателя на холостом ходу
Выделяют аж четырнадцать причин, почему на холодном двигателе большие обороты длительное время после запуска. В частности:
В частности:
- Дроссельная заслонка. Воздух может попадать в двигатель через приподнятую дроссельную заслонку, когда, например, тросик ее привода перетянут (если он предусмотрен конструкцией). В этом случае на холостом ходу в двигатель попадает больше чем необходимо количество воздуха, что, собственно, и приводит к тому, что при холодном запуске высокие обороты.
Еще один вариант — использование жесткого коврика на полу, который может подпирать педаль газа при том, что водитель не нажимает на нее. В этом случае обороты также будут повышенными, причем не только при холодном, но и при прогретом моторе.
Дроссельная заслонка может полностью не закрываться по причине того, что она очень сильно загрязнена нагаром. В этом случае он попросту не даст ей плотно прилегать. - Канал холостого хода. У всех карбюраторных моделей двигателей конструкция предусматривает наличие воздушного канала в обход дроссельной заслонки. Сечение канала регулируется специальным регулировочным болтом.
 Соответственно, при неправильной настройке сечения канала через канал холостого хода будет проходить большее чем необходимо количество воздуха, что и приведет к тому, что на холодную большие обороты двигателя. Правда, подобная ситуация может быть и «на горячую».
Соответственно, при неправильной настройке сечения канала через канал холостого хода будет проходить большее чем необходимо количество воздуха, что и приведет к тому, что на холодную большие обороты двигателя. Правда, подобная ситуация может быть и «на горячую». - Воздушный канал для поддержания высоких оборотов холодного двигателя. Этот канал перекрывается при помощи штока или заслонки. Соответственно, положение штока или угол наклона заслонки зависит от температуры антифриза в системе охлаждения (то есть, по сути, температуры двигателя).
При холодном двигателе канал полностью открыт, и соответственно, через него поступает большое количество воздуха, обеспечивая повышенные обороты на холодную. По мере прогревания двигателя канал перекрывается. Если шток или заслонка не полностью перекрывают поступление дополнительной порции воздуха, то это и приведет к повышенным оборотам двигателя. - Воздушный канал впускного коллектора. В разных конструкциях двигателей он перекрывается серводвигателем, импульсным электродвигателем, электромагнитным клапаном либо соленоидом с импульсным управлением. При выходе из строя указанных элементов воздушный канал не будет перекрыт должным образом, и соответственно, через него будет проходить большое количество воздуха во впускной коллектор.
- Трубки впускного коллектора. Зачастую лишний воздух в систему поступает по причине разгерметизации патрубков либо мест их присоединения. Обычно это можно определить по исходящему оттуда свисту.
- У некоторых автомобилей, например «Тойота», конструкция двигателя предусматривает использование электродвигателей принудительного повышения оборотов холостого хода. Их модели и методы управления различаются, однако все имеют отдельную систему управления. Поэтому проблема высоких оборотов на холостом ходу может быть связана либо с указанным электродвигателем, либо с системой его управления.
- Датчик положения дроссельной заслонки (ДПДЗ или TPS). Они бывают четырех видов, однако их основная задача передавать на блок управления двигателем информацию о том, в каком положении в конкретный момент времени находится заслонка. Соответственно, при неисправности ДПДЗ ЭБУ переходит в аварийный режим и дает команду на подачу максимального количества воздуха. Это приводит к образованию обедненной топливовоздушной смеси, а также высоким оборотам двигателя на холостом ходу. Зачастую при этом в режиме работы обороты могут «плавать». Обороты могут повышаться и при сбросе настроек работы дросселя.
- Регулятор холостого хода. Эти устройства бывают трех типов — соленоидные, шаговые и роторные. Обычно причинами неисправности РХХ является повреждение его направляющей иглы либо повреждение его электрических контактов.
- Датчик массового расхода воздуха (ДМРВ). При частичном или полном выходе из строя этого элемента на блок управления также будет подаваться некорректная информация о количестве подаваемого в двигатель воздуха. Соответственно, возможно возникновение ситуации, когда ЭБУ примет решение о большем или полном открытии дроссельной заслонки для увеличения поступления воздуха. Это естественным образом приведет к увеличению оборотов двигателя. При нестабильной работе ДМРВ обороты могут не только быть повышенными «на холодную», но и быть нестабильными при других режимах работы мотора.
- Датчик температуры всасываемого воздуха (ДТВВ, или IAT). Ситуация аналогичная другим датчикам. При поступлении от него некорректной информации на блок управления ЭБУ не может отдавать команды для формирования оптимальных оборотов и создания топливовоздушной смеси. Поэтому вполне вероятно, что при его неисправности могут появиться повышенные обороты на холостых.
- Датчик температуры охлаждающей жидкости. При выходе его из строя на ЭБУ будет подаваться информация (или формироваться в нем автоматически) о том, что тосол или антифриз еще недостаточно прогрелись, поэтому о двигатель будет работать на повышенных оборотах чтобы якобы прогреться до рабочей температуры.
- Снижение эффективности работы водяной помпы. Если по какой-либо причине снизилась ее производительность (она стала прокачивать недостаточное количество охлаждающей жидкости), например, износилась крыльчатка, то система прогрева холодного двигателя также будет работать неэффективно, и следовательно, мотор долго будет работать на повышенных оборотах. Дополнительным признаком этого является то, что печка в салоне греет только при нажатой педали газа, а на холостых оборотах она остывает.
- Термостат. При непрогретом двигателе он находится в закрытом состоянии, позволяя циркулировать ОЖ только по двигателю. При достижении антифризом рабочей температуры он открывается и жидкость дополнительно охлаждается проходя по полному кругу системы охлаждения. Но если жидкость изначально движется в таком режиме, то двигатель будет дольше работать на повышенных оборотах до полного прогревания. Причины неисправности термостата могут заключаться в том, что он заедает или полностью не закрывается.
- Электронный блок управления. В редких случаях причиной того, что при заводке двигателя высокие обороты может быть ЭБУ. В частности, сбой в работе его программного обеспечения либо механическое повреждение его внутренних составляющих.
 При выходе из строя указанных элементов воздушный канал не будет перекрыт должным образом, и соответственно, через него будет проходить большое количество воздуха во впускной коллектор.
При выходе из строя указанных элементов воздушный канал не будет перекрыт должным образом, и соответственно, через него будет проходить большое количество воздуха во впускной коллектор. Соответственно, при неисправности ДПДЗ ЭБУ переходит в аварийный режим и дает команду на подачу максимального количества воздуха. Это приводит к образованию обедненной топливовоздушной смеси, а также высоким оборотам двигателя на холостом ходу. Зачастую при этом в режиме работы обороты могут «плавать». Обороты могут повышаться и при сбросе настроек работы дросселя.
Соответственно, при неисправности ДПДЗ ЭБУ переходит в аварийный режим и дает команду на подачу максимального количества воздуха. Это приводит к образованию обедненной топливовоздушной смеси, а также высоким оборотам двигателя на холостом ходу. Зачастую при этом в режиме работы обороты могут «плавать». Обороты могут повышаться и при сбросе настроек работы дросселя. Это естественным образом приведет к увеличению оборотов двигателя. При нестабильной работе ДМРВ обороты могут не только быть повышенными «на холодную», но и быть нестабильными при других режимах работы мотора.
Это естественным образом приведет к увеличению оборотов двигателя. При нестабильной работе ДМРВ обороты могут не только быть повышенными «на холодную», но и быть нестабильными при других режимах работы мотора. Дополнительным признаком этого является то, что печка в салоне греет только при нажатой педали газа, а на холостых оборотах она остывает.
Дополнительным признаком этого является то, что печка в салоне греет только при нажатой педали газа, а на холостых оборотах она остывает.Как устранить высокие обороты на холодную
Устранение проблемы повышенных оборотов при заводке холодного двигателя всегда зависят от причин. Соответственно в зависимости от вышедшего из строя узла необходимо будет произвести ряд проверок и ремонтных мер.
Соответственно в зависимости от вышедшего из строя узла необходимо будет произвести ряд проверок и ремонтных мер.
Первым делом проверьте состояние дроссельной заслонки и ее работу. Со временем на ее поверхности скапливается значительное количество нагара, который стоит удалить при помощи карбклинера либо другого подобного чистящего средства. Как говорят: “В любой непонятной ситуации почисть заслонку дросселя”. А также может клинить шток в воздушном канале. В зависимости от конструкции конкретного двигателя их система управления может быть механической либо электронной.
Если конструкция подразумевает использование приводного тросика, то не лишним будет проверить его целостность, общее состояние, усилие натяжения. Когда управление заслонкой происходит при помощи различных электроприводов либо соленоидов, то стоит проверить сделать их проверку мультиметром. При подозрении на неисправность какого-либо из датчиков его стоит поменять на новый.
При соответствующих симптомах в обязательном порядке проверяют факт подсоса воздуха во впускном тракте в местах соединения.
Также стоит уделить внимание и системе охлаждения, в частности таким ее элементам как термостат и помпа. Неправильную работу термостата вы точно определите по плохой работе печки. А при проблемах с помпой будут видны подтеки либо посторонний шум.
Заключение
Необходимо понимать, что кратковременные высокие обороты на непрогретом двигателе — это нормальное явление. И чем ниже температура окружающего воздуха — тем больше времени повышенные обороты будут иметь место. Однако если время превышает приблизительно пять и более минут, то это уже повод выполнять диагностику. В первую очередь нужно просканировать память электронного блока управления на предмет наличия ошибок в нем. Это могут быть ошибки регулятора холостого хода или перечисленных выше датчиков. Если ошибок нет — нужно выполнять дополнительную механическую диагностику по описанным выше рекомендациям.
Спрашивайте в комментариях. Ответим обязательно!
Высокие обороты двигателя на холостом ходу: причины, последствия
Система регулировки холостого хода (ХХ) предназначена для поддержания оборотов движка в режиме ХХ в заданном диапазоне. Но не всегда все происходит в штатном режиме и возникающие проблемы, вызванные различными неисправностями, требуют принятия неотложных мер. Какие бывают ситуации? Двигатель, например, может запускаться только с нажатой педалью акселератора и глохнуть при ее отпускании. Или вместо нормальных оборотов в пределах 800-1000 об/мин стрелка на панели приборов показывает 1500, а то и все 3000 об/мин.
Но не всегда все происходит в штатном режиме и возникающие проблемы, вызванные различными неисправностями, требуют принятия неотложных мер. Какие бывают ситуации? Двигатель, например, может запускаться только с нажатой педалью акселератора и глохнуть при ее отпускании. Или вместо нормальных оборотов в пределах 800-1000 об/мин стрелка на панели приборов показывает 1500, а то и все 3000 об/мин.
Попробуем разобраться в причинах высоких оборотов на холостом ходу!
Карбюраторный ДВС
Несколько основных причин повышенных оборотов на холостом ходу:
- в первую очередь нужно проверить регулировку ХХ, которая может быть выставлена на подачу обогащенной топливной смеси;
- проверьте, до конца ли может открываться воздушная заслонка карбюратора;
- проверьте дроссельную заслонку карбюратора. Проблема может быть в том, что она или деформирована, или же нарушилась регулировка привода;
- проконтролируйте уровень бензина в поплавковой камере – он может быть чрезмерно высоким
Инжекторный двигатель
Причину повышенных оборотов угадать несложно – слишком богатая топливная смесь подается на цилиндры через форсунки. Если в авто с инжектором повышенный ХХ, то неисправность нужно искать по следующим направлениям:
Если в авто с инжектором повышенный ХХ, то неисправность нужно искать по следующим направлениям:
- проверьте работоспособность датчика (регулятора) ХХ;
- проконтролируйте работу датчика положения дроссельной заслонки;
- причиной повышенных оборотов ХХ может быть слетевшая возвратная пружина или заедание тросика дроссельной заслонки. Это неисправности препятствуют возвращению дросселя в исходное положение;
- проверьте работоспособность датчики температуры двигателя;
- повышенные обороты двигателя могут быть следствием подсоса воздуха через резиновые уплотнители форсунок, прокладку коллектора или трубки во впускной коллектор.
В любом случае поиск и устранение неисправностей рекомендуется начинать с чистки дроссельной заслонки.
Заниматься устранением неисправности самостоятельно можно при наличии опыта и соответствующего инструмента. Однако помните, что неопытными руками проще всего привести любую систему автомобиля в полностью нерабочее состояние. Регулировка ХХ – не самая сложная и дорогостоящая процедура на станции техобслуживания. Все для ремонта, диагностики и ТО ищита на http://fortunaavto.com.ua/!
Регулировка ХХ – не самая сложная и дорогостоящая процедура на станции техобслуживания. Все для ремонта, диагностики и ТО ищита на http://fortunaavto.com.ua/!
Датчик температуры охлаждающей жидкости двигателя (ECT)
ДАТЧИК ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ ЖИДКОСТИ (ECT)
Общее описание
Датчик температуры охлаждающей жидкости двигателя представляет собой терморезистор, который обычно имеет отрицательный температурный коэффициент. Это двухпроводной термистор, погруженный в охлаждающую жидкость и измеряющий ее температуру. Бортовой компьютер использует сигнал ECT в качестве основного поправочного коэффициента при расчете опережения зажигания и продолжительности впрыска.
Внешний вид
Датчик ECT показан на рис. 1.
Фиг.1
Принцип работы датчика ECT
Чтобы преобразовать изменение сопротивления ECT в изменение напряжения, которое затем обрабатывается ЭБУ, датчик ECT подключается в цепь, обычно снабжаемую опорным напряжением + 5В. При холодном двигателе и температуре окружающей среды 20 ºC сопротивление датчика составляет от 2000 Ом до 3000 Ом. После запуска двигателя температура охлаждающей жидкости начинает повышаться.ЭСТ постепенно нагревается, и его сопротивление пропорционально снижается. При 90 ºC его сопротивление находится в диапазоне от 200 Ом до 300 Ом.
При холодном двигателе и температуре окружающей среды 20 ºC сопротивление датчика составляет от 2000 Ом до 3000 Ом. После запуска двигателя температура охлаждающей жидкости начинает повышаться.ЭСТ постепенно нагревается, и его сопротивление пропорционально снижается. При 90 ºC его сопротивление находится в диапазоне от 200 Ом до 300 Ом.
Таким образом, на бортовой компьютер отправляется сигнал переменного напряжения, зависящего от температуры охлаждающей жидкости.
Типы датчиков ECT
- С отрицательным температурным коэффициентом. Это самые популярные датчики, используемые в автомобилях. Их сопротивление уменьшается с повышением температуры.
- С положительным температурным коэффициентом.Используется в некоторых старых системах, например в Renix. Здесь напряжение и сопротивление увеличиваются с повышением температуры.
Процедура проверки работоспособности датчика ECT
— Датчик с отрицательным температурным коэффициентом —
Тест с вольтметром
- Откройте защитный резиновый колпачок на разъеме датчика температуры системы охлаждения.
- Подключите отрицательный провод вольтметра к массе шасси.
- Определите, какие клеммы являются сигнальными и заземляющими.
- Подключите положительный провод вольтметра к клемме сигнала ECT.
- Запустить двигатель из холодного состояния.
- В зависимости от температуры показания напряжения должны находиться в диапазоне от 2 до 3 В. Соотношение между напряжением и температурой показано в Таблице-1.
- Проверить, соответствует ли сигнал напряжения ЕСТ температуре.Для этого вам понадобится термометр.
- Запустите двигатель и прогрейте его до рабочей температуры. Во время прогрева двигателя напряжение должно уменьшаться в соответствии со значениями, приведенными в Таблице-1.
- Распространенная проблема заключается в том, что выходное сопротивление (и напряжение) неправильно изменяется за пределы своего нормального диапазона. Нормальное значение напряжения датчика ECT составляет 2 В при холодном двигателе и 0,5 В при прогретом двигателе. Датчик неисправности может показывать напряжение 1,5 В при холодном двигателе и 1.25 В при прогретом двигателе, что вызывает затруднения при запуске холодного двигателя и наличие богатой топливной смеси при прогретом двигателе. При этом не будут генерироваться коды неисправности (если встроенный контроллер не запрограммирован на обнаружение изменений напряжения), поскольку датчик продолжает работать в пределах своих проектных параметров. При обнаружении такого дефекта необходимо заменить датчик температуры охлаждающей жидкости.
- Если сигнал напряжения ЕСТ равен 0 В (отсутствие питания или короткое замыкание на массу) или если он равен 5.0В — у нас обрыв цепи.

 Датчик неисправности может показывать напряжение 1,5 В при холодном двигателе и 1.25 В при прогретом двигателе, что вызывает затруднения при запуске холодного двигателя и наличие богатой топливной смеси при прогретом двигателе. При этом не будут генерироваться коды неисправности (если встроенный контроллер не запрограммирован на обнаружение изменений напряжения), поскольку датчик продолжает работать в пределах своих проектных параметров. При обнаружении такого дефекта необходимо заменить датчик температуры охлаждающей жидкости.
Датчик неисправности может показывать напряжение 1,5 В при холодном двигателе и 1.25 В при прогретом двигателе, что вызывает затруднения при запуске холодного двигателя и наличие богатой топливной смеси при прогретом двигателе. При этом не будут генерироваться коды неисправности (если встроенный контроллер не запрограммирован на обнаружение изменений напряжения), поскольку датчик продолжает работать в пределах своих проектных параметров. При обнаружении такого дефекта необходимо заменить датчик температуры охлаждающей жидкости.Температура, ºС | Сопротивление, Ом | Напряжение, В |
0 | 4800–6600 | 4,00 — 4,50 |
10 | 4000 | 3. |
20 | 2200–2800 | 3,00 — 3,50 |
30 | 1300 | 3,25 |
40 | 1000–1200 | 2.50–3,00 |
50 | 1000 | 2,50 |
60 | 800 | 2,00 — 2,50 |
80 | 270–380 | 1.00–1,30 |
110 | 0,50 | |
Обрыв цепи | 5,0 ± 0,1 | |
короткое замыкание на массу | 0 | |
 75 — 4,00
75 — 4,00ПРИМЕЧАНИЕ.
 Это типичный пример, но это не означает, что приведенные выше значения являются действительными и должны быть получены в процессе проверки конкретной системы .
Это типичный пример, но это не означает, что приведенные выше значения являются действительными и должны быть получены в процессе проверки конкретной системы . Возможные неисправности датчика:
— Напряжение на клемме сигнала ECT равно 0В.
- Проверить клеммы датчика на короткое замыкание на массу.
- Проверить целостность сигнальных проводов между датчиком и бортовым контроллером.
- Если все провода в порядке, но на бортовом контроллере нет выходного напряжения, необходимо проверить все соединения питания и заземления бортового контроллера. Если напряжения питания и заземления в порядке, под подозрение попадает сам бортовой контроллер.
— Напряжение на клемме сигнала ECT равно 5,0 В
Напряжение имеет такое значение при наличии разомкнутой цепи и может быть получено в одном из следующих условий:
- сигнальная клемма датчика ECT не обеспечивает подключение к датчику; Цепь датчика
- разомкнута; Цепь массы датчика
- разомкнута.

— Сигнал напряжения или опорное напряжение равно напряжению автомобильного аккумулятора.
Проверить короткое замыкание в проводе, подключенном к плюсовой клемме автомобильного аккумулятора или проводу питания.
— Датчик с отрицательным температурным коэффициентом —
Проверка с помощью омметра с датчиком ECT, отсоединенным от автомобиля
- Поместите датчик в подходящую емкость для воды и измерьте температуру воды.
- Измерьте сопротивление датчика и сравните его со значениями, приведенными в Таблице-1, показывающей взаимосвязь между сопротивлением и температурой.
- Нагрейте воду и периодически измеряйте сопротивление датчика. Сравните результаты с данными в таблице 1.
— Датчик с отрицательным температурным коэффициентом —
Измерение напряжения с помощью осциллографа
- Подключите активный конец щупа осциллографа к сигнальной клемме сенсора, а пробник заземления — к заземлению шасси.
- Установите синхронизацию развертки осциллографа в непрерывный режим измерения (регистрация медленно меняющихся сигналов).
- Поместите датчик в подходящую емкость с подогретой водой.
Через несколько минут измерения, во время нагрева воды, на экране осциллографа появится кривая изменения напряжения датчика (рис. 2). Обратите внимание на время измерения — около 10 минут. - Желательно непрерывно измерять температуру нагретой воды термометром и сравнивать ее со значениями, указанными в таблице 1.

Фиг.2
— Датчик с положительным температурным коэффициентом —
Датчик ECT с положительным температурным коэффициентом сопротивления представляет собой термистор, сопротивление которого увеличивается с повышением температуры.Используется в небольшом количестве систем (в основном в автомобилях Renault).
Общий метод проверки аналогичен методу проверки датчика с отрицательным температурным коэффициентом, описанному выше. Полученные данные измерений можно сравнить с данными, приведенными в таблице 2, показывающей зависимость между сопротивлением и температурой датчика.
Полученные данные измерений можно сравнить с данными, приведенными в таблице 2, показывающей зависимость между сопротивлением и температурой датчика.
Температура, ºС | Сопротивление, Ом | Напряжение, В |
0 | 254–266 | |
20 | 283–297 | 0.6 — 0,8 |
80 | 383–397 | 1,0 — 1,2 |
обрыв | 5,0 ± 0,1 | |
короткое замыкание на массу | 0 | |
Аналогичная версия этой статьи появилась в выпуске от 28 сентября 2000 г. по номеру EDN . по номеру EDN .ВведениеПоскольку разработчики ИС стремятся разместить больше транзисторов, работающих на более высоких скоростях, в меньших корпусах, результат может быть только один: нагрев! Добавьте к этому тот факт, что эти высокомощные ИС разрабатываются в постоянно сжимающихся коробках, и вы в конечном итоге столкнетесь с реальной проблемой управления температурным режимом. Для многих приложений это означает использование вентиляторов. К сожалению, использование вентилятора приводит к обычной головной боли вентилятора, связанной с механическими поломками, повышенным энергопотреблением и повышенным шумом. Управление скоростью вращения вентилятора и мониторинг могут облегчить некоторые из этих проблем, в результате чего будут более тихие и надежные вентиляторы, потребляющие меньше энергии.Бесщеточные вентиляторы постоянного токаПрежде чем мы перейдем к теме регулирования и мониторинга вентиляторов, нам сначала нужно понять самих вентиляторов. Бесщеточные вентиляторы постоянного тока, как правило, являются предпочтительным решением для большинства электронных шкафов. Эти вентиляторы сочетают высокую надежность с простотой использования. Базовый бесщеточный вентилятор постоянного тока представляет собой двухпроводное устройство, на которое подается постоянное напряжение. Это все, что нужно. Самый простой подход к охлаждению системы — подключить вентилятор к источнику постоянного тока и дать ему поработать. Беглый взгляд на каталоги вентиляторов показывает, что доступны вентиляторы с номинальным напряжением 5 В, 12 В, 24 В или 48 В.В настоящее время наиболее широко используются вентиляторы на 12 В. Поскольку все больше систем проектируется без источника питания 12 В, вентиляторы 5 В, вероятно, станут более распространенными. В телекоммуникационных приложениях особенно популярны вентиляторы на 48 В. Эти вентиляторы сочетают высокую надежность с простотой использования. Базовый бесщеточный вентилятор постоянного тока представляет собой двухпроводное устройство, на которое подается постоянное напряжение. Это все, что нужно. Самый простой подход к охлаждению системы — подключить вентилятор к источнику постоянного тока и дать ему поработать. Беглый взгляд на каталоги вентиляторов показывает, что доступны вентиляторы с номинальным напряжением 5 В, 12 В, 24 В или 48 В.В настоящее время наиболее широко используются вентиляторы на 12 В. Поскольку все больше систем проектируется без источника питания 12 В, вентиляторы 5 В, вероятно, станут более распространенными. В телекоммуникационных приложениях особенно популярны вентиляторы на 48 В.Бесщеточные вентиляторы постоянного тока называются «бесщеточными», потому что электродвигатель внутри вентилятора переключается с помощью электроники. В старых вентиляторах постоянного тока использовались механические щетки, которые могли вызывать повышенные электромагнитные помехи (EMI) вместе с частицами пыли из-за механического износа всей системы.Со временем вентилятор изнашивается и в конечном итоге выходит из строя. Бесщеточные вентиляторы заменили эти механические щетки электронными датчиками и переключателями, которые теперь выполняют необходимую коммутацию. Эта схема коммутации смонтирована внутри самого вентилятора и полностью прозрачна для пользователя. Конечным результатом является простое в использовании, надежное двухпроводное устройство. Это значительно увеличило срок службы и надежность этих вентиляторов. Конечному пользователю бесколлекторные вентиляторы постоянного тока довольно просто определить электрические характеристики.Поскольку постоянное напряжение, подаваемое на вентилятор, меняется, его скорость и потребляемый ток также меняются. В первом порядке скорость и ток прямо пропорциональны приложенному постоянному напряжению. См. рисунки 1 и 2 . Опции контроля вентилятораХотя бесщеточная коммутация имеет большое значение для увеличения срока службы и надежности вентиляторов, они по-прежнему являются механическими устройствами и подвержены механическому износу и выходу из строя.Со временем скорость вращения вентилятора и, следовательно, эффективность охлаждения могут постепенно ухудшаться или полностью выходить из строя. Вот почему может быть важно постоянно контролировать состояние вентилятора. Большинство производителей вентиляторов предлагают различные способы сделать это. Эти параметры делятся примерно на две категории: датчики сигнализации и датчики скорости. Датчики аварийной сигнализации обычно подают цифровой сигнал, указывающий на то, что скорость вентилятора упала ниже определенного порогового значения или что он полностью остановился. Например, компания ebm-papst Inc. предлагает вариант, который генерирует серию слабых цифровых импульсов всякий раз, когда скорость вентилятора падает до 75–85% от его номинальной скорости.NMB Technologies предлагает несколько иной вариант, который называется «Сигнал о заблокированном роторе». Этот сигнал становится высоким, когда вентилятор полностью перестает вращаться.Производители также предлагают вентиляторы с датчиками скорости, которые выдают цифровой выходной сигнал, частота которого пропорциональна скорости вращения вентилятора. Самый распространенный датчик скорости выдает два импульса на оборот. В зависимости от производителя и предлагаемых опций датчики скорости и аварийной сигнализации можно заказать с выходами с открытым коллектором или с внутренним подтягиванием.Выходы с внутренним подтягиванием могут быть TTL-совместимыми или могут изменять полное напряжение питания вентилятора. На рисунке 3 показаны выходные каскады, поставляемые компанией ebm-papst Inc.. Важно отметить, что датчики аварийной сигнализации и скорости используют то же напряжение питания, что и двигатель и его коммутационная электроника. Любые изменения напряжения питания для управления скоростью вентилятора также повлияют на коммутационную электронику и датчики скорости / аварийной сигнализации. Зачем нужна регулировка скорости?Когда вентилятор выбирается для применения, он должен быть рассчитан на наихудшие условия. Это означает выбор вентилятора, который может перемещать достаточно воздуха, чтобы поддерживать систему в достаточном охлаждении, даже при наихудшей температуре окружающей среды, рассеиваемой мощности, допусках на производительность вентилятора и старении вентилятора.Реальность ситуации такова, что в наихудших условиях система будет проводить большую часть своего времени без проблем. На этом этапе должно быть очевидно, что в большинстве условий скорость вращения вентилятора может быть уменьшена без отрицательного воздействия на систему и увеличена только тогда, когда этого требуют условия. Не так очевидно, зачем тогда заморачиваться с регулировкой скорости вращения вентилятора?Пониженный слышимый шумОдним из наиболее заметных преимуществ управления скоростью вращения вентилятора является облегчение для ваших ушей. Вентиляторы, работающие на полной скорости, могут стать серьезным источником раздражения, особенно для оборудования, используемого в тихих офисных помещениях.В большинстве офисов обычно температура значительно ниже, чем рассчитано на работу электронного оборудования, а это означает, что скорость вращения вентилятора может быть снижена без каких-либо неблагоприятных последствий, к большому облегчению для всех в пределах слышимости.Пониженное энергопотреблениеТакие приложения, как ноутбуки, выиграют от снижения энергопотребления. Рисунок 4 показывает типичное энергопотребление в зависимости от скорости вращения вентилятора для трех разных вентиляторов. Потребляемая мощность может быть приблизительно выражена квадратом скорости вентилятора.В случае вентилятора Nidec на Рисунке 4 снижение скорости вращения вентилятора до 69% от номинала при напряжении 12 В снижает потребление энергии вдвое. Увеличенный срок службыСнижение скорости вентилятора также снижает износ вентилятора. Износ вентилятора грубо зависит от абсолютного числа оборотов вентилятора. Уменьшение износа приводит к увеличению срока службы и, следовательно, увеличению среднего наработки на отказ (MTBF). Поскольку вентиляторы являются механическими, они, как правило, являются одним из наиболее частых отказов в системе.Все, что можно сделать для улучшения MTBF вентилятора, также приведет к значительному увеличению MTBF в конечном оборудовании. Это может быть особенно важно в таких системах, как серверы и сетевое оборудование.Снижение засоренияЛюбой, кто разбирал старое оборудование, знает, что электроника притягивает пыль, особенно в системах с вентиляторами. Поскольку пыль скапливается на входе и выходе систем с вентиляторами, поток воздуха может уменьшиться или полностью прекратиться. Это, конечно, может привести к снижению охлаждения и повышению температуры.Снижение скорости вращения вентилятора может уменьшить скорость, с которой системы собирают эту пыль, тем самым продлевая срок службы системы.Методы контроля скоростиТеперь, когда мы лучше понимаем бесщеточные вентиляторы постоянного тока, их доступные варианты и преимущества управления скоростью, мы рассмотрим три метода управления скоростью. Каждый метод предлагает компромисс между стоимостью и производительностью.Прямой ШИМШиротно-импульсная модуляция (ШИМ) вентилятора напрямую включает включение и выключение источника питания вентилятора с фиксированной частотой.Регулировка рабочего цикла выполняется для управления скоростью вентилятора. Чем больше рабочий цикл, тем быстрее вращается вентилятор. Выбор подходящей частоты для этого метода может быть довольно сложным. Если частота сигнала ШИМ слишком низкая, скорость вентилятора будет заметно колебаться в пределах цикла ШИМ. Чтобы проиллюстрировать этот момент, возьмем нелепую крайность — 50% -ный рабочий цикл, сигнал возбуждения 0,01 Гц. В течение первых 50 секунд вентилятор будет вращаться на полной скорости, а затем остановится в течение следующих 50 секунд.Частота также может быть слишком высокой, поскольку коммутация осуществляется электронным способом с использованием цепей, которые питаются от плюсовой и минусовой клемм вентилятора. Использование ШИМ с вентилятором и, следовательно, слишком быстрой внутренней коммутационной электроники может привести к тому, что внутренняя коммутирующая электроника перестанет правильно работать. Помните, что эта электроника не предназначена для работы ни от чего, кроме источников постоянного тока. Таким образом, полезные частоты находятся в диапазоне от 20 Гц до 160 Гц. Кроме того, время нарастания и спада ШИМ должно быть достаточно медленным, чтобы обеспечить долгосрочную надежность вентилятора.Как и все, прямое применение ШИМ имеет свои преимущества и недостатки. К преимуществам относятся очень простая схема управления (см. , рисунки 8a, и , 8b, ), хорошие пусковые характеристики и минимальное тепловыделение в проходном транзисторе. К недостаткам можно отнести повышенную нагрузку на вентилятор и невозможность использования датчиков скорости или сигнализации. Обратите внимание, что датчики скорости и аварийные сигналы питаются от того же напряжения питания, что и двигатель. Поскольку напряжение питания включается и выключается с частотой от 20 Гц до 160 Гц, схемы скорости и сигнализации также включаются и отключаются, что фактически делает бесполезными датчики скорости и сигнализации. При ШИМ-регулировании напряжение, подаваемое на вентилятор, равно номинальному (12 В для вентилятора 12 В) или 0 В. Однако, поскольку вентилятор вращается с меньшей скоростью, чем его номинальная скорость (помните, что это вся идея), его обратная ЭДС уменьшается. Это вызывает ток, превышающий номинальный, через обмотки во время включенного периода цикла ШИМ. Хотя вентиляторы предназначены для работы с повышенными токами, например, при запуске, повышенные токи с частотой 30 раз в секунду в течение всего срока службы вентилятора могут повлечь за собой проблемы с надежностью.Но даже с этими недостатками ШИМ-управление может быть подходящим решением в недорогих некритичных приложениях. Линейный регламентКак следует из этого термина, «линейное регулирование» регулирует напряжение постоянного тока на вентиляторе с помощью линейного регулятора. При использовании этого метода важно убедиться, что вентилятор рассчитан на работу в широком диапазоне напряжений. Одним из основных преимуществ линейного регулирования перед ШИМ является то, что оно позволяет использовать датчики скорости и аварийные сигналы. К сожалению, линейное регулирование также имеет свои недостатки: в основном рассеяние мощности в проходном элементе, а также проблемы запуска и остановки.Линейные регуляторы управляют напряжением постоянного тока на вентиляторе. Они делают это за счет рассеивания энергии в виде тепла. Наверное, глупо генерировать тепло, чтобы что-то охладить. Но это не так смешно, как вы думаете. Во время максимального и минимального охлаждения рассеиваемая мощность в идеале должна быть равна нулю. Во время максимального охлаждения проходной элемент полностью включен, поэтому напряжение на нем почти равно нулю. Нулевое напряжение означает нулевое рассеивание мощности. Во время минимального охлаждения проходной элемент выключен (течет нулевой ток), поэтому рассеиваемая мощность снова равна нулю.Как обсуждалось ранее, ток, потребляемый вентилятором, может быть аппроксимирован линейной функцией приложенного напряжения, что делает его резистивным. Имея это в виду, рассеивание мощности в худшем случае происходит примерно тогда, когда напряжение на вентиляторе составляет половину его максимального рабочего напряжения. См. Рисунок 5 . Это означает, что рассеивание мощности в наихудшем случае в проходном элементе можно оценить по следующему уравнению: P = 1/4 (V MAX × I MAX ), где I MAX и V MAX — номинальные напряжения. и токи вентилятора соответственно.Например, вентилятор мощностью 1,2 Вт (12 В при 98 мА) в худшем случае будет иметь рассеиваемую мощность на проходном элементе всего 300 мВт при работе при 6 В с источником питания 12 В. Приятно отметить, что максимальное рассеивание тепла в контуре вентилятора происходит при минимальных требованиях к охлаждению. Кроме того, даже несмотря на то, что используется устройство для рассеивания мощности, при снижении скорости вентилятора все равно сохраняется общая экономия энергии. См. Рисунок 6 . Проблемы запуска и остановки связаны. Для запуска вентилятора требуется определенное напряжение. Это называется «пусковым напряжением». Когда вентилятор уже вращается, снижение напряжения ниже напряжения остановки приведет к остановке вентилятора. Пусковое напряжение равно или (обычно) больше, чем напряжение останова. Обычно они составляют от 25% до 50% номинального напряжения вентилятора. Когда линейное регулирование используется без контроля скорости, невозможно узнать, остановился ли вентилятор или даже запустился. Есть несколько решений этой проблемы. Один из них — предотвратить падение напряжения на вентиляторе ниже пускового. Хотя это легко сделать программно, выбор правильного напряжения для обеспечения правильного запуска всех вентиляторов и учет старения могут ограничить полезный диапазон регулирования скорости. Возможно, вам придется выбрать минимальное напряжение в худшем случае 60% от номинального, чтобы гарантировать запуск всех вентиляторов. Это может быть расточительным, учитывая, что средний вентилятор можно легко снизить до 40%.Другое решение — использовать вентилятор с тахометром. Теперь за тахометром можно следить с помощью микроконтроллера, позволяя программному обеспечению знать, когда вентилятор не запустился или остановился. Хотя этот метод значительно более надежен и менее затратен, он требует времени на разработку и дополнительных аппаратных / программных ресурсов. Постановление DC-DCРегулирование DC-DC аналогично линейному регулированию в том, что оно управляет скоростью вентилятора, регулируя напряжение постоянного тока на нем. Однако, в отличие от линейного регулятора, регулятор DC-DC использует импульсный источник питания.Поскольку оба метода регулируют скорость, регулируя напряжение постоянного тока, оба имеют одинаковые преимущества и недостатки. Единственное исключение, однако, состоит в том, что регуляторы DC-DC в идеале эффективны на 100% и не выделяют тепла (реальный КПД обычно составляет от 75% до 95%). Наказанием за эту эффективность являются повышенная стоимость и сложность (см. рисунки 8e и 8f ). Несмотря на то, что регуляторы DC-DC, как правило, более эффективны, при полной скорости вращения вентилятора не будет реальной экономии энергии (см. Рисунок 7 ).Реальная выгода от использования регуляторов DC-DC достигается только тогда, когда скорость вращения вентилятора снижается с максимальной. Максимальный КПД достигается, когда напряжение на вентиляторе составляет половину максимально доступного напряжения. Это происходит по той же причине, по которой линейные регуляторы рассеивают максимум на той же половине напряжения питания. Из-за повышенной стоимости и сложности преобразователей постоянного тока в постоянный и ограниченной экономии энергии регуляторы постоянного тока в постоянный обычно предназначены для систем с батарейным питанием или систем, в которых используются мощные вентиляторы или большое количество вентиляторов.Как всегда, со всеми DC-DC преобразователями необходимо соблюдать осторожность при компоновке. Верхняя сторона в сравнении с нижним приводомВсе три вышеуказанных метода могут быть разработаны с использованием управляющего транзистора со стороны высокого или низкого уровня (см. Рисунок 8). Привод высокого уровня требует немного более сложной схемы из-за преобразования уровней, но он имеет то преимущество, что отрицательная клемма вентилятора остается на земле. Таким образом, датчики скорости и аварийные сигналы теперь привязаны к земле, и с ними стало проще подключаться.В отличие от этого, привод нижнего уровня не требует преобразователя уровня для управляющего транзистора, но потребуется некоторый тип преобразования для датчиков скорости и аварийных сигналов. При использовании управляющего транзистора со стороны низкого уровня положительный вывод вентилятора поддерживается на постоянном уровне 12 В (при условии, что вентилятор 12 В), в то время как отрицательный вывод вентилятора регулируется вверх и вниз для регулирования скорости. К сожалению, датчики скорости и аварийные сигналы имеют общий отрицательный вывод вентилятора и регулируются вместе со скоростью вращения вентилятора, что приводит к необходимости преобразования уровня. Информация о приложенияхКонтроль скорости без тахометраНа рисунках 9 и 10 приведены два примера схем вентилятора, разработанных для систем, в которых не требуется сигнализация или датчик скорости. На рисунке 9 MAX1669 настроен для работы вентилятора в режиме ШИМ. На рисунке 10 показан MAX1669, сконфигурированный для линейного режима постоянного тока.MAX1669 является одновременно датчиком температуры и контроллером вентилятора. Эти два блока работают независимо друг от друга и предназначены для использования с микроконтроллером. Связь между MAX1669 и микроконтроллером осуществляется через интерфейс, совместимый с SMBus. Интерфейс SMB — это 2-проводный последовательный интерфейс, который очень похож на интерфейс I²C и обычно обратно совместим с ним. MAX1669 сообщает внешнюю температуру с помощью удаленного диода.На рисунках 9 и 10 показан MAX1669, использующий 2N3906, подключенный в качестве этого диода. Подобный диод иногда входит в состав кристалла некоторых ИС. Примером может служить семейство деталей Virtex®. Эти устройства имеют два контакта с маркировкой DXN и DXP. Подключение MAX1669 напрямую к этим контактам позволяет напрямую измерять температуру кристалла. Это позволяет схеме вентилятора более точно контролировать температуру кристалла конкретной ИС. Это также избавляет от беспокойства по поводу установки датчиков температуры на корпусах ИС, тепловых постоянных времени и необходимости проведения расчетов теплового сопротивления. Эта схема (и другие обсуждаемые) либо работает как разомкнутый, либо в замкнутом контуре в зависимости от температуры. При работе в разомкнутом контуре датчик температуры измеряет температуру окружающей среды, устанавливая датчик на входе в агрегат. По мере повышения температуры окружающей среды скорость вращения вентилятора увеличивается под управлением программного обеспечения. В этой конфигурации увеличение или уменьшение скорости вентилятора в идеале не повлияет на измеряемую температуру. Таким образом, система не имеет тепловой обратной связи и является разомкнутым контуром.Поскольку это разомкнутый цикл, нет проблем со стабильностью, что упрощает разработку программного обеспечения. Однако нет прямого способа узнать фактическую температуру компонентов, которые необходимо охладить. Если эффективность охлаждения снижается из-за частичного засорения впускных отверстий или старения вентилятора, например, этот тип управления не имеет возможности узнать и, следовательно, компенсировать это. Это означает, что система должна быть спроектирована таким образом, чтобы вентиляторы вращались быстрее, чем требуется, что привело бы к неоптимальной системе. Размещение датчика температуры в месте, охлаждаемом вентилятором, образует замкнутую систему. Увеличение скорости вращения вентилятора приводит к падению измеряемой температуры. Теперь это требует внимания к вопросам стабильности. Такое внимание приводит к увеличению времени разработки и усложнению программного обеспечения, но вознаграждает вас прямым и более жестким контролем над источником тепла. Теперь скорость вентилятора можно регулировать на минимальной скорости, необходимой для поддержания критических компонентов ниже заданной температуры.Кроме того, будет автоматическая компенсация таких проблем, как частичное засорение входов и выходов. В обоих случаях конструкция оборудования одинакова. Единственное отличие — это размещение датчика температуры и программного кода. Контроль скорости с помощью тахометраВышеупомянутые схемы хорошо работают в системах начального уровня, где нас не слишком заботит надежность. Однако в системах, в которых мы уделяем особое внимание надежности, эти схемы могут не работать. В случае регулирования температуры без обратной связи система не имеет возможности обнаружить какой-либо тип отказа вентилятора.Повышенные температуры при регулировании с обратной связью можно использовать в качестве индикатора, но все же есть возможности для улучшения. Повышенные температуры указывают на проблему в системе, но не позволяют отличить забитые впускные и выпускные отверстия, высокие температуры окружающей среды, чрезмерное внутреннее рассеивание тепла или отказы вентиляторов. Кроме того, поскольку тепло является основным признаком проблем, может пройти некоторое время, прежде чем эти проблемы будут обнаружены из-за медленного теплового отклика. Например, карандаш внезапно застревает в веере.Может пройти несколько минут, прежде чем температура поднимется настолько, что проблема будет отмечена.Выходы тахометра (датчики скорости) могут решить эти проблемы. На рисунке 11 показана схема, в которой используется вентилятор с тахометром. MAX6625 измеряет температуру и сообщает ее микроконтроллеру через 2-проводной интерфейс, совместимый с I²C. Тот же 2-проводный интерфейс передает команды на MAX6650, который управляет скоростью вентилятора. MAX6650 имеет все необходимое преобразование уровней и оборудование для взаимодействия с тахометром с открытым коллектором вентилятора.Скорость вращения вентилятора может быть считана через интерфейс, совместимый с SMBus, как целое число байта. MAX6650 может работать как регулятор скорости вентилятора или регулятор скорости вентилятора. Разница небольшая, но важная. Контроллер скорости вентилятора управляет напряжением на вентиляторе и, следовательно, косвенно регулирует его скорость.Регулятор скорости вентилятора фактически измеряет и регулирует скорость вентилятора с помощью своего тахометра. Когда MAX6650 используется в качестве контроллера скорости вращения вентилятора, микроконтроллер считывает температуру с MAX6625 и скорость вращения вентилятора с MAX6650 через интерфейс, совместимый с SMBus. Затем микроконтроллер выдает коды ЦАП на MAX6650. Эти коды DAC напрямую управляют напряжением на вентиляторе и, таким образом, косвенно управляют его скоростью. Затем микроконтроллер должен постоянно считывать скорость вращения вентилятора через MAX6650 и вносить изменения в ЦАП, чтобы поддерживать скорость вращения вентилятора в стабильном состоянии.Это становится особенно важным при пуске и остановке вентилятора. Когда MAX6650 настроен как регулятор скорости вентилятора, микроконтроллер выдает команды скорости. MAX6650 автоматически контролирует и регулирует скорость вентилятора, чтобы поддерживать ее в пределах нормы. После того, как желаемая скорость записана, дальнейшее участие микроконтроллера не требуется. Это значительно снижает накладные расходы на программное обеспечение. Если MAX6650 не может поддерживать желаемую скорость, он может генерировать аварийный сигнал в виде прерывания микроконтроллера. Подобно схемам на рисунках 9 и 10, схемы на рисунках 11 и , рисунок 12, можно заставить работать в температурных системах с разомкнутым или замкнутым контуром. Важно отметить, что в системе с замкнутым контуром температуры теперь есть два замкнутых контура: один для регулирования температуры, а другой — для регулирования скорости вращения вентилятора. Необходимо принять дополнительные меры для предотвращения проблем со стабильностью. Поскольку управление вентилятором обычно зависит от микроконтроллера, оно также зависит от программного обеспечения.Программное обеспечение может отображать множество типов проблем, включая бесконечное множество циклов. В системах на базе ПК вирусы могут даже намеренно вызывать проблемы. Такие проблемы могут потребовать резервного копирования для предотвращения повреждений. На рисунке 12 показана такая резервная копия. MAX6501 — небольшой недорогой датчик температуры с цифровым выходом.Когда температура поднимается выше определенного порога, его выход становится низким. MAX6650 может быть настроен на мониторинг своего универсального входа / выхода (GPIO1), так что, когда он будет понижен, устройство автоматически включит вентилятор на полную скорость. Это произойдет независимо от команд, выдаваемых через программное обеспечение. Стратегически размещая MAX6501 в критических областях, можно избежать проблем. Интересно отметить, что этот тип резервной защиты защищает не только от программных проблем, но и от менее вероятного отказа первичного датчика температуры и отказа оборудования микроконтроллера.Поскольку MAX6501 имеет выход с открытым коллектором, несколько устройств можно связать вместе и установить в нескольких местах внутри устройства. Это позволяет одновременно защитить несколько критических мест. Несколько вентиляторов, управляемых как группаРисунок 13 — это вариант рисунка 11. Иногда желательно управлять несколькими вентиляторами как одной группой. На рисунке 13 показано, как MAX6651 управляет тремя вентиляторами как одним устройством. MAX6651 похож на MAX6650, но имеет дополнительные GPIO и входы для мониторинга тахометра.Поскольку все три вентилятора работают параллельно, независимое регулирование скорости каждого вентилятора невозможно. Один вентилятор должен быть выбран в качестве ведущего, вокруг которого замыкается любой контур регулирования скорости. В режиме регулирования MAX6651 замыкает контур скорости вокруг вентилятора, подключенного к TACH0. Когда MAX6651 используется в качестве контроллера скорости вращения вентилятора, микроконтроллер может замкнуть контур вокруг любого из вентиляторов. Хотя MAX6651 напрямую не регулирует скорость остальных вентиляторов, они будут работать с одинаковой скоростью, если используются идентичные вентиляторы.Чтобы гарантировать правильную работу нерегулируемых вентиляторов, MAX6651 позволяет микроконтроллеру считывать скорость каждого вентилятора через интерфейс, совместимый с SMBus. Таким образом, если какой-либо из вентиляторов выходит за допустимые пределы, пользователя можно пометить. MAX6651 может напрямую подключаться к четырем вентиляторам. На рисунке 14 показано, как использовать аналоговый мультиплексор для контроля более четырех вентиляторов. GPIO2, GPIO3 и GPIO4 настроены как выходы.Эти биты можно переключать через интерфейс, совместимый с SMBus, для управления тахометром вентилятора, подключенным к входу TACh4. Приложение N + 1 и горячей заменыКогда проблема возникает с вентилятором, необходимо предпринять соответствующие действия. Иногда все, что требуется — это выключить систему, чтобы предотвратить повреждение. Однако для систем, которым необходимо минимизировать время простоя, это не очень привлекательный вариант. Рисунок 15 показывает приложение, позволяющее системам продолжать работать даже при отказе вентилятора. В этой схеме используется метод, обычно называемый N + 1. N + 1 — это практика использования на один вентилятор больше, чем фактически необходимо в худших условиях. Это позволяет обеспечить достаточное охлаждение в случае выхода из строя одного из вентиляторов. Кроме того, все вентиляторы должны быть размещены на отдельных картах и спроектированы таким образом, чтобы их можно было заменять в горячем режиме. Это позволяет снимать и заменять неисправный вентилятор во время работы устройства, предотвращая простои. В большинстве случаев работает больше вентиляторов, чем требуется, поэтому снижение скорости вращения вентиляторов становится еще более актуальным. Однако в случае отказа вентилятора оставшиеся вентиляторы должны вращаться на максимальной скорости. Кроме того, пользователя необходимо уведомить об удалении и замене неисправного вентилятора. На рисунке 15 MAX6651 настроены через интерфейс, совместимый с SMBus, для создания логического низкого уровня на GPIO0, когда они не могут поддерживать запрошенную скорость вращения вентилятора. Эти выходы (открытый сток с внутренними подтяжками) связаны вместе. Таким образом, любой из трех вентиляторов, который не может поддерживать желаемую скорость (из-за неисправности), приведет к понижению уровня этой линии. Затем эта же линия подключается ко всем контактам GPIO1. Эти контакты настроены как входы, которые будут включать соответствующие вентиляторы на полную скорость при подаче низкого логического уровня.Таким образом, отказ вентилятора автоматически приводит к тому, что все вентиляторы вращаются на полной скорости. Еще одно преимущество заключается в том, что микроконтроллер не требует участия. Может быть желательно, чтобы микроконтроллер прерывался при возникновении проблемы. Это легко сделать, подключив GPIO0 к выводу прерывания, как показано. Таким образом, микроконтроллер теперь может определить, какой вентилятор вышел из строя, считывая его скорость через интерфейс, совместимый с SMBus. Обладая этими знаниями, он может пометить пользователя, что нужно заменить соответствующий вентилятор.GPIO2 MAX6651 можно прочитать через интерфейс, совместимый с SMBus (или через входной вывод на микроконтроллере, если он доступен), чтобы определить, когда вентилятор удален или подключен. Синхронизация вентиляторовСистемы, в которых используется несколько вентиляторов, могут испытывать дополнительный источник шумового раздражения из-за частот биений между вентиляторами. Подобно эффекту, наблюдаемому в самолетах с несколькими двигателями, два вентилятора, которые вращаются с немного разными скоростями, будут вызывать шум биений. Частота шума связана с разницей в скорости.Этот эффект может быть незаметным и обычно не беспокоит большинство юнитов. Однако с системами более высокого уровня мы, возможно, захотим избавиться от как можно большего раздражающего шума. Очевидное решение — вращать вентиляторы с одинаковой скоростью. Рисунок 16 показывает приложение, выполняющее именно это. Основная проблема, связанная с попыткой заставить независимые вентиляторы вращаться с одинаковой скоростью, заключается в том, что каждый MAX6651 имеет свою собственную временную развертку (частоту генератора). Эти временные рамки достаточно точны для индивидуального контроля скорости вращения вентиляторов, но не достаточно точны, чтобы предотвратить биение в системах с несколькими вентиляторами. Этот источник ошибок устраняется путем настройки всех MAX6651 на использование одного и того же генератора. Чтобы облегчить это, MAX6651 может настроить свой вывод GPIO2 для работы в качестве входа или выхода генератора.Если настроить первый MAX6651 как тактовый выход, а остальные как тактовые входы, все они будут работать на одной и той же частоте. Теперь, когда все детали работают с одинаковыми тактовыми частотами, достижимы жесткие допуски по скорости. ЗаключениеРегулировка скорости вращения вентилятора полезна для повышения надежности, снижения энергопотребления и снижения шума систем. Можно выбрать множество различных схем и опций с точки зрения компромисса между ценой и производительностью. В этой статье представлены некоторые сведения и возможные решения различных проблем, связанных с реализацией такого контроля. | |
Что такое разные датчики двигателя и как они работают?
Что такое датчики двигателя?
Система управления двигателем современного автомобиля состоит из широкого спектра электронных и электрических компонентов, включая датчики двигателя, реле и исполнительные механизмы, которые работают вместе. Они предоставляют блоку управления двигателем автомобиля важные параметры данных, необходимые для эффективного управления различными функциями двигателя. Вообще говоря, датчики двигателя — это электромеханические устройства, которые контролируют различные параметры двигателя.В двигателе используются различные типы датчиков, в том числе термопары, резистивные датчики температуры (RTD) и датчики на эффекте Холла.
Различные датчики двигателяТипы датчиков:
Кроме того, термопарный датчик — это прибор для измерения температуры. Он преобразует температуру в электрический заряд. Термопары используют два разных проводника, которые контактируют друг с другом в одном или нескольких местах. Таким образом, он производит напряжение. Он, в свою очередь, отправляет сигнал в виде электрического тока в ЭБУ.Термопары обычно используются в качестве датчиков температуры. Он измеряет и контролирует температуру, например, в случае температуры охлаждающей жидкости двигателя.
Кроме того, термометры сопротивления или резистивные датчики температуры также измеряют температуру. Однако они делают это, соотнося сопротивление элемента RTD с температурой. Элемент RTD изготовлен из чистых металлов, таких как платина, никель или медь. В блоке испарителя кондиционера используется датчик зонда этого типа.
Датчик температуры переменного токаКроме того, датчик на эффекте Холла содержит преобразователь, который изменяет свое выходное напряжение в соответствии с магнитным полем.Обычно датчики на эффекте Холла определяют скорость или скорость. Этот тип датчика используется в приложениях для определения местоположения в автомобилях. Таким образом, они используются для определения скорости вращения коленчатого вала или его положения.
Кроме того, датчики двигателя предоставляют системе управления двигателем важные параметры данных в режиме реального времени. Эти датчики двигателя постоянно контролируют параметры двигателя. Они также сообщают ЭБУ изменения, которые время от времени происходят в данных. На основе этих входных данных ЭБУ повторно рассчитывает правильное соотношение воздух-топливо и угол опережения зажигания.Он также рассчитывает и подает правильное количество топлива в двигатель при различных условиях нагрузки.
В современном автомобиле есть следующие датчики:
| SL. | Название датчика | Назначение |
| 01 | Измеритель соотношения воздух-топливо | Контролирует правильное соотношение воздух-топливо для двигателя |
| 02 | Датчик оборотов двигателя | Контролирует частоту вращения двигателя |
| 03 | Датчик положения дроссельной заслонки | Контролирует положение дроссельной заслонки в двигателе |
| 04 | Датчик положения коленчатого вала | Контролирует положение поршня в ВМТ двигателя |
| 05 | Датчик положения кулачка | Контролирует положение клапанов в двигателе |
| 06 | Датчик детонации | Обнаруживает детонацию двигателя из-за опережения времени |
| 07 | Датчик температуры охлаждающей жидкости двигателя | Измеряет температуру двигателя |
| 08 | Датчик абсолютного давления в коллекторе или MAP | Используется для регулирования расхода топлива |
| 09 | Датчик массового расхода воздуха или массового расхода воздуха | Сообщает о массе воздуха, поступающего в двигатель, в ЭБУ |
| 10 | Кислород / O2 / Лямбда-зонд | Контролирует количество кислорода в выхлопе |
| 11 | Датчик давления топлива | Меры давления в топливной системе |
| 12 | Датчик скорости автомобиля (VSS) | Измеряет скорость автомобиля |
Кроме того, после расчета количества топлива ЭБУ отправляет сигналы различным реле и исполнительным механизмам.К ним относятся цепь зажигания, свечи зажигания, топливные форсунки, клапан управления воздухом холостого хода и клапан рециркуляции выхлопных газов (EGR). Таким образом, достигается наилучшая производительность двигателя при минимальном уровне выбросов.
Поскольку все датчики двигателя подключаются к ЭБУ, он, в свою очередь, также может отслеживать их неисправность. ЭБУ собирает сигналы с неисправных датчиков двигателя и сохраняет их в своей памяти. Вы можете диагностировать эти неисправности двумя способами. Во-первых, считывая память ЭБУ с помощью «кодов неисправностей».Или с помощью сложного диагностического оборудования двигателя, поставляемого производителями автомобилей.
Для получения дополнительной информации нажмите здесь.
Продолжайте читать: Как работает иммобилайзер двигателя? >>
О компании CarBikeTech
CarBikeTech — это технический блог. Его члены имеют опыт работы в автомобильной сфере более 20 лет. CarBikeTech регулярно публикует специальные технические статьи по автомобильным технологиям.
Посмотреть все сообщения CarBikeTech
Устройство обнаружения неисправности датчика температуры воды для системы регулирования холостого хода
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка связана с заявкой на патент Японии №Привет. 8-11883.
Уровень техники
1. Область изобретения
Данное изобретение относится к устройству управления для двигателя внутреннего сгорания, которое может подавлять ненормальное повышение частоты вращения холостого хода двигателя внутреннего сгорания во время отказа воды. Датчик температуры.
2. Описание предшествующего уровня техники
Управление частотой вращения холостого хода двигателя согласно предшествующему уровню техники установило целевую частоту вращения холостого хода выше, чем обычно, и увеличило количество всасываемого воздуха, чтобы преодолеть высокую степень трения, когда двигатель холодный. по сравнению с состоянием после прогрева двигателя или для быстрого прогрева двигателя.Следовательно, если датчик температуры воды для определения температуры охлаждающей воды двигателя выйдет из строя, и количество воздуха, которое должно подаваться, когда двигатель находится при низкой температуре, подается в двигатель после прогрева, частота вращения холостого хода может ненормально возрасти.
Для предотвращения этого клапан регулирования холостого хода (далее сокращенно ISCV) поворотного соленоидного типа может быть снабжен защитным механизмом биметаллического типа. Этот защитный механизм биметаллического типа ограничивает количество всасываемого воздуха в соответствии с температурой охлаждающей воды за счет смещения биметаллического элемента в соответствии с температурой охлаждающей воды и ограничения диапазона степени открытия ISCV для обеспечения возможности запуска при низкой температуре и работоспособности после двигателя. прогрев, предотвращая при этом ненормальное повышение оборотов холостого хода при выходе из строя датчика температуры воды.
Однако защитный механизм биметаллического типа увеличивает количество деталей ISCV и снижает легкость сборки ISCV и становится фактором, вызывающим рост производственных затрат. По этой причине желательно исключить защитный механизм биметаллического типа, но когда устраняется защитный механизм биметаллического типа, частота вращения холостого хода возрастает ненормально после отказа датчика температуры воды и возможность запуска при низких температурах, а также работоспособность после двигателя. разминка ухудшается.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В свете вышеупомянутых проблем предшествующего уровня техники целью настоящего изобретения является создание устройства управления для двигателя внутреннего сгорания, которое может быть предоставлено по низкой цене с новым устройством на месте. защитного механизма биметаллического типа в качестве меры противодействия при выходе из строя датчика температуры воды.
Для достижения вышеупомянутой цели устройство управления двигателем внутреннего сгорания согласно первому аспекту настоящего изобретения имеет устройство обнаружения отказов для обнаружения отказа датчика температуры воды, а во время отказа датчика температуры воды управляющее Устройство управляет клапаном управления впускным воздухом на холостом ходу, чтобы поток впускаемого воздуха на холостом ходу стал нейтральным.Здесь «нейтральный поток» — это промежуточный поток между верхним и нижним пределами воздушного потока, регулируемый с помощью клапана управления впускным воздухом холостого хода; Обеспечиваются возможность запуска при низкой температуре и работоспособность после прогрева двигателя, предотвращая при этом ненормальное повышение оборотов холостого хода при выходе из строя датчика температуры воды, поскольку при выходе из строя датчика температуры воды поток воздуха на впуске на холостом ходу становится нейтральным. При такой конструкции можно отказаться от защитного механизма биметаллического типа в соответствии с предшествующим уровнем техники, и наряду с этим можно с небольшими затратами реализовать меры противодействия на время отказа датчика температуры воды с помощью программного обеспечения.
Существует два метода управления потоком всасываемого воздуха на холостом ходу: метод обходного воздуха для управления с помощью клапана, при котором воздушный поток, проходящий через обходной канал всасываемого воздуха (далее именуемый «обходной воздушный поток»), обходит дроссельную заслонку, и дроссельная заслонка. метод прямого действия для управления полностью закрытым положением дроссельной заслонки с помощью привода, тем самым управляя потоком воздуха, проходящим через дроссельную заслонку. Кроме того, в способе байпасного воздуха может использоваться либо соленоидный клапан, либо клапан с приводом от шагового двигателя в качестве клапана (клапана управления впускным воздухом холостого хода) для управления потоком байпасного воздуха.
В случае, когда это изобретение применяется к устройству способа перепускного воздуха, использующему соленоидный клапан, достаточно управлять соленоидным клапаном, чтобы он открывался, по существу, наполовину, когда неисправность датчика температуры воды была обнаружена устройством обнаружения неисправности. . Другими словами, байпасный воздушный поток (поток всасываемого воздуха на холостом ходу) становится нейтральным, и ненормальное повышение скорости холостого хода во время отказа датчика температуры воды предотвращается посредством открытия соленоидного клапана, по существу, наполовину во время отказа датчика температуры воды.В этом случае соленоидный клапан может быть открыт по существу наполовину, когда рабочий режим соленоидного клапана во время отказа датчика температуры воды регулируется, по существу, на уровне 50%.
В случае, когда это изобретение применяется к устройству способа перепускного воздуха, использующему клапан типа привода шагового двигателя, достаточно управлять клапаном типа привода шагового двигателя, чтобы он открывался, по существу, наполовину при сбое температуры воды. датчик был обнаружен устройством обнаружения неисправности.В этом случае достаточно управлять клапаном, чтобы он открывался, по существу, наполовину, установив количество шагов привода шагового двигателя, равное количеству шагов, которое по существу составляет половину максимального количества шагов во время отказа датчика температуры воды.
В случае, когда это изобретение применяется к устройству прямого действия с дроссельной заслонкой, достаточно управлять степенью открытия дроссельной заслонки на холостом ходу при степени открытия, которая по существу является промежуточной между верхним и нижним пределами. холостого хода степени открытия в нормальное время, когда неисправность датчика температуры воды была обнаружена устройством обнаружения неисправности.В этом случае достаточно контролировать степень открытия дроссельной заслонки на холостом ходу при промежуточной степени открытия при низкой температуре и степень открытия холостого хода после прогрева при выходе из строя датчика температуры воды. Кроме того, температура охлаждающей воды, когда неисправность датчика температуры воды была обнаружена устройством обнаружения неисправности, может рассматриваться как температура после прогрева двигателя, и может выполняться управление впрыском топлива и управление опережением зажигания.
Другие объекты и особенности изобретения будут раскрыты в ходе его описания, которое следует ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные цели и преимущества настоящего изобретения будут более очевидны из следующего подробного описания его предпочтительных вариантов осуществления вместе с прилагаемыми чертежами, на которых:
Фиг. 1 показывает систему управления двигателем согласно первому предпочтительному варианту осуществления настоящего изобретения;
РИС. 2 — блок-схема, показывающая обработку базовой процедуры согласно первому варианту осуществления;
РИС.3 — блок-схема, показывающая обработку процедуры диагностики отказа датчика температуры воды в первом варианте осуществления;
РИС. 4 — график, показывающий взаимосвязь между температурой охлаждающей воды и рабочим значением DOP ISCV во время холостого хода;
РИС. 5 — вид в разрезе клапана ISC типа привода шагового двигателя, используемого во втором предпочтительном варианте осуществления настоящего изобретения;
РИС. 6 — график, показывающий зависимость между температурой охлаждающей воды и количеством шагов привода шагового двигателя во время холостого хода во втором варианте осуществления;
РИС.7 показывает систему ISC дроссельного клапана прямого действия, используемую в третьем предпочтительном варианте осуществления настоящего изобретения; и
ФИГ. 8 — график, показывающий взаимосвязь между температурой охлаждающей воды и степенью открытия дроссельной заслонки во время холостого хода в третьем варианте осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ НАСТОЯЩИХ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Первый предпочтительный вариант осуществления настоящего изобретения будет описан ниже со ссылкой на фиг.1-4. Сначала будет описана общая структура системы управления двигателем со ссылкой на фиг. 1. Воздухоочиститель 13 расположен в самой верхней части воздухозаборной трубы 12 двигателя 11, который является двигателем внутреннего сгорания. Датчик 14 температуры всасываемого воздуха для определения температуры Tha всасываемого воздуха предусмотрен на стороне выхода воздухоочистителя 13, а дроссельная заслонка 15 и датчик 16 отверстия дроссельной заслонки предусмотрены на стороне выхода датчика 14 температуры всасываемого воздуха.Обводной канал 40 всасываемого воздуха, который обходит дроссельную заслонку 15, предусмотрен в воздухозаборном трубопроводе 12, а поворотный соленоидный клапан 41 расположен в перепускном канале 40 всасываемого воздуха в качестве клапана управления впускным воздухом холостого хода.
Между тем, датчик 17 давления в воздухозаборном трубопроводе для определения давления PM в воздухозаборном трубопроводе предусмотрен на стороне выхода дроссельной заслонки 15, а расширительный бак 18 расположен на стороне выхода датчика 17 давления в воздухозаборном трубопроводе. Впускной коллектор 19, который подает воздух к цилиндрам двигателя 11, соединен с расширительным баком 18, и клапаны 20 впрыска топлива для распыления топлива соответственно установлены на участке разветвления для цилиндров впускного коллектора 19.Свеча зажигания 21 установлена в каждом из цилиндров двигателя 11, и ток высокого напряжения, генерируемый цепью зажигания 22, подается на свечи 21 зажигания через распределитель 23. Датчик 24 угла поворота коленчатого вала для вывода, например, двадцати — четыре импульсных сигнала на 720 ° CA (то есть два оборота коленчатого вала) предусмотрены на распределителе 23 для определения скорости NE двигателя в соответствии с интервалом между выходными импульсами датчика 24 угла поворота коленчатого вала. Кроме того, датчик 29 температуры воды для определения температуры охлаждающей воды THW установлен в блоке цилиндров двигателя 11.
Между тем выхлопная труба 26 соединена через выхлопной коллектор 25 с выхлопным отверстием (не показано) двигателя 11 и трехкомпонентным катализатором 27 для уменьшения вредных компонентов (например, оксида углерода, углеводородов, оксидов азота). в выхлопном газе расположен промежуточно в выхлопной трубе 26. Датчик 28 отношения воздух-топливо для вывода сигнала линейного отношения воздух-топливо, соответствующего соотношению воздух-топливо λ выхлопного газа, предусмотрен на стороне входа трехкомпонентной Катализатор 27.
Выходные данные описанных выше различных датчиков считываются в электронный блок 30 управления через входной порт 31. Электронный блок 30 управления состоит в основном из микропроцессора и снабжен ЦП 32, ПЗУ 33 и RAM 34 и резервное RAM 35. Электронный блок 30 управления вычисляет количество впрыскиваемого топлива TAU, время зажигания Ig и т.п., используя параметры рабочего состояния двигателя, полученные из различных выходных сигналов датчиков, и выводит сигналы, соответствующие вычисленным результатам, из выходных данных. порт 36 к клапанам 20 впрыска топлива и цепи 22 зажигания, тем самым управляя работой двигателя 11.Кроме того, электронный блок 30 управления определяет наличие или отсутствие отказа датчика 29 температуры воды с помощью процедуры диагностики отказа датчика температуры воды, показанной на фиг. 3, который будет описан позже, и загорается сигнальная лампа 37, чтобы информировать водителя о неисправности.
Обработка, выполняемая электронным блоком 30 управления, будет описана ниже со ссылкой на фиг. 2 и 3.
В программе, показанной на фиг. 2, обработка начинается, когда включается переключатель зажигания (не показан), и после этого выполнение повторяется посредством обработки прерывания в каждое заранее определенное время (например, каждые 4 мс), соответствующее управляющему устройству, как изложено в прилагаемой формуле изобретения.Когда начинается обработка базовой процедуры, сначала на этапе 100 считываются частота вращения NE двигателя и давление PM в воздухозаборнике, обнаруженные датчиком 24 угла поворота коленчатого вала и датчиком 17 давления в воздухозаборном трубопроводе, а затем на этапе 101 охлаждающая вода температура THW, определенная датчиком 29 температуры воды, вводится. Соответственно, на последующем этапе 102 процедура диагностики неисправности датчика температуры воды на фиг. 3 определяет, вышел ли из строя датчик 29 температуры воды, следующим образом.
В программе диагностики неисправности датчика температуры воды на фиг. 3, на этапе 121 определяется, превышает ли температура THW охлаждающей воды, определенная датчиком 29 температуры воды, температуру (например, 130 ° C), которая не может возникнуть в нормальном рабочем состоянии, и когда температура составляет 130 ° C или меньше, на следующем этапе 122 определяется, является ли температура THW охлаждающей воды чрезвычайно низкой температурой (например, -45 ° C), которая не может возникнуть даже в суровую зиму. То есть на этапах 121 и 122 определяется, является ли температура THW охлаждающей воды, определенная датчиком 29 температуры воды, температурой, которая не может возникнуть в нормальном состоянии, и когда температура THW охлаждающей воды является температурой, которая не может возникнуть в нормальном состоянии, вывод датчик 29 температуры воды определен как ненормальный.В этом случае результат определения «Да» дается на одном или другом из этапов 121 и 122, выполнение переходит к этапу 124, датчик 29 температуры воды определяется как неисправный, а на последующем этапе 125 загорается сигнальная лампа. 37 загорается, чтобы сообщить водителю о неисправности датчика 29 температуры воды.
В отличие от этого, когда температура охлаждающей жидкости THW, определенная датчиком 29 температуры воды, находится в пределах нормального диапазона температур (от -45 ° C до 130 ° C). ° C), результатом определения является «Нет» на обоих этапах 121 и 122, выполнение переходит к этапу 123, и датчик 29 температуры воды определяется как нормальный.
В случае, когда неисправность датчика 29 температуры воды была обнаружена программой диагностики неисправности датчика температуры воды, выполнение переходит к этапу 103 на фиг. 2, флаг неисправности датчика температуры воды FAILTHW установлен на «1», чтобы указать на неисправность, и на последующем этапе 104 температура воды, определенная датчиком 29 температуры воды, игнорируется, и температура THW охлаждающей воды принимается равной не менее 50 ° C — это температура после прогрева двигателя (например, 80 ° C.), и выполнение переходит к этапу 106. В отличие от этого, в случае, когда датчик 29 температуры воды в норме, выполнение переходит к этапу 105, флаг неисправности датчика температуры воды FAILTHW устанавливается на «0», чтобы указать нормальность, и выполнение переходит к этапу 106.
На этапе 106 базовое количество впрыскиваемого топлива Tp вычисляется по следующему уравнению, использующему скорость NE двигателя и давление PM в воздухозаборнике, как показано в уравнении (1): Tp = K × F1 (NE, PM) (1)
Здесь K — константа, а FI (NE, PM) — функция или двумерная карта, принимающая NE и PM в качестве параметров.
После этого, на этапе 107, базовое количество Tp впрыска топлива умножается на коэффициент FALL компенсации увеличения / уменьшения различного количества для определения количества TAU впрыска топлива. Здесь коэффициент компенсации увеличения / уменьшения различного количества FALL рассчитывается по следующему уравнению (2): FALL = FTHA × (1 + FOTP) × (FAF + FKG) × (1 + FASE + FWL) (2)
, где FTHA — коэффициент компенсации температуры всасываемого воздуха, FOTP — коэффициент увеличения величины повышения температуры выхлопных газов, FAF — величина компенсации обратной связи по соотношению воздух-топливо, FKG — величина компенсации обучения соотношению воздух-топливо, FASE — величина увеличения после запуска, а FWL — коэффициент компенсации температуры воды.
После того, как количество впрыскиваемого топлива TAU было вычислено с использованием различных коэффициентов компенсации увеличения / уменьшения количества FALL, на этапе 108 на фиг. 2, базовая установка угла опережения зажигания ABSE вычисляется по следующему уравнению (3) с использованием частоты вращения NE двигателя и давления PM в воздухозаборнике: ABSE = F2 (NE, PM) (3)
Здесь F2 (NE, PM) представляет собой функция или двухмерная карта с параметрами NE и PM.
Соответственно, на последующем этапе 109 базовая установка угла опережения зажигания ABSE добавляется к разному коэффициенту компенсации AALL угла опережения / угла запаздывания для определения момента опережения зажигания AOP.Здесь различные коэффициенты компенсации угла опережения / угла запаздывания AALL рассчитываются по следующему уравнению (4): AALL = ACLD + AHOT + AEGR + -AIDL-AACC (4)
, где ACLD — коэффициент компенсации угла опережения во время прогрева двигателя, AHOT — это компенсационный угол опережения для коэффициента перегрева, AEGR — это компенсационный угловой коэффициент опережения EGR, AIDL — это коэффициент опережения угла стабилизации холостого хода, а AACC — угловой запаздывание во время ускорения.
После того, как угол опережения зажигания был вычислен с использованием различных коэффициентов компенсации AALL угла опережения / угла запаздывания, этап 110 на фиг. 2 определяет, равен ли флаг неисправности датчика температуры воды FAILTHW «0», указывая на нормальность, и когда FAILTHW = 0 (нормальный), выполнение переходит к этапу 111, и значение DOP для приведения в действие поворотного соленоидного клапана для управления скоростью холостого хода 41 вычисляется следующее уравнение (5): DOP = DSTA + DTHW + DFB + DAC + DB (5)
где DSTA — это член компенсации во время запуска, DTHW — член компенсации температуры воды, DFB — член компенсации обратной связи, DAC — член компенсации условие компенсации кондиционера «включено», а DB — это условие компенсации электрической нагрузки.
Между тем, в случае, когда FAILTHW = 1 (отказ датчика 29 температуры воды) на этапе 110 на фиг. 2, выполнение переходит к этапу 112, и значение нагрузки DOP для приведения в действие ISCV 41 устанавливается равным 50%. Из-за этого ISCV 41 открывается по существу наполовину во время отказа датчика температуры воды, и обходной воздушный поток, подаваемый в двигатель 11, становится нейтральным.
РИС. 4 представляет собой график, показывающий взаимосвязь между рабочим значением DOP вращающегося соленоида типа ISCV 41 и температурой THW охлаждающей воды.Требуемое значение нагрузки ISCV 41 в состоянии полного прогрева двигателя (температура охлаждающей воды THW = 80 ° C) составляет приблизительно 30%. Требуемое значение коэффициента заполнения возрастает, когда температура охлаждающей воды THW падает, и значение рабочего цикла по запросу становится примерно 75%, когда температура охлаждающей воды THW составляет -20 ° C. Из-за этого апертурная характеристика ISCV 41 при нормальном режиме становится большей степенью открытие по мере того, как температура THW охлаждающей воды падает, и байпасный воздушный поток, подаваемый в двигатель 11, увеличивается.
Кроме того, верхнее предельное значение нагрузки (верхний предел защиты), при котором частота вращения холостого хода не увеличивается ненормально (перебег), и минимальное рабочее значение (нижний предел защиты), необходимое для обеспечения потока воздуха до такой степени, что не происходит остановка двигателя. показанный на фиг. 4. В основном, наихудшего состояния перебега, остановки двигателя и т.п. можно избежать, когда рабочий параметр DOP ISCV 41 находится в пределах верхнего или нижнего предельного диапазона защиты. Согласно предшествующему уровню техники эти верхние и нижние ограничители механически регулировались механизмом защиты биметаллического типа, так что не возникало наихудшего состояния выбега, остановки двигателя и т.п.
Например, когда датчик 29 температуры воды выходит из строя и напряжение, соответствующее чрезвычайно низкой температуре, выводится с датчика 29 температуры воды, несмотря на то, что на самом деле он находится в прогретом состоянии двигателя, значение нагрузки ISCV 41 превышает верхний предел. охранник, и если нет какой-либо охраны, происходит вторжение. Кроме того, когда напряжение, соответствующее температуре после прогрева двигателя, выдается из датчика 29 температуры воды во время отказа датчика 29 температуры воды, несмотря на то, что фактически он находится в состоянии низкой температуры, значение нагрузки ISCV 41 падает ниже нижнего предела. ограничитель, и если нет какой-либо защиты, двигатель глохнет.
Чтобы предотвратить это, в вышеупомянутом первом варианте осуществления задается рабочий параметр DOP для управления ISCV 41 на 50% во время отказа датчика 29 температуры воды, открывая ISCV 41 по существу наполовину и вызывая перепускной воздушный поток, подаваемый в двигатель 11, как нейтральный поток. Здесь «нейтральный поток» означает расход (значение нагрузки) не меньше нижнего предельного предохранителя и не больше верхнего предельного предохранителя в общем диапазоне температур на фиг. 4. Следовательно, до тех пор, пока он не меньше нижнего предельного предохранителя и не больше верхнего предельного предохранителя, допустимым расходом (значением нагрузки), кроме 50%, является.Таким образом, заставляя обводной воздушный поток во время отказа датчика 29 температуры воды быть нейтральным потоком, можно предотвратить наихудшее состояние выбега, остановки двигателя и т.п., а также возможность запуска при низкой температуре и работоспособность после прогрева двигателя. быть обеспеченным.
Кроме того, в ISCV, для которой фиксированное значение, удовлетворяющее условию быть не ниже нижнего предельного предохранителя и не выше верхнего предельного предохранителя в общем диапазоне температур, не существует, рабочее значение DOP во время сбоя температуры воды датчик может быть установлен на значение, близкое к ограничению верхнего предела, которое не конфликтует с ограничителем верхнего предела.Таким образом можно предотвратить перебег при выходе из строя датчика температуры воды. В этом случае способность к запуску при низкой температуре во время отказа датчика температуры воды ухудшается, но при плохой пусковой способности водитель заводит автомобиль, нажимая педаль акселератора, и поэтому запуск двигателя при низкой температуре также возможен.
Кроме того, вышеупомянутый первый вариант осуществления рассматривает температуру охлаждающей воды во время отказа датчика 29 температуры воды как температуру не менее 50 ° C., например, 80 ° C, и выполняет управление впрыском топлива и управление опережением зажигания. Другими словами, во время движения транспортного средства во время, отличное от холостого хода, прогрев двигателя закончился практически во всех случаях, за исключением короткого времени после запуска, и поэтому работоспособность после прогрева двигателя улучшается за счет учета температуры охлаждающей жидкости во время сбоя температуры воды. датчик 29 как температура после прогрева двигателя.
В вышеописанном первом варианте осуществления поворотный соленоидный клапан использовался в качестве клапана управления впускным воздухом холостого хода, но управление, идентичное предыдущему первому варианту осуществления, во время отказа датчика температуры воды применимо даже в системе, использующей линейный соленоидный клапан. .
Далее будет описан второй вариант осуществления настоящего изобретения в системе, обеспечивающей клапан ISC типа привода с шаговым двигателем промежуточно в перепускном впускном воздушном канале вместо этих клапанов ISC типа привода с соленоидом со ссылкой на фиг. 5 и 6.
Сначала будет кратко описана конструкция клапана 51 ISC с приводом от шагового двигателя со ссылкой на фиг. 5. Шаговый двигатель 52 включает в себя ротор 54, состоящий из постоянного магнита, на участке внутреннего диаметра обмотки 53 статора, и вращение ротора 54 преобразуется в вертикальное линейное движение и передается на вал 56 клапана через подающий винт. механизм 55.Игольчатый клапан 57 установлен на конце вала 56 клапана, и за счет регулирования величины его вертикального скользящего смещения с помощью ряда ступеней привода шагового двигателя 52 образуется открытая поверхность между игольчатым клапаном 57 и седлом клапана. 58 регулируется, а обводной воздушный поток регулируется.
РИС. На фиг.6 показано соотношение между количеством ступеней привода (соответствующих требуемому количеству всасываемого воздуха) и температурой охлаждающей жидкости двигателя в случае, когда использовался клапан 51 ISC типа привода шагового двигателя.В нормальном режиме количество шагов привода увеличивается по мере того, как температура охлаждающей воды падает, чтобы увеличить байпасный воздушный поток на холостом ходу, аналогично случаю вышеописанного клапана ISC с электромагнитным приводом.
В отличие от этого, байпасный воздушный поток является нейтральным потоком во время отказа датчика температуры воды, устанавливая количество шагов привода равным половине максимального количества шагов и открывая клапан ISC 51 по существу наполовину, избегая худшего состояние перебега, остановки двигателя и т.п., а также обеспечение возможности запуска при низкой температуре и работоспособности после прогрева двигателя.В этом случае также повышается работоспособность после прогрева двигателя за счет рассмотрения температуры охлаждающей жидкости во время отказа датчика 29 температуры воды как температуры после прогрева двигателя (т.е. 50 ° C или более) и выполнения управления впрыском топлива и управления опережением зажигания, аналогично предыдущему первому варианту осуществления. Кроме того, количество шагов возбуждения во время отказа датчика температуры воды не обязательно должно составлять половину максимального количества шагов и может быть установлено как количество шагов, так что байпасный воздушный поток становится нейтральным.
Вышеописанные первый и второй варианты осуществления настоящего изобретения реализуют настоящее изобретение при управлении скоростью холостого хода в способе перепускного воздуха, предусматривающем клапан 41 или 51 ISC в перепускном впускном воздушном канале 40 для обхода дроссельной заслонки 15, но настоящее изобретение применимо. также в способе прямого действия дроссельной заслонки для управления полностью закрытым положением дроссельной заслонки 15 с помощью привода 60, тем самым управляя потоком воздуха, проходящим через дроссельную заслонку 15, как показано на фиг. 7, без обводного канала 40 для всасываемого воздуха.При использовании метода прямого действия дроссельной заслонки приводной вал 61 привода 60 представляет собой полностью закрытый стопор рычага 63 дроссельной заслонки, соединенный с тросом 62 акселератора, и управляет потоком воздуха, проходящим через дроссельную заслонку 15, выталкивая и вставляя приводной вал. на холостом ходу, чтобы отрегулировать полностью закрытое положение стопора. Кроме того, хотя это не показано, двигатель постоянного тока, подающий винт для преобразования его вращательного смещения в линейное смещение приводного вала 61 и т.п. встроены в привод 60.
В устройстве, использующем такой способ прямого действия дроссельной заслонки, степень открытия дроссельной заслонки 15 в нормальном состоянии становится больше, когда температура охлаждающей воды падает, а поток всасываемого воздуха во время холостого хода увеличивается, как в третьем варианте осуществления, показанном на фиг. . 8.
В отличие от этого, байпасный воздушный поток является нейтральным потоком во время холостого хода, устанавливая степень открытия дроссельной заслонки 15 во время холостого хода как степень открытия, промежуточную между максимальной степенью открытия (степень открытия, когда при низкой температуре) и минимальная степень открытия (степень открытия при высокой температуре), то есть (максимальная степень открытия + минимальная степень открытия) / 2, во время отказа датчика температуры воды, предотвращение наихудшего режима выбега, остановки двигателя и т.п., а также обеспечение возможности запуска при низкой температуре и работоспособности после прогрева двигателя.В этом случае также повышается работоспособность после прогрева двигателя за счет рассмотрения температуры охлаждающей жидкости во время отказа датчика температуры воды как температуры после прогрева двигателя (т.е. 50 ° C или более) и выполнения управления впрыском топлива и управления опережением зажигания, аналогичным образом. к вышеизложенным первому и второму вариантам осуществления. Кроме того, степень открытия при выходе из строя датчика температуры воды не обязательно должна быть степенью открытия, промежуточной между максимальной степенью открытия и минимальной степенью открытия, и, по сути, может быть установлена как степень холостого хода открывание таким образом, что байпасный воздушный поток становится нейтральным.
Кроме того, этот вариант осуществления выполняет диагностику неисправности датчика 29 температуры воды с помощью процедуры диагностики неисправности датчика температуры воды на фиг. 3, но, конечно, диагностика отказов может быть выполнена другим методом.
Хотя настоящее изобретение было полностью описано в связи с его предпочтительным вариантом осуществления со ссылкой на прилагаемые чертежи, следует отметить, что различные изменения и модификации станут очевидными для специалистов в данной области техники.Следует понимать, что такие изменения и модификации входят в объем настоящего изобретения, как определено прилагаемой формулой изобретения.
Управление скоростью холостого хода — обзор
Управление скоростью холостого хода
Работа автомобильного двигателя на холостом ходу требует особого внимания. В режиме холостого хода водитель не воздействует на дроссельную заслонку через педаль акселератора. Двигатель должен создавать точно такой крутящий момент, который необходим для уравновешивания всех приложенных крутящих моментов нагрузки от трансмиссии и любых вспомогательных устройств, а также крутящих моментов внутреннего трения и накачки, чтобы работать с постоянной угловой скоростью (об / мин) холостого хода.Определенные моменты нагрузки возникают в результате действий водителя (например, переключение селектора коробки передач с парковки или нейтрали на движение или реверс и переключение электрических нагрузок). Однако некоторые другие моменты нагрузки возникают без прямой команды водителя (например, срабатывания муфты кондиционера).
Как и во всех режимах работы двигателя, крутящий момент, создаваемый двигателем на холостом ходу, определяется массовым расходом всасываемого воздуха. Электронный регулятор подачи топлива регулирует поток топлива для поддержания стехиометрии, пока двигатель полностью прогрет, и может на короткое время регулировать количество топлива, несколько превышающее стехиометрию, во время холодных запусков.Обычно при работе двигателя на холостом ходу электронное управление двигателем предназначено для работы двигателя с фиксированной частотой вращения независимо от нагрузки. Это достигается за счет регулирования массового расхода воздуха командой дроссельной заслонки от водителя на нуле. Воздушный поток, необходимый для поддержания желаемых оборотов холостого хода, должен поступать в двигатель через дроссельную заслонку с дроссельной заслонкой под небольшим, но ненулевым углом. В качестве альтернативы некоторые двигатели оснащены специальным воздушным каналом в обход дроссельной заслонки. Для любого метода требуется привод, позволяющий электронной системе управления двигателем регулировать MAF на холостом ходу.В главе 5 обсуждаются различные приводы, применяемые для управления потоком воздуха на холостом ходу. Для настоящего обсуждения мы предполагаем, что модель MAF на холостом ходу является представительной для практических конфигураций исполнительных механизмов, обсуждаемых в главе 5. (Обратите внимание, что в следующем анализе индекс I включен для всех переменных и параметров, чтобы подчеркнуть, что Настоящая система относится к управлению частотой вращения холостого хода.)
Независимо от конфигурации обхода воздуха на холостом ходу, массовый расход воздуха в состоянии холостого хода (который мы обозначаем M.aI) пропорционален перемещению подвижного элемента, который регулирует размер отверстия, через которое проходит воздух холостого хода (например, угол дроссельной заслонки θ T или его эквивалент x T в конструкции с байпасом холостого хода ). Для целей настоящего обсуждения мы предполагаем, что указанный крутящий момент двигателя на холостом ходу T iI определяется как
(4.38) TiI = KIM.aI
, где K I — постоянная для холостая воздушная система; далее предполагаем, что М.aI изменяется линейно в зависимости от положения переменной байпаса холостого хода x I :
(4,39) M.aI = KmxI
, где x I — отверстие в канале байпаса холостого хода, а K м постоянная для данной конструкции.
Обычно подвижный элемент в конструкции перепускного канала холостого хода включает в себя пружину, которая удерживает x I = 0 при отсутствии какого-либо срабатывания. Сила срабатывания (или крутящий момент) воздействует на силу (крутящий момент) этой пружины и внутреннюю силу (крутящий момент) при ускорении массы м I (или момент инерции для вращающейся конфигурации перепуска воздуха) подвижных элементов и сила трения (крутящий момент).В настоящее время мы предполагаем линейную модель движения исполнительного механизма:
(4,40) mIx¨I + dIx.I + kIxI = Kau
, где d I — постоянная вязкого трения, k I , — жесткость возвратной пружины, u — входной сигнал привода, а K a — постоянная привода.
Для этого обсуждения управления частотой вращения холостого хода также необходимо иметь модель взаимосвязи между указанным крутящим моментом и угловой скоростью двигателя на холостом ходу.Чтобы избежать путаницы с другими частотными переменными, мы адаптируем обозначение Ом I для угловой скорости коленчатого вала на холостом ходу (рад / с). Эта переменная дается формулой. (4.41)
(4.41) ΩI = πRPMI30
Где RPMI = RPMatidle
В целом для относительно небольших изменений в Ω I моменты нагрузки (включая моменты трения и откачки) могут быть представлены следующей линейной модель:
TLΩI = ReΩI
, где R e по существу постоянна для данной конфигурации двигатель / нагрузка при определенной рабочей температуре.Указанный крутящий момент на холостом ходу T iI имеет следующую приблизительную линейную модель:
(4,42) Ti≅JeΩ.I + TLΩ
, где J e — момент инерции двигателя и компонентов, вращающихся под нагрузкой. .
Используя методы преобразования Лапласа из Приложения A, можно получить передаточную функцию двигателя на холостом ходу H eI ( s ):
(4,43) HeIs = ΩIsTis
(4,44) = 1Jes + Re
Аналогичным образом передаточная функция для динамики привода холостого хода H aI ( s ) задается как
(4.45) HaIs = xIsus = KamIs2 + 2ζIωIs + ωI2
Где ωI = kI / mI
ζI = dI2mIωI
Эти передаточные функции могут быть объединены для получения передаточной функции (в стандартной форме) «установки» регулирования холостого хода. H pI ( s ):
(4,46) HpIs = ΩIsus
(4,47) = KaKmKIJemIs2 + 2ζωIs + ωI2s + ReJe
, где u — это управляющая переменная, передаваемая исполнительному механизму.
Управление холостым ходом с разомкнутым контуром нецелесообразно из-за больших колебаний нагрузки и изменений параметров из-за изменений условий эксплуатации.С другой стороны, регулятор CL хорошо подходит для регулирования холостого хода до желаемого значения. На рис. 4.26 представлена блок-схема такой системы регулирования холостого хода.
Рис. 4.26. Блок-схема системы регулирования холостого хода.
Используя процедуры анализа Приложения A и обозначив уставку холостого хода Ом с , можно показать, что передаточная функция CL управления холостым ходом H CLI задается
(4.48) HCLI. = ΩIsΩSs = HCIsHpII + HssHCIsHpIs
, где H cI — передаточная функция для регулятора холостого хода, а H s ( s ) — передаточная функция для датчика частоты вращения коленчатого вала.
В Приложении A представлены три стратегии управления: P, PI и PID. Из них только пропорциональный ( P ) нежелателен, поскольку он имеет ненулевую стационарную ошибку между Ом I и его желаемым значением ( Ом s ). В Приложении А также показано, что пропорционально-интегральный ( PI ) контроль имеет нулевую ошибку установившегося состояния, но потенциально может привести к нестабильной системе CL. Однако, в зависимости от параметров системы, существуют диапазоны значений как для пропорционального усиления ( K p ), так и для интегрального усиления ( K I ), для которых возможна стабильная работа и для которых регулируется частота вращения холостого хода. система имеет приемлемую производительность.Передаточная функция контроллера для управления PI задается формулой
(4.49) HcIs = Kp + KIs = Kps + s0s
В целях иллюстрации примерных характеристик управления холостым ходом мы предполагаем следующий набор параметров:
ζI = 0,5ωI = 25рад / сωe = Re / Je = 10рад / сKnum = KaKmKI = 250Kden = JemI = 0,05s0 = KI / Kp = 10
Передаточная функция вперед H F ( с ) определяется следующее выражение:
(4.50) HFs = HcIsHpIs = Knums + s0Kdens3 + 2ζωIs2 + ωI2ss + ωe
Настоящий анализ упрощается, если принять идеальный датчик угловой скорости, такой что H s ( s ) = 1.В этом случае передаточная функция управления холостым ходом CL ( H CLI ( s )) задается уравнением. (4.51)
(4.51) HCLIs = KpHFs1 + KpHFs
Влияние пропорционального усиления на стабильность этого регулятора холостого хода CL можно оценить с помощью методов корневого годографа, как объяснено в Приложении A. Рис. 4.27 представляет собой график корня место для этого регулирования холостого хода с предполагаемыми параметрами.
Рис. 4.27. Корневая точка для управления холостым ходом.
Из этого рисунка видно, что все полюса CL начинаются в левой полуплоскости комплексной плоскости и все стабильны.Однако, когда K p увеличивается, пара полюсов пересекает правую полукомплексную плоскость и становится нестабильной. Используя функцию MATLAB «курсор данных» под панелью инструментов на графике корневого годографа, можно увидеть, что для K p = 1,2 полюса, которые мигрируют в правую часть комплексной плоскости, являются стабильными и имеют коэффициент демпфирования около 25%.
Использование этого значения для K p (т.е. K p = 1.2), динамический отклик системы CL был исследован путем подачи команды на ступенчатое изменение числа оборотов с начальных 550–600 об / мин при t = 0,5 с. Рис. 4.28 представляет собой график динамической реакции холостого хода двигателя (в об / мин) на этот ввод команды.
Рис. 4.28. Ступенчатая характеристика регулятора холостого хода.
Видно, что частота вращения на холостом ходу достигает командных оборотов в минуту после короткой переходной реакции с нулевой установившейся ошибкой.
Параметры, используемые в этом моделировании управления частотой вращения холостого хода, не обязательно являются репрезентативными для какого-либо конкретного двигателя.Скорее, они были выбраны для иллюстрации характеристик этой важной функции управления двигателем. В главе 6, где обсуждается цифровое управление двигателем (силовой передачей), моделируется дискретное управление.
FACET Srl | Термовыключатели и датчики температуры воды
Устройства этой серии предотвращают перегрев двигателя за счет включения вентиляторов охлаждения радиатора, измерения температуры охлаждающей жидкости и управления указателями уровня и сигнальными лампами на блоке управления двигателем.
Они могут иметь до четырех выводов и устанавливаться на радиаторе, трубках системы охлаждения или термостате, чтобы охлаждающая жидкость протекала через чувствительный элемент (биметаллический диск или термистор).
Составные части и принцип работы
Термовыключатели активируются вогнутым или выпуклым биметаллическим диском, который размыкает и замыкает контакты, расположенные внутри них, и делятся на две категории:
— tipo circuito N / A normalmente aperto
— tipo circuito N / C normalmente chiuso
Диск меняет форму при изменении температуры.
При достижении температуры теплообмена термочувствительный диск «щелкает», замыкая электрическую цепь.
Основные причины отказа
— Окисление контактов
— Закупорка биметаллического диска
— Неисправность термистора
— Потеря герметичности при попадании воды или влаги в выключатель
— Потеря эластичности в прокладках разъема
Последствия отказа
Если диск заклинивает при разомкнутой электрической цепи, выключатель не может активировать электрический вентилятор, что вызывает перегрев жидкости с возможностью серьезного повреждения двигателя.
Если электрическая цепь остается замкнутой, вентилятор продолжает работать, вызывая потерю мощности.
Если датчик отправляет неверную информацию в блок управления двигателем, выдается сообщение об ошибке, что может привести к проблемам с регулировкой впрыска топлива.
Типы термовыключателей и датчиков температуры Facet
ТехнологияFacet идет в ногу с эволюцией управления температурой, предлагая широкий спектр решений: от простых дисковых переключателей для электромеханического управления вентиляторами до самых сложных датчиков температуры, оснащенных термисторами, которые отправляют информацию о температуре и сигналы тревоги в систему управления двигателем. Блок.
Распознавание ограничений датчика температуры двигателя
В первой части этой серии, «Расчет практического запаса безопасности для горячей точки», мы обсудили, как двухпараметрические тепловые модели предполагают, что весь двигатель, включая обмотки, демонстрирует одну динамическую температуру. Производители и пользователи серводвигателей чаще всего применяют эту упрощенную тепловую модель для расчета рабочего цикла — и большинство производителей публикуют только одно значение для любого данного теплового сопротивления обмотки двигателя окружающей среде R th с тепловой постоянной времени.По этой причине пользователи двигателей должны производить расчеты рабочего цикла с использованием этой двухпараметрической модели, если только они не тестируют и не измеряют рабочие температуры двигателя в доме, что маловероятно.
Можно утверждать, что с правильными датчиками для защиты двигателя от перегрева упрощенная модель приемлема. Однако, как мы рассмотрим в этой статье, даже у этого подхода есть ограничения.
Номинальные параметры двигателя
Типовые листы типичных бесщеточных серводвигателей постоянного тока (BLDC) обычно включают непрерывные или кривые крутящего момента-скорости для безопасной рабочей зоны плюс прерывистые пиковые кривые.Кривая крутящего момента-скорости в безопасной рабочей области определяет границу крутящего момента-скорости, в пределах которой двигатель может работать безопасно и неограниченно без превышения максимальной продолжительной рабочей температуры при питании от указанного привода в определенных условиях окружающей среды.
Опубликованные кривые пиковый крутящий момент-скорость обычно указывают отношение максимального крутящего момента к продолжительному крутящему моменту не менее 2: 1 или даже соотношение 4: 1 или 5: 1, если двигатель рассчитан на это. Однако слишком долгая команда серводвигателю на выдачу пикового крутящего момента, превышающего его максимальное постоянное значение 1x, приводит к перегреву.
Показательный пример: 4-кратный пиковый крутящий момент соответствует 16-кратному рассеиванию мощности в электрической обмотке двигателя. Почему? Поскольку выходной крутящий момент увеличивается линейно с током, рассеиваемая мощность на электрическом сопротивлении составляет I 2 R , где I равняется току, а R равняется сопротивлению обмотки.
Короче говоря, команда серводвигателя на выходной пиковый крутящий момент является нормальным (и допустимым), но рабочий цикл должен быть ниже 100%, иначе обмотки двигателя могут перегреться и даже выйти из строя.
Тепловые модели
Используемая более 50 лет двухпараметрическая тепловая модель предполагает, что любой данный двигатель имеет одну динамическую рабочую температуру и одно тепловое сопротивление обмотки относительно окружающей среды R th (¢ XC / Вт) параллельно с тепловой емкостью C th (джоуль / ° C). Это модель, аналогичная простой RC-электрической схеме: решение этой двухпараметрической тепловой модели как для постоянного нагрева рассеиваемой мощности, так и для охлаждения при нулевом рассеивании мощности показывает, что двигатель как нагревается, так и охлаждается предсказуемо и экспоненциально с тепловой постоянной времени T ( сек), где T = R th C th .По этой причине в технических паспортах серводвигателей обычно указываются как R th , так и T , что позволяет рассчитать двухпараметрическую тепловую емкость двигателя.
Четырехпараметрическая тепловая модель является более современной и точной для прогнозирования температуры обмотки, когда ток, подаваемый на серводвигатель, превышает постоянный ток 1x. Измерения показывают, что даже внутри обмоток двигателя могут быть значительные перепады температур.
Кроме того, термодинамика диктует, что для того, чтобы тепловая энергия протекала изнутри двигателя к его внешней открытой поверхности (и, в конечном итоге, в окружающую окружающую среду), должен существовать температурный градиент внутри двигателя и между ним и окружающей средой.
В зависимости от размера двигателя и рабочей температуры разница температур между электрической обмоткой двигателя и ее открытой внешней поверхностью может составлять от 30 ° C до 50 ° C — слишком большая, чтобы ее игнорировать. Обмотка двигателя имеет собственную динамическую рабочую температуру и тепловое сопротивление, а также тепловую постоянную времени, которая отличается от остальной части двигателя.
Четыре значения измеренных параметров (и четырехпараметрическая тепловая модель) для одного конкретного серводвигателя диаметром 60 мм показаны на Рис.1. При однократном постоянном рассеянии мощности температура обмотки начинает расти сразу после температуры окружающей среды 25 ° C. Однако корпус (и корпус двигателя) демонстрируют запаздывание по времени повышения температуры. Как мы вскоре рассмотрим, это отставание является центральным элементом ограничений датчиков температуры, используемых для защиты от перегрева, особенно если датчик не прикреплен непосредственно к обмотке.
Для нашего 60-мм серводвигателя температура обмотки в конечном итоге стабилизируется на номинальном максимальном продолжительном значении 130 ° C; температура корпуса стабилизируется на уровне 100 ° C при температуре окружающего воздуха 25 ° C.Однако этот градиент 30 ° представляет другую проблему: где следует устанавливать датчики температуры и какой тип следует использовать? Установка на обмотке может показаться лучшей, но, как мы подробно рассмотрим, такая компоновка подвергает систему нежелательному отключению.
Страница 2 из 3
В любом случае, рассмотрим Рис. 2 : Наш 60-миллиметровый серводвигатель с 1-кратным непрерывным рассеиванием мощности показывает, что повышение температуры обмотки, рассчитанное по четырехпараметрической модели, действительно растет быстрее, чем по двухпараметрической модели.Однако обе кривые сходятся при номинальной максимальной продолжительной температуре обмотки 130 ° C.
Фактически, это свойство, согласованное между двумя моделями для 1-кратного непрерывного рассеивания мощности … что означает, что более простая двухпараметрическая тепловая модель обеспечивает разумную точность в динамической оценке температуры обмотки, если рассеиваемая мощность внутри двигателя не превышает его 1-кратное максимальное непрерывное значение.
В реальных приложениях серводвигатели работают иначе.Вместо этого серводвигатели, рассчитанные на более тяжелые условия эксплуатации, часто получают команды для создания динамических профилей движения, которые включают периоды времени, требующие 2-кратного или даже 4-кратного максимального выходного крутящего момента.
На рис. 3 сравнивается динамическое повышение температуры обмотки для обеих тепловых моделей — только на этот раз мы предполагаем, что пиковый выходной крутящий момент 2 × соответствует 4 × рассеиваемой мощности в электрической обмотке двигателя.
При 2-кратном максимальном выходном крутящем моменте и 4-кратном рассеивании мощности четырехпараметрическая модель показывает, что температура обмотки повышается до номинального значения 130 ° C за 140 секунд, в то время как двухпараметрическая модель отстает, прогнозируя температуру обмотки менее 80. ° C существенная и недопустимая разница.Эксперименты подтверждают эту ошибку.
Когда рассеиваемая мощность превышает 1-кратное максимальное непрерывное значение, двухпараметрическая модель становится очень неточной, и динамическая разница температур между двумя тепловыми моделями ухудшается с увеличением рассеиваемой мощности.
См. Рис. 4. Динамическая температура обмотки во время нагрева для обеих моделей показывает, что наш двигатель создает 4-кратный пиковый крутящий момент, что соответствует 16-кратному рассеиванию мощности в электрической обмотке двигателя. Обратите внимание, как при 4-кратном максимальном выходном крутящем моменте и 16-кратном рассеянии мощности четырехпараметрическая модель предсказывает температуру обмотки до 130 ° C всего за 25 секунд, в то время как двухпараметрическая модель отстает и занижает температуру на 62 ° C.
Ограничения датчика
Как уже упоминалось, датчики температуры обычно используются для предотвращения перегрева и обеспечения соответствия двигателей требованиям UL 1446. С этой целью некоторые производители устанавливают внутри двигателя датчики или переключатели температуры, которые отключают питание привода, когда обмотка приближается к максимально допустимой температуре горячей точки. Однако коммутаторы часто не могут достаточно быстро реагировать на опасные ситуации и скачки температуры в горячих точках.
Поэтому для защиты обмоток от перегрева во всех возможных режимах работы некоторые производители устанавливают датчики и (если позволяет пространство) прикрепляют их непосредственно к обмоткам.Эти датчики температуры затем сигнализируют приводу, когда динамическая температура обмотки достигает максимально допустимого значения; в свою очередь, привод должен отключать питание двигателя. Иногда производители даже размещают реле температуры последовательно с каждой фазой многофазной электрической обмотки двигателя в соответствии со стандартом защиты от перегрева UL 2111.
Страница 3 из 3
Однако новое исследование показывает, что даже датчик температуры, прикрепленный непосредственно к электрической обмотке серводвигателя, не всегда защищает двигатель от перегрева.
Пересмотреть четырехпараметрическую оценку нагрева обмотки и корпуса при 1-кратном рассеивании мощности.
Показано в Рис. 5 — это динамический нагрев обоих — только на этот раз двигатель генерирует 4-кратный максимальный выходной крутящий момент, что соответствует 16-кратному рассеянию мощности.
Здесь четырехпараметрическая модель вычисляет, что при 4-кратном максимальном крутящем моменте и 16-кратном рассеивании мощности температура обмотки быстро повышается с 25 ° C до номинального значения 130 ° C всего за 25 секунд. Между тем температура корпуса поднимается только до 30 ° C.Фактически, при 16-кратном рассеивании мощности нагрев обмотки является адиабатическим с небольшой тепловой мощностью, передаваемой корпусу в течение первых 25 секунд.
В следующие 70 секунд обмотка приближается к 280 ° C и сейчас находится в процессе догорания, в то время как корпус едва достиг 40 ° C. Напротив, если использовать двухпараметрическую модель для расчета динамического повышения температуры всего двигателя, обмотки будут неточно оценены как менее чем номинальное значение 130 ° C за 70 секунд.
Ограничения датчика
Производители серводвигателей должны решить, какой тип датчика температуры использовать: термопару, термистор или реле температуры.Предполагается, что этот датчик вместе с приводом защищает двигатель от перегрева во всех возможных режимах работы, но не вызывает нежелательных отключений двигателя.
Многие коммерческие приводы взаимодействуют только с реле температуры, а не с термисторами или термопарами. Кроме того, большинство современных приводов используют широтно-импульсную модуляцию (ШИМ) для создания выходного напряжения и тока… а ШИМ-приводы имеют электрические помехи. Здесь точное измерение динамической температуры обмотки с помощью термопары затруднено из-за этого электрического шума.По этим причинам многие серводвигатели содержат либо температурный выключатель, либо термистор, установленный внутри двигателя.
Расположение
Где лучше всего устанавливать датчики температуры внутри двигателя? Четырехпараметрическая тепловая модель показывает, как быстрее всего нагреваются обмотки двигателя, что может указывать на необходимость установки датчиков на обмотках двигателя.
Обратите внимание: многие производители рекламируют соответствие своих двигателей стандартам UL 1004 и CSA 22.2. Чтобы соответствовать этим стандартам, электрическая изоляция должна быть изготовлена в соответствии со стандартом системы изоляции UL 1446.Как описано в UL 1446, Раздел 4 и Таблица 4.1, максимально допустимая температура очага обмотки, возникающая в любой момент и время, определяется Классом изоляции, используемым для создания обмотки. Следовательно, чтобы соответствовать UL 1446, изоляция обмотки должна иметь максимальную температуру горячей точки, равную или превышающую максимальную постоянную температуру обмотки.
Для обеспечения запаса прочности при перегреве при максимальном выходном крутящем моменте имеет смысл конструировать обмотки двигателя с использованием изоляции более высокого класса, чтобы никогда не превышалась максимальная температура горячей точки обмотки или не нарушалось UL 1446.
Чтобы серводвигатель соответствовал требованиям UL 1446, не следует ли размещать датчик температуры в той точке электрической обмотки двигателя, где возникает его горячая точка? На самом деле это не всегда возможно, особенно в серводвигателях меньшего диаметра от 20 до 90 мм. Как уже упоминалось, многие приводы с серводвигателями взаимодействуют только с температурными реле, такими как Thermik SO1.
Учитывая физический размер термореле и плотность упаковки электрических обмоток этих двигателей, производители часто прикрепляют переключатели к концевым виткам обмотки.Однако конечный виток не всегда соответствует местоположению горячей точки обмотки.
Фактически, во многих серводвигателях диаметром от 20 до 60 мм производители размещают температурный переключатель внутри двигателя, но (из-за физических размеров переключателя и обмотки) этот «нормально замкнутый» переключатель не прикреплен к обмотке. вообще, поэтому динамические температуры обмотки напрямую не измеряются.
Другие производители серводвигателей также указывают двигатели с изоляцией класса B (130 ° C) или класса F (155 ° C), но в качестве максимальной продолжительной температуры обмотки указывают 130 ° C или 155 ° C.Кроме того, они могут указать 4: 1 или даже 5: 1 в качестве отношения пикового крутящего момента к постоянному, хотя это не обеспечивает запаса прочности между максимальной продолжительной температурой обмотки и максимальной температурой горячей точки.
Графики четырехпараметрической тепловой моделипоказывают, как быстрее всего нагревается электрическая обмотка серводвигателя. По мере того, как максимальный выходной крутящий момент двигателя увеличивается выше 1-кратного непрерывного значения, динамическая разница температур между обмоткой и корпусом становится все больше… и выше 2-кратного максимального крутящего момента начальный нагрев обмотки является адиабатическим, и рост температуры в случае запаздывания.
Таким образом, при отсутствии запаса прочности между максимальной продолжительностью обмотки и температурой ее горячей точки фактическое измерение показывает, что при более чем 2-кратном максимальном выходном крутящем моменте чрезвычайно трудно (если не невозможно) датчику температуры двигателя, не прикрепленному напрямую к обмотке, среагировать. достаточно быстро, чтобы предотвратить (с приводом) превышение максимальной температуры горячей точки обмотки и нарушение UL 1446.
Даже если датчик температуры прикреплен непосредственно к обмотке, он может не находиться в месте ее перегрева.
