что это такое, принцип работы, виды, для чего используется
Принцип действия
Работа устройства происходит по принципу обратного взаимодействия с системными сигналами. Сервопривод в определенный момент времени получает входящие параметры регулирующего значения и поддерживает его на выходе производимого элемента.
Конструкция устройства
Механизм подобного типа обычно имеет следующие составляющие:
- Привод — электрический мотор с редуктором или похожие устройства. Необходим для уменьшения скорости движения, если она слишком большая.
- Датчик обратной связи или потенциометр, меняющий угол поворота вала.
- Блок, отвечающий за управление и питание.
- Вход или конвертер.
В принципе работы самого простого варианта лежит схема обрабатывания значений, исходящих от датчика обратной связи и настраиваемых входящих сигналов для подачи напряжения необходимой полярности на двигатель.
Разновидности
Различают два вида сервоприводов:
- Синхронные – задают темп скорости вращения двигателя и другие параметры, быстрее достигая указанной скорости вращения.
- Асинхронные – способны сохранять работу двигателя даже при низких оборотах.
Также устройства разделяют на электромеханические и электрогидромеханические по особенностям конструкции и принципу работы.
Основные характеристики
Механизмы имеют ряд параметров, характеризующих их работу:
- Усиление на валу оказывает прямое влияние на крутящий момент. Это значение является одной из ключевых характеристик, в паспорте устройства может указываться несколько параметров для различных величин напряжения.

- Скорость поворота также имеет важное значение в работе механизма. Обычно указывается в параметре времени – необходимо, чтобы выходной вал изменил свое направление на 60 градусов.
- Указывается тип устройств — цифровой или аналоговый. Цифровые управляются при помощи кодовых команд, которые последовательно передаются через интерфейс. Аналоговые управляются через подачу разных частот, параметры которых задаются определенным образом.
- Питание может быть различным, но у большинства таких агрегатов оно находится в диапазоне 4,8-7,2 вольта.
- Угол поворота. Обычно это значение в 180 или 360 градусов.
- Сервопривод может быть переменного или постоянного вращения.

Имеет значение материал изготовления. Детали могут быть металлическими, пластиковыми, либо в комбинированном составе.
Управление серводвигателем
К устройству по присоединенному к нему проводу подается управляющий сигнал, представляющий собой импульсы постоянной частоты и переменной ширины.
Серводвигатели отличаются своим разнообразием по конструкции и принципу действия. Модели бывают со щетками и без щеток. Первая категория представлена двигателями постоянного тока. Устройства, имеющие щетки, более разнообразны – к ним относятся шаговые двигатели и работающие от переменного тока. Последняя группа делится еще на два вида — синхронные и асинхронные. Синхронные двигатели, в зависимости от особенностей работы, могут быть вращающимися или линейными.
В работе моторов также используется сервоусилитель – это элемент конструкции, который обеспечивает подачу питания и управление двигателем с постоянными магнитами. Может работать при необходимости и в автономном режиме, при помощи специальной программы, которая предварительно загружается в память устройства.
Агрегаты, гарантирующие высокую точность работы, являются весьма востребованными. Подобные двигатели широко применяются в различных сферах промышленности, всевозможных станках и оборудовании, автомобилестроении.
Область применения
В данный момент сервоприводы получили достаточно широкое распространение. Их можно встретить в точных приборах, автоматах, производящих различные платы, программируемых станках, промышленных роботах и других механизмах. Большую популярность приводы такого типа приобрели в авиамодельной сфере за счет эффективного расхода энергии и равномерного движения.
Сервоприводы меняются и развиваются. В самом начале появления они обладали коллекторными моторами с обмотками на роторе. Постепенно число обмоток выросло, также увеличилась и скорость вращения и разгона. Позже обмотки начали располагаться снаружи магнита, что также способствовало повышению эффективности работы. Дальнейшие усовершенствования позволили отказаться от коллектора, стали использоваться постоянные магниты ротора. Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Возможность достижения высокой точности часто становится решающим фактором для применения сервопривода. Кроме того, благодаря новым цифровым разработкам, позволяющим предусмотреть различные способы связи с объектами, система использует компьютер для управления и настройки, что значительно упрощает работу.
В различных сферах также используются серводвигатели. Они могут перемещать выходной вал в заданное положение и удерживать его автоматически. Также помогут придать движение какому-либо механизму, координируемому вращениями вала. Для мотора важными параметрами являются равномерность и тональность движения, эффективность затрачиваемой энергии.
Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность. Именно продолжительность импульса определяет угол поворота двигателя.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса.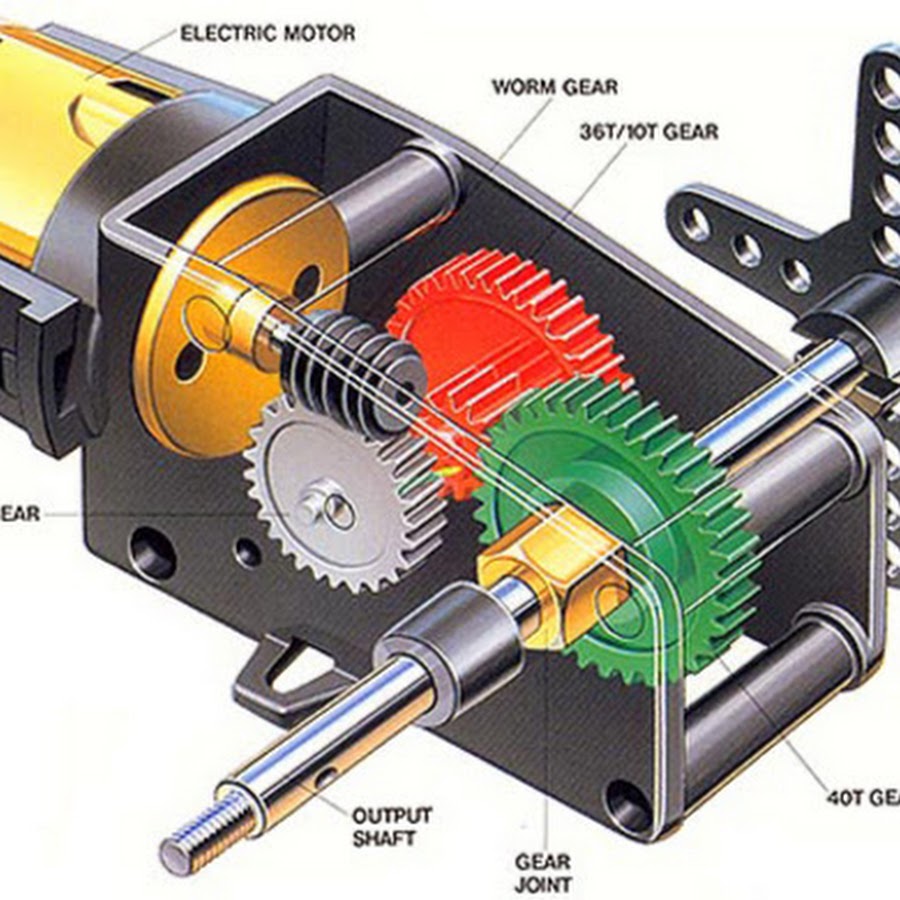
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
Серводвигатели
Современные технологии требуют использования более совершенных приводов. Объективным решением является использование серводвигателей. Они способны обеспечить высокую работоспособность оборудования, при этом производя минимум шума. Для более ровного хода сервомотора используются инверторы, обеспечивающие плавные переходы между ходовыми режимами. Главным преимуществом такого двигателя является широкий спектр характеристик, которые, можно изменять дистанционно.
Объективным решением является использование серводвигателей. Они способны обеспечить высокую работоспособность оборудования, при этом производя минимум шума. Для более ровного хода сервомотора используются инверторы, обеспечивающие плавные переходы между ходовыми режимами. Главным преимуществом такого двигателя является широкий спектр характеристик, которые, можно изменять дистанционно.
Устройство и разновидности серводвигателей
Конечно же, серводвигатели, как и любое наиболее современное оборудование, имеют несколько классификаций, которые способствуют выбору наиболее оптимального варианта. Таким образом, серводвигатели делятся на два основных подвида:
1. Коллекторные. В качестве питания используется лишь постоянный ток.
2. Безколлекторные. Возможно использования как переменного, так и постоянного тока.
АС-маркировка серводвигателей переменного тока. Такой вид двигателей является более дешёвым. На рынке представлены два вида серводвигателей переменного тока:
На рынке представлены два вида серводвигателей переменного тока:
1. Синхронный. Вращение ротора и магнитного поля совпадают и имеют одно направление относительно статора.
2. Асинхронный. Направление вращения ротора противоположно вращению магнитного поля.
При этом управление асинхронными устройствами, осуществляется за счёт изменений параметров подаваемого тока.
DC — такую маркировку имеют серводвигатели, обладающие, в качестве привода, постоянной подачей тока. Такие серводвигатели чаще всего применяют для непрерывной работы, так как они более стабильны. Однако управление такого рода двигателями также осуществляется за счёт изменения параметров подаваемого тока.
Принцип работы и управление серводвигателями
Конечно же, довольно важно рассмотреть общие аспекты работы серводвигателей, ведь вне зависимости от приводящих механизмов, важна их техническая составляющая.
Первым аспектом, который важно отметить является условие работы серводвигателя строго в системе G-кодов. Другими словами движущие элементы двигателя ориентируются по 3 основным осям координат (соответственно это X,Y,Z). При этом за разность в значениях координат отвечают импульсы энергии, которые подаются на двигатель. При каком-либо смещении, относительно оси координат, рабочие параметры серводвигателя также изменяются.
Системы ЧПУ, при работе таких механизмов, как серводвигатели, остаются идеально сбалансированными, что обеспечивает высокую производительность без потерь в качестве. Однако не стоит полностью полагаться на датчики ЧПУ и необходимо самостоятельно проверять работу серводвигателей. При всей надёжности подобного оборудования контроль оператора ЧПУ необходим, при этом желательно, чтобы работник (оператор) имел специальное образование.
В соответствии с вышеприведёнными данными, использование таких устройств, как серводвигатели, на оборудовании ЧПУ является наиболее эффективным. При их эксплуатации повышается не только качество продукции, но и максимально оптимизируется труд операторов. Кроме того, более совершенные приводы оборудования, несомненно, повышают его производительность, что имеет большую степень значения для компаний-производителей, не имеющих обширных производственных площадей и прочих территориальных и финансовых возможностей. При всём этом количество сотрудников не возрастёт.
При их эксплуатации повышается не только качество продукции, но и максимально оптимизируется труд операторов. Кроме того, более совершенные приводы оборудования, несомненно, повышают его производительность, что имеет большую степень значения для компаний-производителей, не имеющих обширных производственных площадей и прочих территориальных и финансовых возможностей. При всём этом количество сотрудников не возрастёт.
Стоимость серводвигателей определяется мощностью устройства, так как мощностной уровень сказывается на производительности функционирования всего оборудования, работающего при помощи данных механизмов. Также, немалую роль играет компактность и легкость в установочном обслуживании серводвигателей.
что это такое, устройство, принцип работы, виды
Вряд ли сегодня кого-то можно удивить тем количеством электрических приборов, которые окружают человека в повседневной жизни. Многие из которых давно взяли на себя часть человеческого труда и обязанностей. Повсеместная автоматизация процессов охватила самые разнообразные отрасли, начиная автомобилестроением, и заканчивая устройствами в быту. Львиную долю нагрузки относительно автоматического управления параметрами работы умных машин берет на себя сервопривод.
Повсеместная автоматизация процессов охватила самые разнообразные отрасли, начиная автомобилестроением, и заканчивая устройствами в быту. Львиную долю нагрузки относительно автоматического управления параметрами работы умных машин берет на себя сервопривод.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы
Рис. 1. Устройство сервоприводаУстройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
- Привода – устройства, приводящего в движение рабочий орган. Может выполняться посредством синхронного или асинхронного двигателя, пневмоцилиндра и т.д.
- Передаточный механизм – система шестеренчатой кривошипной или другой передачи, редуктор.
- Рабочий элемент – управляет перемещением в пространстве, непосредственно вал редуктора, передаточный механизм и т.д.
- Датчик – сигнализирует о достигнутом положении и передает информацию по каналу обратной связи.
- Блок питания – может применяться в случае прямого подключения сервопривода к сети, где требуется преобразование уровня и типа напряжения.
- Блок управления – осуществляет подачу управляющих сигналов на сервомотор для передвижения или корректировки места положения. Для этого применяются микропроцессоры, микроконтроллеры и т.д. К примеру, очень популярна плата Arduino.

Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
Рис. 2. Сравнение с сервопривода с шаговым двигателемВполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
- Могут использовать для привода любой тип электрической машины – синхронный, асинхронный, электродвигатель постоянного тока и т.д.
- Точность механического привода не зависит от износа деталей, появления люфтов, термических и механических изменений конструктивных элементов.
- Диагностирование неисправностей происходит моментально за счет обратной связи.
- Скорость вращения – любой обычный электродвигатель вращается быстрее шагового привода.
- Экономичность – вращение вала у шаговой электрической машины осуществляется при максимально допустимом напряжении питания, чтобы обеспечить максимальный момент.
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
- Сложность системы управления и необходимость реализации ее работы – шаговый двигатель контролируется обычным счетчиком числа импульсов.
- Необходимость контролировать как частоту вращения, так и принимать меры для принудительного затормаживания в нужной точке – это приводит к дополнительным затратам энергии, программных и механических ресурсов.
- Обязательно используется дополнительный измерительный блок, контролирующий положение рабочего органа.
- Сервопривод обладает значительно большей стоимостью, поэтому применение шагового двигателя обходится дешевле.
Назначение
Рис. 3. Область примененияСервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.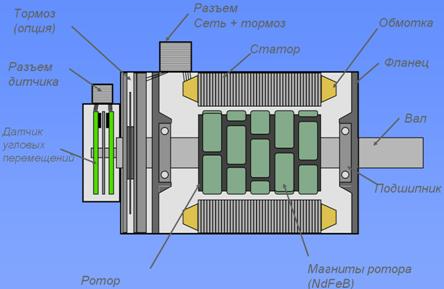 д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
- асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
- синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
- линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
- электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
- гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:
- полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
- металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
- карбоновые – имеют средние
характеристики по прочности и износоустойчивости, в сравнении с двумя
предыдущими, но имеют более высокую стоимость.
По типу вала двигателя:
- с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
- с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
- с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
- Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.
 6. Усилие на валу
6. Усилие на валу- Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
- Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
- Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
- Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.
Способы управления
Рис. 7. Способ управления сервоприводомПо способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 8 приведен пример управления сервоприводом с помощью подаваемых импульсов:
Рис. 8. Схема управления сервоприводомКак видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Преимущества и недостатки
К преимуществам сервопривода следует отнести:
- Универсальность
устройства – может с легкостью устанавливаться в самые различные приборы, так
как технические особенности редко влияют на конечный результат.
- Может реализовать широкий спектр крутящего момента за счет использования редуктора и изменения передаточного числа.
- Обладает большим ускорением, что значительно повышает продуктивность и сокращает сроки выполнения работы.
- Точное выставление позиции благодаря проверке места положения на датчике.
- Не боится перегрузок, что увеличивает срок службы, позволяет работать и в аварийных ситуациях.

К недостаткам следует отнести:
- Относительно большую стоимость – наличие обратной связи, датчиков и прочего вспомогательного оборудования обуславливает повышение себестоимости сервопривода.
- Износ передаточного механизма – в значительной мере ухудшает точность и эффективность, требует замены.
- Более сложная настройка работы – требует изменения параметров программного обеспечения или полной замены сервопривода.
Принцип работы сервоприводов
Принцип работы
Вентильные электродвигатели
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины. На роторе находятся постоянные магниты из редкоземельных металлов, на статоре — якорная обмотка. Коммутация обмоток статора осуществляется полупроводниковыми силовыми ключами (транзисторами) так, чтобы вектор магнитного поля статора был всегда перпендикулярен вектору магнитного поля ротора — для этого используется датчик положения ротора (датчик Холла или энкодер). Фазный ток регулируется с помощью ШИМ-модуляции и может иметь трапецеидальную или синусоидальную форму.
Линейные серводвигатели
Плоский ротор линейного двигателя сделан из редкоземельных постоянных магнитов. По принципу действия он похож на вентильный двигатель.
Шаговые электродвигатели
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса,
на которых расположены катушки обмоток управления – их коммутация выполняется внешним приводом.
Рассмотрим принцип работы реактивного шагового двигателя, у которого на полюсах статора расположены зубцы, а ротор выполнен из магнитомягкой стали и тоже имеет зубцы. Зубцы на статоре расположены так, что на одном шаге магнитное сопротивление меньше по продольной оси двигателя, а на другом – по поперечной. Если дискретно возбуждать в определённой последовательности обмотки статора постоянным током, то ротор при каждой коммутации будет поворачиваться на один шаг, равный шагу зубцов на роторе.
Сервопривод
Некоторые модели преобразователей частоты могут работать как со стандартными асинхронными двигателями, так и с серводвигателями. То есть основное отличие сервоприводов не в силовой части, а в алгоритме управления и скорости вычислений. Поскольку в программе используется информация о положении ротора, то у сервопривода есть интерфейс для подключения энкодера, установленного на валу двигателя.
Сервоконтроллер
В сервосистемах используется принцип подчинённого управления: контур тока подчинён контуру скорости,
который в свою очередь подчинён контуру положения (см. теорию автоматического управления).
Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним
настраивается контур положения.
теорию автоматического управления).
Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним
настраивается контур положения.
Контур тока всегда реализован в сервоприводе.
Контур скорости (как и датчик скорости) также всегда присутствует в сервосистеме, он может быть реализован как на базе встроенного в привод сервоконтроллера, так и внешнего.
Контур положения используется для точного позиционирования (например, осей подач в станках с ЧПУ).
Если в кинематических связях между исполнительным органом (координатным столом) и валом двигателя нет люфтов,
то координата косвенно пересчитывается по значению кругового датчика. Если люфты есть, то на исполнительный орган
устанавливается дополнительный датчик положения (который подключается к сервоконтроллеру) для прямого измерения координаты.
Те есть, в зависимости от конфигурации контуров скорости и положения подбирается соответствующий сервоконтроллер и
сервопривод (не в любом сервоконтроллере можно реализовать контур положения!).
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
- Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
- Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
- Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.

Типы серводвигателей
- Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
- Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
- Прямой привод (Direct Drive)
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) — синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.

Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Приводы и двигатели постоянного тока
Электродвигатели
Устройство сервомотора
Сервомоторы (серводвигатели) представляют собой специализированные электродвигатели, оснащенные так называемой отрицательной обратной связью, с помощью которой осуществляется точное управление всеми параметрами движения. Ее суть состоит в том, что в процессе работы этих устройств происходит постоянное сравнение выходных параметров функционирования с изначально заданными входными. Происходит это на основе управляющих сигналов, генерируемых в режиме реального времени сервоконтроллерами, имеющими в своей конструкции энкодеры, то есть датчики обратной связи.
Ее суть состоит в том, что в процессе работы этих устройств происходит постоянное сравнение выходных параметров функционирования с изначально заданными входными. Происходит это на основе управляющих сигналов, генерируемых в режиме реального времени сервоконтроллерами, имеющими в своей конструкции энкодеры, то есть датчики обратной связи.
Таким образом, в конструкцию всех современных сервомоторов входит собственно электродвигатель и управляющий блок. В совокупности они представляют собой сервоприводы, с помощью которых конструкторам технических устройств удается решать целый ряд важных задач. Наиболее часто серводвигатели (сервоприводы) применяются в тех случаях, когда требуется в автоматическом режиме осуществлять точное позиционирование одних рабочих элементов конструкции разнообразного оборудования (например, станков с числовым программным управлением, прессо-штамповочного оборудования, роботизированных сборочных конвейеров и т. п.) относительно других.
Все выпускаемые ведущими мировыми производителями серводвигатели можно разделить на две большие группы: со щетками и без щеток. В сервоприводах могут использоваться как синхронные, так и асинхронные электродвигатели, а также синхронные линейные двигатели. Кроме того, в сервоприводах могут использоваться как корпусные, так и бескорпусные электродвигатели, причем во втором варианте исполнения роль корпуса играет пакет пластин статора, что позволяет максимально эффективно использовать весь их профиль, и при этом существенно уменьшить размеры и вес устройств в целом.
В сервоприводах могут использоваться как синхронные, так и асинхронные электродвигатели, а также синхронные линейные двигатели. Кроме того, в сервоприводах могут использоваться как корпусные, так и бескорпусные электродвигатели, причем во втором варианте исполнения роль корпуса играет пакет пластин статора, что позволяет максимально эффективно использовать весь их профиль, и при этом существенно уменьшить размеры и вес устройств в целом.
Большинство современных серводвигателей, работающих по принципу обратной связи, управляется сигналами, сформированными энкодером из нескольких системных. Одной из основных особенностей сервосистем является то, что они способны усиливать выходные сигналы, которые изначально, как правило, имеют гораздо меньшую мощность, чем входные (это необходимо для того, чтобы их можно было сравнить). Таким образом, при работе сервосистем их контуры в прямом направлении передают энергию, а в обратном – информацию, требуемую для точного управления.
Основными техническими характеристиками сервомоторов являются их динамика, равномерность движения и энергоэффективность. В последние годы все более широкое применение находят синхронные серводвигатели, которые выгодно отличаются от асинхронных более высокой динамикой, возможностью длительной работы на низких скоростях без принудительного охлаждения и более высокой устойчивостью к перегрузкам. В то же самое время асинхронные двигатели, используемые в сервоприводах, имеют перед синхронными двигателями такое преимущество, как полное отсутствие пульсации при вращении.
В последние годы все более широкое применение находят синхронные серводвигатели, которые выгодно отличаются от асинхронных более высокой динамикой, возможностью длительной работы на низких скоростях без принудительного охлаждения и более высокой устойчивостью к перегрузкам. В то же самое время асинхронные двигатели, используемые в сервоприводах, имеют перед синхронными двигателями такое преимущество, как полное отсутствие пульсации при вращении.
Сервомоторы, выпускаемые ведущими мировыми производителями, удачно сочетают в себе компактность и высокую мощность. Кроме того, они отличаются большой надежностью, отказоустойчивостью, легкостью и простотой в обслуживании.
Сервопривод что такое и принцип работы
Сервопривод — сервомотор является электродвигателем, который осуществляет работу, основанную на принципе обратной связи. От ротора двигателя вращение через редуктор передается к управляющему механизму, обратная связь осуществляется управляющим блоком, который связан с датчиком, контролирующим угол поворота.
Сервомоторами пользуются в автомобилях, чтобы обеспечить линейное и угловое перемещение элементов, к точному положению которых предъявляются высокие требования. Принцип работы сервопривода основан на корректировки работы электродвигателя, чтобы исполнить управляющий сигнал.
Сервопривод что такое и принцип работы
Сервопривод — состав и назначение
Если управляющим сигналом задается угол, с которым поворачивается выходной вал мотора, он преобразуется в подаваемое напряжение. Для обратной связи используют датчик, измеряющий одну из выходных характеристик мотора. Показания, собираемые датчиком обрабатывается блоком управления, затем корректируется работа серводвигателя.
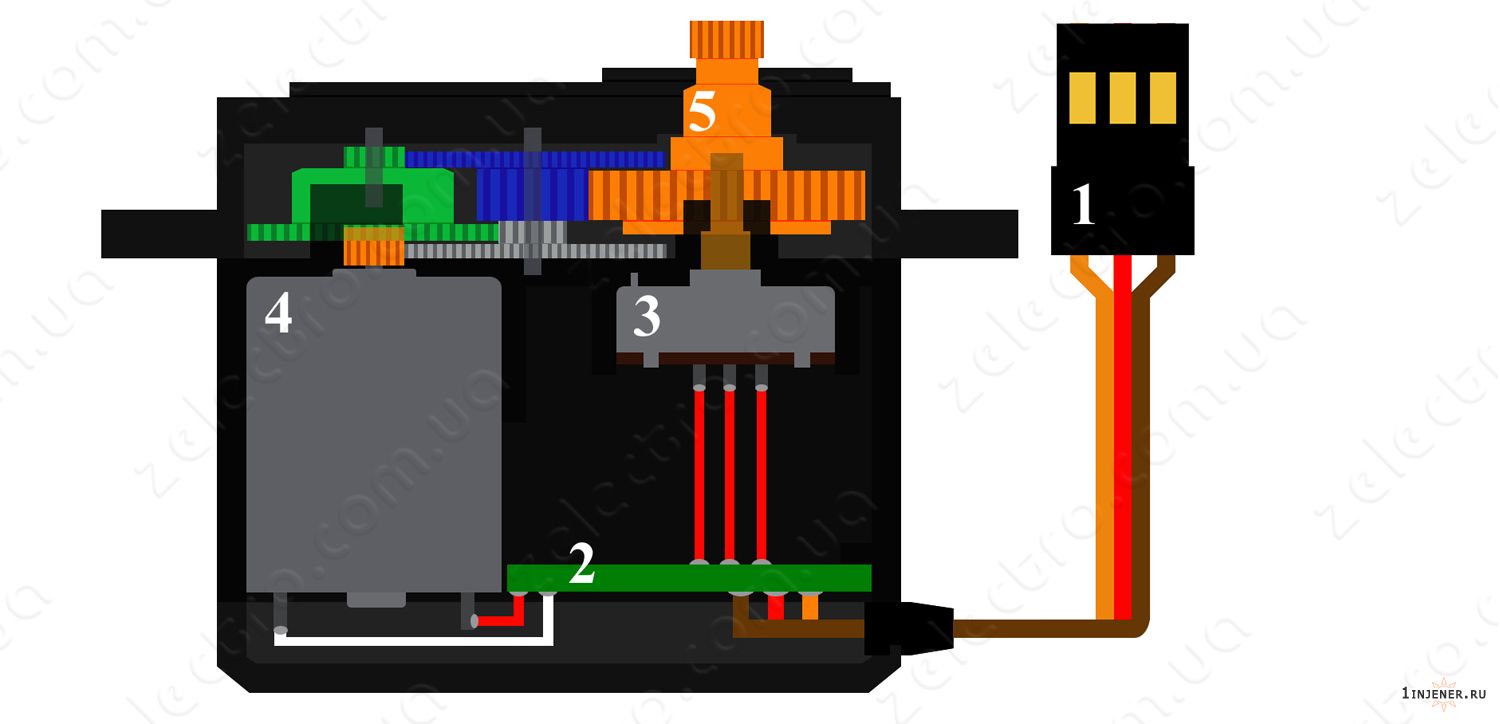
Конструкция сервопривода состоит из электромеханического узла, элементы которого располагаются внутри одного корпуса. Сервопривод включает редуктор, электродвигатель, блок управления и датчик.
Основные характеристики сервопривода это рабочее напряжение питания, крутящий момент, частота вращения, материалы и конструктивные, используемый в конкретной модели.
Сервопривод — конструктивные и рабочие особенности
На современных сервоприводах пользуются двумя типами электромоторов с полым ротором и сердечником. Моторы с сердечником располагают ротором с обмоткой, и магнитами постоянного тока размещенными вокруг. Особенность этих электромоторов заключается в возникновении вибраций при вращении маятника, что приводит к снижению точности угловых перемещений.
Моторы, имеющие полый ротор не обладают таким недостатком, но являются более дорогими из-за сложной технологии производства.
Редукторы сервоприводов нужны чтоб понижать частоту вращения и увеличивать крутящий момент выводного вала. Многие редукторы сервоприводов включают цилиндрическую зубчатую передачу, шестерни, изготовленные из полимерных материалов и металла. Для металлических редукторов характерна высокая стоимость, но при этом отличаются прочностью и долговечностью.
В зависимости от того какая требуется точность работы в сервоприводах могут использоваться пластиковые втулки или шарикоподшипники чтобы выставлять выходной вал по отношению к корпусу.
Сервопривод также различается типом используемого управляющего блока, которые бывают аналоговыми и цифровыми. Цифровыми блоками обеспечивается более точное позиционирование основного элемента сервопривода и большая скорость реакции.
Понравилась статья? Поделись с друзьями в соц.сетях! Серводвигатель: основы, принцип работы и теория
Что такое серводвигатель? Серводвигатель — это тип двигателя, который может вращаться с большой точностью. Обычно этот тип двигателя состоит из схемы управления, которая обеспечивает обратную связь по текущему положению вала двигателя, эта обратная связь позволяет серводвигателям вращаться с большой точностью. Если вы хотите повернуть объект на определенные углы или на определенное расстояние, вы используете серводвигатель. Он просто состоит из простого двигателя, который работает через сервомеханизм .Если двигатель питается от источника постоянного тока, он называется серводвигателем постоянного тока, а если это двигатель переменного тока, то он называется серводвигателем переменного тока. В этом руководстве мы будем обсуждать только серводвигатель постоянного тока , работающий . Помимо этих основных классификаций, существует множество других типов серводвигателей в зависимости от типа редуктора и рабочих характеристик. Серводвигатель обычно поставляется с редуктором, который позволяет нам получить серводвигатель с очень высоким крутящим моментом в небольших и легких корпусах.Благодаря этим характеристикам они используются во многих приложениях, таких как игрушечные автомобили, вертолеты и самолеты с дистанционным управлением, робототехника и т. Д.
В этом руководстве мы будем обсуждать только серводвигатель постоянного тока , работающий . Помимо этих основных классификаций, существует множество других типов серводвигателей в зависимости от типа редуктора и рабочих характеристик. Серводвигатель обычно поставляется с редуктором, который позволяет нам получить серводвигатель с очень высоким крутящим моментом в небольших и легких корпусах.Благодаря этим характеристикам они используются во многих приложениях, таких как игрушечные автомобили, вертолеты и самолеты с дистанционным управлением, робототехника и т. Д.
рассчитаны на кг / см (килограмм на сантиметр), большинство серводвигателей для любительских автомобилей рассчитаны на 3 кг / см, 6 кг / см или 12 кг / см. Этот кг / см показывает, какой вес ваш серводвигатель может поднять на определенное расстояние. Например: серводвигатель 6 кг / см должен быть в состоянии поднять 6 кг, если груз подвешен на расстоянии 1 см от вала двигателя. Чем больше расстояние, тем меньше грузоподъемность. Положение серводвигателя определяется электрическим импульсом, а его электрическая схема размещается рядом с двигателем.
Положение серводвигателя определяется электрическим импульсом, а его электрическая схема размещается рядом с двигателем.
Состоит из трех частей:
- Управляемое устройство
- Выходной датчик
- Система обратной связи
Это замкнутая система, в которой используется система положительной обратной связи для управления движением и конечным положением вала. Здесь устройство управляется сигналом обратной связи, генерируемым путем сравнения выходного сигнала и опорного входного сигнала.
Здесь опорный входной сигнал сравнивается с опорным выходным сигналом, а третий сигнал вырабатывается системой обратной связи. И этот третий сигнал действует как входной сигнал для управления устройством. Этот сигнал присутствует, пока генерируется сигнал обратной связи или существует разница между опорным входным сигналом и опорным выходным сигналом. Таким образом, основная задача сервомеханизма — поддерживать выходной сигнал системы на желаемом уровне при наличии шумов.
Сервопривод состоит из двигателя (постоянного или переменного тока), потенциометра, редуктора и цепи управления. Прежде всего, мы используем редуктор для снижения оборотов и увеличения крутящего момента двигателя. Скажем, в исходном положении вала серводвигателя положение ручки потенциометра таково, что на выходном порте потенциометра не генерируется электрический сигнал. Теперь электрический сигнал подается на другой вход усилителя детектора ошибок.Теперь разница между этими двумя сигналами, один исходит от потенциометра, а другой исходит от других источников, будет обработана в механизме обратной связи, и на выходе будет предоставлен сигнал ошибки. Этот сигнал ошибки действует как вход для двигателя, и двигатель начинает вращаться. Теперь вал двигателя соединен с потенциометром, и когда двигатель вращается, потенциометр и он будут генерировать сигнал. Поэтому при изменении углового положения потенциометра изменяется его выходной сигнал обратной связи. Через некоторое время положение потенциометра достигнет положения, при котором выходной сигнал потенциометра будет таким же, как и внешний сигнал. В этом состоянии выходной сигнал от усилителя на вход двигателя не поступает, поскольку нет разницы между внешним поданным сигналом и сигналом, генерируемым на потенциометре, и в этой ситуации двигатель перестает вращаться.
Через некоторое время положение потенциометра достигнет положения, при котором выходной сигнал потенциометра будет таким же, как и внешний сигнал. В этом состоянии выходной сигнал от усилителя на вход двигателя не поступает, поскольку нет разницы между внешним поданным сигналом и сигналом, генерируемым на потенциометре, и в этой ситуации двигатель перестает вращаться.
Подключение серводвигателей к микроконтроллерам:
Подключить хобби серводвигатели, такие как серводвигатель s90, к MCU очень просто. Сервоприводы имеют три выхода из них . Два из них будут использоваться для питания (положительный и отрицательный), а один будет использоваться для сигнала, который должен быть отправлен от MCU. Серводвигатель MG995 с металлической шестерней , который чаще всего используется для гуманоидных роботов радиоуправляемых машин и т. Д. Изображение MG995 показано ниже:
Цветовая кодировка вашего серводвигателя может отличаться, поэтому проверьте соответствующее техническое описание.
Все серводвигатели работают напрямую с вашими шинами питания +5 В, но мы должны быть осторожны с величиной тока, потребляемого двигателем, если вы планируете использовать более двух серводвигателей, необходимо спроектировать надлежащий сервозащитный экран.
Управляющий серводвигатель:У всех двигателей три выходящих провода. Два из них будут использоваться для питания (положительный и отрицательный), а один будет использоваться для сигнала, который должен быть отправлен от MCU.
Сервомотор управляется ШИМ (импульс с модуляцией), который обеспечивается проводами управления. Есть минимальный импульс, максимальный пульс и частота повторения. Серводвигатель может поворачиваться на 90 градусов в любом направлении из нейтрального положения.Серводвигатель ожидает увидеть импульс каждые 20 миллисекунд (мс), и длина импульса будет определять, насколько далеко двигатель вращается. Например, импульс 1,5 мс заставит двигатель повернуться в положение 90 °, например, если импульс короче 1,5 мс, вал перемещается на 0 °, а если он длиннее 1,5 мс, то сервопривод повернется на 180 °.
работает по принципу PWM (широтно-импульсная модуляция). означает, что его угол поворота контролируется длительностью импульса, подаваемого на его контрольный PIN-код.В основном серводвигатель состоит из двигателя постоянного тока , который управляется переменным резистором (потенциометром) и некоторыми шестернями . Сила высокой скорости двигателя постоянного тока преобразуется в крутящий момент с помощью шестерен. Мы знаем, что РАБОТА = СИЛА X РАССТОЯНИЕ, в двигателе постоянного тока сила меньше, а расстояние (скорость) высокое, а в сервоприводе сила высокая, а расстояние меньше. Потенциометр подключен к выходному валу сервопривода, чтобы вычислить угол и остановить двигатель постоянного тока на требуемом угле.
Серводвигатель можно поворачивать от 0 до 180 градусов, но он может поворачиваться до 210 градусов, в зависимости от производства.Этой степенью вращения можно управлять, применяя Electrical Pulse соответствующей ширины к его контрольному выводу. Сервопривод проверяет пульс каждые 20 миллисекунд. Импульс шириной 1 мс (1 миллисекунда) может повернуть сервопривод на 0 градусов, 1,5 мс может повернуть на 90 градусов (нейтральное положение), а импульс 2 мс может повернуть его на 180 градусов.
Сервопривод проверяет пульс каждые 20 миллисекунд. Импульс шириной 1 мс (1 миллисекунда) может повернуть сервопривод на 0 градусов, 1,5 мс может повернуть на 90 градусов (нейтральное положение), а импульс 2 мс может повернуть его на 180 градусов.
Все серводвигатели работают напрямую с вашими шинами питания +5 В, но мы должны быть осторожны с величиной тока, потребляемого двигателем, если вы планируете использовать более двух серводвигателей, необходимо спроектировать надлежащий сервозащитный экран.
Чтобы узнать больше о принципе работы серводвигателя и его практическом использовании, ознакомьтесь с приведенными ниже приложениями, в которых управление серводвигателем объясняется на примерах:
Как работают серводвигатели | Kollmorgen
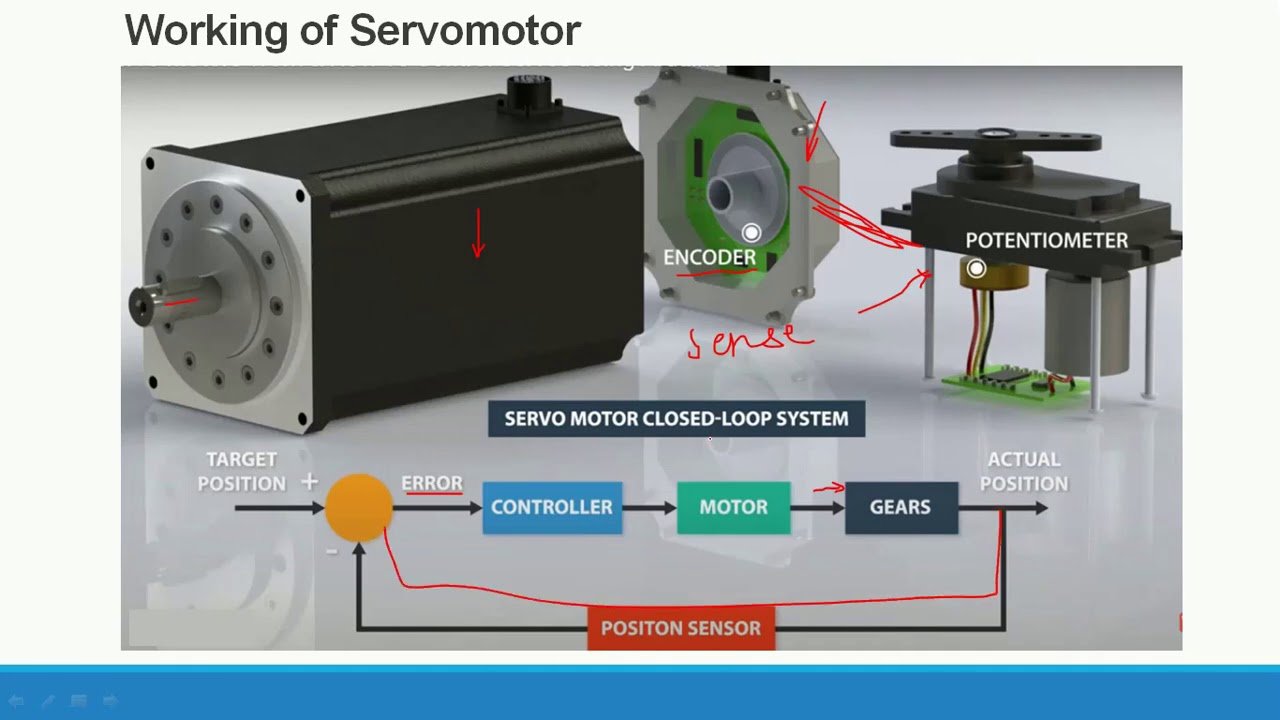
Как работает серводвигатель? Серводвигатель — это электромеханическое устройство, которое создает крутящий момент и скорость в зависимости от подаваемого тока и напряжения. Серводвигатель работает как часть системы с замкнутым контуром, обеспечивая крутящий момент и скорость по команде от сервоконтроллера, использующего устройство обратной связи для замыкания контура. Устройство обратной связи передает такую информацию, как ток, скорость или положение, сервоконтроллеру, который регулирует работу двигателя в зависимости от заданных параметров.
Устройство обратной связи передает такую информацию, как ток, скорость или положение, сервоконтроллеру, который регулирует работу двигателя в зависимости от заданных параметров.
доступны во множестве типов, форм и размеров. Термин сервопривод был впервые использован в 1859 году Джозефом Факортом, который реализовал механизм обратной связи, чтобы помочь управлять кораблем с помощью пара для управления рулями. Серводвигатель — это часть сервомеханизма, состоящего из трех ключевых элементов — двигателя, устройства обратной связи и управляющей электроники.Двигатель может быть переменного или постоянного тока, щеточный или бесщеточный, вращающийся или линейный, любого размера. Устройство обратной связи может быть потенциометром, устройством на эффекте Холла, тахометром, резольвером, энкодером, линейным преобразователем или любым другим датчиком, если это необходимо. Завершением сервосистемы является управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и задание команд, чтобы убедиться, что серводвигатель работает в соответствии с командой. Существует много типов приложений для серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, используемых в многоосных обрабатывающих центрах.Одним из примеров обычного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с установленной скоростью. Если автомобиль замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемой уставки — это простая система с замкнутым контуром.
Существует много типов приложений для серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, используемых в многоосных обрабатывающих центрах.Одним из примеров обычного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с установленной скоростью. Если автомобиль замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемой уставки — это простая система с замкнутым контуром.
Простой промышленный серводвигатель состоит из двигателя постоянного тока с постоянными магнитами и встроенного тахометра, который обеспечивает выходное напряжение, пропорциональное скорости.Электроника привода подает на двигатель необходимое напряжение и ток в зависимости от напряжения, подаваемого с тахометра. В этом примере заданная скорость (представленная как командное опорное напряжение) устанавливается в драйвере, затем схема в драйвере сравнивает напряжение обратной связи тахометра и определяет, достигнута ли желаемая скорость — известная как замкнутый контур скорости. Контур скорости отслеживает заданную скорость и обратную связь тахометра, в то время как водитель регулирует мощность двигателя, чтобы поддерживать желаемую заданную скорость.
В этом примере заданная скорость (представленная как командное опорное напряжение) устанавливается в драйвере, затем схема в драйвере сравнивает напряжение обратной связи тахометра и определяет, достигнута ли желаемая скорость — известная как замкнутый контур скорости. Контур скорости отслеживает заданную скорость и обратную связь тахометра, в то время как водитель регулирует мощность двигателя, чтобы поддерживать желаемую заданную скорость.
В более сложной системе серводвигателя несколько встроенных контуров настроены для оптимальной производительности и обеспечения точного управления движением. Система состоит из контуров тока, скорости и положения, в которых используются прецизионные элементы обратной связи. Каждый цикл сигнализирует о следующем цикле и отслеживает соответствующие элементы обратной связи, чтобы в реальном времени вносить поправки в соответствие с заданными параметрами.
Базовый контур — это контур тока или момента. Ток пропорционален крутящему моменту во вращающемся двигателе (или силе в линейном двигателе), который обеспечивает ускорение или тягу. Датчик тока — это устройство, обеспечивающее обратную связь, связанную с током, протекающим через двигатель. Датчик отправляет сигнал обратно в управляющую электронику — обычно аналоговый или цифровой сигнал, пропорциональный току двигателя. Этот сигнал вычитается из управляемого сигнала. Когда серводвигатель находится на заданном токе, контур будет удовлетворен до тех пор, пока ток не упадет ниже заданного тока. Затем цикл будет увеличивать ток до тех пор, пока не будет достигнут заданный ток, при этом цикл будет продолжаться с частотой обновления менее секунды.
Датчик тока — это устройство, обеспечивающее обратную связь, связанную с током, протекающим через двигатель. Датчик отправляет сигнал обратно в управляющую электронику — обычно аналоговый или цифровой сигнал, пропорциональный току двигателя. Этот сигнал вычитается из управляемого сигнала. Когда серводвигатель находится на заданном токе, контур будет удовлетворен до тех пор, пока ток не упадет ниже заданного тока. Затем цикл будет увеличивать ток до тех пор, пока не будет достигнут заданный ток, при этом цикл будет продолжаться с частотой обновления менее секунды.
Контур скорости работает таким же образом с напряжением, пропорциональным скорости. Контур скорости отправляет токовому контуру команду на увеличение тока (тем самым увеличивая напряжение), когда скорость падает ниже заданной скорости.
Контур положения принимает команду для ПЛК или контроллера движения, который, в свою очередь, обеспечивает команду скорости, которая подается в контур скорости, который, в свою очередь, дает команду на требуемый ток для ускорения, поддержания и замедления двигателя, чтобы он переместился в заданное должность. Все три контура работают оптимизированно синхронно, чтобы обеспечить плавное и точное управление сервомеханизмом.
Все три контура работают оптимизированно синхронно, чтобы обеспечить плавное и точное управление сервомеханизмом.
Как работает серводвигатель?
Серводвигатели — это двигатели, специально разработанные для использования в системах управления и робототехнике. Они используются для точного управления положением и скоростью при высоких крутящих моментах. Он состоит из подходящего двигателя, датчика положения и сложного контроллера. Серводвигатели можно охарактеризовать по двигателю, управляемому сервомеханизмом, т.е.если двигатель постоянного тока управляется с помощью сервомеханизма, он называется серводвигателем постоянного тока. Таким образом, основными типами серводвигателя могут быть — (i) серводвигатель постоянного тока, (ii) серводвигатель переменного тока.Серводвигатели доступны с номинальной мощностью от долей до нескольких 100 Вт. У них высокий крутящий момент. Ротор серводвигателя выполнен меньшего диаметра и более длинной по длине, так что он имеет меньшую инерцию.

Что такое сервомеханизм?
Сервомеханизм — это в основном замкнутая система, состоящая из управляемого устройства, контроллера, выходного датчика и системы обратной связи.Термин сервомеханизм, скорее всего, относится к системам, в которых необходимо управлять положением и скоростью.
Как работает серводвигатель?
Серводвигатели используются для очень точного управления положением и скоростью , но в простом случае можно управлять только положением. Механическое положение вала можно определить с помощью потенциометра, который соединен с валом двигателя через шестерни. Текущее положение вала преобразуется в электрический сигнал потенциометром и сравнивается с командным входным сигналом.В современных серводвигателях для определения положения вала используются электронные энкодеры или датчики. Ввод команды осуществляется в соответствии с требуемым положением вала. Если сигнал обратной связи отличается от заданного входа, генерируется сигнал ошибки. Этот сигнал ошибки затем усиливается и подается на вход двигателя, который заставляет двигатель вращаться. И когда вал достигает требуемого положения, сигнал ошибки становится нулевым, и, следовательно, двигатель остается в неподвижном состоянии, удерживая положение.
Этот сигнал ошибки затем усиливается и подается на вход двигателя, который заставляет двигатель вращаться. И когда вал достигает требуемого положения, сигнал ошибки становится нулевым, и, следовательно, двигатель остается в неподвижном состоянии, удерживая положение.
Командный ввод осуществляется в виде электрических импульсов. Поскольку фактический входной сигнал, подаваемый на двигатель, представляет собой разницу между сигналом обратной связи (текущее положение) и подаваемым сигналом (требуемое положение), скорость двигателя пропорциональна разнице между текущим положением и требуемым положением. Мощность, требуемая двигателем, пропорциональна расстоянию, которое ему необходимо преодолеть.
Как управляется серводвигатель?
Обычно серводвигатель поворачивается на 90 ° в любом направлении, т.е.е. максимальное перемещение может составлять 180 °. Обычный серводвигатель не может вращаться дальше из-за встроенного механического упора.
Из сервопривода выведены три провода: плюсовой, заземляющий и контрольный. Сервомотор управляется путем отправки сигнала с широтно-импульсной модуляцией (ШИМ) через провод управления. Импульс отправляется каждые 20 миллисекунд. Ширина импульсов определяет положение вала. Например, пульс
Сервомотор управляется путем отправки сигнала с широтно-импульсной модуляцией (ШИМ) через провод управления. Импульс отправляется каждые 20 миллисекунд. Ширина импульсов определяет положение вала. Например, пульс 1 мс перемещает вал против часовой стрелки на -90 °, импульс 1,5 мс перемещает вал в нейтральное положение, которое составляет 0 °, а импульс в 2 мс перемещает вал по часовой стрелке на + 90 °.
Когда серводвигатель получает команду двигаться с помощью импульсов соответствующей ширины, вал перемещается в требуемое положение и удерживает его. Если внешняя сила пытается изменить положение вала, двигатель сопротивляется изменению. Чтобы двигатель удерживал свое положение, необходимо повторять импульсы.
Применение серводвигателя
Сервомоторы широко используются в робототехнике, компьютерах, CD / DVD-плеерах, игрушках и т. Д. Сервомоторы широко используются в тех приложениях, где конкретная задача должна выполняться многократно и очень точно.
Сервомоторы— Принцип работы, управление и применение
Сервомоторы подразумевают управление с обратной связью с обнаружением ошибок, которое используется для корректировки производительности системы. Для этого также требуется обычно сложный контроллер, часто специальный модуль, специально разработанный для использования с серводвигателями. Серводвигатели — это двигатели постоянного тока, которые позволяют точно контролировать угловое положение. Это двигатели постоянного тока, скорость которых медленно снижается шестернями. Серводвигатели обычно имеют отсечку оборотов от 90 ° до 180 °.Некоторые серводвигатели также имеют отсечку оборотов на 360 ° или более. Но серводвигатели не вращаются постоянно. Их вращение ограничено фиксированными углами.
Для этого также требуется обычно сложный контроллер, часто специальный модуль, специально разработанный для использования с серводвигателями. Серводвигатели — это двигатели постоянного тока, которые позволяют точно контролировать угловое положение. Это двигатели постоянного тока, скорость которых медленно снижается шестернями. Серводвигатели обычно имеют отсечку оборотов от 90 ° до 180 °.Некоторые серводвигатели также имеют отсечку оборотов на 360 ° или более. Но серводвигатели не вращаются постоянно. Их вращение ограничено фиксированными углами.
Серводвигатель представляет собой сборку из четырех элементов: обычного двигателя постоянного тока, редуктора, устройства определения положения и схемы управления. Двигатель постоянного тока соединен с зубчатым механизмом, который обеспечивает обратную связь с датчиком положения, который в основном представляет собой потенциометр. От коробки передач мощность двигателя через шлицевую часть сервопривода подается на рычаг сервопривода.Для стандартных серводвигателей шестерня обычно сделана из пластика, тогда как для сервоприводов большой мощности шестерня сделана из металла.
Серводвигатель состоит из трех проводов — черного провода, подключенного к земле, бело-желтого провода, подключенного к блоку управления, и красного провода, подключенного к источнику питания.
Функция серводвигателя состоит в том, чтобы получать управляющий сигнал, который представляет желаемое выходное положение вала сервомотора, и подавать питание на его двигатель постоянного тока до тех пор, пока его вал не повернется в это положение.
Он использует устройство определения положения для определения положения вращения вала, поэтому он знает, в какую сторону должен повернуться двигатель, чтобы переместить вал в заданное положение. Вал обычно не вращается свободно, как двигатель постоянного тока, а может просто повернуться на 200 градусов.
Серводвигатель Из положения ротора создается вращающееся магнитное поле для эффективного создания крутящего момента. В обмотке течет ток, создавая вращающееся магнитное поле. Вал передает выходную мощность двигателя.Нагрузка приводится в движение передаточным механизмом. Высокоэффективный редкоземельный или другой постоянный магнит расположен снаружи вала. Оптический энкодер всегда отслеживает количество оборотов и положение вала.
Высокоэффективный редкоземельный или другой постоянный магнит расположен снаружи вала. Оптический энкодер всегда отслеживает количество оборотов и положение вала.
Работа серводвигателя
Серводвигатель состоит из двигателя постоянного тока, зубчатой передачи, датчика положения и цепи управления. Двигатели постоянного тока питаются от батареи и работают с высокой скоростью и низким крутящим моментом. Узел шестерни и вала, соединенный с двигателями постоянного тока, снижает эту скорость до достаточной скорости и более высокого крутящего момента.Датчик положения определяет положение вала из его определенного положения и передает информацию в схему управления. Схема управления соответственно декодирует сигналы от датчика положения и сравнивает фактическое положение двигателей с желаемым положением и, соответственно, управляет направлением вращения двигателя постоянного тока, чтобы получить требуемое положение. Серводвигатель обычно требует питания постоянного тока от 4,8 В до 6 В.
Управление серводвигателем
Серводвигатель управляется путем управления его положением с помощью метода широтно-импульсной модуляции.Ширина импульса, подаваемого на двигатель, варьируется и отправляется в течение фиксированного периода времени.
Ширина импульса определяет угловое положение серводвигателя. Например, ширина импульса 1 мс приводит к угловому положению 0 градусов, тогда как ширина импульса 2 мс вызывает угловую ширину 180 градусов.
Преимущества:
- Если на двигатель оказывается большая нагрузка, драйвер увеличивает ток, подаваемый на катушку двигателя, когда пытается вращать двигатель.Нет никаких отклонений от шага.
- Возможна высокоскоростная работа.
Недостатки:
- Поскольку серводвигатель пытается вращаться в соответствии с командными импульсами, но с запаздыванием, он не подходит для точного управления вращением.
- Более высокая стоимость.
- При остановке ротор двигателя продолжает двигаться вперед и назад на один импульс, поэтому он не подходит для предотвращения вибрации
7 Применения серводвигателей
Серводвигатели используются в приложениях, требующих быстрых изменений скорости без перегрева двигателя.
- В промышленности они используются в станках, упаковке, автоматизации производства, погрузочно-разгрузочных работах, преобразовании печати, сборочных линиях и многих других сложных приложениях в робототехнике, станках с ЧПУ или автоматизированном производстве.
- Они также используются в радиоуправляемых самолетах для управления позиционированием и движением лифтов.
- Они используются в роботах из-за плавного включения и выключения и точного позиционирования.
- Они также используются в аэрокосмической промышленности для поддержания гидравлической жидкости в гидравлических системах.
- Они используются во многих радиоуправляемых игрушках.
- Они используются в электронных устройствах, таких как DVD-диски или проигрыватели Blue-ray Disc, для расширения или воспроизведения лотков для дисков.
- Они также используются в автомобилях для поддержания скорости транспортных средств.
Прикладная схема серводвигателя
Из приведенной ниже прикладной схемы: Каждый двигатель имеет три входа: VCC, заземление и периодический прямоугольный сигнал. Ширина импульса прямоугольной волны определяет скорость и направление серводвигателей.В нашем случае нам просто нужно изменить направление, чтобы устройство могло двигаться вперед, назад и поворачиваться влево и вправо. Если ширина импульса меньше определенного периода времени, двигатель будет вращаться по часовой стрелке. Если ширина импульса превышает этот временной интервал, двигатель будет вращаться против часовой стрелки. Средний временной интервал можно регулировать с помощью встроенного в двигатель потенциометра.
Ширина импульса прямоугольной волны определяет скорость и направление серводвигателей.В нашем случае нам просто нужно изменить направление, чтобы устройство могло двигаться вперед, назад и поворачиваться влево и вправо. Если ширина импульса меньше определенного периода времени, двигатель будет вращаться по часовой стрелке. Если ширина импульса превышает этот временной интервал, двигатель будет вращаться против часовой стрелки. Средний временной интервал можно регулировать с помощью встроенного в двигатель потенциометра.
3 Различия между шаговым двигателем и серводвигателем:
- Шаговые двигатели имеют большое количество полюсов, магнитных пар, генерируемых постоянным магнитом или электрическим током.У серводвигателей очень мало полюсов; каждый полюс обеспечивает естественную точку остановки вала двигателя.
- Крутящий момент шагового двигателя на низких скоростях больше, чем у серводвигателя того же размера.
- Работа шагового двигателя синхронизируется сигналами командных импульсов, выдаваемыми генератором импульсов. Напротив, работа серводвигателя отстает от командных импульсов.
 Напротив, работа серводвигателя отстает от командных импульсов.
Напротив, работа серводвигателя отстает от командных импульсов.Теперь у вас есть представление о работе сервометра, если у вас есть какие-либо вопросы по этой теме или проекты по электротехнике и электронике, оставьте комментарии ниже.
Фото
Как, что и принципы
Некоторые изобретения действительно повлияли на то, как мы используем определенные предметы. Одно из таких изобретений — серводвигатель. К счастью для нас, этот моторчик существует уже довольно давно!
Многие люди не знают о множестве существующих приложений для серводвигателей. В изделиях от принтеров до игрушечных машинок в той или иной форме используются серводвигатели. Серводвигатели в целом более популярны среди клиентов из-за их компактных размеров, быстрого динамического отклика и хорошо контролируемых характеристик.
Хотя есть несколько других типов двигателей, которые следует учитывать, серводвигатели, как правило, являются функцией наиболее распространенных интегрированных двигателей, энергоэффективных, точных и мощных. В более широком масштабе серводвигатели могут широко использоваться в промышленных приложениях и робототехнике.
В более широком масштабе серводвигатели могут широко использоваться в промышленных приложениях и робототехнике.
Давайте обсудим серводвигатель более подробно, чтобы вы могли решить, стоит ли его рассматривать для проектов управления движением или приложений, для которых он вам нужен.
Что такое серводвигатель?Серводвигатель — это механизм с обратной связью по положению для управления вращательной / линейной скоростью и положением.Электрический сигнал управляет двигателем, который регулирует движение, определяя конечное командное положение выходного вала.
Как работает серводвигатель?Вы когда-нибудь брали в руки небольшой серводвигатель и задавались вопросом, как именно он работает? Как такое маленькое изделие может приводить в действие такие простые объекты, как игрушечные машинки, или такие сложные, как военная робототехника?
Что ж, то, как работает сервосистема, на самом деле не так сложно, как вы можете себе представить. Если вы разберетесь в основных компонентах, вы поймете идею.
Если вы разберетесь в основных компонентах, вы поймете идею.
Вот разбивка различных компонентов, составляющих замкнутую систему:
— Электродвигатель : Двигатель генерирует движение через вал.
— Датчик обратной связи : Датчик (энкодер), используемый для передачи информации об угловом / линейном положении, скорости или текущем значении в блок управления.
— Цепь управления : Эта последовательная цепь двигателя обеспечивает управление движением двигателя с помощью электрических импульсов.
— Ведущая шестерня с: шестерни увеличивают или уменьшают скорость и крутящий момент двигателя.
Прежде чем мы объясним процесс работы серводвигателя, важно понять, что такое «замкнутая система». Чтобы упростить, замкнутая система — это полностью автоматизированная система управления, в которой управляющее действие зависит от выхода.
Все просто, мотор крепится к датчику обратной связи. Когда двигатель вращается, датчик выдает информацию обратной связи, которая позволяет схеме управления регулировать величину движения вала и то, в каком направлении он должен двигаться.Когда вал переместился в желаемое положение, это называется командным положением.
Когда двигатель вращается, датчик выдает информацию обратной связи, которая позволяет схеме управления регулировать величину движения вала и то, в каком направлении он должен двигаться.Когда вал переместился в желаемое положение, это называется командным положением.
Как только вал двигателя находится в требуемом положении, мощность двигателя прекращается. Электрические импульсы отправляют требуемое положение по сигнальному проводу. Поскольку скорость двигателя зависит от фактического положения по сравнению с желаемым положением, двигатель будет вращаться медленнее, если он находится ближе к положению, и быстрее, если он находится дальше. Таким образом, двигатель будет работать только настолько быстро, насколько это необходимо для выполнения запрошенной задачи, что делает его очень эффективным.
Для эффективной работы серводвигателя рекомендуется использовать внешний источник питания. Можно легко использовать средний источник питания 12/24 В, аналогичный тем, которые используются для зарядки стандартного сотового телефона.
В серводвигателях большего размера, которые используются в промышленных машинах, используются редукторы для достижения и поддержания правильного крутящего момента на выходе. Большинство сервоприводов работают с передаточным числом 5: 1, 10: 1 или даже 100: 1.
Серводвигателииспользуют электромагнетизм для создания крутящего момента.Постоянные магниты находятся на роторе, а неподвижный электромагнит окружает сам ротор. Поскольку сервопривод представляет собой асинхронный двигатель с векторным приводом, он питается от вращающегося магнитного поля, а не от постоянного магнитного поля.
Серводвигателив первую очередь более мощные, чем их более дешевые аналоги. Благодаря высокой производительности и энергоэффективности они также очень долговечны.
Как управлять серводвигателем?Управление серводвигателем осуществляется путем отправки электрического импульса с гибкой шириной или широтно-импульсной модуляцией (ШИМ) через провод управления.Как правило, сигнал ШИМ будет управляться для вращения двигателя с определенной скоростью, положением или выходным крутящим моментом. В обычных приложениях серводвигатель мог выбрать только одну функцию управления. Но наиболее распространенным и широко используемым типом управления является позиционное управление.
В высокоточных приложениях исходная точка серводвигателя может быть определена с помощью абсолютного энкодера. Управляющая ИС будет посылать соответствующий ток ШИМ на двигатель, который определяет положение вала, и на основе информации обратной связи, предоставленной кодировщиком, ротор, наконец, повернется в требуемое положение.
Серводвигатель постоянного тока от Assun Motor Pte Ltd, например, , использует импульсы для управления положением . Для каждого заданного импульса двигатель будет вращаться на определенный угол. А для непрерывных импульсов серводвигатель будет вращаться в соответствии со скоростью, рассчитанной по частоте импульсов, и скорость может составлять от до 12 000 об / мин .
Пока частота импульсов определена правильно, двигатель может либо вращаться со стабильной скоростью, либо вращаться в соответствии с заранее заданными положениями.Кривая частота-время импульса должна быть плавной, чтобы серводвигатель мог точно определить свое целевое положение.
Когда дело доходит до управления фактической скоростью серводвигателя, вы должны знать, что он обычно не контролируется по скорости. На самом деле вы просто посылаете сервоприводы сигналы непрерывного положения. Сервопривод, в свою очередь, пытается достичь этого положения как можно быстрее. Скорость можно легко уменьшить, посылая серию сигналов положения с более низкой частотой.
КПД серводвигателяИспользуете ли вы двигатель для простого хобби или в более промышленных целях, энергоэффективность — лучший путь.К счастью, серводвигатели очень энергоэффективны. Но что именно делает серводвигатели такими энергоэффективными?
Во-первых, конструкция и изготовление отличаются от шаговых двигателей. Еще одно важное отличие — сила постоянных магнитов. Более сильные магниты могут легко уменьшить длину двигателя на 20%, что одновременно увеличивает крутящий момент как минимум на 50%. Магнитные двигатели обычно имеют гораздо более высокое сопротивление размагничиванию.
Поскольку плотность крутящего момента относится к наиболее рациональному количеству работы, которую двигатель потенциально может выполнить, двигатель с высоким крутящим моментом повысит эффективность серводвигателя.По большей части эффективность находится на кривой. Поскольку кривая крутящего момента используется для регулирования рабочей скорости, увеличение напряжения увеличивает диапазон рабочих скоростей.
Что касается рабочей скорости, серводвигатели могут быть очень эффективными в диапазоне от 40 до 90% крутящего момента при остановке. Проще говоря, серводвигатели должны иметь КПД более 85%. Это, конечно, может быть изменено используемым сервоприложением. Итак, что касается моментных двигателей, сервоприводы определенно лучше.
По сравнению с другими более дешевыми двигателями, сервоприводы производятся путем намотки большего количества проволоки в пластинки.Это означает, что пространство между зубами заполнено. Как правило, более высокое заполнение паза обеспечивает дополнительный крутящий момент с повышенной эффективностью. Подсчитано, что создание двигателя таким образом увеличивает КПД как минимум до 85%.
Для чего используется серводвигатель?Интересно, что серводвигатели могут использоваться в широком диапазоне приложений. Они не только могут работать на высокой скорости, но и энергоэффективны. По этой причине они используются во многих отраслях для самых разных целей.
Некоторые области применения серводвигателей перечислены ниже:
— Промышленный дозатор клея : Серводвигатели широко используются в дозаторах клея в промышленных зонах. Автоматизация производственной линии очень надежна для серводвигателей.
— Промышленное применение : Серводвигатели могут использоваться для управления промышленными ткацкими станками и ткацкими станками. Их также можно использовать в вязальных и вышивальных машинах, которые производят такие материалы, как ткани и ковровые покрытия.
— Печатные машины: Некоторые печатные машины имеют серводвигатели, которые запускают и останавливают печатающие головки непосредственно на носителе печати. Это также механизм, который перемещает головку принтера по бумаге.
— Автоматические открыватели дверей : Больницы и супермаркеты с автоматическими дверьми управляются серводвигателями разных размеров.
— Робототехника : каждое соединение механизма робота может быть активировано серводвигателем. Серводвигатели делают возможным это перемещение.
— Станки с ЧПУ : Деревообрабатывающие станки, такие как токарные станки, которые вырезают из дерева и формуют ножки стола, используют серводвигатель.
— Позиционирование антенны : Серводвигатели могут использоваться на оси привода подъема телескопов, например, используемых NRAO.
— Системы слежения за солнечными батареями : Углы наклона солнечных панелей можно регулировать в течение дня, чтобы каждая панель всегда была обращена к солнцу. Это обеспечивает максимальное поглощение энергии в светлое время суток.
— Роботизированные транспортные средства : серводвигатели могут использоваться в роботизированных транспортных средствах, которые используются для взрыва бомб. Колеса содержат небольшие серводвигатели.
— Автофокус камеры : Камеры имеют очень сложный и точный серводвигатель, встроенный в объектив камеры. Это позволяет повысить резкость и исправить расфокусированные изображения.
— Конвейерные ленты : Во время упаковки продукта серводвигатели перемещают конвейерные ленты, которые транспортируют предметы на различные этапы упаковки и сортировки.
доступны в различных размерах и трех основных типах. Они определены следующим образом:
Непрерывное вращение : Используется для хобби.
Linear : больше подходит для сложных приложений.
Позиционное вращение : Наиболее часто используется в повседневных применениях.
Основное различие между двигателями переменного и постоянного тока относится к электрическим токам и различным способам работы каждого тока в каждом конкретном типе двигателя.Давайте посмотрим на некоторые из основных различий между сервоприводом переменного тока и сервоприводом постоянного тока.
Сервопривод переменного токаДля большинства бытовых и бытовых применений предпочтительным выбором являются серводвигатели переменного тока. Сервоприводы переменного тока имеют переменный ток (AC), который работает в обратном порядке. Трансформаторное устройство или источник питания перемещают переменный ток на огромные расстояния под высоким напряжением. Серводвигатель переменного тока может облегчить изменение напряжения с большим комфортом, чем серводвигатель постоянного тока.
Сервоприводыпеременного тока можно разделить на два варианта: синхронные серводвигатели и асинхронные двигатели.Как правило, в синхронных серводвигателях скорость ротора зависит от статора. Это означает, что они вращаются синхронно друг с другом. Элементы, которые обычно содержат синхронные сервоприводы переменного тока, включают контроллеры скорости, заводских роботов и даже будильники.
Сервопривод постоянного тока Серводвигателипостоянного тока содержат постоянный ток (DC) как с положительным, так и с отрицательным током. В отличие от сервоприводов переменного тока, ток течет точно в том же направлении. Управление током намного проще, чем у серводвигателя переменного тока, потому что только величина якоря управляет током.
Двигатели постоянного токатакже известны как бесщеточные серводвигатели, потому что у них нет щеток. Контроллеры подают импульсы тока на обмотки двигателя, которые, в свою очередь, регулируют скорость и крутящий момент двигателя.
СерводвигателиAssun относятся к типу двигателей постоянного тока, вы можете поговорить с нашим дружелюбным персоналом о наших серводвигателях постоянного тока.
Преимущества серводвигателейПоскольку серводвигатели настолько энергоэффективны и рассчитаны на питание, они используются во многих различных отраслях промышленности.Есть также несколько других преимуществ использования серводвигателя для ваших проектов управления движением.
Некоторые из этих преимуществ включают следующее:
— Управление крутящим моментом
— Маленький размер
— Плавный ход
— Высокая эффективность
— Высокая выходная мощность по сравнению с размером
— Добавлен постоянный крутящий момент на большей скорости
— Управление с обратной связью
— Тихая работа
— Очень надежная
— Высокий коэффициент инерции крутящего момента
— Исключительная точность благодаря энкодеру
— Высокая скорость
— Хорошо подходит для приложений с изменяющейся нагрузкой
— Высокое ускорение
— Работа без вибрации
Нужны ли серводвигатели в драйверах?
Еще один плюс серводвигателей в том, что для большинства из них не требуются дополнительные драйверы.У них есть собственная приводная электроника, и для управления ими требуется только сигнал ШИМ. Это означает, что сервоприводы, а также управление серводвигателем, управляют работой в замкнутой системе.
Сервоприводы или контроллеры движения используются для запуска контура управления. Система с обратной связью также использует сигнал обратной связи для изменения направления и скорости двигателя для достижения требуемого результата. Контуры управления движением для крутящего момента, скорости и положения. Они функционируют независимо для выполнения желаемой операции.
Сервоприводы могут управлять более чем одним или даже группой серводвигателей. Часто для выполнения определенной задачи в проекте требуется несколько серводвигателей. Контроллер должен будет управлять более чем одним сервоприводом. Самолет RC — прекрасный тому пример.
Серводвигатель аналоговый или цифровой?
Аналоговые и цифровые двигатели ничем не отличаются. Основное различие между этими двумя типами — способ обработки сигнала.
Давайте проанализируем эти два случая более подробно:
— Аналоговый: аналоговый сервопривод обычно имеет приводы, которые управляют базовой аналоговой схемой управления.Эти приводы используются как в щеточных, так и в бесщеточных двигателях постоянного тока. В качестве управляющего входа используется традиционный сигнал +/- 10 В. Аналоговый также является стандартным типом сервопривода и управляет скоростью двигателя, посылая импульсы включения и выключения. Через аналоговый серводвигатель посылается минимум 50 импульсов. Однако, когда устройство выключено или находится в состоянии покоя, через него не проходит напряжение.
— Цифровой: небольшие микропроцессоры используются для приема и отправки требуемых действий при импульсах высокого напряжения. Отправляется почти в шесть раз больше импульсов, чем у аналогового.Чем быстрее пульс, тем стабильнее крутящий момент. В конечном итоге это приводит к более быстрому и плавному отклику.
Заключение
Итак, серводвигатели используются во многих отраслях промышленности и имеют ряд преимуществ. Они обеспечивают решение многих механических проблем и обладают функциями, которые делают их мощными и эффективными.
Как видно из нашей статьи, их можно использовать в чем угодно, от игрушечных машинок до высокоразвитой сложной робототехники.Это идеальный двигатель для ваших проектов по управлению движением, а поскольку он очень энергоэффективен, вы также сэкономите на счетах за электроэнергию!
Если у вас есть какие-либо вопросы о наших серводвигателях, свяжитесь с нами.
Серводвигатель— Типы и принцип работы
Серводвигатель — один из широко используемых приводов с регулируемой скоростью в промышленном производстве, автоматизации процессов и строительной техники во всем мире.
Хотя серводвигатели не относятся к определенному классу двигателей, они предназначены и предназначены для использования в приложениях управления движением, требующих высокой точности позиционирования, быстрого реверсирования и исключительной производительности.
СервомоторыОни широко используются в робототехнике, радиолокационных системах, автоматизированных производственных системах, станках, компьютерах, станках с ЧПУ, системах слежения и т. Д.
Что такое сервомоторы?
Серводвигатель — это линейный или поворотный привод, который обеспечивает быстрое прецизионное управление положением для приложений управления положением с обратной связью. В отличие от больших промышленных двигателей, серводвигатель не используется для непрерывного преобразования энергии.
Серводвигатели обладают высокой скоростью отклика из-за низкой инерции и имеют малый диаметр и большую длину ротора.Тогда как же работают серводвигатели?
Серводвигатели работают на сервомеханизме, который использует обратную связь по положению для управления скоростью и конечным положением двигателя. Внутри серводвигатель объединяет двигатель, цепь обратной связи, контроллер и другую электронную схему.
СерводвигателиОн использует энкодер или датчик скорости для обеспечения обратной связи по скорости и положению. Этот сигнал обратной связи сравнивается с положением входной команды (желаемое положение двигателя, соответствующее нагрузке) и выдает сигнал ошибки (если между ними существует разница).
Сигнала ошибки на выходе детектора ошибки недостаточно для привода двигателя. Таким образом, детектор ошибок, за которым следует сервоусилитель, повышает уровень напряжения и мощности сигнала ошибки, а затем поворачивает вал двигателя в желаемое положение.
Типы серводвигателей
В основном серводвигатели подразделяются на серводвигатели переменного и постоянного тока в зависимости от характера источника питания, используемого для их работы. Серводвигатели постоянного тока с щеточными постоянными магнитами используются для простых применений из-за их стоимости, эффективности и простоты.
Они лучше всего подходят для небольших приложений. С развитием микропроцессоров и силовых транзисторов серводвигатели переменного тока используются все чаще из-за их высокой точности управления.
Серводвигатели постоянного тока
Серводвигатель постоянного тока состоит из небольшого двигателя постоянного тока, потенциометра обратной связи, коробки передач, электронной схемы привода двигателя и электронного контура управления с обратной связью. Он более или менее похож на обычный двигатель постоянного тока.
Статор двигателя состоит из цилиндрической рамы, а магнит прикреплен к внутренней части рамы.
Серводвигатель постоянного токаРотор состоит из щетки и вала. Коллектор и металлическая опорная рама ротора прикреплены к внешней стороне вала, а обмотка якоря намотана на металлическую опорную раму ротора.
Щетка состоит из катушки якоря, которая подает ток на коммутатор. В задней части вала в ротор встроен датчик для определения скорости вращения.
С такой конструкцией легко спроектировать контроллер, используя простую схему, потому что крутящий момент пропорционален величине тока, протекающего через якорь.
А также мгновенная полярность управляющего напряжения определяет направление крутящего момента, развиваемого двигателем. Типы серводвигателей постоянного тока включают в себя последовательные двигатели, двигатели с параллельным управлением, двигатели с разделенным последовательным подключением и параллельные двигатели с постоянными магнитами.
Принцип работы серводвигателя постоянного тока
Серводвигатель постоянного тока представляет собой сборку из четырех основных компонентов, а именно двигателя постоянного тока, устройства определения положения, узла редуктора и цепи управления. На рисунке ниже показаны части, которые состоят в серводвигателях RC, в которых используется небольшой двигатель постоянного тока для привода нагрузок с точной скоростью и положением.
Внутренняя схемаОпорное напряжение постоянного тока установлено на значение, соответствующее желаемому выходу. Это напряжение может подаваться с помощью другого потенциометра, преобразователя ширины управляющего импульса в напряжение или через таймеры в зависимости от схемы управления.
Диск потенциометра создает соответствующее напряжение, которое затем подается на один из входов усилителя ошибки.
В некоторых схемах управляющий импульс используется для создания опорного напряжения постоянного тока, соответствующего желаемому положению или скорости двигателя, и подается на преобразователь ширины импульса в напряжение.
В этом преобразователе конденсатор начинает заряжаться с постоянной скоростью при высоком уровне импульса. Затем заряд конденсатора подается на буферный усилитель, когда импульс низкий, и этот заряд далее подается на усилитель ошибки.
Таким образом, длина импульса определяет напряжение, приложенное к усилителю ошибки, как желаемое напряжение для получения желаемой скорости или положения.
В цифровом управлении микропроцессор или микроконтроллер используются для генерации плюсов ШИМ с точки зрения рабочих циклов для получения более точных управляющих сигналов.
Сигнал обратной связи, соответствующий текущему положению груза, получается с помощью датчика положения. Этот датчик обычно представляет собой потенциометр, который выдает напряжение, соответствующее абсолютному углу вала двигателя через зубчатый механизм. Затем значение напряжения обратной связи подается на вход усилителя ошибки (компаратора).
Усилитель ошибки — это усилитель с отрицательной обратной связью, который уменьшает разницу между его входами. Он сравнивает напряжение, относящееся к текущему положению двигателя (полученное с помощью потенциометра), с желаемым напряжением, относящимся к желаемому положению двигателя (полученное с помощью преобразователя ширины импульса в напряжение), и выдает ошибку либо положительное, либо отрицательное напряжение.
Это напряжение ошибки подается на якорь двигателя. Если ошибка больше, то на якорь двигателя подается больший выходной сигнал.
Пока существует ошибка, усилитель усиливает напряжение ошибки и, соответственно, запитывает якорь. Двигатель вращается, пока ошибка не станет равной нулю. Если ошибка отрицательная, напряжение якоря меняется на противоположное, и, следовательно, якорь вращается в противоположном направлении.
Серводвигатели переменного тока
Серводвигатели переменного тока в основном представляют собой двухфазные асинхронные двигатели с короткозамкнутым ротором и используются в системах с малой мощностью.В настоящее время трехфазные асинхронные двигатели с короткозамкнутым ротором модифицированы таким образом, что их можно использовать в сервосистемах большой мощности.
Основное различие между стандартным асинхронным двигателем с расщепленной фазой и двигателем переменного тока состоит в том, что ротор серводвигателя с короткозамкнутым ротором сделан с более тонкими проводящими шинами, поэтому сопротивление двигателя выше. Серводвигатель переменного тока
В зависимости от конструкции существует два различных типа серводвигателей переменного тока: это синхронный серводвигатель переменного тока и асинхронный серводвигатель переменного тока.
Синхронный серводвигатель переменного тока состоит из статора и ротора. Статор состоит из цилиндрической рамы и сердечника статора. Катушка якоря намотана вокруг сердечника статора, и конец катушки соединен с подводящим проводом, по которому ток подается на двигатель.
Ротор состоит из постоянного магнита и, следовательно, они не зависят от ротора индукционного типа переменного тока, в котором наведен ток. И поэтому их также называют бесщеточными серводвигателями из-за конструктивных характеристик.
Синхронный серводвигатель переменного токаКогда поле статора возбуждено, ротор следует вращающемуся магнитному полю статора с синхронной скоростью. Если поле статора останавливается, ротор также останавливается. С этим ротором с постоянными магнитами не требуется ток ротора и, следовательно, вырабатывается меньше тепла.
Также эти двигатели обладают высоким КПД за счет отсутствия тока ротора. Чтобы узнать положение ротора относительно статора, на ротор помещается энкодер, который действует как обратная связь с контроллером двигателя.
Конструкция асинхронного сервомотора переменного тока r идентична конструкции обычного двигателя. В этом двигателе статор состоит из сердечника статора, обмотки якоря и выводного провода, а ротор состоит из вала и сердечника ротора, который построен с проводником, как и ротор с короткозамкнутым ротором. Асинхронный серводвигатель переменного тока
Принцип работы этого серводвигателя аналогичен обычному асинхронному двигателю. Опять же, контроллер должен знать точное положение ротора с помощью энкодера для точного управления скоростью и положением.
Принцип работы серводвигателя переменного тока
Принципиальная схема сервосистемы для двухфазного асинхронного двигателя переменного тока показана на рисунке ниже. При этом опорный вход, при котором вал двигателя должен удерживаться в определенном положении, передается на ротор синхронного генератора как механический входной тета. Этот ротор подключен к электрическому входу с номинальным напряжением и фиксированной частотой.
Три клеммы статора синхрогенератора подключены соответственно к клеммам управляющего трансформатора.Угловое положение двухфазного двигателя передается на ротор управляющего трансформатора через зубчатую передачу и представляет собой условие управления альфа.
Изначально существует разница между положением вала синхронизатора и положением вала управляющего трансформатора. Эта ошибка отражается как напряжение на управляющем трансформаторе. Это напряжение ошибки подается на сервоусилитель, а затем на фазу управления двигателем.
При подаче управляющего напряжения ротор двигателя вращается в нужном направлении до тех пор, пока погрешность не станет равной нулю.Таким образом обеспечивается желаемое положение вала в серводвигателях переменного тока.
В качестве альтернативы современные сервоприводы переменного тока представляют собой встроенные контроллеры, такие как ПЛК, микропроцессоры и микроконтроллеры, для достижения переменной частоты и переменного напряжения для управления двигателем.
В основном, методы широтно-импульсной модуляции и пропорционально-интегрально-производной (ПИД) используются для управления желаемой частотой и напряжением. Блок-схема системы серводвигателя переменного тока с использованием программируемых логических контроллеров, позиционных и сервоконтроллеров приведена ниже.
Разница между серводвигателями постоянного и переменного тока
| Серводвигатель постоянного тока | Серводвигатель переменного тока |
|---|---|
| Обеспечивает высокую выходную мощность | Обеспечивает низкую мощность от 0,5 Вт до 100 Вт |
| У него больше проблем со стабильностью | У него меньше проблем со стабильностью |
| Он требует частого обслуживания из-за наличия коммутатора | Он требует меньше обслуживания из-за отсутствия коммутатора |
| Он обеспечивает высокую эффективность | КПД серводвигателя переменного тока меньше и составляет от 5 до 20% |
| Срок службы серводвигателя постоянного тока зависит от срока службы щеток | Срок службы серводвигателя переменного тока зависит от срока службы подшипников |
| Включает постоянный магнит в своей конструкции | Серводвигатель переменного тока синхронного типа использует постоянный магнит, в то время как индукционный тип doe sn’t требовать этого. |
| Эти двигатели используются для приложений большой мощности | Эти двигатели используются для приложений малой мощности |
— типы, конструкция, работа, управление и применение
Типы серводвигателей — конструкция, управление и приложенияВыбор двигателя — самая сложная задача, основанная на таких критериях проектирования, как стоимость, крутящий момент, ускорение, точность позиционирования, мощность и многое другое. Существует множество типов двигателей, таких как DC, Servo и Stepper , доступных для различных типов приложений.Но серводвигатели бывают с быстрым функционированием, высоким крутящим моментом и точным вращением . Да, шаговые двигатели — это высокопроизводительная альтернатива сервоприводам. Но настроить шаговый двигатель сложнее, чем серводвигатель .
Чтобы узнать больше о работе, конструкции, механизме, типах и применении серводвигателей, продолжайте чтение…
Что такое серводвигатель?Сервопривод — это электромагнитное устройство, использующее механизм отрицательной обратной связи для преобразования электрического сигнала в управляемое движение.По сути, сервоприводы действуют как приводы, которые обеспечивают точное управление скоростью, ускорением, а также линейным или угловым положением. Он состоит из четырех частей: двигателя постоянного тока, датчика положения, зубчатой передачи и цепи управления. Зубчатый механизм, связанный с двигателем, обеспечивает обратную связь с датчиком положения.
Если двигатель сервопривода работает от постоянного тока, он называется серводвигателем постоянного тока, а если он работает от переменного тока, он называется серводвигателем переменного тока. Шестерня серводвигателя обычно сделана из пластика, но в сервоприводах большой мощности она сделана из металла.
Серводвигатели производятся многими компаниями, в том числе FUTABA, HITECH, AIRTRONICS и JR RADIOS. Они одинаковы по производству, но различаются типом разъема, цветом проводов и т. Д. На рынке доступно множество типов сервоприводов: переменного, постоянного тока, непрерывного, позиционного и линейного серводвигателя.
Типы сервомоторов На основе вращения- Сервоприводы позиционного вращения : Позиционные сервоприводы могут вращать вал примерно на половину круга.Кроме того, он имеет функцию защиты датчика вращения от чрезмерного вращения. Позиционные сервоприводы в основном используются в конечностях, роботизированных руках и во многих других местах.
- Сервоприводы непрерывного вращения : Сервоприводы непрерывного действия аналогичны по конструкции позиционным сервоприводам. Но он может двигаться как по часовой стрелке, так и против часовой стрелки. Эти типы сервоприводов используются в радиолокационных системах и роботах.
- Линейные сервоприводы : Линейные сервоприводы также похожи на позиционный сервопривод, но с дополнительными шестернями для регулировки выходного сигнала с кругового на возвратно-поступательное.Сервоприводы такого типа используются в авиамоделях больших размеров и редко можно найти в магазинах.
Также используются два типа серводвигателей, которые различаются обработкой информации и сигнала.
- Аналоговые серводвигатели
Аналоговые сервоприводы работают по сигналам ШИМ (широтно-импульсной модуляции). И диапазон сигнала составляет от 4,8 В до 6 В. В сервоприводе этого типа ШИМ выключен, когда сервопривод находится в состоянии покоя.Крутящий момент, создаваемый во время покоя, делает время пуска неактивным. Кроме того, аналоговый сервопривод может посылать только 50 импульсов в секунду.
- Цифровые серводвигатели
Использование небольших микропроцессоров Digital Servo принимает сигнал и действует с помощью высокочастотных импульсов напряжения. Цифровой сервопривод может отправлять 300 импульсов в секунду, что очень много по сравнению с аналоговым сервоприводом. Цифровой сервопривод обеспечивает плавный отклик и постоянный крутящий момент за счет более быстрого импульса.Цифровые сервоприводы потребляют больше энергии, чем аналоговые сервоприводы.
На основе рабочей мощности
- Серводвигатель постоянного тока
Сервоприводы постоянного тока используются для обеспечения быстрого отклика крутящего момента и также известны как электродвигатели постоянного тока с постоянными магнитами или электродвигатели постоянного тока с независимым возбуждением. Причина обеспечения быстрого отклика крутящего момента заключается в том, что крутящий момент и промывка разделены. Таким образом, небольшое изменение напряжения или тока якоря может вызвать заметное изменение положения или скорости вала.Сервоприводы постоянного тока являются наиболее часто используемыми серводвигателями среди всех типов.
- Серводвигатель переменного тока
Существует два типа серводвигателей переменного тока: один двухфазный, а второй — трехфазный. В основном двухфазный серводвигатель с короткозамкнутым ротором используется в приложениях с низким энергопотреблением. Трехфазный сервопривод с короткозамкнутым ротором используется в системах с большой мощностью.
Конструкция серводвигателяСерводвигатель представляет собой двигатель постоянного тока, который состоит из 5 следующих частей: —
- Обмотка статора : Этот тип обмотки намотан на неподвижную часть двигателя.Он также известен как обмотка возбуждения двигателя.
- Ротор Обмотка : Этот тип обмотки наматывается на вращающуюся часть двигателя. Он также известен как обмотка якоря двигателя.
- Подшипник : они бывают двух типов, то есть подшипник купели и задний подшипник, которые используются для движения вала.
- Вал : Обмотка якоря соединена с железным стержнем, известным как вал двигателя.
- Энкодер : Он имеет приблизительный датчик, который определяет скорость вращения двигателя и число оборотов двигателя в минуту.
Он состоит из трех основных типов:
- Управляющее устройство
- Выходной датчик
- Система обратной связи
Серводвигатель работает на феномене автоматической системы с обратной связью. Контроллер необходим для этой системы с обратной связью. Этот контроллер состоит из компаратора и цепи обратной связи. Он имеет один выход и два входа. При этом для создания выходного сигнала компаратор используется для сравнения необходимого опорного сигнала, и этот выходной сигнал воспринимается датчиком.Входной сигнал для двигателя называется сигналом обратной связи. На основании сигнала обратной связи мотор начинает работать. Сигнал компаратора называется логическим сигналом двигателя. Двигатель будет включен в течение желаемого времени, когда логическая разница выше, и двигатель будет выключен в течение желаемого времени, когда логическая разница меньше. В основном, компаратор используется, чтобы решить, включен или выключен двигатель. Правильное функционирование мотора можно осуществить с помощью хорошего контроллера.
Управление серводвигателем :Серводвигатели могут управляться методом ШИМ, т.е. широтно-импульсной модуляцией. Они посылают на двигатель электрические сигналы непостоянной ширины. Ширина импульса изменяется в диапазоне от 1 миллисекунды до 2 миллисекунд и передается на серводвигатели с повторением 50 раз в секунду. Ширина импульса определяет угловое положение вращающегося вала. Здесь используются три термина, которые показывают управление серводвигателем i.е., максимальный импульс, минимальный импульс и частота повторения.
Например, , сервопривод перемещается с импульсом в 1 миллисекунду, чтобы повернуть двигатель на 0 °, тогда как импульс в 2 миллисекунды для поворота двигателя на 180 °. Между угловыми положениями ширина импульса меняется сама по себе. Следовательно, сервопривод поворачивается на 90 ° с импульсом длительностью 1,5 миллисекунды.
В каждом серводвигателе есть три провода или вывода. Два провода используются от положительного источника питания и заземления, а третий провод используется для управления сигналом.
Работа серводвигателейСервопривод имеет датчик положения, двигатель постоянного тока, систему передач, цепь управления. Двигатель постоянного тока работает с высокой скоростью и низким крутящим моментом при питании от батареи. Эта скорость ниже, а крутящий момент будет выше, чем у узла шестерни и вала, подключенного к двигателям постоянного тока. Положение вала определяется датчиком положения из его определенного положения и передает информацию в схему управления. Сигнал декодируется схемой управления от датчика положения и управляет направлением вращения, чтобы получить правильное положение.Ему требуется источник постоянного тока от 4,8 В до 6 В.
Редуктор подключен к валу, который снижает частоту вращения двигателя. Выходной вал редуктора такой же, как и у двигателя, который соединен с энкодером или потенциометром. Затем выход энкодера подключается к цепи управления. Провода серводвигателя также подключены к цепи управления. Управление двигателем через микроконтроллер путем отправки сигналов в форме ШИМ, которые декодируют схему управления для вращения двигателя на требуемый угол, схема управления перемещает двигатель по часовой стрелке или против часовой стрелки, при этом вал также вращается в желаемом направлении.энкодер отправляет сигнал обратной связи в схему управления. Когда двигатель достигает необходимого угла, схема управления останавливает двигатель в соответствии с полученными сигналами от энкодера.
Например, ., Если двигатель находится под углом 30 °, а микроконтроллер подает на двигатель угол 60 °, тогда схема управления вращает двигатель по часовой стрелке. Когда двигатель достигает 60 °, энкодер посылает сигнал в схему управления, чтобы остановить двигатель.
Применения серводвигателейВот некоторые приложения, используемые для управления скоростью, когда сервопривод перегружен или чрезмерно вращается:
- Они используются для управления позиционированием и движением лифтов в радиоуправляемых самолетах
- Они играют роль важную роль в робототехнике информации о роботах из-за их плавного включения и выключения и точного позиционирования.
- Они используются в гидравлических системах для поддержания гидравлической жидкости в аэрокосмической промышленности.
