Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре.
 Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°). - Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°). Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.

Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг).
Этот режим позволяет увеличить крутящий момент почти в половину от номинального.Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.

Драйверы делятся на две категории:
- Повторяющие форму сигналов. Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
- Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
Схема подключения шагового двигателя 4 провода
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор – это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса – положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
В статье подробно рассказано о нескольких способах обновления BIOS на материнской плате Asus.
Теперь вы точно подберете идеальный ноутбук для работы или учебы!
Данная статья описывает преимущества SSD накопителей для приложений и игр. Также здесь выполняется сравнение между достоинств данного накопителя с устаревшим аналогом.
В статье речь идет о том, как отремонтировать пластмассовый китайский электрочайник.
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ). Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.

Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.

Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т. д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т. е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ — керамические конденсаторы.
С3 = 470 мкФ х 16В — электролитический конденсатор.
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Схемы управления шаговыми двигателями
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
= 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т. е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн |
Lбиполяр. . = 4 * Lуниполяр. . = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Originally posted 2018-11-23 11:47:42. Republished by Blog Post Promoter
Шаговый Двигатель Схема Подключения — tokzamer.ru
Формирование импульсов отводится микроконтроллерам например Arduino.
В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора.
Путь для повышения магнитного поля — это увеличение тока или числа витков обмоток.
Управление биполярным шаговым двигателем com/embed/1riF4S3VIR8″ frameborder=»0″ allowfullscreen=»»/>
com/embed/1riF4S3VIR8″ frameborder=»0″ allowfullscreen=»»/>
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Например, двигатели с дисковым намагниченным ротором. Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки на Рисунке 10 они не показаны.
Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя.
Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: скорости. Причиной этого является фильтрующее действие инерции ротора и нагрузки.
Управление шаговым двигателем
Сморите видео
Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полная схема, приведенная в [ 10 ] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. С помощью подстроечного резистора видно на правом фото можно задавать выходной ток.
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах Рисунок
Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров.
Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. При этом используется номинальное число шагов.
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов.
Это означает, что в таком режиме не может быть получен полный момент. Внутри находятся полюсные наконечники в виде ламелей.
Шаговый двигатель БЕЗ ДРАЙВЕРА!
Еще по теме: Кабельные столбики пуэ
Виды шаговых двигателей по типу ротора:
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы.
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А.
Упрощенная схема коммутатора шагового двигателя без реверса. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса.
Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки.
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.
Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше.
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Технические характеристики A4988
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Можно увеличить количество шагов в 16, 32, 64 раза и т.
Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП. Таким образом, выполняется один шаг.
Шаговые двигатели.
Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки. Режим управления двигателем задается коммутатором. Шаговые двигатели.
Рекомендуем: Необходимый метериал для проведения электричества
Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.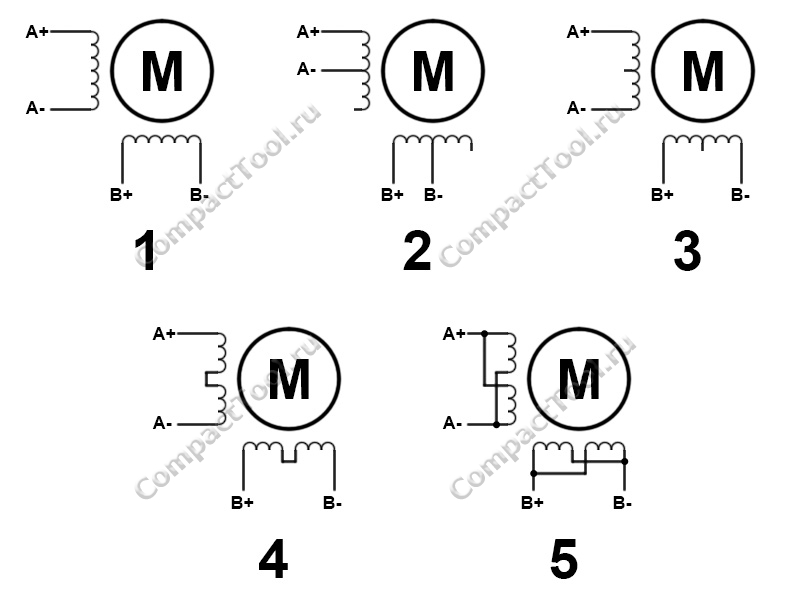 Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление — соответственно вдвое меньше. Так, пожалуй, можно дать строгое определение. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
Общие сведения:
Микрошаговый режим. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Диаграммы, диаграммы
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах. Описание библиотеки для работы с шаговым двигателем В среде разработки Ардуино IDE существует стандартная библиотека Strepper. Гибридный двигатель.
Обзор копеечной платы управления шаговым двигателем.
Подключение шагового двигателя к Arduino через драйвер L298
На втором месте рейтинга двигателей для роботов после сервоприводов, которые мы уже рассматривали, стоят шаговые двигатели. Сегодня мы научимся управлять ими при помощи Arduino!
Кроме шагового двигателя (ШД) и Arduino нам потребуется ещё плата драйвера L298, которую можно приобрести у нас в магазине.
Шаговый двигатель позволяет точно спозиционировать вал, поворачивая его на небольшой угол. Один такой поворот зовётся шаг. Соответственно, одной из важных характеристик привода является количество шагов на оборот, то есть «разрешение» поворота.
ШД способен удерживать свою позицию даже в случае внешнего крутящего момента! Шаговые двигатели делятся на униполярные и биполярные. Мы будем использовать униполярный ШД, так как биполярный требует специальный драйвер для управления, тогда как униполярным можно легко управлять даже при помощи сборки транзисторов. Обратите внимание – биполярные ШД имеют 4 провода на выходе, униполярные – не 4 (5 или более).
Количество выводов зависит от количества обмоток в двигателе, чаще всего их 4 –поэтому 5 проводов (4 обмотки и общий). Управление униполярным двигателем, в теории, сводится к перебору обмоток (подачи поочерёдно логической единицы). Задержка между переключением обмотки определяет скорость и ускорение двигателя.
В отличие от приводов постоянного тока, на ШД нельзя вот так вот просто подать напряжение так, чтобы он крутился. Необходимо попеременно подавать напряжение на разные обмотки.
Но, так как ток двигателя явно больше, чем 20мА, которые может дать один пин микроконтроллера, то применяются различные драйверы, как и наш L298.
Для реализации проекта из этой статьи нам потребуются следующие компоненты:
Для управления шаговым двигателем сгодится любой контроллер Arduino, мы же используем Arduino UNO. От шаговика отходят две пары проводов и общий(GND). A, A+ подключаются к MA, MA+, также и B, B+ к MB, MB+.
Питание 12В подаётся на первый контакт разъёма питания, 5В – на второй, GND – на третий (см. фото ниже). Выводы IN1-IN4 подключаются по порядку к цифровым пинам с 8 по 11 – по ним передаются управляющие импульсы.
После подключения надо загрузить в контроллер программу-пример stepper_oneRevolution из библиотеки Stepper (включена в комплект поставки). Можете добавить ее либо с этой страницы, либо найти в Файл Примеры Stepper stepper_oneRevolution
Как подключить шаговые двигатели
Контроллер Buildbotics с ЧПУ предоставляет четыре биполярных драйвера шаговых двигателей. Он не может управлять униполярными шаговыми двигателями.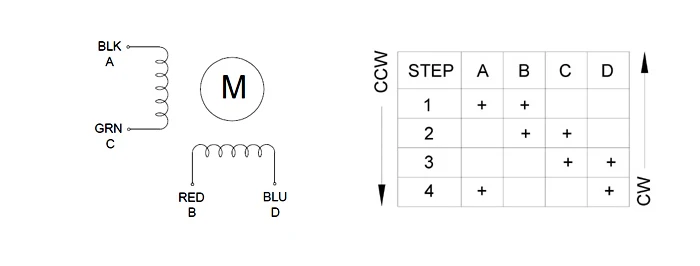 К счастью, большинство шаговых двигателей можно подключить как биполярные.
К счастью, большинство шаговых двигателей можно подключить как биполярные.
Для подключения шагового двигателя к контроллеру Buildbotics с ЧПУ необходимо правильно подключить четыре провода от драйвера к правым проводам на двигателе. К сожалению, шаговые двигатели бывают самых разных конфигураций, и не всегда сразу понятно, как их подключить.Шаговые двигатели отличаются друг от друга по нескольким характеристикам. Одно большое отличие — это количество проводов, идущих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйверов двигателей через заднюю панель на портах, обозначенных X, Y, Z и A. Все четыре этих порта имеют одинаковую проводку и выглядят следующим образом:
Каждый выход имеет четыре контакта.Верхний левый штифт — B +, нижний левый — B-, верхний правый — A-, а нижний правый — A +. B- и B + должны управлять одной из катушек двигателя, а A- и A + должны управлять другой катушкой двигателя.
Buildbotics предоставляет готовые кабели, которые подключаются к выходам драйверов на одном конце. Эти кабели имеют цветовую кодировку: провод A + красный, провод A- черный, провод B + желтый, а провод B- фиолетовый.
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A + и A- к одной из катушек двигателя, а B + и B- — к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
- Если вы не можете найти техническое описание, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя. Если вы измеряете почти короткое замыкание, то эта пара составляет одну катушку, а два других провода — вторую катушку. Если это разрыв, измерьте расстояние между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете почти короткое замыкание. Обратите внимание, что я говорю «почти короткий», потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
- Если у вас нет омметра, большинство людей может определить пары наощупь. Валы шаговых двигателей довольно легко поворачиваются, когда катушки двигателя разомкнуты, но их труднее вращать, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело его вращать.Затем скрутите два любых провода вместе. Если двигатель вращать значительно труднее, значит, вы замкнули одну из катушек и определили пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому. Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, и это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
 Если вы измеряете почти короткое замыкание, то эта пара составляет одну катушку, а два других провода — вторую катушку. Если это разрыв, измерьте расстояние между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете почти короткое замыкание. Обратите внимание, что я говорю «почти короткий», потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Если вы измеряете почти короткое замыкание, то эта пара составляет одну катушку, а два других провода — вторую катушку. Если это разрыв, измерьте расстояние между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете почти короткое замыкание. Обратите внимание, что я говорю «почти короткий», потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело его вращать.Затем скрутите два любых провода вместе. Если двигатель вращать значительно труднее, значит, вы замкнули одну из катушек и определили пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому. Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, и это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело его вращать.Затем скрутите два любых провода вместе. Если двигатель вращать значительно труднее, значит, вы замкнули одну из катушек и определили пару. Если нет, отсоедините два провода друг от друга и подключите третий провод к первому. Если мотор не становится труднее вращаться, отсоедините третий провод от первого и подключите четвертый провод. Одну из комбинаций должно быть труднее повернуть, и это одна катушка, а два провода составляют другую катушку. После того, как пары идентифицированы, произвольно назначьте одну пару как «A», а другую как «B» и произвольно назначьте один провод как «+», а другой как «-» в каждой паре.Затем подключите провода, как показано. При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Подключение 5-проводных двигателей
5-проводные двигатели являются строго униполярными двигателями и не могут быть подключены как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводные двигатели могут быть сконфигурированы как униполярные или как последовательные биполярные двигатели.Контроллер ЧПУ Buildbotics не поддерживает однополярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с отводами и открывают концы катушек и центральный проводник с отводами. Это по три провода на каждую из двух катушек. Центральные отводы не подключены, а концы катушек подключены, как показано. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке и какой из этих проводов является центральным проводником. Вот два метода:
- Найдите документацию на двигатель.Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется позвонить поставщику. Приложив немного усилий, обычно можно получить техническое описание двигателя. В таблице данных обычно указываются провода A +, A-, B + и B- или, по крайней мере, указывается, какие провода по цвету прикреплены к каким катушкам.
- Используйте омметр для определения отдельных катушек. Любые провода, которые кажутся подключенными через несколько Ом, будут частью одной катушки.Провода, которые кажутся открытыми, являются частью различных катушек. Произвольно выберите одну из катушек как «A», а другую как «B». После идентификации катушек измерьте сопротивление между каждым из трех проводов этой катушки. Сопротивление между двумя концами катушки будет примерно в два раза больше сопротивления между любым концом катушки и центральным отводом катушки. Когда концы катушки идентифицированы, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано.При таком подключении существует вероятность 50%, что двигатель повернет назад. Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
 Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.
Если он повернется не в ту сторону, просто поменяйте местами одну (а не обе) пары, и двигатель повернет в обратном направлении.Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели. Контроллер ЧПУ Buildbotics не поддерживает униполярные соединения. Перед настройкой 8-проводного двигателя вы должны сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель.Биполярные двигатели с параллельным подключением обычно обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатель, подключенный последовательно. Последовательная конфигурация должна использоваться, если ток параллельной конфигурации превышает выходные возможности драйвера. Это особенно актуально для двигателей большего размера. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны подключения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельно подключенного биполярного шагового двигателя.
Перебрать все возможные комбинации подключений омметром или наощупь нереально. Чтобы подключить его, вам понадобится техническое описание двигателя. Предполагая, что у вас его еще нет, прочтите номер модели двигателя, а затем поищите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить техническое описание двигателя. В таблице данных обычно указываются провода A1 +, A1-, A2 +, A2-, B1 +, B1-, B2 + и B2- или что-то в этом роде.Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
4.2. Подключение шагового двигателя и блока питания
Информация в этом разделе может помочь вам подключить шаговый двигатель и источник питания к Tic.
Во избежание повреждений или травм внимательно прочтите эти предупреждения по технике безопасности:
Предупреждение: Этот продукт не разработан и не сертифицирован по каким-либо конкретным стандартам безопасности высокого напряжения. Работа с напряжением выше 30 В может быть чрезвычайно опасной и должна выполняться только квалифицированными специалистами с соответствующим оборудованием и защитным снаряжением.
Предупреждение: Подключение или отключение шагового двигателя при включенном питании двигателя (VIN) Tic может вывести из строя драйвер двигателя. (В более общем плане, переустановка чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Предупреждение: Этот продукт может стать достаточно горячим, чтобы обжечься задолго до того, как чипы перегреются. Будьте осторожны при обращении с этим продуктом и другими подключенными к нему компонентами.
Перед подключением чего-либо к Tic, мы рекомендуем запустить программное обеспечение Tic Control Center, чтобы убедиться, что оно может подключаться к Tic через USB.Таким образом, вы можете убедиться, что Tic работает, прежде чем тратить время на пайку разъемов или подключение другой электроники, и если что-то пойдет не так, вы лучше поймете, что вызвало проблему.
Подключение биполярного шагового двигателя с четырьмя или шестью выводами
Биполярные шаговые двигатели обычно имеют четыре или шесть выводов. Эти двухфазные шаговые двигатели имеют по одной катушке на фазу, с одним выводом, подключенным к каждому концу каждой катушки. Версии с шестью выводами также обеспечивают доступ к центрам двух катушек, так что двигатель может дополнительно управляться униполярным драйвером.При управлении шестиконтактным шаговым двигателем с помощью биполярного драйвера, такого как Tic, используются только концы катушек, а два центральных вывода следует оставить отсоединенными.
|
|

Замена A1 на A2 или B1 на B2 на приведенных выше диаграммах просто меняет направление двигателя. Если поменять местами оба направления, направление останется неизменным.
Подключение биполярного шагового двигателя с восемью выводами
В отличие от шаговых двигателей с четырьмя и шестью выводами, которые имеют по одной катушке на фазу, униполярный / биполярный шаговый двигатель с восемью выводами имеет две катушки на фазу и дает вам доступ ко всем выводам катушки.У вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно.
При использовании их параллельно вы уменьшаете индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток. Однако, поскольку Tic активно ограничивает выходной ток по фазе, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек. При последовательном использовании фазных катушек это похоже на одну катушку на фазу (например, типы двигателей, описанные выше). Обычно мы рекомендуем использовать последовательное соединение. На следующей схеме показано, как подключить такой шаговый двигатель к Tic с каждой парой фазовых катушек параллельно (слева) или последовательно (справа):
Обычно мы рекомендуем использовать последовательное соединение. На следующей схеме показано, как подключить такой шаговый двигатель к Tic с каждой парой фазовых катушек параллельно (слева) или последовательно (справа):
|
|
Блок питания
Чтобы подключить источник питания к Tic, подключите отрицательную клемму или клемму заземления источника питания к контакту GND Tic на стороне высокого тока платы (рядом с выходом двигателя A1). Затем подключите положительную клемму источника питания к контакту VIN рядом с ней.
Учебное пособие по подключению шагового двигателя— 42 бота
Иногда вы можете встретить старый шаговый двигатель, спасенный от принтера, или старый дисковод для гибких дисков. Если вам повезет, на двигателе будет номер детали, и, покопавшись, вы получите техническое описание. Однако часто у вас будет двигатель без какой-либо маркировки и с торчащими четырьмя или шестью разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединены в пары для образования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть способ лучше! Все, что вам нужно, — это мультиметр.
Если вам повезет, на двигателе будет номер детали, и, покопавшись, вы получите техническое описание. Однако часто у вас будет двигатель без какой-либо маркировки и с торчащими четырьмя или шестью разноцветными проводами. Во-первых, вам нужно выяснить, как провода соединены в пары для образования катушек внутри двигателя. Метод проб и ошибок может сработать, но есть способ лучше! Все, что вам нужно, — это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель.Биполярные шаговые двигатели имеют две обмотки, которые не соединены друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на схеме выше не подключены, сопротивление между выводами A1 и B1 или между A1 и B2 будет бесконечным. Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечности (хотя и больше нуля), поскольку они являются частью одной обмотки. Физическое расположение проводов или цвета могут иногда указывать на соединение, как на фотографиях ниже.Тем не менее, простая проверка с помощью мультиметра, настроенного на опцию измерения сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей в коде и проводке.
Изображение 1: Черный и желтый провод не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление
Изображение 2: Оранжевый и желтый провод являются частью одной катушки, так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода принадлежат каждой катушке, как определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному приводу.Подключите питание и запустите код, чтобы вращать двигатель по часовой стрелке. Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если он вращается в обратном направлении, вам нужно поменять полярность одной из двух пар (неважно какой).
Если он вращается в обратном направлении, вам нужно поменять полярность одной из двух пар (неважно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигателис шестью проводами являются униполярными и имеют по одной обмотке на фазу (как биполярные шаговые двигатели), но с центральным ответвлением. Внутренняя проводка этих моторов выглядит так:
Глядя на диаграмму выше, мы можем предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2.Это потому, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2. То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с двухполюсным 4-проводным шаговым двигателем, нет соединения (бесконечного сопротивления) между любыми проводами от катушки B и катушки A. Пришло время проверить теорию!
Изображение 3: Черный и Коричневый провода, очевидно, являются частью одной катушки (сопротивление приблизительно 194 Ом)
Изображение 4: Черный и верхний красный провод (на этом шаговом двигателе два красных провода) также являются частью одной катушки (сопротивление приблизительно 97 Ом).
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, поскольку сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводами. Для правильного измерения вы также должны измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провод.Мультиметр показывает отсутствие электрического соединения между желтым и черным проводами.
Чтобы убедиться в этом, я также дважды проверил сопротивление между нижним красным проводом и желтым проводом, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный приговор:
Одна катушка — это черный и коричневый провода, с верхним красным проводом в качестве центрального отвода.
Другая катушка — с желтым и оранжевым проводами, а нижний красный провод — с центральным отводом.
Если у вашего двигателя 5 проводов, проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его и затем выполните те же испытания, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором соединены два центральных выступа. Дешевый шаговый двигатель 28byj-48 (см. Руководство) является примером этого.
Вы по-прежнему можете использовать тест сопротивления для определения центрального отвода, но сопротивление между остальными 4 проводами будет таким же из-за общего центрального отвода.Здесь будут полезны методы проб и ошибок или хорошая документация.
Если у вашего двигателя 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было такого типа степперов, поэтому не могу говорить об этом по своему опыту, но использование мультиметра и проверка проводов в паре должны дать вам пары (в конечном итоге). Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке. Скорее всего, это потребует некоторых проб и ошибок, используя драйвер шагового двигателя.
Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке. Скорее всего, это потребует некоторых проб и ошибок, используя драйвер шагового двигателя.
Как использовать шаговый двигатель: 12 шагов (с изображениями)
Существует несколько различных способов управления шаговыми двигателями, включая полный шаг, полушаг и микрошаг. Каждый из этих стилей вождения предлагает разные величины крутящего момента и размеры шага, которые может использовать шаговый двигатель.
У полного шагового привода всегда два электромагнита «включены». Чтобы вращать центральный вал, один из электромагнитов выключается, а следующий электромагнит включается, заставляя вал вращаться на 1/4 зубца (по крайней мере, для гибридных шаговых двигателей).Этот стиль, когда всегда включены два электромагнита, имеет наибольший крутящий момент из всех стилей, но самый большой размер шага.
Полушаговый привод попеременно имеет два электромагнита и только один включенный электромагнит. Чтобы вращать центральный вал, на первый электромагнит подается питание в качестве первой ступени, затем на второй также подается питание, в то время как на первый все еще подается питание для второй ступени. Третья ступень выключает первый электромагнит, а четвертая ступень включает третий электромагнит, при этом второй электромагнит все еще находится под напряжением.Этот шаблон, показанный на рисунке выше, использует вдвое больше шагов, чем полный шаговый привод, что позволяет использовать половину размера шага, но он также имеет меньший общий крутящий момент, поскольку не всегда есть два электромагнита, удерживающих центральный вал на месте.
Чтобы вращать центральный вал, на первый электромагнит подается питание в качестве первой ступени, затем на второй также подается питание, в то время как на первый все еще подается питание для второй ступени. Третья ступень выключает первый электромагнит, а четвертая ступень включает третий электромагнит, при этом второй электромагнит все еще находится под напряжением.Этот шаблон, показанный на рисунке выше, использует вдвое больше шагов, чем полный шаговый привод, что позволяет использовать половину размера шага, но он также имеет меньший общий крутящий момент, поскольку не всегда есть два электромагнита, удерживающих центральный вал на месте.
Microstepping, что неудивительно, имеет наименьший возможный размер шага из всех этих стилей. Один из наиболее распространенных способов выполнения микрошага — это «микрошаговый синус-косинус». Это означает, что ток, протекающий через каждую катушку, регулируется таким образом, что создается синусоидальная / косинусоидальная волна.«Перекрытие» волн между двумя катушками приводит к большому количеству подшагов. Фактическое количество подшагов зависит от того, сколько различных изменений тока вы можете обеспечить катушкам, но микрошаг по-прежнему будет иметь наименьшие размеры шага и, следовательно, наиболее точное движение из всех стилей. Крутящий момент, связанный с этим стилем, зависит от того, сколько тока проходит через катушки в конкретное время, но всегда будет меньше, чем у полного шагового привода.
Фактическое количество подшагов зависит от того, сколько различных изменений тока вы можете обеспечить катушкам, но микрошаг по-прежнему будет иметь наименьшие размеры шага и, следовательно, наиболее точное движение из всех стилей. Крутящий момент, связанный с этим стилем, зависит от того, сколько тока проходит через катушки в конкретное время, но всегда будет меньше, чем у полного шагового привода.
Электропроводка и соединения шагового двигателя | Электрические схемы
Раздел 5: Подключение двигателяШаговые двигатели имеют четыре, шесть или восемь проводов; Старые двигатели могут иметь пять проводов, но здесь они не рассматриваются.
Четырехпроводные двигатели наиболее просты в подключении и не имеют вариантов подключения. Просто подключите одну обмотку к клеммам, обозначенным «Phase A» и «Phase / A», а другую обмотку — к клеммам, которые имеют надписи «Phase B» и «Phase / B». Если неизвестно, какие провода к какой фазе относятся, просто используйте омметр и проверьте, какие провода имеют целостность. Те, у которых есть непрерывность, будут принадлежать к одной и той же фазе; если двигатель вращается в неправильном направлении при подключении, просто поменяйте местами «Фаза A» и «Фаза / A».Типичное четырехпроводное подключение двигателя показано на Рисунке 8.
Те, у которых есть непрерывность, будут принадлежать к одной и той же фазе; если двигатель вращается в неправильном направлении при подключении, просто поменяйте местами «Фаза A» и «Фаза / A».Типичное четырехпроводное подключение двигателя показано на Рисунке 8.
Рисунок 8
Шестипроводные двигатели являются наиболее распространенными. Возможны два варианта подключения: полнообмоточный и полуобмоточный. Шестипроводный двигатель аналогичен четырехпроводному двигателю, за исключением того, что на каждой из двух обмоток имеется центральный отвод, всего шесть проводов. Для соединения половинной обмотки используется центральный отвод и один из оконечных проводов. Это показано на Рисунке 9.
Рисунок 9
Для соединения с полной обмоткой, как показано на Рисунке 10, центральный отвод игнорируется и используются оба концевых провода.Термин «полная обмотка» в точности эквивалентен «последовательному» соединению, в то время как «полуобмотка» практически идентична «параллельному» соединению. Выбор между ними зависит от приложения, что обсуждается позже; просто не забудьте установить ток привода ровно на половину номинального униполярного тока двигателя, если он подключен к полной обмотке, и установить его на номинальный униполярный ток, если он подключен к половинной обмотке.
Рис. 10
Восьмипроводные двигатели примерно на 3% более эффективны при параллельном подключении, чем эквивалентный шестипроводный двигатель с полуобмоткой, но их гораздо сложнее подключить.Нет никакого преимущества при сравнении последовательного соединения с полнообмоточным соединением. Как и в шестипроводном двигателе, выбор между последовательным или параллельным подключением зависит от области применения. Не забудьте установить ток привода ровно на половину номинального тока параллельного двигателя (как показано на Рисунке 11) при использовании последовательного соединения, показанного на Рисунке 12.
Рисунок 11
Рисунок 12
Просмотрите выбор Geckodrive высококачественных драйверов шагового двигателя для ваших потребностей в управлении движением.
Была ли эта статья полезной? 2025 из 3928 считают этот материал полезным
Основы подключения: униполярный или биполярный
Простой способ изменить характеристики скорости и крутящего момента шагового двигателя — это подключить его к другому типу драйвера или изменить конфигурацию проводки.Однако это еще не все. Знание плюсов и минусов между «униполярным» и «биполярным» может улучшить или ухудшить производительность вашего шагового двигателя.
Давайте посмотрим на эти две разные кривые скорость-крутящий момент. Эти кривые фактически созданы для одного и того же «базового» двигателя, но с разными драйверами. Обратите внимание, как меняются характеристики скорости и крутящего момента. ПОДСКАЗКА: выберите определенную скорость, затем сравните крутящий момент на этой скорости.
| Шаговый двигатель NEMA 23 с биполярным драйвером | Шаговый двигатель NEMA 23 с униполярным драйвером |
| |
Кривая крутящего момента скорости отображает рабочие характеристики шагового двигателя с заданным набором напряжения, тока и типа драйвера и используется для определения того, будет ли двигатель соответствовать требованиям по крутящему моменту и скорости для приложения.На форму кривой крутящего момента влияют электрические характеристики двигателя, такие как ток или индуктивность.
ОБЗОР: Как создается крутящий момент?
Во-первых, давайте начнем с самого начала и рассмотрим, как создается крутящий момент шагового двигателя. Мы знаем, что крутящий момент пропорционален произведению тока возбуждения и количества витков обмотки (катушки). Чем больше число оборотов, тем выше крутящий момент, но приносится в жертву крутящий момент на высокой скорости, тем самым ограничивая максимальную скорость, на которой шаговый двигатель может эффективно работать.При меньшем количестве оборотов крутящий момент уменьшается на более низких скоростях, но сохраняется на более высоких скоростях.
Чем больше число оборотов, тем выше крутящий момент, но приносится в жертву крутящий момент на высокой скорости, тем самым ограничивая максимальную скорость, на которой шаговый двигатель может эффективно работать.При меньшем количестве оборотов крутящий момент уменьшается на более низких скоростях, но сохраняется на более высоких скоростях.
Давайте посмотрим на формулу крутящего момента.
Вот как ток влияет на кривую крутящего момента шагового двигателя.
Вот как количество витков обмотки влияет на кривую крутящего момента шагового двигателя.
Но… что делать, если вы не можете изменить ток обмотки или количество витков?
Н (количество витков обмотки) и I (ток) обычно указываются и не могут быть изменены, так что еще вы можете сделать, чтобы изменить кривую крутящего момента скорости? Если у вас есть хотя бы 6 проводов от вашего шагового двигателя, ответ — взгляните на «униполярные» и «биполярные» конфигурации проводки.
Что означает «однополярный» и «биполярный»?
Теперь давайте посмотрим на слова «однополярный» и «биполярный».Что именно означают эти слова?
Термины «униполярный» и «биполярный» произошли от типа драйверов, используемых для управления шаговыми двигателями. Проще говоря, «уни» в униполярном означает «один», а «би» в биполярном означает «два». «Полярность» означает электрическую и магнитную полярность (к сведению: направление тока определяет полярность).
| Основное различие между «униполярными» и «биполярными» шаговыми двигателями — это центральный отводной провод, который разделяет полные катушки обмотки пополам.Это можно сделать с помощью одного или двух проводов. Если вы удалите центральный кран, соединение станет биполярным. |
Основное различие между «униполярными» драйверами и «биполярными» драйверами заключается в их способности передавать ток. Способность драйвера посылать ток в одном или обоих направлениях напрямую зависит от количества транзисторов, используемых драйвером. Биполярный драйвер потребует вдвое больше транзисторов, чем униполярный драйвер, чтобы контролировать ток в обоих направлениях.
Способность драйвера посылать ток в одном или обоих направлениях напрямую зависит от количества транзисторов, используемых драйвером. Биполярный драйвер потребует вдвое больше транзисторов, чем униполярный драйвер, чтобы контролировать ток в обоих направлениях.
| СОВЕТ: Уточнение между «биполярным», «биполярным-последовательным», «биполярно-параллельным» и т. Д. |
Сам по себе двигатель не является униполярным или биполярным, но производители могут классифицировать шаговые двигатели как «униполярные» или «биполярные» в зависимости от количества выводных проводов. Следовательно, шестипроводной шаговый двигатель можно классифицировать как «униполярный» двигатель, а четырехпроводной шаговый двигатель можно классифицировать как «биполярный» двигатель. Однако помните, что «униполярный» двигатель всегда можно преобразовать в «биполярный». В то время как «униполярный» и «биполярный» — это термины, относящиеся к типу используемого драйвера, «униполярный», «биполярно-последовательный» и «биполярно-параллельный» используются для описания проводки между двигателем и драйвером. Подробнее об этом позже. |

Переходя от униполярного к биполярному или наоборот, мы фактически изменяем электрические характеристики обмотки внутри двигателя, такие как напряжение, сопротивление и индуктивность, а также характеристики крутящего момента.Производители двигателей часто показывают разные наборы спецификаций для одного и того же двигателя в зависимости от типа подключения. Для обеспечения гибкости предлагаются различные варианты обмотки для шаговых двигателей с одинаковым размером корпуса и длиной стека.
Для шаговых двигателей NEMA 23 (2,22 дюйма / 56,4 мм) предлагаются различные обмотки, короткая длина пакета
Как вы можете видеть выше, гибкость соединений возрастает с увеличением количества выводных проводов. Шестипроводной двигатель может быть подключен к однополярной или биполярной серии.Восьмипроводный двигатель может быть подключен к однополярному, биполярному последовательному или биполярно-параллельному соединению.
Униполярный драйвер имеет шесть клемм для подключения шести проводов от двигателя, а биполярный драйвер имеет четыре клеммы для подключения четырех, шести или восьми проводов от двигателя.
Хотя подключение четырехпроводного биполярного шагового двигателя к четырехполюсному биполярному драйверу довольно просто, вам действительно нужно знать, что вы делаете, чтобы подключить шести- или восьмипроводные биполярные шаговые двигатели к биполярному драйверу.
Не волнуйтесь. В конце этого поста мы расскажем о схемах подключения шагового двигателя, чтобы упростить задачу.
Q: Могу ли я использовать спецификацию максимального удерживающего момента для определения размера шагового двигателя? |
A: Поскольку максимальный удерживающий крутящий момент — это выходной крутящий момент шагового двигателя при нулевой или очень низкой скорости, он не рекомендуется для выбора двигателя. |
 Он используется для указания максимального крутящего момента, который может быть создан двигателем с полным номинальным током.
Он используется для указания максимального крутящего момента, который может быть создан двигателем с полным номинальным током.Какие есть все возможные способы подключения?
Существует только один способ подключения шестипроводного униполярного шагового двигателя к шестиконтактному униполярному драйверу, но есть несколько способов подключения шагового двигателя к биполярному драйверу в зависимости от количества проводов и желаемой производительности. В то время как униполярные драйверы более экономичны, биполярные драйверы предлагают большую гибкость и позволяют несколькими способами подключаться к четырех-, шести- и восьмипроводным шаговым двигателям.
Биполярные конфигурации проводки разделены на биполярно-последовательную, биполярно-параллельную и биполярную полукатушки.
- Униполярный (6 или 8 проводов)
- Биполярная серия (4, 6 или 8 проводов)
- Биполярно-параллельный (4 или 8 проводов)
- Биполярная полукатушка (6 или 8 проводов)
На схемах ниже показаны как обмотка двигателя, так и схема транзистора драйвера.
Униполярная и биполярная полукатушка
Для униполярной и биполярной полукатушки мы, по сути, разделяем всю катушку и одновременно используем половину обмотки.Таким образом, мы используем меньше витков обмотки, поэтому двигатель не будет выдавать большой крутящий момент. Поскольку индуктивность остается низкой, крутящий момент может поддерживаться до более высоких скоростей.
Биполярная серия
Для биполярной серии мы используем полную катушку (обмотку). При использовании всей обмотки двигатель будет выдавать больший крутящий момент по сравнению с однополярным. Однако индуктивность также увеличивается на четыре, поэтому крутящий момент быстро падает на более высоких скоростях.
Биполярно-параллельный
Для получения наилучших характеристик скорости и крутящего момента рекомендуется двухполюсное параллельное соединение.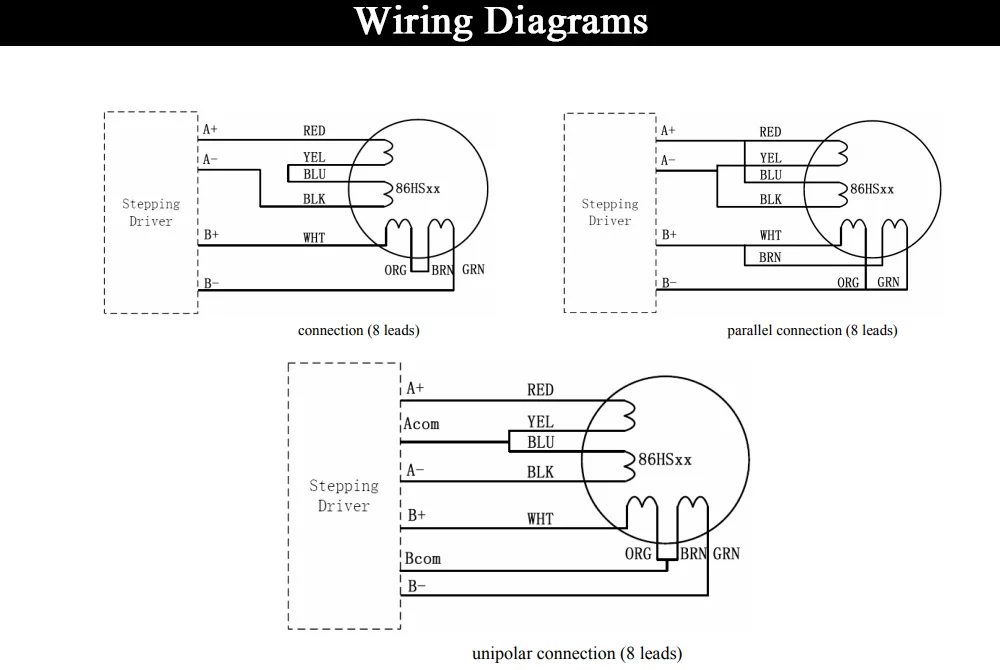 В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с униполярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент на более высоких скоростях. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
В этой конфигурации проводки также используется полная катушка, поэтому крутящий момент увеличивается примерно на 40% по сравнению с униполярным. Индуктивность также остается низкой, что позволяет поддерживать крутящий момент на более высоких скоростях. Однако мы должны увеличить ток примерно на 40%, чтобы получить эти преимущества.
Изменения в характеристиках кратко описаны ниже.
| Подключения | Сопротивление | Индуктивность | Текущий | Напряжение | Удерживающий момент |
| (Ом) | (мГн) | (А) | (В) | (унция-дюйм) | |
| Униполярный | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ |
| Биполярная серия | Униполярный X 2 | Униполярный X 4 | Униполярный X 0. 707 707 | Униполярный X 1,414 | Униполярный X 1,414 |
| Биполярный Половина катушки | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный | То же, что и униполярный |
| Биполярный параллельный | Униполярный X 0,5 | То же, что и униполярный | Униполярный X 1,414 | Униполярный X 0,707 | Униполярный X 1.414 |
Биполярно-параллельный режим обеспечивает низкую индуктивность при высоком токе и низком напряжении, что является хорошей комбинацией для наилучшего общего крутящего момента.
Как соединить униполярную и биполярную последовательные, биполярно-параллельные или биполярные полукатушки?
Быстрый ответ — следовать правильным схемам подключения двигателя. Сначала решите, какие конфигурации проводки возможны с вашим шаговым двигателем, а затем найдите правильную схему подключения, которой нужно следовать.
Сначала решите, какие конфигурации проводки возможны с вашим шаговым двигателем, а затем найдите правильную схему подключения, которой нужно следовать.
На схемах ниже показаны электрические схемы внутренней обмотки шаговых двигателей с различным количеством выводных проводов. Отслеживая ток, вы можете визуализировать, какая часть обмотки используется. Если есть интерес, прокомментируйте.
| 4 провода | 5 проводов | 6 проводов | 8 проводов |
| СОВЕТ: четырехпроводные шаговые двигатели |
Четырехпроводные шаговые двигатели могут иметь внутреннюю двухполярную последовательную или двухполюсную параллельную обмотку.Производители двигателей иногда не указывают, намотан ли четырехпроводной двигатель на двухполярную последовательную или двухполюсную параллельную. |
 Однако промышленность движется к биполярному параллельному соединению в качестве стандарта для параллельных подключений из-за его преимуществ в производительности. Еще один фактор — снижение стоимости драйвера.
Однако промышленность движется к биполярному параллельному соединению в качестве стандарта для параллельных подключений из-за его преимуществ в производительности. Еще один фактор — снижение стоимости драйвера.Здесь мы покажем, как управлять конфигурацией проводки из стандартных соединений.
Например, чтобы подключить восьмиполюсный шаговый двигатель к биполярному драйверу с биполярно-параллельной схемой подключения, вы должны соединить эти провода вместе, а затем подключить их к соответствующим клеммам:
- Подключите черный и оранжевый к клемме A
- Подключите желтый / зеленый к клемме A-
- Подключите красный / коричневый к клемме B
- Подключите белый / синий к клемме B-
| СОВЕТ: Большая тройка проводов шагового двигателя |
Для успешной системы шагового двигателя требуются три компонента: |
Какой способ подключения лучше?
Это вопрос с подвохом. Ответ: это действительно зависит от вашего приложения. Тип конфигурации электропроводки обычно включается на этапе определения размеров двигателя на этапе проектирования машины. Эти уловки с подключением также позволяют повторно использовать один и тот же двигатель для различных приложений.
Ответ: это действительно зависит от вашего приложения. Тип конфигурации электропроводки обычно включается на этапе определения размеров двигателя на этапе проектирования машины. Эти уловки с подключением также позволяют повторно использовать один и тот же двигатель для различных приложений.
Например, если вы используете установку униполярного шагового двигателя и хотите увеличить его крутящий момент на низкой скорости для другого приложения, стоит изучить конфигурацию проводки биполярной серии, чтобы сохранить тот же размер двигателя.Для наилучшего сочетания скорости и крутящего момента попробуйте биполярно-параллельный. Однако для этого требуется больше тока от драйвера. Помните, что это также зависит от того, какой у вас тип драйвера и какой ток он может выдавать.
Вот различия в характеристиках двигателя, показанные при наложении каждой индивидуальной кривой скорость-крутящий момент. Легко увидеть, как биполярно-параллельный (или параллельный биполярный) работает лучше всего.
Сводка
Подключив один и тот же шаговый двигатель по-разному, вы можете изменить электрические характеристики его обмотки и, в свою очередь, изменить рабочие характеристики того же двигателя, чтобы они лучше подходили для применения.Однако вам нужно знать, что вы делаете.
Биполярно-параллельные шаговые двигатели становятся все более популярными из-за снижения стоимости компонентов схемы драйвера. Чтобы упростить электромонтаж, двигатели Oriental Motor имеют внутреннюю обмотку, поэтому для подключения требуется всего четыре провода. Для каждого размера корпуса и длины стека предлагается несколько вариантов обмотки, чтобы обеспечить максимальную гибкость интеграции с различными электрическими конструкциями драйверов.
При работе с шаговыми двигателями лучше всего убедиться, что вся команда находится на одной странице с конфигурацией проводки.Вы можете выбрать подходящий двигатель и купить его, но неправильная разводка по крайней мере создаст некоторую путаницу.
Вот памятка по подключению, которая поможет при работе с униполярными и биполярными шаговыми двигателями. Не стесняйтесь делать закладки, если это поможет.
Подпишитесь, если вы хотите получать уведомления о будущих публикациях.
Схема подключения шагового двигателя — ElectroDragon
Существует два основных способа управления шаговым двигателем, в зависимости от того, можете ли вы поменять полярность на катушке или нет.Reprap может и делает, и это делает ненужными «лишние» провода на некоторых шаговых двигателях. См. Википедию и Шаговый двигатель # Bipolar для получения более подробной информации об однополосных и двухцветных шаговых двигателях.
Все драйверы шагового двигателя Reprap биполярны, поэтому, если вы используете стандартные драйверы, вам понадобится шаговый двигатель, который можно подключить как биполярный.
Для правильного подключения любого шагового двигателя нам необходимо определить, какие провода являются «парами» или подключены к концам каждой катушки. Их обычно называют катушкой «А» и катушкой «В», но это не так важно, как вы думаете.
Их обычно называют катушкой «А» и катушкой «В», но это не так важно, как вы думаете.
На этом рисунке показано подключение 6-проводных шаговых двигателей:
Файл: Unipolar-stepper-motor-windings.png
Четырехпроводные двигатели не имеют общего провода. Мы будем использовать все четыре провода, и нам нужно только определить, какие провода составляют две пары.
Пятипроводные двигатели имеют два общих провода на каждой катушке, подключенные внутри, и открытые как только один провод. Эта конфигурация не будет работать со стандартной электроникой, так как катушки не могут быть перевернуты независимо.Для униполярного привода общий провод обычно подключается к горячему, а четыре других заземляются попарно по очереди, чтобы запитать половину каждой катушки за раз, вращая двигатель. Некоторые люди пытались разобрать двигатель и преобразовать его в четырехпроводные двигатели, но пока нет отчета о результатах. И нет, отрезать пятый провод не получится, так как центральные точки каждой катушки все еще связаны внутри. В то время как приведенная выше информация о пятипроводных двигателях имеет смысл, при разработке BrickRap используется пятипроводной двигатель, приводимый в движение Pollullu.
В то время как приведенная выше информация о пятипроводных двигателях имеет смысл, при разработке BrickRap используется пятипроводной двигатель, приводимый в движение Pollullu.
Шестипроводные двигатели подключены, как показано. Мы не будем использовать два общих провода, но в остальном они идентичны четырехпроводной версии.
У восьмипроводных двигателей есть два общих провода для каждой из этих катушек, которые не соединяются. Это делит его на четыре электрически отдельных катушки. Если у вас нет таблицы, это может усложнить задачу. Определить, что это за пары, довольно просто, но определить, какие две пары полукатушек и какие из них, и получить правильную полярность, может быть непросто.
Методы и процедуры
Так как же определить, какой провод какой? Вот вам процесс.
Примечание по концевым упорам : некоторые прошивки Reprap (например, Marlin) будут искать концевые упоры для подключения во время тестирования проводки двигателя, как указано выше. В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но не в другом (поскольку он думает, что сработал конечный останов). Если ваша прошивка позволяет отключать концевые ограничители, вам следует сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он плавно перемещается в каждом направлении.
В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но не в другом (поскольку он думает, что сработал конечный останов). Если ваша прошивка позволяет отключать концевые ограничители, вам следует сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он плавно перемещается в каждом направлении.
«пара» проводов на 4-проводных двигателях
Речь идет о поиске двух пар проводов, которые подключены к каждой из двух катушек.
- Метод с омметром
- Просто измерьте сопротивление пары проводов. Если сопротивление составляет всего несколько Ом (<100 Ом), вы нашли пару. Два других провода должны составлять вторую пару.
- Методы без омметра
- Сначала попробуйте повернуть двигатель пальцами и обратите внимание на то, насколько это сложно.Затем склейте провода попарно. Если мотор начинает работать заметно сильнее, значит, вы нашли пару.
- Другой метод — использовать светодиод, поднести любые два провода к концам светодиода и повернуть двигатель (вращать в обоих направлениях), светодиод загорится, если провода парные, меняйте местами провода, пока не зажжете ВЕЛ.
- Метод проб и ошибок
- (Воспроизведено из этого руководства с любезного разрешения Rustle Laidman на StepperWorld.com.)
- Подключите 4 провода катушки к контроллеру любым способом.Если сначала это не сработает, вам нужно всего лишь попробовать эти 2 обмена:
| Имя | А | B | С | D |
|---|---|---|---|---|
| Произвольный первый порядок подключения | 1 | 2 | 4 | 8 |
| Концевая пара переключателя | 1 | 2 | 8 | 4 |
| Средняя пара переключателя | 1 | 8 | 2 | 4 |
- Все готово, когда двигатель плавно вращается в любом направлении. Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).
 Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).
Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).- Эта процедура не всегда работает в два этапа (например, если в вашей настройке необходимо, чтобы «1» совпало с «4»). Поменять местами 2-й на 4-й, затем 2-й на 3-й будет более надежным.
«пара» проводов на 6-проводных двигателях
На шестипроводных двигателях вы найдете две группы по три провода, в которых все три провода электрически соединены друг с другом.Эти провода подключены к одной катушке: один в центре катушки, два на концах. Соответственно, две из возможных пар имеют меньшее сопротивление, одна пара — большее. Возьмите пару с более высоким сопротивлением и проигнорируйте третий провод.
Здесь тоже может работать безомметр. Ожидайте не две, а три стадии разворачивающего сопротивления. Вам нужны две пары, которые дают наибольшее сопротивление повороту.
После того, как вы выяснили, какие два из шести проводов игнорировать (по одному в каждой группе), вы можете действовать, как если бы у вас были четырехпроводные двигатели.
спичечные катушки для 8-проводных шаговых двигателей
Если у вас 8-проводный шаговый двигатель, у вас будет 4 катушки. Вам необходимо определить, какие пары катушек «одинаковые». Есть две «пары», которые по сути одинаковы. Вы хотите соединить эти две пары последовательно, чтобы у вас было только две катушки, каждая в два раза длиннее. Их также необходимо соединить так, чтобы две катушки «складывались» друг с другом — полярность имеет значение.
Самый простой способ — найти техническое описание. В то время как другие типы шаговых двигателей упрощают определение правильных катушек, вероятно, будет проще и быстрее прочитать техническое описание 8-проводных двигателей.
Если вы не можете найти таблицу, еще не все потеряно. Выберите наугад две катушки, подключите их и посмотрите, работает ли. Если он поворачивается, у вас есть две катушки, которые не являются половинами одной катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока вы не определите не только, какие две катушки какие, но и каким образом они должны быть подключены. Подумайте об этом, это просто, но несколько запутанно. Поскольку нас не волнует, в каком направлении поворачивается шаговый двигатель, мы можем исключить множество возможностей и просто задать себе простой вопрос «он поворачивается?».
Если он поворачивается, у вас есть две катушки, которые не являются половинами одной катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока вы не определите не только, какие две катушки какие, но и каким образом они должны быть подключены. Подумайте об этом, это просто, но несколько запутанно. Поскольку нас не волнует, в каком направлении поворачивается шаговый двигатель, мы можем исключить множество возможностей и просто задать себе простой вопрос «он поворачивается?».
Подключите его к шаговому драйверу
Полярность каждой катушки не имеет значения, как и какая катушка. Поэтому убедитесь, что провода каждой катушки соединены с одной или другой стороны вилки, и подключите ее.
На самом деле имеет значение, какая катушка какая и какова полярность катушек, но если они ошибаются, двигатель просто вращается не в ту сторону, что легко исправить. Помните следующее:
- Изменение полярности любой (одной) катушки изменит направление шагового двигателя на противоположное.
- Перестановка катушек изменит направление шагового двигателя на противоположное.
- В прошивке можно изменить направление шага.
- Вставка вилки в обратном направлении меняет местами катушки и меняет местами как катушку A, так и катушку B. Таким образом, эффект состоит в изменении направления 3 раза, что дает общий эффект, такой же, как изменение направления один раз.

Простейшее решение проблемы неправильного поворота шагового двигателя — перевернуть штекер, если вы не скомпилировали собственную прошивку и уже не знаете, как изменить направление в прошивке.
Дополнительная литература
- StepperMotor содержит список известных работающих шаговых двигателей, список известных работающих драйверов шаговых двигателей и еще несколько советов.
- NEMA Motor описывает стандарты NEMA для шаговых двигателей — в частности, что означает «NEMA 17».
Электропроводка
Биполярный и униполярный шаговый двигатель
Биполярный шаговый двигатель обычно имеет четыре выхода. В отличие от униполярных шаговых двигателей, биполярные шаговые двигатели не имеют общего центрального соединения. Вместо этого у них есть два независимых набора катушек. Вы можете отличить их от униполярных шаговых двигателей, измерив сопротивление между проводами. Вы должны найти две пары проводов с одинаковым сопротивлением. Если у вас есть выводы вашего измерителя, подключенные к двум проводам, которые не подключены (т. Е. Не подключены к одной катушке), вы должны увидеть бесконечное сопротивление (или отсутствие непрерывности).
В отличие от униполярных шаговых двигателей, биполярные шаговые двигатели не имеют общего центрального соединения. Вместо этого у них есть два независимых набора катушек. Вы можете отличить их от униполярных шаговых двигателей, измерив сопротивление между проводами. Вы должны найти две пары проводов с одинаковым сопротивлением. Если у вас есть выводы вашего измерителя, подключенные к двум проводам, которые не подключены (т. Е. Не подключены к одной катушке), вы должны увидеть бесконечное сопротивление (или отсутствие непрерывности).
Самый простой способ подключения униполярного шагового двигателя к Arduino — это использовать переход для микросхемы транзисторной матрицы ULN2003A.ULN2003A содержит семь транзисторных драйверов Дарлингтона и чем-то напоминает семь транзисторов TIP120 в одном корпусе. ULN2003A может передавать до 500 мА на канал и имеет внутреннее падение напряжения около 1 В. Он также содержит внутренние фиксирующие диоды для рассеивания скачков напряжения при возбуждении индуктивных нагрузок.
