Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
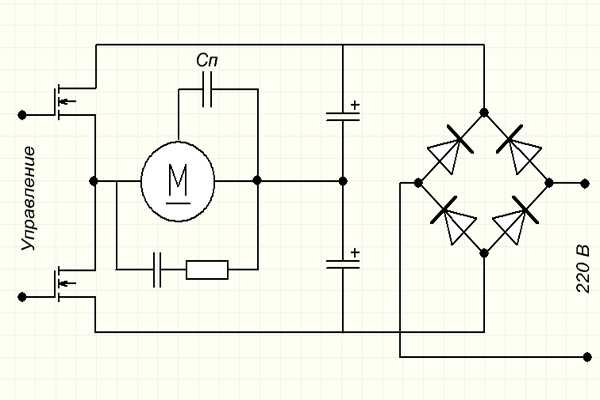
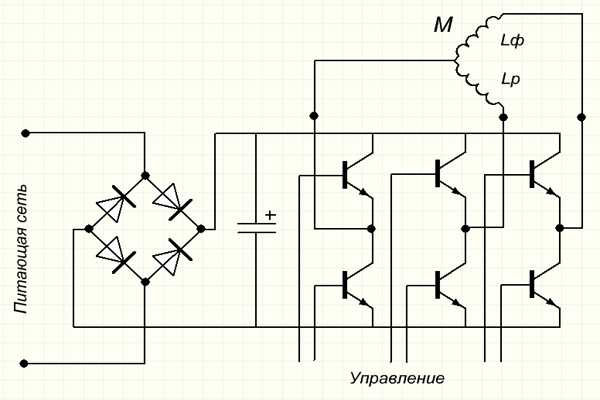
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое «вечернее» видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Способы управления однофазным асинхронным двигателем
Асинхронные электродвигатели с короткозамкнутым ротором сегодня достаточно распространены. Это объясняется отсутствием щеточного узла, ротор асинхронных двигателей изготавливается из алюминия и технологически прост в изготовлении, и как следствие, конструкция асинхронного двигателя очень надежна.
 Самым распространенным из всех типов асинхронных двигателей является однофазный электродвигатель с двумя статорными обмотками. Первая и вторая статорные обмотки идентичны по количеству витков, но последовательно одной обмотке включен конденсатор, обеспечивающий сдвиг фаз между обмотками для образования вращающегося магнитного поля статора.
Самым распространенным из всех типов асинхронных двигателей является однофазный электродвигатель с двумя статорными обмотками. Первая и вторая статорные обмотки идентичны по количеству витков, но последовательно одной обмотке включен конденсатор, обеспечивающий сдвиг фаз между обмотками для образования вращающегося магнитного поля статора.
Способы управления однофазными асинхронными электродвигателями.
1) Частотный способ управления однофазным асинхронным двигателем
Основным способом управления однофазным асинхронным двигателем является частотный. Частотный способ управления однофазным асинхронным двигателем реализуется посредством специальных устройств — ШИМ-инверторов. В свою очередь ШИМ-инверторы различают однофазные и трехфазные, что определяется количеством пар силовых выходов для управления обмотками двигателя. Управление однофазным двигателем может быть организовано как посредством однофазного, так и трехфазного инвертора.
Управление однофазным асинхронным электродвигателем посредством однофазного ШИМ-инвертора
По такой схеме обе обмотки асинхронного двигателя включены параллельно. Два выхода инвертора подключаются к точкам соединения обмоток. Посредством инвертора формируется напряжение с изменяемой частотой и линейной зависимостью напряжения от частоты. Регулировка частоты возможна как вниз, так и вверх. Диапазон регулировки частоты обычно не превышает 1:10, поскольку емкость конденсатора в одной из обмоток прямо зависит от частоты.
Достоинства: простота ввода в эксплуатацию, отсутствие необходимости переделки конструкции двигателя; надежность работы, поскольку частотный преобразователь разработан специально для управления однофазными асинхронными двигателями; полезный функционал (ПИД-регулятор, защитные функции, низкий пусковой ток и др.)
Недостатки: только однонаправленное вращение; достаточно высокая стоимость и редкость однофазных преобразователей частоты в сравнении с трехфазными.
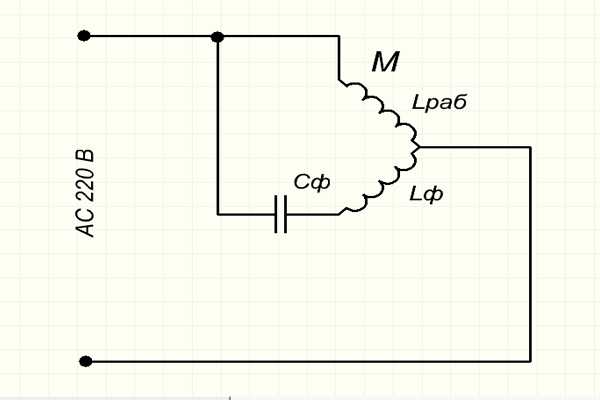
Управление однофазным асинхронным электродвигателем посредством трехфазного ШИМ-инвертора
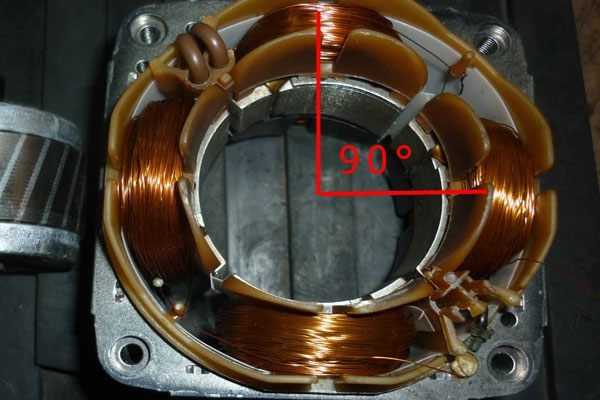
В такой схеме обмотки однофазного электродвигателя включают последовательно. Выходы трехфазного преобразователя подключают к средней точке и к концам обмоток электрического двигателя. Конденсатор из такой схемы управления исключается (необходима определенная переделка двигателя). Вследствие сдвига обмоток двигателя на 90 градусов и сдвига фаз на 120 градусов инвертором, получаемое магнитное поле идеально круговым не получится, что скажется отрицательно на параметрах регулирования частоты оборотов однофазного асинхронного двигателя.
Магнитное поле получается пульсирующим. Поскольку порядок коммутации выводов инвертора может меняться программным путем, изменения чередования напряжений на обмотках добиться достаточно просто, следовательно, просто и менять направление вращения ротора асинхронного двигателя.
Достоинства: доступность на рынке промышленной автоматизации и сравнительно низкая цена; возможность реверсивной работы асинхронного двигателя; более широкий диапазон регулировки, чем у однофазного преобразователя; более широкие возможности программируемых функций, чем у однофазных инверторов.
Недостатки: пульсирующий и пониженный момент однофазного электродвигателя; повышенный нагрев асинхронных однофазных двигателей в такой схеме; не все стандартные преобразователи (ШИМ-инвертора) могут применяться в такой схеме.
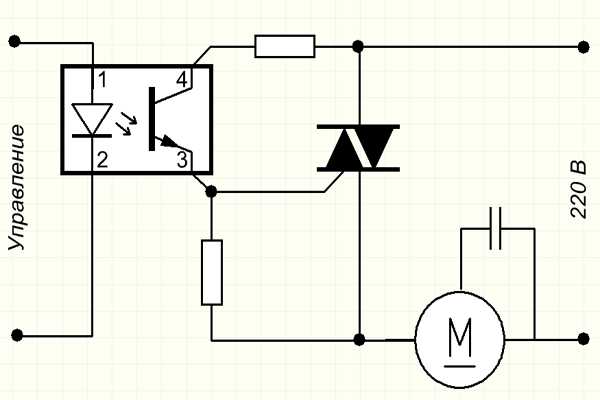
2) Фазовое управление однофазным асинхронным электродвигателем посредством симисторного регулятора (диммера)
Данный метод является самым «древним» и обусловлен отсутствием до недавнего времени в широкой продаже частотных регуляторов однофазных асинхронных электродвигателей и их относительно высокой ценой. При управлении посредством симисторного регулятора обмотки двигателя остаются включенными стандартным способом. Симисторный регулятор подключается к точкам параллельного соединения обмоток.
На выходе симисторного регулятора (диммера) формируется однофазное напряжение постоянной частоты (50 Гц) и среднеквадратическим регулируемым значением. Это происходит вследствие регулирования напряжения открывания симистора (изменение времени открытого состояния симистора в течение периода изменения синусоиды сетевого напряжения).
В такой схеме момент на валу электрического двигателя снижается пропорционально напряжению, а критическое скольжение остается неизменным.
Достоинства: исключительная простота симисторного устройства управления; возможность ремонта симисторного регулятора (диммера) любым радиолюбителем; на порядок более низкая цена симисторного регулятора (диммера) по сравнению с частотными приводами.
Недостатки: регулирование оборотов только в сторону уменьшения; диапазон регулирования оборотов только 2:1; стабильность скорости при применении симисторного регулятора (диммера) удовлетворительная; допустимая нагрузка электродвигателя существенно снижается с уменьшением скорости; применение симисторного регулятора (диммера) вызывает перегрев двигателя на низких скоростях, поскольку производительности встроенного вентилятора двигателя не хватает; необходимость завышения мощности двигателя.
Исходя из сказанного выше, для управления асинхронными двигателями настоятельно рекомендуемо применение частотных приводов. Частотные приводы (ШИМ-инверторы) кроме несомненных удобств при управлении, дают возможность получить высокий КПД электродвигателей и добиться роста коэффициента мощности (cosφ) до 0.98, т.е. реализации программы энергосбережения.
Электрические машиныengineering.ua
Схема управления трехфазным асинхронным двигателем
Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.

Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок “пуск” и “стоп”,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.
При нажатии на кнопку SB2 “Пуск” на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N). Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке “Пуск”. Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки “Пуск” катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют “толчковым”. Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 “Стоп”. При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку “Стоп” и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 “Пуск”. Таким образом, магнитный пускатель обеспечивает т.н. “нулевую защиту”. Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь – защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы – A. B. С, а при включении пускателя KM2 – порядок фаз меняется на С, B. A.
Схема показана на рис. 2.

Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1. При необходимости смены направления вращения необходимо нажать на кнопку SB1 “Стоп”, двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку “Стоп”.
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок “Пуск” SB2 – SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки “Пуск” включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 “Стоп” включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 – нормально-закрытый (размыкающий) контакт, в цепи КМ3 – кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 – нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку “Стоп”, что очень удобно. Кнопка “Стоп” нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B. Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Статьи и схемы
Полезное для электрика
Главная » Статьи » Схема управления асинхронными трехфазными двигателями
Схема управления асинхронными трехфазными двигателями
Любой домашний мастер, необязательно хороший электрик, в своем арсенале имеет много универсальных станков и инструментов, использует электрические приборы, работающие от асинхронных двигателей, которыми можно пользоваться на расстоянии в автоматическом режиме.
Местное управление трехфазным двигателем
Рассмотрим на примере 3-х фазной системы алгоритм управления электродвигателем, по которому работает электрическая схема.
От электрического распред щитка мастерской, оборудованного вводными автоматами и рубильниками, посредством силового трехжильного кабеля подводится напряжение на силовые контакты ПМ 13 магнитного пускателя через подключенные токовые обмотки реле ТП.
Все провода фаз необходимо подбирать с учетом передаваемой мощности, которая вызывает нагрев металла. Для наглядности восприятия схемы фазы выделены разными цветами.
Разрывную способность контактов у пускателя следует сочетать с учетом электрической мощности двигателя под максимальной нагрузкой. Эти данные указываются в паспортах на электрическое оборудование и информационных табличках, прикрепленных к корпусу.
Состав приборов и их назначение
Обычная схема управления использует электрические приборы:
• магнитный пускатель;
• токовое тепловое реле класса РТЛ;
• две раздельные либо сдвоенные кнопки с обязательной пружинной конструкцией самовозврата.
Для защиты электродвигателя от перегрузок по току и/или исключения перегрева провода обмоток в силовую цепь через контактные зажимы КРЛ-клеммника подключаются токовые обмотки теплового реле ТП. Диэлектрический прочный корпус устройства прикрепляется непосредственно к магнитному пускателю либо — на Din-рейку. Предусмотрен также старый метод установки “под винт”.
Выпускаемые современные полупроводниковые тепловые реле снабжаются дополнительно такими функциями защиты, как:
• нарушения симметрий токов между фазами, которые создают неравномерную нагрузку на обмотки;
• пропадания напряжения в любой из фаз.
Электрическая схема рассматриваемых твердотельных реле способна выдержать напряжение 600 вольт. У нее реализована возможность регулирования токов несрабатывания защиты для учета мощности применяемого двигателя на номинальные токи в 10, 16 и более ампер.
Алгоритм управления
На схему управления подводится напряжение от одной из фаз и нуля. Нормально замкнутый контакт ТП-1 у теплового реле РТЛ в обычном режиме разрешает работу магнитному пускателю и, соответственно, электродвигателю. Размыкание контакта ТП-1 приводит к обесточиванию обмотки ПМ и отключению контактов ПМ-13, останову электродвигателя.
Запуск схемы происходит замыканием контакта Кн1 от нажатия кнопки “Пуск”, которая подает напряжение на обмотку ПМ. Срабатывающий пускатель замыкает одновременно свои силовые контакты ПМ-13, а в схеме управления его контакт ПМ-4 подключает на удержание обмотку пускателя ПМ. Таким образом предотвращается разрыв цепи обмотки пускателя от действия пружины самовозвратного контакта Кн1.
Двигатель будет работать до разрыва цепи управления одним из способов:
• нажатием кнопки “Стоп”;
• защитным отключением от токового реле перегрузки.
Дистанционное управление трехфазным двигателем
Многим двигателям, установленным на станках, достаточно местного управления. Но отдельным устройствам, наподобие погружных насосов, требуется дистанционное управление, иногда даже с разных мест.
Для этого в электрическую схему управления двигателя достаточно добавить еще одну сдвоенную кнопку (Пуск-д, Стоп-д). Ее следует смонтировать на удаленном рабочем месте и подключить отдельным кабелем или проводами в защитном кожухе.
Контакты “Кн1д” соединяются жилами кабеля по параллельной схеме с одноименными контактами Кн1, а нормально замкнутый контакт “Стоп-д” врезается последовательно с Кн2.
Для этого жилы кабеля на удаленном рабочем месте подсоединяются к кнопке Кн2д и подводятся к кнопке “Стоп”. С любого контакта Кн2 отключают провод от действующей схемы и подключают его (желательно через клеммник) с одним из кончиков кабеля от кнопки дистанционного останова Кн2д. Второй кончик от удаленной кнопки подключают на освободившийся контакт Кн2.
Особенности управления однофазным двигателем
Описанные выше алгоритмы полностью пригодны для работы однофазных устройств. Электрическая схема для их управления упрощается: напряжение к электродвигателю подключается однофазным пускателем через обмотку однофазного токового реле.
Отправить заявку или сообщение Вы можете черезформу обратной связи , или позвонить +7 (495) 545-44-32.
Другие новости по теме:
Электротехническая промышленность – ведущая отрасль народного хозяйства. Продукция электротехнической промышленности используется почти во всех промышленных установках, поэтому качество электротехнических изделий во многом определяет технический уровень продукции других отраслей.
Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов, используемых во всех отраслях народного хозяйства.
Принцип действия асинхронного двигателя основан на создании вращающегося магнитного поля при питании обмотки статора трехфазным током. Если скорость ротора меньше скорости вращения магнитного поля, то силовые линии вращающегося магнитного поля будут пересекать проводники обмотки ротора и индуктировать в них ЭДС. Поскольку обмотка ротора замкнута, то в проводниках будут протекать токи. На проводники с током, находящиеся в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усилие, приложенное ко всем проводникам ротора, образует электромагнитный момент, который увлекает ротор за вращающимся магнитным полем. Но этот момент возникает только тогда, когда скорость ротора не равна скорости вращения поля, т. е. синхронной скорости. Поэтому машина называется асинхронной, что означает «несинхронная».
Управление асинхронными двигателями
Принцип работы схемы управления асинхронным двигателем с к.з. ротором с одного места включения
Схему можно условно разделить на силовую – это то что находится слева, и на схему управления – это то что находиться справа. Для начала на всю электрическую цепь нужно подать напряжение путём включения автомата QF. И напряжение подаются на неподвижные контакты пускателя и на цепь управления. Далее нажимаем кнопку пуска SB2, при этом действии напряжение подается на катушку пускателя и он втягивается и подаётся также напряжение на обмотки статора и электродвигатель начинает вращаться. Одновременно с силовыми контактами на пускателе замыкаются и блок-контакты КМ через которые подаётся напряжение на катушку пускателя и кнопку SB2 можно отпустить. На этом запуска уже окончен.
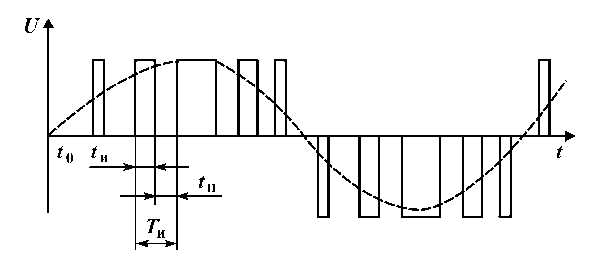
Рис.1 Схема управления асинхронным двигателем с к.з. ротором
Для того чтобы прекратить работу электродвигателя нужно нажать на кнопку SB1. Этим действием мы разрываем цепь управления и прекращается подача напряжения на катушку пускателя, и силовые контакты размыкаются и как следствие пропадает напряжение на обмотках статора, и он останавливается.
Принцип работы схемы реверсивного управления асинхронным двигателем с к.з. ротором с выдержкой времени
Реверсирование двигателя выполняется двумя контакторами и трёхкнопочной станцией, следующим образом. При срабатывании контактора КМ1 к обмоткам двигателя подаётся напряжение сети с прямым порядком чередования фаз (А-В-С). Если сработает контактор КМ2, то порядок чередование фаз обратный(С-В-А).

Рис.2 Схема реверсивного управления асинхронным двигателем с к.з. ротором с выдержкой времени
Дистанционный пуск и остановку выполняют реверсивным электромагнитным пускателем (КМ), снабженным электротепловым реле (КК) для защиты его от перегрузок. Управление электродвигателем осуществляется кнопками«ВПЕРЁД», «НАЗАД»,«СТОП».
Пуск электродвигателя вперёд осуществляется следующим образом. При нажатии SBC1.1(кнопка «ВПЕРЁД»с замыкающим контактом) образуется замкнутая электрическая цепь: фаза А-размыкающий контакт SBT(кнопка «СТОП») размыкающий контакт SBC2.2(кнопка«НАЗАД»), замыкающий контакт SBC1.1, катушка электромагнитного пускателя КМ1, размыкающий контакт электротеплового реле КК-фаза В.
В электромагните КМ1 создаётся магнитное поле. Якорь, притягиваясь к сердечнику, увлекает траверсу, на которой закреплены подвижные главные и блокировочные контакты. Силовые контакты КМ1 замыкают цепь главного тока, обеспечивая запуск двигателя вперёд, а блокировочный замыкающий контакт КМ 1.1 шунтирует кнопку «ВПЕРЁД», так как она с пружинным самовозвратом и замкнута лишь на нажатии.
Пуск электродвигателя назад осуществляется следующим образом. При нажатии SBC2.1 (кнопка «НАЗАД» с замыкающим контактом) образуется замкнутая электрическая цепь: фаза А-размыкающий контакт SBT (кнопка «СТОП» ), размыкающий контакт SBC 1.2(кнопка «ВПЕРЁД»), замыкающий контакт SBC 2.1 размыкающий блокировочный контакт магнитного пускателя KM 2.2, катушка реле времени KT, нулевой провод сети N, при этом замкнётся контакт реле времени KT 1.1 через определённый промежуток времени, который выставляется на шкале реле, при помощи указателя неподвижных контактов замкнётся подвижный контакт с самовозвратом КТ1.2, катушка электромагнитного пускателя КМ2, размыкающий контакт электротеплового реле КК-фаза В. Т.о. сработает контактор КМ2, в силовой цепи замкнутся главные контакты КМ2.1 шунтирует кнопку «НАЗАД»(контакт SBC2.1 и контакт с выдержкой времени КТ1.2).
Для остановки электродвигателя следует нажать кнопку SBTс размыкающим контактом («СТОП»). При этом обесточивается катушка КМ, главные контакты электромагнитного пускателя разомкнутся и отключается электродвигатель.
Защита электродвигателя от перегрузок осуществляется тепловым реле КК, которое работает нижеописанным способом. При превышении заданного значения электрического тока в цепи питания электродвигателя сработает тепловое реле КК и своим размыкающим контактом разомкнёт цепь питания катушки электромагнитного пускателя, что в свою очередь приведёт к размыканию его главных контактов и электродвигатель отключается.
асинхронный двигатель ротор реверсный
Схема включения асинхронного двигателя с фазным ротором

Рис. 3. Схема пуска асинхронного двигателя с фазным ротором
Используя схему асинхронного двигателя (рис. ) рассмотрим запуск в две ступени который проводится с использованием релейно-контакторной аппаратуры. Одновременно напряжение подается как на силовые цепи, так и на управляющие – замыкается выключатель QF. При подаче напряжения реле времени (обозначены КТ1 и КТ2) в цепи управления срабатывают, размыкая свои контакты. После нажатия кнопки запуска (SB1) срабатывает контактор КМ3 и запускается двигатель с резисторами, которые введены в цепь ротора – в этот момент на контакторах КМ1 и КМ2 питания нет. При подключении контактора КМЗ, из-за потери питания, в цепи контактора КМ1 реле КТ1 замыкает контакт через интервал времени, заданный задержкой времени в реле КТ1. По истечению времени (двигатель разгоняется, ток ротора начинает падать) происходит включение контактора КМ1 – происходит шунтирование первой пусковой ступени резисторов. Ток снова возрастает. но по мере разгона его значение начинает уменьшаться. Одновременно с этим в цепи происходит размыкание реле КТ2, оно теряет питание и с выставленной выдержкой происходит замыкание контакта в цепи контактора КМ2. Происходит шунтирование второй ступени резисторов, включенных в цепь ротора. Двигатель работает в штатном режиме.
Источники: http://electricalschool.info/main/electroshemy/1511-tri-naibolee-populjarnye-skhemy.html, http://elmashcentr.ru/35-shema-upravleniya-asinhronnymi-trehfaznymi-dvigatelyami.html, http://studbooks.net/1420420/tovarovedenie/upravlenie_asinhronnymi_dvigatelyami
electricremont.ru
Управление асинхронным двигателем. Наиболее популярные схемы.

Здравствуйте, дорогие читатели! Сегодня поговорим про управление асинхронным двигателем, а так же рассмотрим три простые схемы, которые применяются наиболее часто.
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Асинхронный двигатель с короткозамкнутым ротором
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Электромагнитный пускатель
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Управление асинхронным двигателем с помощью одного магнитного пускателя
Схема показана на рисунке.

Управление асинхронным двигателем с помощью магнитного пускателя
При нажатии на кнопку SB2 «Пуск» катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем (N). Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A, B, С, а при включении пускателя KM2 — порядок фаз меняется на С, B, A.
Схема показана на рис. 2.

Управление асинхронным двигателем с помощью двух магнитных пускателей
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1. При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
Управление асинхронным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B. Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Смотрите также по этой теме:
Короткозамкнутый и фазный ротор. В чем различие?
Асинхронный двигатель. Устройство и принцип работы.
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Принцип работы электродвигателя. Простыми словами о сложном.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
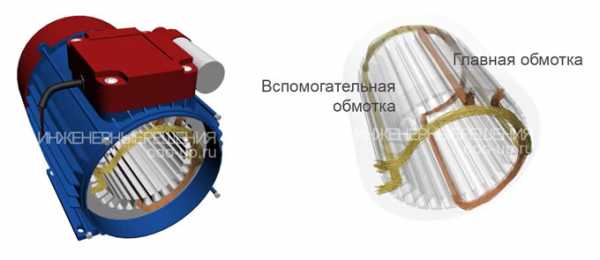
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.
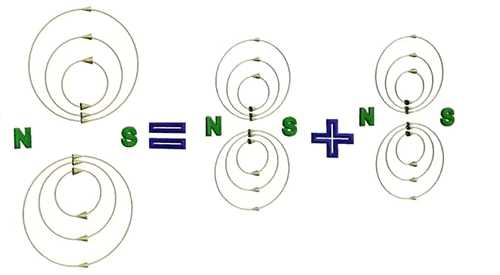
Проанализируем случай с двумя обмотками имеющими по оному витку
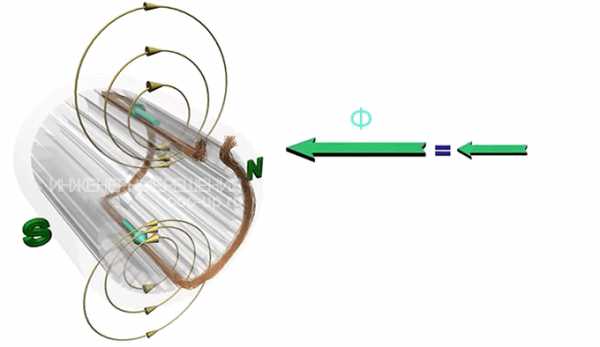
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить

Остановить

Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
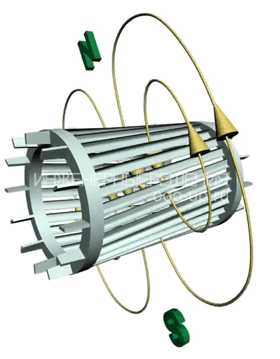
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя

Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
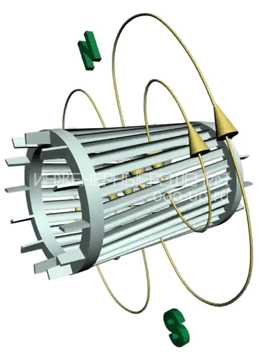
Вращающееся магнитное поле пронизывающее ротор

Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц

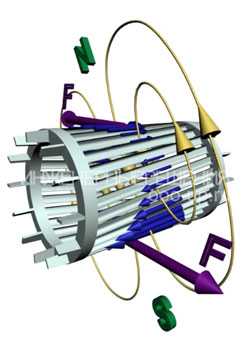
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
С помощью одной фазы нельзя запустить ротор

Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.

Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
engineering-solutions.ru
Управление оборотами асинхронного двигателя 220в. Регулировка оборотов асинхронного двигателя
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
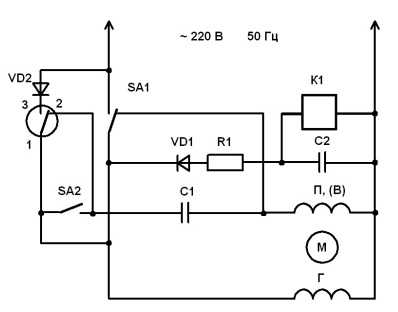
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
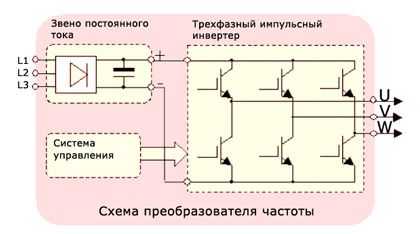
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигател
sibay-rb.ru
Несколько способов управления однофазным асинхронным двигателем
Новости
24 марта 2011, 15:38
Несколько способов управления однофазным асинхронным двигателем
Достоинства и недостатки различных способов управления асинхронными двигателями. Выводы, сделанные по опыту практического применения.
В настоящее время получили большое распространение асинхронные электродвигатели с короткозамкнутым ротором. Это вызвано тем, что такие машины не имеют щеточного узла, их ротор сделан из алюминия и технологически очень прост, а значит, сама конструкция получается очень надежной. Рассмотрим несколько способов управления однофазным асинхронным электродвигателем.
Конденсаторный однофазный электродвигатель
Наиболее распространенным типом асинхронного однофазного электродвигателя является двигатель с двумя статорными обмотками. Первая и вторая обмотки идентичны по количеству витков, но последовательно с одной из обмоток включают конденсатор. Конденсатор обеспечивает сдвиг фаз между обмотками для образования вращающегося магнитного поля для ротора.
Частотный способ управления
Основным способом управления таким двигателем, применяемым в настоящее время, является частотный способ. Этот способ реализуется с помощью специальных приборов, называемых ШИМ инверторами. Эти инверторы, в свою очередь, бывают однофазными и трехфазными, что определяется количеством пар силовых выходов для управления обмотками двигателя. Для управления однофазным двигателем может быть применен как однофазный, так и трехфазный инвертор.
Управление однофазным ШИМ инвертором
При таком управлении обе обмотки двигателя включены параллельно. Два выхода инвертора подключаются к точкам соединения обмоток. Инвертор формирует напряжение с варируемой частотой и с линейной зависимостью напряжение к частоте. Регулировать частоту можно как вниз, так и вверх. Диапазон регулировки обычно не превышает 1:10, т.к. емкость конденсатора в одной из обмоток напрямую зависит от частоты.
Достоинства
Основные достоинства этого метода – это простота ввода в эксплуатацию, не требующая переделки конструкции двигателя; надежная работа, т.к. частотный преобразователь специально разработан для управления такими типами двигателей; хорошие характеристики ( ПИД-регулятор, предустановленные скорости, низкий пусковой ток, защитные функции и т.д.)
Недостатки
К недостаткам относятся: только однонаправленное вращение; более высокая стоимость и дефицит однофазных преобразователей по сравнению с трехфазными, по причине их малого выпуска.
Управление трехфазным ШИМ инвертором
В данном случае обмотки двигателя включают последовательно. Выходы трехфазного преобразователя подключают к средней точке и к концам обмоток электродвигателя. Конденсатор при этом из схемы исключают (требуется некоторая переделка двигателя) Так как обмотки двигателя сдвинуты на 90 градусов, а инвертор дает сдвиг фаз на 120 градусов, то поле не будет идеально круговым и это отрицательно скажется на параметрах регулирования.
Поле будет пульсирующим. Так как порядок коммутации выводов инвертора можно менять программным путем, то легко добиться изменения чередования напряжений на обмотках, следовательно, менять направление вращения ротора двигателя.
Достоинства
К достоинствам следует отнести: доступность на рынке и сравнительно низкую цену; возможность реверсивной работы обычного нереверсивного двигателя; более широкий, чем у однофазного преобразователя диапазон регулировки; возможности программируемых функций как у однофазного инвертора или даже шире за счет большего количества коммутируемых выходов.
Недостатки
Недостатки это: пониженный и пульсирующий момент однофазного двигателя; повышенный его нагрев; не все стандартные преобразователи готовы для такой работы, т.к. некоторые производители прямо запрещают использовать свои изделия в таком режиме.
Фазовое управление с помощью симисторного регулятора ( диммера)
Этот метод самый «древний», он обусловлен отсутствием до недавнего времени в широкой продаже частотных регуляторов и их относительно высокой ценой. При таком управлении обмотки двигателя остаются включенными параллельно. Одна из обмоток включена последовательно с фазосдвигающим конденсатором. К точкам параллельного соединения обмоток подключается симисторный регулятор.
На выходе этого регулятора формируется однофазное напряжение с постоянной частотой (50 Гц) и регулируемым среднеквадратическим значением. Это происходит за счет регулирования напряжения открывания симистора, т.е. изменяется время открытого состояния симистора за период следования сетевого напряжения.
Момент на валу двигателя, при таком регулировании, будет снижаться пропорционально напряжению, критическое скольжение будет неизменным.
Достоинства
Основные достоинства: исключительная простота устройства управления; возможность собрать и починить такое устройство любым радиолюбителем; на порядок или даже несколько порядков более низкая цена по сравнению с частотными приводами.
Недостатки
Основные недостатки это: регулирование оборотов только на понижение; диапазон регулирования только 2:1; стабильность скорости только удовлетворительная; допустимая нагрузка резко снижается с уменьшением скорости; перегрев двигателя на низких скоростях, т.к. не хватает производительности встроенного вентилятора двигателя; необходимость завышения мощности двигателя.
Выводы
Исходя из всего вышеперечисленного, необходимо настоятельно рекомендовать применение частотных приводов для управления асинхронными двигателями. Такие приводы (ШИМ инверторы) кроме несомненных удобств по управлению, позволяют получить высокий КПД установок и добиться роста коэффициента мощности (cos фи) до 0.98, т.е. реализовать программу энергосбережения.
Яков Кузнецов
Читайте самые интересные истории ЭлектроВестей в Telegram и Viber
elektrovesti.net
