Управление асинхронным двигателем. Наиболее популярные схемы.

Здравствуйте, дорогие читатели! Сегодня поговорим про управление асинхронным двигателем, а так же рассмотрим три простые схемы, которые применяются наиболее часто.
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.

Асинхронный двигатель с короткозамкнутым ротором
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.

Электромагнитный пускатель
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Управление асинхронным двигателем с помощью одного магнитного пускателя
Схема показана на рисунке.

Управление асинхронным двигателем с помощью магнитного пускателя
При нажатии на кнопку SB2 «Пуск» катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем (N). Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A, B, С, а при включении пускателя KM2 — порядок фаз меняется на С, B, A.
Схема показана на рис. 2.

Управление асинхронным двигателем с помощью двух магнитных пускателей
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1. При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.

Управление асинхронным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B. Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Смотрите также по этой теме:
Короткозамкнутый и фазный ротор. В чем различие?
Асинхронный двигатель. Устройство и принцип работы.
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Принцип работы электродвигателя. Простыми словами о сложном.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Векторное и скалярное управление асинхронным двигателем (видео)
Электропривод сегодня является основой большинства подъемно-транспортных, обрабатывающих комплексов. Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.

Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.

Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:

Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление частотными контроллерами
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.

Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
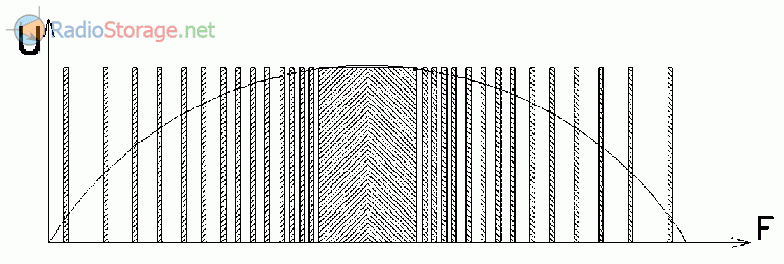
Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400…1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM — англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.
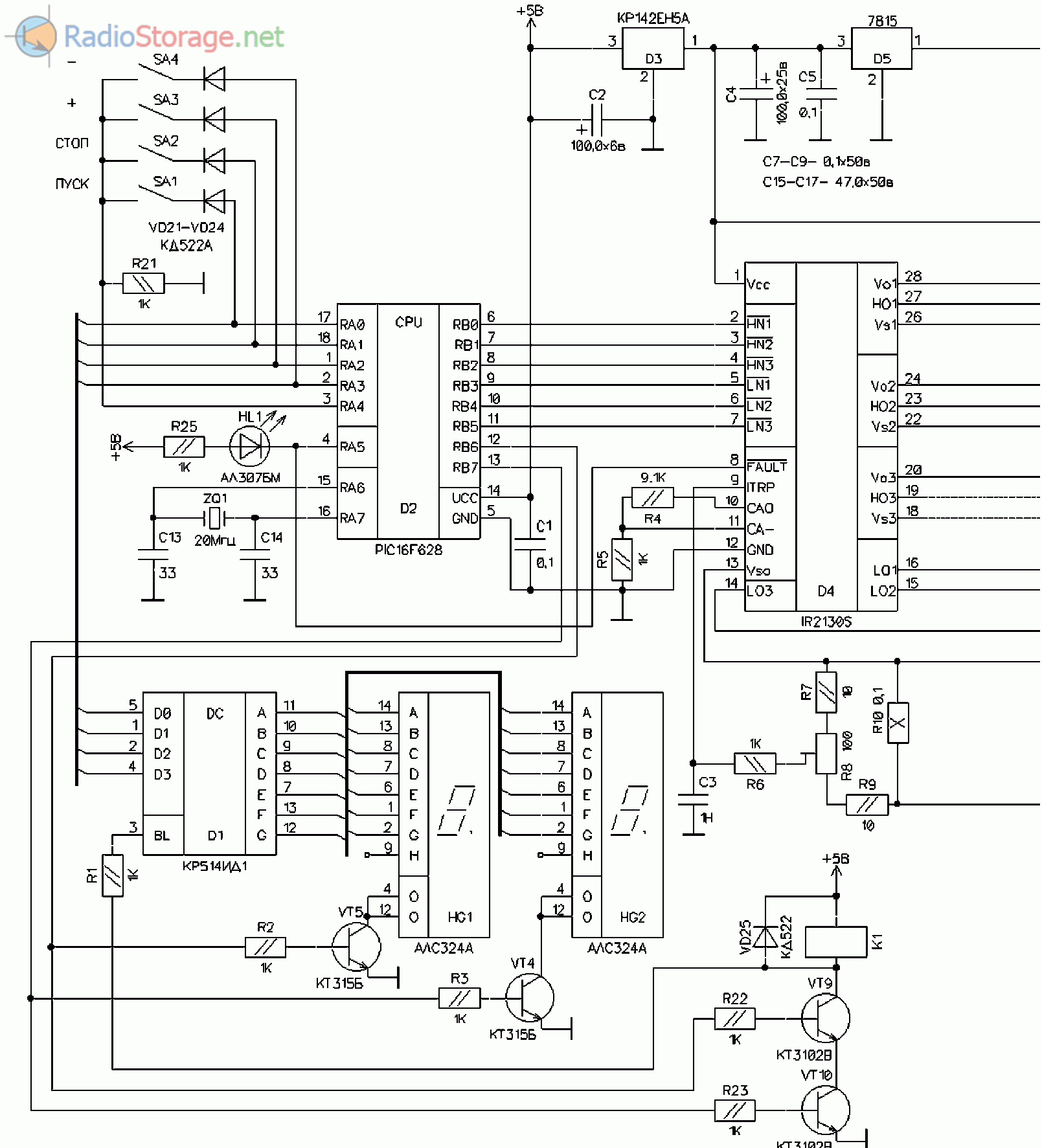
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.
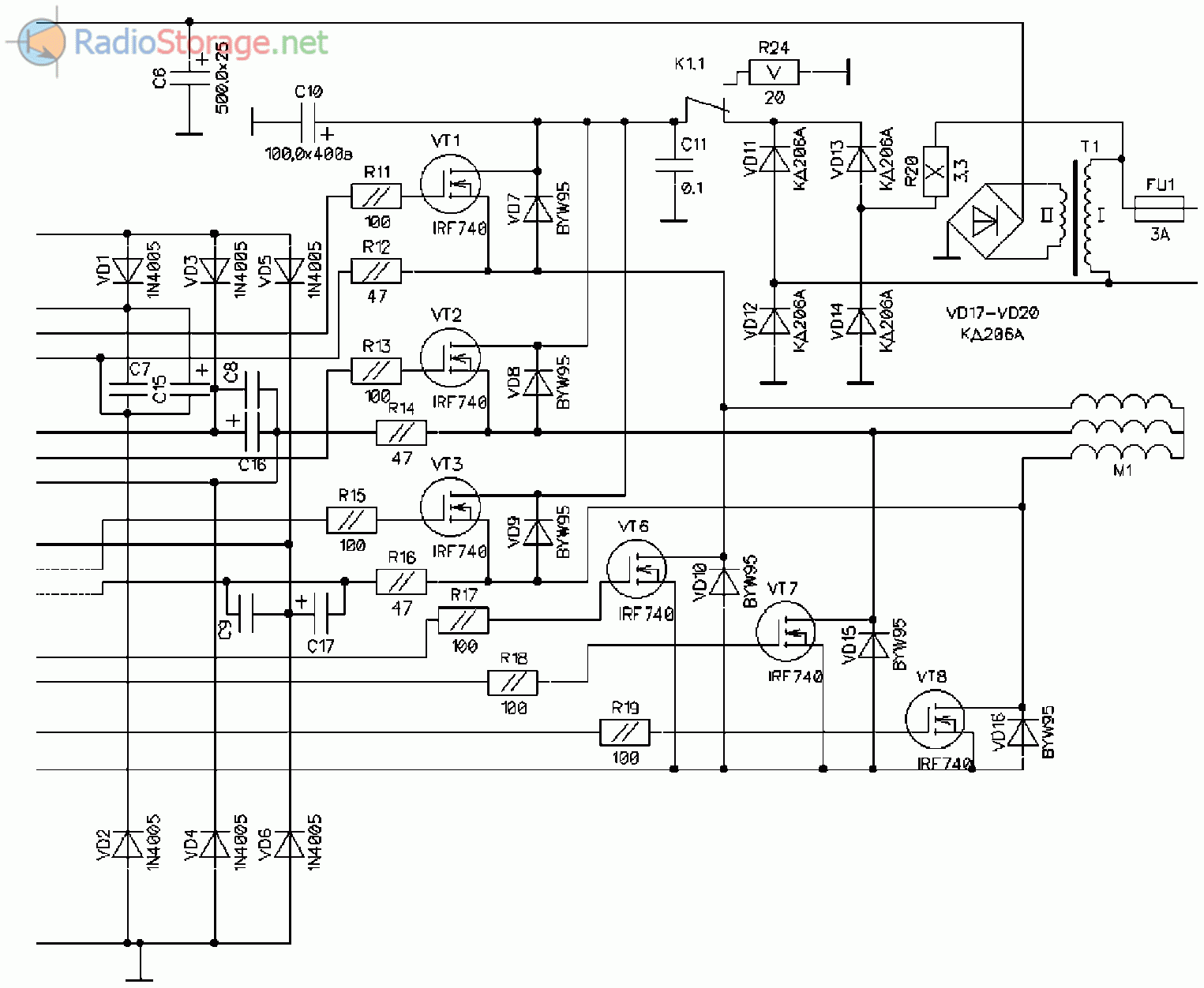
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.
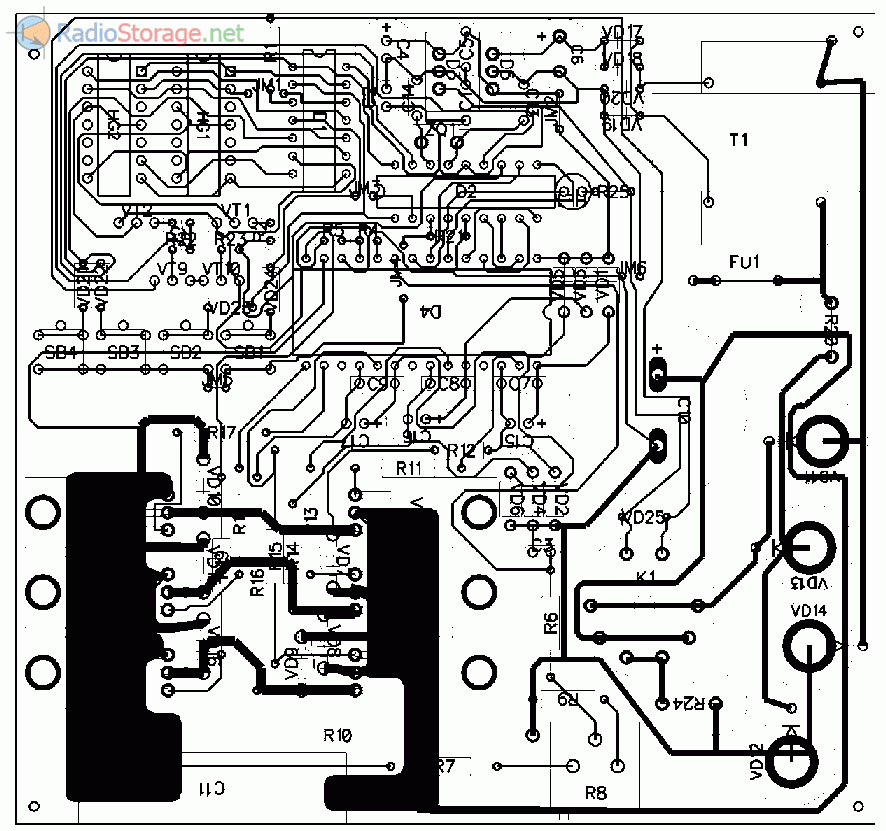
Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель
7. Асинхронные двигатели. Технические средства автоматизации и управления. Учебное пособие
7.1. Принцип действия асинхронного двигателя
7.2. Статические характеристики асинхронного двигателя
7.3. Управление асинхронными двигателями
7.3.1. Управление трехфазными асинхронными двигателями
7.3.2. Управление двухфазными асинхронными двигателями
7.1. Принцип действия асинхронного двигателя
Двигатели переменного тока делятся на синхронные и асинхронные двигатели. Асинхронные двигатели (АД) в свою очередь делятся на двух и трехфазные, из которых в качестве исполнительных двигателей в системах автоматического управления в основном применяются маломощные двигатели до 300 Вт.
Их преимущества перед ДПТ: малая инерционность, бесконтактность, дешевизна.
Их недостатки в сравнении с ДПТ: большие тепловые потери, малый пусковой момент, нелинейные характеристики.
Принцип действия рассмотрим на примере двухфазного асинхронного двигателя, с полым ротором в виде алюминиевого стакана. На статоре этого двигателя расположены две обмотки. Эти обмотки расположены на магнитопроводе под углом 900 друг к другу. На эти обмотки подаются синусоидальные напряжения, сдвинутые по фазе на 900 друг к другу. Под действием этих напряжений в обмотках протекают токи I1, I2, также синусоидальные и сдвинутые по фазе на 900. Будем считать, что амплитуды их равны. Эти токи, в свою очередь, создают в магнитопроводе два пульсирующих вектора магнитной индукции и, соответственно два магнитных потока, равных по амплитуде и сдвинутые по фазе на 90
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы (рис. 70).
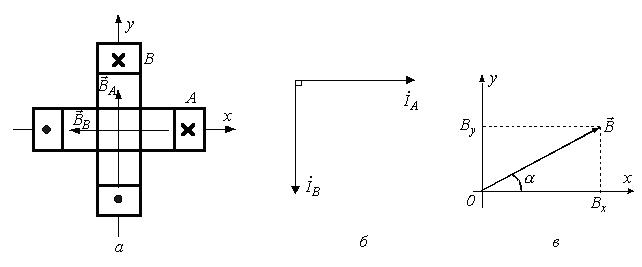
Рис. 70. Двухфазная система
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы ВА и ВВ, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 90 0, то ВА= Вmsin(wt) и ВВ= Вmsin(wt-900).
Найдем проекции результирующего вектора магнитной индукции Вна оси x и y декартовой системы координат, связанной с осями катушек:

Модуль результирующего вектора магнитной индукции в соответствии с рис. 70 равен ,
,
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать

Полученные соотношения показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой  , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю.
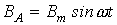
Симметричная трехфазная система катушек также позволяет получить круговое вращающееся магнитное поле. Рис. 71. Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Катушки питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
 ;
;  ;
;  .
.
Произведя аналогичные расчеты, получим, что модуль результирующего вектора магнитной индукции равен В=1,5 Вm, и также вращается в пространстве с постоянной угловой частотой ,
Рис. 71. Трехфазная система
Силовые линии вращающегося магнитного поля пересекают ротор двигателя, выполненный, например, в виде алюминиевого стакана. В материале ротора наводятся вихревые токи, которые взаимодействуют с вращающимся магнитным потоком статоре и создают движущий момент. Под действием этого момента ротор начинает раскручиваться и набирает скорость до тех пор, пока движущий момент не будет уравновешен моментом, создаваемым нагрузкой.
Скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля, так как в случае их равенства результирующий магнитный поток будет неподвижен относительно ротора, вихревых токов не будет, и, следовательно, не будет движущего момента. Поэтому двигатель называется асинхронным. Величина отставания скорости вращения ротора от скорости вращения поля характеризуется скольжением.
При заторможенном роторе S=1, в идеальном случае при вращении со скоростью поля S=0.
Используются различные конструкции ротора АД. Есть трехфазные АД с фазным ротором, при этом на роторе также намотаны три, пространственно сдвинутых обмотки. В эти обмотки обычно включают внешние сопротивления (реостаты), которыми ограничивается пусковой ток и может регулироваться скорость вращения ротора. Двухфазные АД изготавливают с короткозамкнутой обмоткой: в виде беличьего колеса; в виде вала или стакана из проводящего материала. .Рис 72, 73, 74.
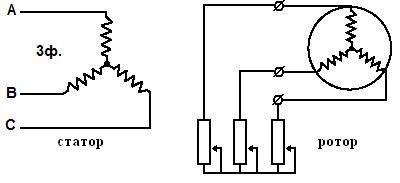
Рис. 72. Трехфазный АД с фазным ротором

Рис. 73. Ротор АД в виде беличьей клетки (а) и в виде стакана (б)
7.2. Статические характеристики асинхронного двигателя
Под действием электромагнитной индукции в обмотках или элементах короткозамкнутого ротора («беличьей клетке») индуктируются вторичные ЭДС и токи частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный момент M, что приводит к вращению ротора с частотой ω1. Рассмотрим для примера модель двигателя, в которой число пар полюсов p=1.
Частота индуцируемых во вторичной обмотке (роторе) ЭДС и токов ω2 зависит от скольжения S:
 .
.
Эквивалентная схема цепи ротора в рабочем режиме показана на Рис 74.
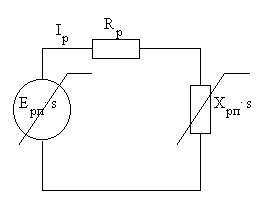
Рис. 74. Схема цепи ротора АД
Она содержит изменяемый источник ЭДС Eрп·S и изменяемое индуктивное сопротивление xр=xрп·S. Они изменяются при изменении скольжения S (частоты вращения), а активное сопротивление Rp не изменяется.
Мы можем привести рабочий режим двигателя к режиму неподвижного ротора и рассматривать асинхронную машину как обычный трансформатор с неподвижными обмотками; в результате преобразования получаем эквивалентную схему. АД, с учетом параметров обмотки статора.
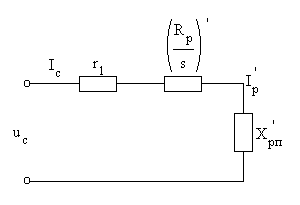
Рис. 75. Эквивалентная электрическая схема АД
На схеме обозначены: 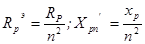 — приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
— приведенные сопротивления, n- коэффициент трансформации, а r1— активное сопротивление цепи статора. На основании этой схемы получим выражение для тока ротора
Выражение для вращающегося момента можем получить из энергетического уравнения M·ω1= M·ω+m1·Ip2·Rp, где m1— количество фаз. Левая часть уравнения — электромагнитная мощность, а правая — механическая плюс электрическая мощности.
Подставляя сюда выражения для тока ротора, получим аналитическое выражение для электромагнитного момента и, если пренебречь активным сопротивлением обмотки статора, получается уравнение Клосса, отражающее зависимость электромагнитного момента от скольжения. Выражение для момента двигателя представлено через параметры критической точки:
 .
.
Скольжение, соответствующее максимальному моменту, называется критическим и обозначается SK или SM.
Критическое скольжение за зависит от соотношение активного и индуктивного сопротивлений ротора. При r1=0 получим  и
и  .
.
Вид зависимости электромагнитного момента и тока ротора от скольжения показан на. рис. 76.
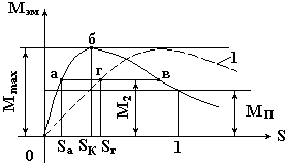
Рис. 76. Зависимость электромагнитного момента АД от скольжения
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2. На рис. 76 имеются две точки, для которых справедливо равенство Мэм = М2; это точки а и в.
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным. Еще выводы:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений;
- вращающий момент пропорционален квадрату напряжения сети.
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n2 = f (M2). Механическую характеристику получают при условии U — const, w1 — const. На рис. 77 изображена типичная механическая характеристика асинхронного двигателя.
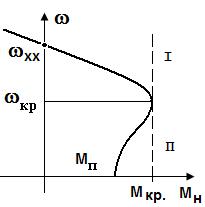
Рис. 77. Механическая характеристика асинхронного двигателя
На механической характеристике АД можно выделить два участка, которые разделены значением Мкр:
- режим устойчивой работы,
- режим неустойчивой работы.
Для каждого двигателя есть свое значение Мкр. При работе двигателя на первом участке Мкр.< Мн<0. и двигатель может развить вращающий момент, компенсирующий момент нагрузки. При работе двигателя на втором участке Мкр.> Мн происходит торможение и двигатель останавливается.
Различают 3 статических режима работы:
- Двигательный. В этом режиме направление вращения ротора и поля совпадают и . wp<w.
- Режим генераторного торможения. В этом режиме направление вращения ротора и поля совпадают, но . wp>w. Это возможно, если момент нагрузки поменяет знак. Двигатель не потребляет, а отдает энергию.
- Режим торможения противовключением. Реализуется, если в обмотке управления изменится фаза на 1800, после этого вращающий момент поменяет знак и будет тормозить ротор.
7.3. Управление асинхронными двигателями
Есть различные способы управления асинхронными двигателями:
- параметрическое управления трехфазными асинхронными двигателями.
- симметричное частотное управление,
- несимметричное амплитудно–фазовое управление,
7.3.1. Управление трехфазными асинхронными двигателями
1. Рассмотрим сначала способы управления трехфазными асинхронными двигателями. Первый способ используется для двигателей с фазным ротором. Критическое скольжение Skr определяется активным сопротивлением ротора Rr. Если Rr изменять, то будет изменяться наклон механической характеристики и соответственно скорость вращения ротора. Рис.78..
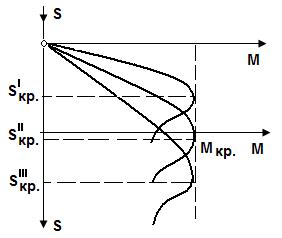
Рис. 78. Механическая характеристика асинхронного двигателя
Такой способ используется при пуске двигателя под нагрузкой, когда желательно, чтобы пусковой момент был максимальным. Для регулирования он применяется редко, т. к. велики тепловые потери в роторной цепи. Другим способом регулирования скорости является изменение напряжения на статоре, для АД вращающий момент изменяется пропорционально квадрату напряжения. При этом изменение напряжения питания мало влияет на частоту вращения ротора на рабочем участке и диапазон управления напряжением весьма ограничен.
2. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частотном управлении.. Изменяя частоту вращения поля ω1, можно изменять частоту вращения ротора ω при этом желательно, чтобы. жесткость характеристики не изменялась. Для этого одновременно с частотой, изменяют напряжение питания Uc так, чтобы их отношение оставалось постоянным Uc/w1=const.
Такое управление называется пропорциональным частотным управлением. Вид механических характеристик при пропорциональном управлении показан на рис. 79.
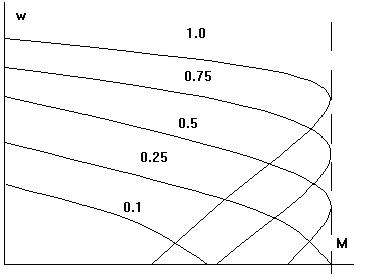
Рис. 79. Частотное управление асинхронным двигателем
При симметричном частотном управлении требуется специальное устройство преобразователь частоты, формирующий на выходе синусоидальный сигнал с изменяемой частотой w. Поле при этом управлении круговое, амплитуды на обмотках равны. Диапазон частот должен быть ограничен, так как при низких частотах падает индуктивное сопротивление обмоток и сильно растет ток, для высоких частот тоже существуют конструктивные и электрические ограничения. Поэтому при частотном управлении на самом деле идет управление по двум параметрам: частоте и амплитуде.
Функциональная схема частотного управления представлена на. на рис. 80. Она состоит из управляемого выпрямителя УВ, преобразующего напряжение переменного тока частотой 50 Гц в напряжение постоянного тока Uп, величина которого может регулироваться устройством управления УУ. Автономный инвертор АИ преобразует напряжение Uп в трехфазное напряжение изменяемой частоты f1. Управляющее устройство, изменяя частоту f1в в зависимости от задания ωз, изменяет также и напряжение Uп так, чтобы их отношение оставалось постоянным. Система управления может иметь обратную связь по скорости вращения через тахогенератор ТГ.
Более совершенным, чем пропорциональное управление, является частотно-токовое управление, при котором контролируется, кроме частоты вращения, ток якоря от датчика, что позволяет оставлять постоянным поток при изменении частоты f1 и нагрузки.
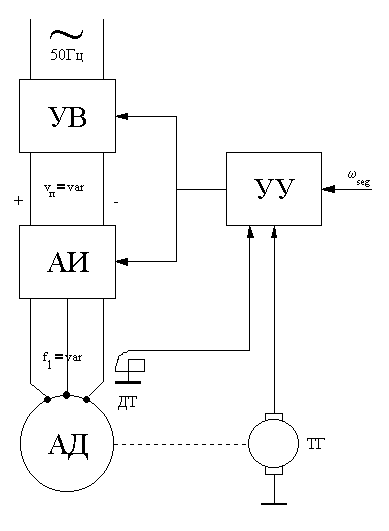
Рис. 80. Функциональная схема частотного управления асинхронным двигателем
7.3.2. Управление двухфазными асинхронными двигателями
В исполнительных приводах малой мощности широко в основном используются управляемые и неуправляемые двухфазные асинхронные двигатели. Эти , двигатели имеют две обмотки: одна включается в сеть непосредственно и называется обмоткой возбуждения (главной). На обмотку управления (вспомогательную), сдвинутую на статоре на90o градусов напряжение подается через фазосдвигающий элемент. Ротор всегда короткозамкнутый.
При таком способе управления есть разные варианты: амплитудное, фазовое и амплитудно–фазовое управление. При этих способах. на второй обмотке можно менять амплитуду напряжения, его фазу или оба параметра одновременно. При этом поле превращается из кругового в эллиптическое. При этом наряду с напряжениями и токами прямой последовательности фаз, создающими двигательный режим, возникает напряжение и токи обратной последовательности, вызывающие торможение. Таким образом, меняя степень асимметрии, можно регулировать скорость двигателя. Рис.81.

Рис. 81. Конденсаторный и управляемый двухфазные АД
При Uy=0, получим пульсирующее поле и w=0. Наиболее распространенным способом является конденсаторное управление. Чаще всего используется амплитудное несимметричное управление, когда UB=UC, а Uγ=α·Uc, где α меняется от 0 до 1. Можно получить выражения для вращающего момента при амплитудном управлении, аналогичное уравнению Клосса.
При симметрии напряжений, когда α=1, из этого уравнения получим нормальное уравнение выражение для асинхронной машины Так как в двухфазных двигателях SM>1, то при α=0, т.е. при отключении обмотки управления двигатель тормозится, и останавливается при S=1.
Механические и регулировочные характеристики асинхронного двигателя. нелинейны. Их заменяют в рабочей области прямыми:
M = b1U-b2w.
Коэффициенты b1 и b2 определяют по паспортным данным АД. В момент пуска М =Мп, w = 0, поэтому
Мп = b1∙Un и b1 = Мн/Un.
Для номинального режима аналогично получим, учитывая , что PN = MN∙wN,
MN = Мп -b2∙ wN и b2∙ = (Мп -MN)/wN.
Мы получим уравнение линеаризованной механической характеристики :
w = (b1/ b2)∙U—M/ b2.
Механические и регулировочные характеристики асинхронного двигателя показаны на рис. 82.
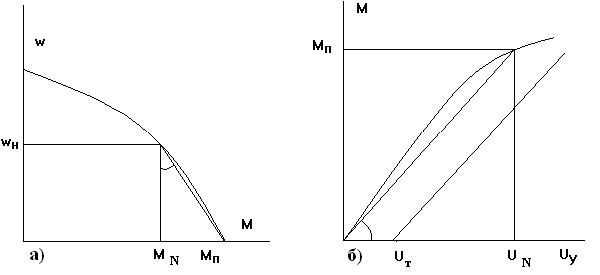
Рис. 82. Механическая и регулировочная характеристики двухфазного АД
После линеаризации асинхронный двигатель может быть представлен как линейная динамическая система, описываемая следующими уравнениями (bw = b1, bu = b2):


 .
.
Рассмотрим случай, когда сухое трение отсутствует и есть только скоростное трение, то есть МТ = F∙w. Заменив . и проведя преобразования получим:
и проведя преобразования получим:
 .
.
Отсюда выражение для передаточной функции
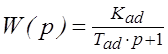 , где коэффициент передачи
, где коэффициент передачи  и электромеханическая постоянная времени
и электромеханическая постоянная времени 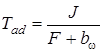
Этой передаточной функции соответствует структурная схема и переходный процесс, представленные на рис. 83.
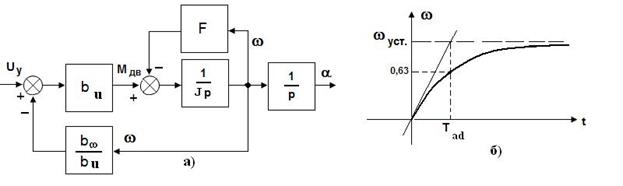
Рис. 83. Структурная схема и переходный процесс АД
Векторное управление для асинхронного электродвигателя «на пальцах»
В предыдущей статье «Векторное управление электродвигателем «на пальцах» рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе β – течет ток в роторе ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось d, намагнитив машину, подготовив всё для подачи тока в ось q статора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Схема управления трехфазным асинхронным двигателем
Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400. 1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM – англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления “Пуск” (SA1), “Стоп” (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.”0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600. 1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2. 4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.
Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 с (эта константа находится в ячейках 0207 и 0158 таблицы). Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
С.М. Абрамов, г. Оренбург, Россия. Электрик-2004-08.
- Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам//СЫр№ш -1999. – №1.
- Обухов Д, Стенин С., Струнин Д, Фрадкин А. – Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131//ChipNews. – 1999. -№6.
Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок “пуск” и “стоп”,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.
При нажатии на кнопку SB2 “Пуск” на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке “Пуск”. Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки “Пуск” катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют “толчковым”. Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 “Стоп”. При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку “Стоп” и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 “Пуск”. Таким образом, магнитный пускатель обеспечивает т.н. “нулевую защиту”. Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь – защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы – A , B , С, а при включении пускателя KM2 – порядок фаз меняется на С, B , A.
Схема показана на рис. 2.
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 “Стоп”, двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку “Стоп”.
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок “Пуск” SB2 – SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки “Пуск” включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 “Стоп”включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 – нормально-закрытый (размыкающий) контакт, в цепи КМ3 – кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 – нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку “Стоп”, что очень удобно. Кнопка “Стоп” нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Типовые схемы управления электроприводами с асинхронными двигателями
Типовые схемы релейно-контакторного управления асинхронными двигателями (АД) строятся по тем же принципам, что и схемы управления двигателями постоянного тока.
Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК).

Рис. 2.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Реверсивная схема управления ад.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК (рис. 2.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.

Рис. 2.2. Схема управления АД с использованием реверсивного магнитного пускателя
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FА). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SВ1 или SВ2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SВЗ, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SВ2.
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет свое направление вращения на противоположное, что приводит к началу процесса реверса. Этот процесс состоит из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SВЗ нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SВ1 и SВ2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и, наоборот.
Следует отметить, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании.
Схема управления многоскоростным АД.
Эта схема (рис. 2.3) обеспечивает получение двух скоростей двигателя путем соединения секций (полуобмоток) обмотки статора в треугольник или двойную звезду, а также его реверсирование. Защита электропривода осуществляется тепловыми реле КК1 и КК2 и предохранителями FА.
Рис. 2.3. Схема управления двухскоростным АД
Для пуска двигателя на низкую частоту вращения нажимается кнопка SВ4, после чего срабатывает контактор КМ2 и блокировочное реле КV. Статор двигателя оказывается включенным по схеме треугольника, а реле КV, замкнув свои контакты в цепях катушек аппаратов КМЗ и КМ4, подготавливает подключение двигателя к источнику питания. Далее нажатие кнопки SВ1 или SВ2 приводит к включению соответственно в направлении «Вперед» или «Назад».
После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Для этого нажимается кнопка SВ5, что приведет к отключению контактора КМ2 и включению контактора КМ1, обеспечивающему переключение секций обмоток статора с треугольника на двойную звезду.
Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Применение в схеме двухцепных кнопок управления не допускает одновременного включения контакторов КМ1 и КМ2, КМ3 и КМ4. Этой же цели служит перекрестное включение размыкающих блок-контактов контакторов КМ1 и КМ2, КМ3 и КМ4 в цепи их катушек.
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени
Пуск двигателя осуществляется нажатием кнопки SВ1 (рис. 2.4), после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.

Рис. 2.4. Схема управления пуском и динамическим торможением АД с короткозамкнутым ротором
Для остановки двигателя нажимается кнопка SВ2, Контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Типовые схемы управления АДс фазным ротором. Схемы управления двигателя с фазным ротором, которые рассчитаны в основном на среднюю и большую мощность, должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора. За счет включения резисторов в цепь ротора можно также увеличить момент при пуске вплоть до уровня критического (максимального) момента.
Схема одноступенчатого пуска АД в функции времени и торможения противовключением в функции ЭДС
После подачи напряжения включается реле времени КТ (рис. 2.5), которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.

Рис.2.5. Схема управления пуском и торможением противовключением АД с фазным ротором
Включение двигателя производится нажатием кнопки SВ1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YВ растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1, в цепи ротора, и двигатель выходит на свою естественную характеристику.
{SOURCE}
УПРАВЛЕНИЕ ТРЕХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ — Студопедия
1. Цель работы:
Знакомство с устройством, схемами включения, принципом действия и основными характеристиками асинхронного двигателя. Приобретение навыков по управлению работой асинхронного трехфазного двигателя.
2. Оборудование:
Трехфазный асинхронный электродвигатель, измеритель мощности, преобразователь частоты, магнитный пускатель, цифровой фототахометр.
- Предварительное домашнее задание
— Изучить тему «Трехфазный асинхронный двигатель», содержание данной лабораторной работы и быть готовым ответить на все контрольные вопросы к ней.
— Начертить принципиальные электрические схемы исследуемых установок с включенными измерительными приборами.
— Ознакомиться с паспортными данными исследуемого трехфазного асинхронного двигателя и занести в табл. 1.
Таблица 1.
| Тип двигателя | Ном. напряжение, В | Ном. ток, А | Ном. мощность, кВт | Ном. частота вращения, об/мин | Коэффициент полезного действия, % | Ном. коэффициент мощности |
- Порядок выполнения работы
1) Ознакомиться с лабораторной установкой
2) Пробный пуск двигателя.
Собрать электрическую схему для пробного пуска двигателя на холостом ходу (рис. 1). Обратить внимание при этом на схему соединения обмоток двигателя в соответствии с паспортными данными, учитывая, что выходное напряжение частотного преобразователя 220 В (при частоте 50 Гц).
Установить частоту питающего напряжения 50 Гц (ручка потенциометра RP2 «Установка частоты» — в крайнем правом положении). Тумблер SA4 установить в позицию «Стоп». Тумблер SA5 установить в позицию «Вперед».
После проверки схемы преподавателем произвести пробный пуск двигателя.
Включить электропитание стенда (автоматический выключатель на кожухе с тыльной стороны) и частотного преобразователя (выключатель SA3). Для пуска двигателя перевести тумблер SA4 в позицию «Пуск».
При пуске двигателя обратить внимание на направление вращения двигателя. Остановить двигатель (перевести тумблер SA4 в положение «Стоп»). Перевести тумблер SA5 в позицию «Назад». Запустить двигатель и обратить внимание на направление вращения двигателя. Остановить двигатель. Объяснить, из-за чего двигатель вращается в противоположную сторону.

Рис.1
3) Снять регулировочную характеристику асинхронного двигателя n=f(f) при его работе на холостом ходу.
Для этого запустить двигатель (тумблер SA5 в позиции «Вперед») и изменяя частоту напряжения питания двигателя с помощью потенциометра RP2 «Установка частоты» измерять величину напряжения и скорость вращения ротора двигателя с помощью фототахометра. Результаты занести в табл. 2. По результатам измерений определить значение частоты напряжения питания при каждом измерении. При этом учесть, что в частотном преобразователе обеспечивается выполнение условия U/f= const, а наибольшее значение частоты напряжения преобразователя — 50 Гц.
Таблица 2.
| U, В | |||||
| n, об/мин | |||||
| f, Гц |
4) Собрать схему для снятия механических и рабочих характеристик асинхронного двигателя при соединении обмоток двигателя в треугольник (рис. 2).
При снятии механических и рабочих характеристик в качестве нагрузочной машины используется генератор постоянного тока с независимым возбуждением. Величина нагрузки генератора задается переключателем SA12 генератора постоянного тока. Перед пуском двигателя переключатели SA12 и SA11 генератора постоянного тока установить в позицию «0». У цифрового вольтметра установить режим измерения постоянного напряжения. Для этого тумблер SA7 установить в позицию «=». Переключатель предела измерения тока измерителя мощности установить в позицию «2А». Представить схему для проверки преподавателю.

Рис.2
5) Включить асинхронный двигатель (тумблер SA4 в позицию «Пуск»),
Установить на четвертой строке цифрового измерителя режим измерения угла сдвига фаз «Fi».В соответствии с табл. 3 записать показания приборов в режиме холостого хода двигателя (при отсутствии электропитания на обмотке возбуждения генераторе постоянного тока). Подать на обмотку возбуждения генератора постоянного тока электропитание с помощью выключателя SA10. Изменяя величину нагрузки генератора переключателем SA12, произвести измерения линейного напряжения питания UЛ, линейного тока IЛ, потребляемого двигателем, угла сдвига фаз Fi,частоты вращения n, напряжения якоря генератора UЯГ, тока якоря генератора IЯГ. Частоту вращения измерять цифровым фототахометром. Результаты измерений записывать в табл. 3. Выключить двигатель и генератор.
6) Для каждого режима работы провести вычисления тормозного момента Мт, создаваемого генератором постоянного тока на валу асинхронного двигателя, полезной мощности Р2, коэффициента полезного действия исследуемого асинхронного двигателя η и скольжения s (табл. 3).
Модель динамики трехфазной асинхронной машины, также известен как индукционная машина
Номинальная полная мощность Pn (ВА), среднеквадратичное линейное напряжение
Vn (В) и частота fn (Гц). По умолчанию [3730 460 60] для
единицы о.е. и [1.845e + 04 400 50] для единиц СИ.
Сопротивление статора Rs (Ом или pu) и индуктивность рассеяния
Lls (H или pu).По умолчанию [0,01965 0,0397] для
единицы о.е. и [0,5968 0,0003495] для единиц СИ.
Сопротивление ротора Rr ‘(Ом или pu) и индуктивность рассеяния
Llr ‘(H или pu) оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлен на Wound или Squirrel-cage .
По умолчанию [0,01909 0.0397] для блоков PU и [0,6258
0,005473] для единиц СИ.
Сопротивление ротора Rr1 ‘(Ω или pu) и индуктивность рассеяния
Llr1 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4155
0.002066] для единиц СИ.
Сопротивление ротора Rr2 ‘(Ом или pu) и индуктивность рассеяния
Llr2 ‘(H или pu), оба относятся к статору. Этот параметр виден
только когда параметр Тип ротора на вкладке Конфигурация установлен на Двойная беличья клетка . По умолчанию
составляет [0,01909 0,0397] для единиц о.е. и [0,4168
0,0003495] для единиц СИ.
Намагничивающая индуктивность Lm (H или pu).По умолчанию 1,354 для
единицы о.е. и 0,0354 для единиц СИ.
Для диалогового окна единиц СИ :
комбинированный коэффициент инерции машины и нагрузки J (кг.м 2 ),
комбинированный коэффициент вязкого трения F (Н.м.с) и пары полюсов p.
Момент трения Tf пропорционален скорости вращения ротора ω
(Tf = F.w). По умолчанию [0,05 0,005879 2] .
Для диалогового окна единиц о.у. :
постоянная инерции H (s), комбинированный коэффициент вязкого трения
F (pu), а пары полюсов p.По умолчанию [0,09526 0,05479 2] .
Задает начальное скольжение s, электрический угол Θe (градусы), величина тока статора (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs ]
Если для параметра Тип ротора установлено значение Обмотка ,
вы также можете указать необязательные начальные значения для тока ротора
величина (A или pu) и фазовые углы (градусы):
[скольжение, th, i как , i bs , i cs , фаза как , фаза bs , фаза cs , i ar , i br , i cr , фаза ar , фаза br , фаза cr ]
Когда параметр Тип ротора установлен на Беличья клетка ,
начальные условия могут быть вычислены с помощью инструмента Load Flow или
Инструмент инициализации станка в блоке Powergui.
По умолчанию [1,0 0,0,0 0,0,0] для о.у.
единиц и [0 0 0 0 0 0 0 0] для единиц СИ.
Определяет наличие магнитного насыщения ротора и статора. железо имитируется или нет. По умолчанию очищен.
Определяет параметры кривой насыщения без нагрузки. Магнитный
насыщение железа статора и ротора (насыщение взаимного
поток) моделируется кусочно-линейной зависимостью, определяющей точки
кривой насыщения без нагрузки.Первая строка этой матрицы содержит
значения токов статора. Вторая строка содержит значения соответствующих
клеммы напряжения (напряжения статора). Первая точка (первый столбец
матрицы) должно отличаться от [0,0]. Эта точка соответствует
до точки, где начинается эффект насыщения. По умолчанию [0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763
; 0,5,0,7,0,9,1,1,1,1,2, 1,3,1,4,1,5] для единиц pu и [14.03593122,
27.81365428, 53.79336849, 72.68890987, 97.98006896, 148.6815601, 215.7428561,
302.9841135, 428.7778367; 230, 322, 414, 460, 506, 552, 598, 644,
690] для единиц СИ ..
Вы должны выбрать Simulate saturation check коробка для имитации насыщенности. Если вы не выберете Simulate флажок насыщения , связь между статором ток и напряжение статора линейны.
Щелкните Plot , чтобы просмотреть указанную без нагрузки кривая насыщения.
10 различных режимов работы (цикл нагрузки) трехфазных асинхронных двигателей
Рабочий цикл двигателя / цикл нагрузки
Термин «режим работы» определяет цикл нагрузки, которому подвергается машина, включая, если применимо, запуск, электрическое торможение, нет — периоды нагрузки и отдыха без напряжения, включая их продолжительность и последовательность во времени.
 10 различных типов режима (цикл нагрузки) трехфазных асинхронных двигателей (фото предоставлено ABB)
10 различных типов режима (цикл нагрузки) трехфазных асинхронных двигателей (фото предоставлено ABB)Режим, рассматриваемый как общий термин, например, может быть классифицирован как непрерывный режим, кратковременный режим или периодический режим.Процентное соотношение между периодом нагрузки и общей продолжительностью рабочего цикла определяется коэффициентом длительности цикла.
Ответственность за декларирование обязанности лежит на покупателе.
Если покупатель не декларирует пошлину, изготовитель должен исходить из того, что применяется режим режима S1 (режим непрерывной работы). Тип пошлины должен быть обозначен соответствующей аббревиатурой, и покупатель может описать тип пошлины на основе классификации в соответствии с указаниями, приведенными ниже.
Когда номинальные параметры присваиваются двигателю (значения, заявленные, как правило, изготовителем, для определенного рабочего состояния машины), производитель должен выбрать один из классов номинальных значений . Если обозначение не дано, применяется рейтинг, относящийся к продолжительному режиму работы.
В соответствии с классификацией Std. В IEC 60034-1 приведены некоторые указания относительно режимов работы, которые обычно рассматриваются как справочные для указания номинальных характеристик двигателя.
Непрерывный режим работы (тип S1)
Для двигателя, подходящего для этого режима работы, указывается номинальная мощность, при которой машина может работать в течение неограниченного периода времени. Этот класс рейтинга соответствует режиму работы, соответствующая аббревиатура которого — S1 .
ОПРЕДЕЛЕНИЕ — Режим работы S1 можно определить как работу при постоянной нагрузке , поддерживаемой в течение достаточного времени, чтобы позволить машине достичь теплового равновесия .
 Рисунок 1 — Продолжительный режим работы: Тип режима S1
Рисунок 1 — Продолжительный режим работы: Тип режима S1Где: ΔT — Время, достаточное для достижения машиной теплового равновесия
Вернуться к содержанию ↑
Кратковременный режим (тип S2)
Для Для двигателя, подходящего для этого режима работы, указывается номинальная мощность, при которой машина, запускаемая при температуре окружающей среды, может работать в течение ограниченного периода.Этот класс рейтинга соответствует режиму работы, соответствующее сокращенное обозначение которого — S2 .
ОПРЕДЕЛЕНИЕ — Тип режима S2 может быть определен как работа при постоянной нагрузке в течение заданного времени , меньшего, чем требуется для достижения теплового равновесия, с последующим отключением питания и в состоянии покоя, достаточном для восстановления равновесие между температурой машины и температурой охлаждающей жидкости.
Полное обозначение представляет собой сокращенное обозначение типа режима, за которым следует указание продолжительности режима (S2 40 минут).
 Рисунок 2 — Кратковременный режим: Тип режима S2
Рисунок 2 — Кратковременный режим: Тип режима S2 - ΔTc — Время работы при постоянной нагрузке
- ΔT0 — Время без напряжения
Вернуться к содержанию ↑
Периодический режим (тип S3-S8)
Для двигателя, подходящего для этого режима работы, указывается номинальная мощность, при которой машина может работать в последовательности рабочих циклов. При таком режиме работы цикл загрузки не позволяет машине достичь теплового равновесия.
Этот набор номиналов связан с определенным типом режима работы от S3 до S8 , а полное обозначение позволяет идентифицировать периодический режим работы.
Если не указано иное, продолжительность рабочего цикла должна составлять 10 минут, а коэффициент продолжительности цикла должен иметь одно из следующих значений: 15%, 25%, 40%, 60% .
Коэффициент продолжительности цикла определяется как отношение между периодом нагрузки, включая запуск и электрическое торможение, и продолжительностью рабочего цикла, выраженное в процентах .
Тип режима S3
(Прерывистый периодический режим)
ОПРЕДЕЛЕНИЕ — Тип режима S3 определяется как последовательность идентичных рабочих циклов, каждый из которых включает время работы при постоянной нагрузке и время отключения а в покое . Вклад в повышение температуры, вносимый начальной фазой, незначителен.
Полное обозначение представляет собой аббревиатуру режима работы с последующим указанием коэффициента продолжительности цикла ( S3 30% ).
 Рисунок 3 — Прерывистый периодический режим: Тип режима S3
Рисунок 3 — Прерывистый периодический режим: Тип режима S3 - ΔTc — Время работы при постоянной нагрузке
- ΔT0 — Время без напряжения и в состоянии покоя
- Коэффициент продолжительности цикла = ΔTc / T
Вернуться к содержанию ↑
Тип режима работы S4
(Прерывистый периодический режим с запуском)
ОПРЕДЕЛЕНИЕ — Тип режима S4 определяется как последовательность идентичных рабочих циклов, каждый цикл включает значительное время запуска, время работы при постоянной нагрузке и время в отключенном состоянии и в состоянии покоя.
Полное обозначение представляет собой аббревиатуру режима работы, за которой следует указание коэффициента продолжительности цикла, момента инерции двигателя J M и момента инерции нагрузки J L , оба относятся к валу двигателя (S4 20% J M = 0,15 кг м 2 J L = 0,7 кг м 2 ).
 Рисунок 4 — Периодически кратковременный режим с запуском: Тип режима S4
Рисунок 4 — Периодически кратковременный режим с запуском: Тип режима S4 - ΔT * — Время пуска / разгона
- ΔTc — Время работы при постоянной нагрузке
- ΔT0 — Время отключения и покоя
- Коэффициент продолжительности цикла = (ΔT * + ΔTc) / T
Вернуться к содержанию ↑
Тип режима S5
(Периодически кратковременный режим с электрическим торможением)
ОПРЕДЕЛЕНИЕ — Тип режима S5 определяется как последовательность идентичных рабочих циклов, каждый цикл состоит из времени пуска, времени работы при постоянной нагрузке, времени электрического торможения и времени обесточивания и покоя.
Полное обозначение относится к режиму работы и дает такое же обозначение, как и в предыдущем случае.
 Рисунок 5 — Периодически кратковременный режим с электрическим торможением: Тип режима S5
Рисунок 5 — Периодически кратковременный режим с электрическим торможением: Тип режима S5 - ΔT * — Время пуска / разгона
- ΔTc — Время работы при постоянной нагрузке
- ΔTf — Время электрического торможения
- ΔT0 — Время в обесточенном состоянии и в состоянии покоя
- Коэффициент продолжительности цикла = (ΔT * + ΔTc + ΔTf) / T
Вернуться к содержанию ↑
Режим работы S6
(Непрерывный- периодический режим работы)
ОПРЕДЕЛЕНИЕ — Тип режима S6 определяется как последовательность идентичных рабочих циклов, каждый цикл состоит из времени работы при постоянной нагрузке и времени работы без нагрузки. Нет времени в обесточенном состоянии и в состоянии покоя.
Полное обозначение представляет собой аббревиатуру режима работы с последующим указанием коэффициента продолжительности цикла ( S6 30% ).
 Рисунок 6 — Периодический режим непрерывной работы: Тип режима S6
Рисунок 6 — Периодический режим непрерывной работы: Тип режима S6 - ΔTc — Время работы при постоянной нагрузке
- ΔT0 — Время работы без нагрузки
- Коэффициент продолжительности цикла = ΔTc / ΔT0
Вернуться к содержанию ↑
Тип режима S7
(Непрерывный периодический режим с электрическим торможением)
ОПРЕДЕЛЕНИЕ — Тип режима S7 определяется как последовательность идентичных рабочих циклов, каждый цикл состоит из время пуска, время работы при постоянной нагрузке и время электрического торможения. Нет времени в обесточенном состоянии и в состоянии покоя.
Полное обозначение представляет собой аббревиатуру режима работы с указанием момента инерции двигателя J M и момента инерции нагрузки J L ( S7 J M = 0,4 кг м 2 J L = 7,5 кг м 2 ).
 Рисунок 7 — Периодический режим непрерывной работы с электрическим торможением: Тип режима S7
Рисунок 7 — Периодический режим непрерывной работы с электрическим торможением: Тип режима S7 - ΔT * — Время пуска / разгона
- ΔTc — Время работы при постоянной нагрузке
- ΔTf — Время электрического торможения
- Коэффициент продолжительности цикла = 1
Вернуться к содержанию ↑
Тип режима S8
(Непрерывный периодический режим с соответствующей нагрузкой / скоростью)
ОПРЕДЕЛЕНИЕ — Определен тип режима S8 как последовательность идентичных рабочих циклов, каждый из которых состоит из времени работы при постоянной нагрузке, соответствующего заданной скорости вращения, за которым следует один или несколько периодов работы при других постоянных нагрузках, соответствующих различным скоростям вращения.
Нет времени в обесточенном состоянии и в состоянии покоя.
Полное обозначение представляет собой аббревиатуру режима работы с указанием момента инерции двигателя J M и момента инерции нагрузки J L , а также нагрузки, скорости и коэффициент продолжительности цикла для каждого режима скорости ( S8 J M = 0,7 кг · м 2 J L = 8 кг · м 2 25 кВт 800 об / мин 25% 40 кВт 1250 об / мин 20% 25 кВт 1000 об / мин 55% ).
 Рисунок 8 — Периодический режим непрерывной работы с соответствующей нагрузкой / скоростью: Тип режима S8
Рисунок 8 — Периодический режим непрерывной работы с соответствующей нагрузкой / скоростью: Тип режима S8 - ΔT * — Время пуска / разгона
- ΔTc1; ΔTc2; ΔTc3 — Время работы при постоянной нагрузке
- ΔTf1; ΔTf2 — Время электрического торможения
- Коэффициент продолжительности цикла = (ΔT * + ΔTc1) / T; (ΔTf1 + ΔTc2) / T; (ΔTf2 + ΔTc3) / T
Вернуться к содержанию ↑
Непериодический режим (тип S9)
Режим с непериодическими изменениями нагрузки и скорости
Для двигателя, подходящего для этого типа режима работы, рейтинг , при котором машина может работать непериодически, указан .Этот класс рейтинга соответствует типу обязанности, соответствующая аббревиатура — S9.
ОПРЕДЕЛЕНИЕ — Тип режима S9 определяется как режим, при котором обычно нагрузка и скорость изменяются непериодически в пределах допустимого рабочего диапазона. Эта нагрузка включает часто возникающих перегрузок, которые могут значительно превышать эталонную нагрузку .
 Рисунок 9 — Режим работы с непериодическими изменениями нагрузки и скорости: Тип режима S9
Рисунок 9 — Режим работы с непериодическими изменениями нагрузки и скорости: Тип режима S9 - ΔT * — Время пуска / разгона
- ΔTs — Время работы при перегрузке
- ΔTc — Время работы при постоянной нагрузке
- ΔTf — Время электрическое торможение
- ΔT0 — Время в обесточенном состоянии и в состоянии покоя
Вернуться к содержанию ↑
Режим работы с дискретными постоянными нагрузками и скоростями (тип S10)
Для двигателя, подходящего для этого типа режима, номинальная мощность, при которой машина может работать с определенным количеством дискретных нагрузок в течение достаточного времени, чтобы позволить машине достичь теплового равновесия.
Максимально допустимая нагрузка в течение одного цикла должна учитывать все части машины (систему изоляции, подшипники или другие части в отношении теплового расширения).
Этот класс рейтинга соответствует режиму работы, соответствующее сокращенное обозначение которого — S10 .
ОПРЕДЕЛЕНИЕ — Тип режима S10 определяется как работа, характеризующаяся определенным количеством дискретных значений нагрузки, поддерживаемой в течение достаточного времени, чтобы позволить машине достичь теплового равновесия. Минимальная нагрузка во время рабочего цикла может иметь нулевое значение и относиться к состоянию холостого хода или покоя.
Полное обозначение представляет собой аббревиатуру режима работы, за которой следует обозначение удельного количества p / Δt для частичной нагрузки и его продолжительности , а также указание на единицу количества T L , которое представляет ожидаемый тепловой срок службы системы изоляции, связанный с ожидаемым тепловым сроком службы в случае режима работы S1 с номинальной мощностью, и величиной r , которая указывает нагрузку в течение некоторого времени в обесточенном состоянии и в состоянии покоя ( S10 p / Δt = 1.1 / 0,4; 1 / 0,3; 0,9 / 0,2; r / 0,1 T L = 0,6 ).
 Рисунок 10 — Режим работы с дискретными постоянными нагрузками и скоростями: Тип режима S10
Рисунок 10 — Режим работы с дискретными постоянными нагрузками и скоростями: Тип режима S10Где:
- ΔΘ1; ΔΘ2; ΔΘ2 — разница между повышением температуры обмотки при каждой из различных нагрузок в пределах одного цикла и повышением температуры в зависимости от рабочего цикла S1 с эталонной нагрузкой
- ΔΘref — температура при эталонной нагрузке в зависимости от режима S1 t1; t2; t3; t4: время постоянной нагрузки в цикле P1; P2; P3; P4: время одного цикла нагрузки
(Pref: справочная нагрузка в зависимости от режима работы S1)
Вернуться к содержанию ↑
Режим эквивалентной нагрузки
Для двигателя, подходящего для этого режима работы, номинальные значения, для целей испытаний, при которых машина может работать при постоянной нагрузке до тех пор, пока не будет достигнуто тепловое равновесие, и что приводит к тому же повышению температуры обмотки статора, что и повышение средней температуры в течение одного цикла нагрузки указанного режима работы.
Этот класс номинальных значений, если применяется, соответствует режиму работы, обозначенному как «равный».
Вернуться к содержанию ↑
Ссылка // Трехфазные асинхронные двигатели Общие положения и предложения ABB по согласованию защитных устройств
.Трехфазный асинхронный двигатель мощностьюпеременного тока мощностью 4 кВт | асинхронный двигатель | асинхронный двигатель переменного тока асинхронный двигатель
ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ СЕРИИ Y
Введение: Трехфазный асинхронный двигатель серии Y представляет собой полностью закрытый двигатель с кожухом для охлаждения с вентилятором, в соответствии со стандартом ICE. Он обладает выдающимися характеристиками, такими как высокая эффективность, энергосбережение, высокий пусковой крутящий момент, низкий уровень шума, небольшая вибрация и простота обслуживания.
Применения : общего назначения, включая отрезные станки, вентиляторы, станки, миксер, сельскохозяйственную технику, насосы и т. Д.
Условия эксплуатации
Температура окружающей среды: -15 ° C Номинальное напряжение: 380 В или любое напряжение в диапазоне от 220 В до 660 В.
Номинальная частота: 50 Гц, 60 Гц Класс защиты: IP44, IP54, IP55
Класс изоляции: B F Метод охлаждения: IC0141 Режим работы: S1 (непрерывный)
Подключение: соединение звездой до 3 кВт , дельта-соединение для 4кВт и выше.
Технические характеристики
| Трехфазный асинхронный двигатель серии Y | |||||
| Модель | Мощность | Полная нагрузка | |||
| кВт | HP | Cuttent ( A) | скорость (об / мин) | ||
| 380 В 50 Гц Асинхронная скорость 3000 об / мин (2 полюса) | |||||
| У-801-2 | 0.75 | 1 | 1,81 | 2830 | |
| Y-802-2 | 1,1 | 1,5 | 2,52 | 2830 | |
| Y-90S-2 | 1,5 | 2 | 3,44 | 2840 | |
| Y-90L-2 | 2.2 | 3 | 4,83 | 2840 | |
| Y-100L-2 | 3 | 4 | 6,39 | 2870 | |
| Y-112M-2 | 4 | 5,5 | 8,17 | 2890 | |
| Y-132S1-2 | 5.5 | 7,5 | 11,1 | 2900 | |
| Y-132S2-2 | 7,5 | 10 | 15 | 2900 | |
| Y-160M1-2 | 11 | 15 | 21,8 | 2930 | |
| Y-160M2-2 | 15 | 20 | 29.4 | 2930 | |
| Y-160L-2 | 18,5 | 25 | 35,5 | 2930 | |
| Y-180M-2 | 22 | 30 | 42,2 | 2940 | |
| 380 В 50 Гц Асинхронная скорость 1500 об / мин (4 полюса) | ||||
| Y-801-4 | 0.55 | 0,75 | 1,51 | 1390 |
| Y-802-4 | 0,75 | 1 | 2,01 | 1390 |
| Y-90S-4 | 1,1 | 1,5 | 2,75 | 1400 |
| Y-90L-4 | 1,5 | 2 | 3.65 | 1400 |
| Y-100L1-4 | 2,2 | 3 | 5,03 | 1430 |
| Y-100L2-4 | 3 | 4 | 6,82 | 1430 |
| Y-112M-4 | 4 | 5,5 | 8,77 | 1440 |
| Y-132S-4 | 5.5 | 7,5 | 11,6 | 1440 |
| Y-132M-4 | 7,5 | 10 | 15,4 | 1440 |
| Y-160M-4 | 11 | 15 | 22,6 | 1460 |
| Y-160L-4 | 15 | 20 | 30.3 | 1460 |
| Y-180M-4 | 18,5 | 25 | 35,9 | 1470 |
| Y-180L-4 | 22 | 30 | 42,5 | 1470 |
| 380 В 50 Гц, асинхронная скорость 1000 об / мин (6 полюсов) | ||||
| Y-801-6 | 0.37 | 0,5 | 1,2 | 900 |
| Y-802-6 | 0,55 | 0,75 | 1,45 | 900 |
| Y-90S-6 | 0,75 | 1 | 2,25 | 910 |
| Y-90L-6 | 1,1 | 1,5 | 3.16 | 910 |
| Y-100L-6 | 1,5 | 2 | 3,97 | 940 |
| Y-112M-6 | 2,2 | 3 | 5,61 | 940 |
| Y-132S-6 | 3 | 4 | 7.23 | 960 |
| Y-132M1-6 | 4 | 5.5 | 9,4 | 960 |
| Y-132M2-6 | 5,5 | 7,5 | 12,6 | 960 |
| Y-160M-6 | 7,5 | 10 | 17 | 970 |
| Y-160L-6 | 11 | 15 | 24,6 | 970 |
| Y-180M-6 | 15 | 20 | 31.4 | 970 |
| асинхронный двигатель | асинхронный двигатель переменного тока асинхронный двигатель
ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ СЕРИИY2
Введение: Трехфазный асинхронный двигатель серии Y2 специально разработан для европейского рынка, клеммная коробка которого расположена в верхней части двигателя. Двигатель имеет очень компактную конструкцию и привлекательный внешний вид, размеры и установочные размеры соответствуют стандарту IEC.У мотора есть некоторые хорошие особенности, такие как высокий КПД, энергосбережение. Высокий пусковой крутящий момент, простота обслуживания и т. Д. Области применения : общего назначения, включая отрезные станки, вентиляторы, станки, миксер, сельскохозяйственную технику, насосы и т. Д. Условия эксплуатации Температура окружающей среды: -15 ° C Номинальное напряжение: 380 В или любое напряжение от 220 В до 660 В. Номинальная частота: 50 Гц, 60 Гц Класс защиты: IP44, IP54, IP55 Класс изоляции: B F Метод охлаждения: IC0141 Режим работы: S1 (непрерывный) Подключение: соединение звездой до 3 кВт , дельта-соединение для 4кВт и выше. Технические характеристики Примечание: для этого товара нужно товаров большого размера, поэтому его нужно отправить по морю.
Существует три типа конструкции двигателя:
B3 Рама с опорой, концевой щиток без фланца:
B35 Рама с опорой, концевой щиток с фланцем:
B5 Рама без опоры, концевой щиток с фланец.
Рама 63 — рама 132 могут быть выполнены в алюминиевом корпусе. Трехфазный асинхронный двигатель серии Y2 Модель Мощность Ток / А л.с. кВт Y2-631-2 0.25 0,18 0,51 Y2-632-2 0,33 0,25 0,67 Y2-711-2 0,5 0,37 0,98 Y2-712 -2 0,75 0,55 1,33 Y2-801-2 1 0.75 1,78 Y2-802-2 1,5 1,1 2,49 Y2-90S-2 2 1,5 3,34 Y2-90L-2 3 2,2 4,69 Y2-100L-2 4 3 6.14 Y2-112M-2 5,5 4 7,83 Y2-132S1-2 7,5 5,5 10,7 Y2-132S2-2 10 7,5 14,2 Y2-160M1-2 15 11 20.9 Y2-160M2-2 20 15 27,9 Y2-160L-2 25 18,5 33,9 Y2-180M-2 30 22 40,5 Модель Мощность Ток / А л.с. кВт Y2-632-4 0.25 0,18 0,61 Y2-711-4 0,33 0,25 0,76 Y2-712-4 0,5 0,37 1,07 Y2-801 -4 0,75 0,55 1,54 Y2-802-4 1 0.75 1,99 Y2-90S-4 1,5 1,1 2,8 Y2-90L-4 2 1,5 3,65 Y2-100L1-4 3 2,2 5,05 Y2-100L2-4 4 3 6.64 Y2-112M-4 5,5 4 8,62 Y2-132S-4 7,5 5,5 11,5 Y2-132M-4 10 7,5 15,3 Y2-160M-4 15 11 22.2 Y2-160L-4 20 15 29,8 Y2-180M-4 25 18,5 36,1 Y2-180L-4 30 22 42,6 Модель Мощность Ток / А л.с. кВт Y2-712-6 0.33 0,25 0,92 Y2-801-6 0,5 0,37 1,27 Y2-802-6 0,75 0,55 1,74 Y2-90S -6 1 0,75 2,23 Y2-90L-6 1.5 1,1 3,1 Y2-100L-6 2 1,5 3,89 Y2-112M-6 3 2,2 5,46 Y2-132S -6 4 3 7,1 Y2-132M1-6 5.5 4 9,3 Y2-132M2-6 7,5 5,5 12,3 Y2-160M-6 10 7,5 16,7 Y2-160L -6 15 11 23,6 Y2-180L-6 20 15 30.7
