Подключение и настройка частотного преобразователя
Частотный преобразователь используется для изменения частоты напряжения, питающего трехфазный двигатель. Кроме того, частотник позволяет подключить трехфазный электрический двигатель к однофазной сети без потерь мощности. В случае, когда для этих целей применяются конденсаторы, последнее невыполнимо.
Подключение частотника предполагает размещение перед ним автоматического выключателя, работающего с током, равным номинальному (или ближайшему большему в ряду номинальных токов автоматов) потребляемому току двигателя. Если ПЧ адаптирован на работу от трехфазной сети, необходимо задействовать трехфазный автомат, имеющий общий рычаг. Такой подход позволяет в случае короткого замыкания одной из фаз оперативно обесточить и все остальные фазы. Характеристики тока срабатывания должны полностью соответствовать току одной фазы электрического двигателя. Если же частотник предназначен для однофазного питания, имеет смысл применить одинарный автомат, рассчитанный на утроенный ток одной фазы. В любом случае, установка частотника не должна осуществляется путем включения автоматов в разрыв нулевого или заземляющего провода. Здесь подключение выполняется только напрямую.
Далее настройка преобразователя частоты предусматривает присоединение его фазных проводов к соответствующим контактам электрического двигателя. Перед этим необходимо соединить в электродвигателе обмотки по схеме «треугольник» или «звезда». Конкретный тип соединения определяется характером напряжения, вырабатываемого непосредственно преобразователем частоты.
Как правило, на корпусе двигателя приведены два значения напряжения. В ситуации, когда вырабатываемому частотником напряжению соответствует меньшее из указанных, необходимо применить схему «треугольник». В противном случае обмотки соединяются по принципу «звезды».
Пульт управления, входящий в комплект поставки частотного преобразователя, располагают в удобном месте. Подключить его необходимо согласно схеме, приведенной в инструкции к ПЧ. Далее рукоятка устанавливается в нулевое положение и выполняется включение автомата. При этом на пульте загорается световой индикатор. Для работы преобразователя необходимо нажать кнопку «RUN» (запрограммировано по умолчанию). Затем необходимо немного повернуть рукоятку, чтобы электродвигатель начал постепенное вращение. В случае, если двигатель вращается в противоположную сторону, нажимается кнопка реверса. Далее следует настроить рукояткой необходимую частоту вращения. Важно учесть, что на пультах многих частотников отображается не частота вращения электрического двигателя (об/мин), а частота питающего электродвигатель напряжения, выраженная в герцах.
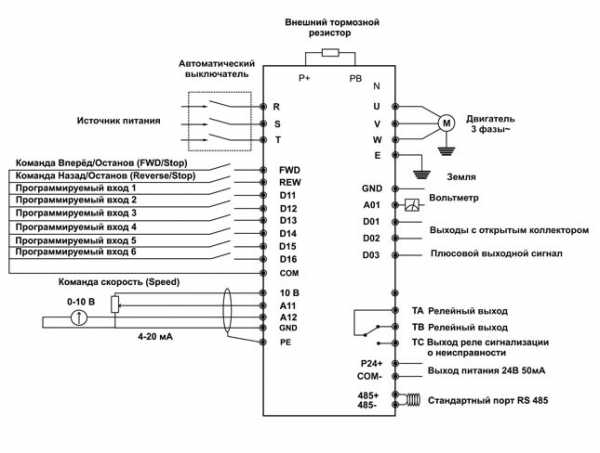
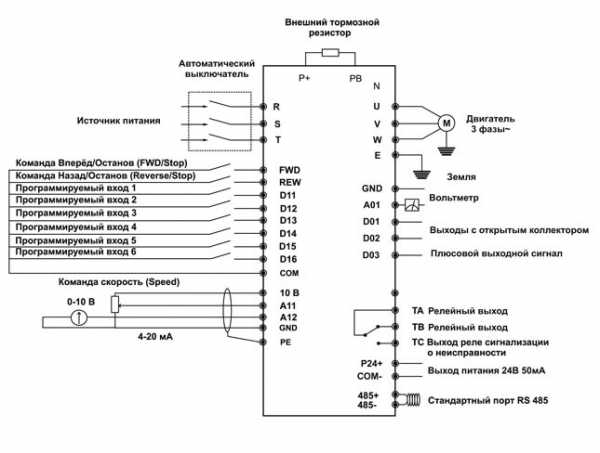
Схема подключения частотного преобразователя
Если у Вас остались вопросы по подключению и настройке преобразователей, обращайтесь за помощью к нашим техническим специалистам. Также предлагаем ознакомиться с каталогом частотных преобразователей Siemens и Prostar.
Другие полезные материалы:
Как правильно подобрать электродвигатель
Редуктор от «А» до «Я»
Как выбрать мотор-редуктор
Общие сведения об устройствах плавного пуска
Схемы подключения УПП
tehprivod.su
Принцип работы частотного преобразователя для асинхронного двигателя
Содержание:
- Что такое частотный преобразователь
- Принцип действия
- Настройка частотного преобразователя для электродвигателя
- Подбор частотного преобразователя для двигателя
- Видео
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
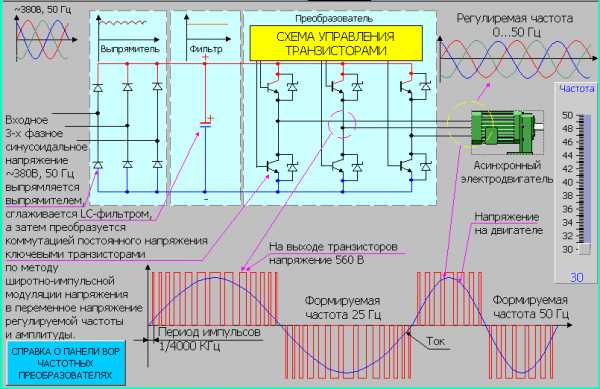
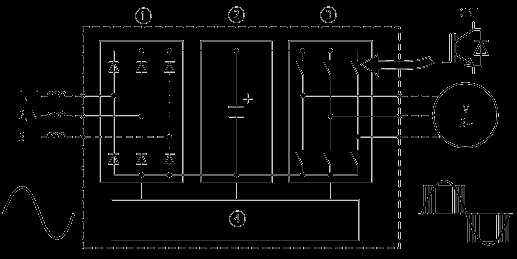
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.
Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
electric-220.ru
Настройка частотных преобразователей в Санкт-Петербурге

Состав работ по настройке частотного преобразователя зависит от необходимости применения функций и наличия внешних устройств управления, датчиков, дополнительных частотных преобразователей — при использовании преобразователя в составе насосных станций, подъемных кранов, лифтов и в ряде других применений. Если в схеме управления предусмотрено использование нескольких преобразователей, то один из них, как правило, является ведущим устройством, работающим большую часть времени в активном режиме работы оборудования, а остальные — ведомыми, которые запускаются при повышении нагрузки или при других условиях, предусмотренных общим алгоритмом. При таком использовании частотный преобразователь, кроме основных функций регулирования частоты вращения асинхронного электродвигателя переменного тока, также выполняет роль программируемого логического контроллера PLC, управляющая программа работы которого может быть написана на языке высокого уровня или задаваться с помощью специальных ограниченно изменяемых наборов параметров. Но такое использование подходит для простых систем с минимальным количеством датчиков, в более сложных системах могут применяться внешние ПЛК контроллеры, например, Siemens, Delta, Mitsubishi или специальные платы управления процессом, такие как Prom Electric Proccess Control, купить которую можно на нашем сайте в разделе Магазин. Специализированные платы имеют больше возможностей в реализации нестандартных алгоритмов работы уже используемого оборудования, так как программа может быть написана на языках низкого уровня — Assembler, C, максимально близких к аппаратным средствам. Это позволяет оптимизировать программный код и ускорить как работу оборудования в целом, так и обработку нестандартных протоколов обмена данных с внешней электроникой, в том числе с промышленными компьютерами, устройствами интерфейса пользователя — панелями оператора HMI и т. д.
Настройка частотного преобразователя состоит из следующих работ:
- составление общего алгоритма работы, необходимо в случае выхода из строя преобразователя и отсутствии преобразователя той же модели или повреждении микросхемы памяти, микроконтроллера с сохраненной программой управления, то есть для внедрения в существующую систему автоматики нового частотного преобразователя или его модернизация, а также в случае разработки электроники для нового промышленного оборудования;
- расчет необходимых уставок защит преобразователя и нагрузки, необходимо в случае замены, перемотки двигателя или при разработке оборудования;
- программирование частотного преобразователя — запись рассчитанных параметров в энергонезависимую память через панель или, при отсутствии панели, через порт связи RS-485, RS-232, USB с помощью ПК. В редких случаях, например, при отсутствии панели управления и платы интерфейсов, возможна прошивка непосредственно микроконтроллера или микросхемы памяти преобразователя частоты с помощью специализированного программатора;
- подключение тестовой схемы, проверка устойчивой работы преобразователя и внешних цепей в различных режимах работы, при необходимости отладка и изменения в схеме подключения или тексте управляющей программы;
- установка частотного преобразователя и наладка на объекте, проверка режимов работы, добавление неучтенных изначально функций;
- периодический осмотр, снятие рабочих электрических характеристик, таких как стабильность выходной частоты, симметричность токов на входе и выходе преобразователя и сравнение величин с изначальными, проверка температурного режима, а также техническое обслуживание преобразователей частоты.
Отправьте запрос на [email protected] и получите подробные условия работы.
Наши услуги:
prom-electric.ru
Частотный преобразователь — принцип работы, схема подключения частотника
Чтобы подключить частотник к асинхронному трёхфазному двигателю, следует хотя бы на минимальном уровне разбираться в схеме его подключения и принципах работы. Нижеприведённая информация позволяет изучить данную тему.
Принцип управления электродвигателем
Ротор электрического двигателя функционирует благодаря вращению электромагнитных полей под статорной обмоткой. Скорость движения ротора находится в зависимости от промышленной частоты питающей сети.
Стандартное её значение составляет 50Гц и вызывает соответственно пятьдесят колебательных периодов за секунду. На протяжении минуты количество оборотов увеличивается до трёх тысяч. Настолько же часто осуществляются обороты ротора подвергаемого воздействию электромагнитных полей.
При изменении уровня прилагаемой к статору частоты, появляется возможность управления вращательной скоростью ротора и соединяемого с ним привода. Именно благодаря этому принципу осуществляется управление электродвигателем.
Классификация частотных преобразователей
По своим конструктивным различиям модели частотного преобразователя делятся на:
Индукционные.
Сюда относятся электрические двигатели имеющие асинхронный принцип работы. Данные устройства не отличаются высоким уровнем КПД и значительной эффективностью. Ввиду этих качеств они не имеют большой доли в общем числе преобразователей и редко применяются.
Электронные.
Пригодны для осуществления плавного управления оборотами в машинах асинхронного и синхронного типа. Управление в электронных моделях может производиться двумя способами:
Скалярный (согласно предварительно введённым параметрам взаимозависимости вращательной V и частоты).
Наиболее простой подход к управлению, довольно неточный.
Векторный.
Отличительной характеристикой является точность управления.
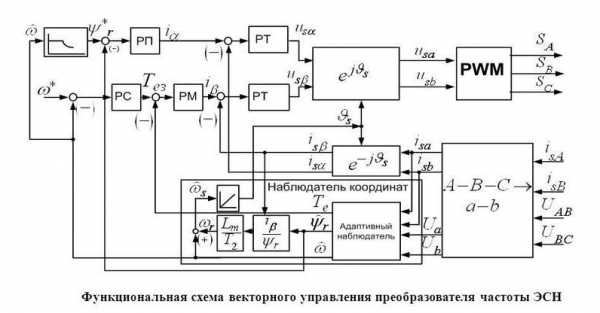
Векторное управление преобразователем частот
Принцип работы векторного управления заключается в следующем: при нём оказывается воздействие на магнитный поток, изменяя направление его «пространственного вектора» и регулирующий роторную частоту поля.
Создать рабочий алгоритм частотного преобразователя с векторным управлением можно при помощи двух способов:
Бессенсорное управление.
Осуществляется за счёт назначения зависимостей чередования между последовательностями широтно-импульсных модуляций инвертора для предварительно составленных алгоритмов. Регуляция размера амплитуды и выходной частоты, которую имеет напряжение, осуществляется в соответствии со скольжением и нагрузочным током, но обратная связь от роторной вращательной скорости не учитывается.
Потокорегулирование.
Рабочие токи устройства регулируются. При этом они раскладываются на активный и реактивный компонент. Это облегчает возможность внесения корректирующих изменений в рабочий процесс (изменение амплитуд, частот, векторных углов, которые имеет напряжение на выходе).
Способствует повышению точности и диапазона регуляции вращений асинхронного двигателя. Весьма актуален такой подход для устройства с малыми оборотами и высоким уровнем двигательных нагрузок.
В целом, схема векторного управления более прочих подходит для динамической регулировки вращающегося момента трёхфазного асинхронного двигателя.
Подключение транзисторных ключей
Все шесть IGBT-транзисторов соединяются с соответствующими диодами обратного тока с соблюдением встречно-параллельной схемы. После по цепи силового подключения, образуемой каждым транзистором происходит прохождение активного тока асинхронного двигателя, с последующим направлением его реактивной составляющей через диоды. С целью обеспечения безопасности инвертора и асинхронного двигателя от воздействия сторонних электрических помех конструкция преобразователя частоты может включать в себя помехозащитные фильтры. Если промышленные источники постоянного тока имеют рабочее напряжение в 220 В, то они также могут использоваться для запитывания инверторов.
Как подключить частотник к асинхронному двигателю?
Используемый для управления частотой напряжения преобразователь зачастую используется для энергоснабжения трёхфазных двигателей. С помощью преобразователя частоты также возможно обеспечить присоединение такого устройства к однофазной сети, предотвратив снижение его рабочей мощности. Этим они значимо выигрывают у конденсаторов, которые при подключении не могут сохранить исходный уровень мощности. Подробней про применение частотника для трехфазника- смотрите здесь.
При подключении частотного преобразователя следует предварительно разместить автоматический выключатель, функционирующий от тока сети по значению равного номинальному (или наиболее близкого к таковому) уровню потребления тока в двигателе. Если используется частотник трёхфазного типа, то соответственно следует воспользоваться трёхфазным автоматом с общим рычагом. Такой вариант обеспечивает быстрое обесточивание всех фаз сразу при замыкании на одной из них.
Ток срабатывания по своим характеристикам должен совпадать с однофазным током электрического двигателя.
В случае же, если для частотного преобразователя свойственно однофазное питание, то следует применить одинарный автомат, который подходит для работы с утроенным однофазным током.
Однако, при любых обстоятельствах установку частотного преобразователя нельзя осуществлять через включение автомата в месте разрыва нулевых или заземляющих проводов. В таких условиях подразумевается только прямое включение автомата.
Дальнейшую настройку преобразователя частоты осуществляют через соединение с контактами электрического двигателя. Используются при этом фазные провода. Но предварительно производится соединение обмоток электрического двигателя по схеме «звезда» или «треугольник».
Работа по той или иной схеме базируется на том, каков тип преобразователя частоты и характер производимого им напряжения.
По стандарту корпус каждого двигателя имеет отметку с двумя значениями, которым может равняться напряжение. Если частотник продуцирует напряжение соответствующее нижней границы, то соединение осуществляется по типу «треугольник». В остальных случаях для использования принцип «звезды».
Месторасположение управляющего пульта, обязательно прилагающегося при покупке частотного преобразователя, следует подбирать тщательно, чтобы обеспечить наибольшее удобство пользования.
Подключения пульта управления осуществляется по схеме обозначенной в прилагаемой к преобразователю инструкции. После рукоятка фиксируется на нулевом уровне, и автомат включается. В этот момент должно наблюдаться свечение светового индикатора.
Для использования частотного преобразователя, следует надавить кнопку «RUN» (она уже запрограммирована надлежащим образом). Далее делается лёгкий поворот рукоятки, провоцирующий старт постепенного вращения электрического двигателя. Если вращение осуществляется в направлении, противоположном необходимому, то следует нажать реверс. После при помощи рукоятки настраивается требуемая частота вращения устройства. При этом следует учитывать, что на корпусе пульта управления зачастую прописаны не уровни частоты вращения двигателя, выражаемые в оборотах в минуту, а частоты, которую имеет питающее напряжение, выражаемое в герцах.
Чтобы ограничить пусковой ток и снизить пусковой момент в момент пуска асинхронного двигателя с уровнем мощности больше 5000Вт, используется подключение типа «звезда-треугольник». До достижения номинала скорости задействуется схема подключения частотного преобразователя «звезда», а после питание осуществляется по схеме «треугольник». В момент переключения уровень пускового тока уменьшается в три раза относительно прямого пуска. При начале работы по второй схеме до момента разгона двигателей ток возрастёт до уровня прямого пуска. Такой варианты наиболее актуален для, имеющих большую маховую массу, позволяя после разгона сбросить нагрузку.
Логично, что использование такой схемы возможно только с двигателями, рассчитанными на подключения обоих типов.
Проведение работы по схеме «звезда-треугольник» всегда чревато резкими скачками уровня тока в противовес плавному нарастанию в условиях прямого пуска. В момент смены соединения скорость резко снижается и увеличить её можно только увеличив силу тока.
Частотный преобразователь.Как подключить трёхфазный электродвигатель от 220В.

Watch this video on YouTube
chistotnik.ru
Установка частотных преобразователей | ТехКранМонтаж
Дополнительная комплектация грузоподъемного оборудования предусматривает монтаж частотного преобразователя (ЧП). Достаточно часто возникают вопросы, что это? Зачем он нужен? В чем заключаются преимущества его использования?
Установка частотных преобразователей
Дополнительная комплектация грузоподъемного оборудования предусматривает монтаж частотного преобразователя (ЧП). Достаточно часто возникают вопросы, что это? Зачем он нужен? В чем заключаются преимущества его использования?
Понятие, область применения
Частотный преобразователь – электронное устройство, применяемое для управления электродвигателем (синхронным/асинхронным) переменного тока. Почему частотный? Преобразователь регулирует скорость вращения двигателя путем изменения частоты подаваемого напряжения. Другими словами, ЧП преобразует стандартное напряжение сети 380В с обычной частотой 50Гц, в импульсное, формирующее в двигателе синусоидальный ток с частотой 0-400Гц или выше. Более того, установка данного электронного устройства, позволяет подключать трехфазный электродвигатель к однофазной сети, исключая потерю мощности.
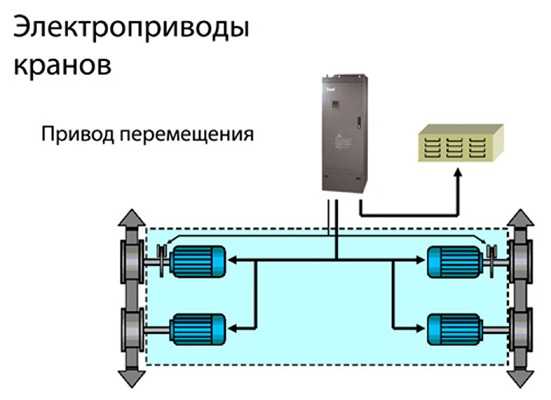
Установка частотных преобразователей осуществляется на козловые, мостовые, консольные, башенные краны, тельферы электрические, кран-балки. В зависимости от преследуемых производственных целей, возможен перевод на частотное регулирование электроприводов:
- Механизмов подъема груза.
- Механизмов горизонтального перемещения грузовой тележки, крана, тельфера.
- Комплексный перевод на частотное управление, предусматривающий регулирование механизмами горизонтального передвижения и подъема.
Как правило, ЧП интегрируется в систему крана без изменения уже имеющегося оборудования. Дополнительно устанавливается шкаф (для преобразователя) и при необходимости: тормозные резисторы (устройства динамического торможения) и фильтры (снижают уровень помех, обеспечивают корректную работу преобразователя частоты). Следует отметить, современные модели ЧП, в большинстве случаев, оснащаются штатными фильтрами.

Преимущества использования ЧП
Подключение частотного преобразователя позволяет значительно расширить функциональные возможности системы управления, повысить надежность и продлить срок эксплуатации крана, а также сократить расход электроэнергии.
Расширение возможностей системы управления заключается:
- В плавном разгоне/торможении, исключая раскачивание груза.
- В широком диапазоне регулирования скоростью от 0 до номинального значения и выше.
- В возможности синхронного управления несколькими двигателями от одного преобразователя.
Надежность и безотказная работоспособность крана:
- Значительно упрощается электрическая схема управления.
- В пусковом/рабочем режиме ток ограничивается в пределах номинального значения.
- Защита электрооборудования крана, сообщение о причинах аварийной остановки.
- Плавный разгон/торможение снижают нагрузки на металлоконструкции крана и его механическое оборудование.
Возможность экономии электроэнергии, обуславливается способностью ЧП уменьшать амплитуду питающего напряжения, что позволяет поддерживать постоянный момент нагрузки на двигателе. Помимо этого, установив рекуперативные системы, можно возвращать энергию полученную от торможения обратно в сеть.
Программирование и настройка ЧП
Программирование частотных преобразователей может осуществляться посредством компьютера, через цифровые интерфейсы, например: CAN, USB, RS485 и т.д. Также с их помощью появляется возможность управлять электроприводами удаленно и производить синхронизацию устройств.
Помимо этого, настройка частотного преобразователя выполняется с панели управления. Функциональные возможности зависят от конкретной модели. Обычно параметры управления разбиты на группы: например: нагрузка на двигатель, настройка входов/выходов, параметры сети и многое другое. Дополнительно могут предусматриваться и специальные функции, необходимые для регулирования конкретных моделей двигателей. В случае введения ошибочных или некорректных данных, есть возможность сброса до заводских настроек.
Особо следует отметить, настройка/программирование преобразователей осуществляется строго по инструкции, прилагаемой к каждой модели.
Выбирая модель частотного преобразователя, необходимо исходить из мощности и типа двигателя. Также учитываются: точность и диапазон регулирования скорости, время замедления и разгона, особенности эксплуатации. Если вы затрудняетесь и не можете определиться с выбором ЧП, специалисты «ТехКранМонтаж» всегда придут «на помощь» и посоветуют оптимальную модель для вашего крана.
remcran.ru
Выбор частотного преобразователя
Частотный преобразователь (регулируемый электропривод) обеспечивает две его основные и взаимосвязанные функции: управление технологическим процессом рабочей установки в соответствии с предъявляемыми к нему требованиями и электромеханическое преобразование энергии с максимальной ее эффективностью. Реализация этих функций требует особого подхода к выбору и эксплуатации регулируемого электропривода по сравнению с нерегулируемым. Теоретические аспекты такого подхода хорошо известны специалистам в области автоматизированного электропривода (АЭП), Однако, за последние годы произошло заметное сокращение числа специализированных проектных организаций и отток из них наиболее квалифицированных специалистов в области электропривода. Исчезла согласованность проектных и наладочных организаций, их разобщенность стала приводить к повторным ошибкам, а опыт ввода в эксплуатацию электроприводов стал практически (по конъюнктурным соображениям) ограничен для других специалистов.
Обоснование мощности н типа электрических двигателей и частотных преобразователей.
Регулирование технологических координат с высокой статической и динамической точностью требует от электропривода дополнительного запаса по его динамической мощности. Последняя должна выбираться с учетом его реальных нагрузочных диаграмм, включая и динамические составляющие моментов, связанные с изменением приведенного к валу электродвигателя момента инерции. При модернизации электропривода, связанной с заменой одного типа привода на другой, следует учитывать и разницу в перегрузочных способностях по току, моменту и моментах инерции заменяемых электродвигателей. Наиболее актуальны эти замечания для приводов, работающих в повторно-кратковременных режимах работы и на валу которых по технологии рабочей установки имеют место скачкообразные изменения нагрузок.
Распространенной ошибкой является выбор мощности частотного преобразователя питающего электродвигатель по реальной эксплуатационной мощности этого же двигателя в разомкнутой системе управления. При этом из-за ограничения максимально допустимого тока преобразователя возникает проблема обеспечения требуемых динамических показателей привода при введении обратных связей по регулируемым координатам.
Выбор частотных преобразователей на технологическую мощность привода, заметно меньшую номинальной установленной мощности электродвигателя, усугубляет и проблему автоматической идентификации значений его параметров и параметров регуляторов системы управления электроприводом с помощью встроенного в преобразователи их программного обеспечения. При несовпадении предварительно установленных граничных значений параметров двигателя близкого по мощности преобразователю его программное обеспечение либо указывает на невозможность идентификации параметров электродвигателя и блокирует работу преобразователя совместно с двигателем, либо вносит заметные погрешности в свою математическую модель двигателя, на основе которой вычисляются режимы работы и ограничения переменных электропривода. В итоге динамические показатели и эксплуатационная надежность электропривода снижаются.
При выборе частотных преобразователей, работающих в регулируемом электроприводе с высоко динамичными и повторно-кратковременными режимами, не редко игнорируется необходимость обеспечения рекуперации энергии со стороны электродвигателя в питающую сеть, либо на активную нагрузку. Такие преобразователи должны иметь либо двухсторонний обмен энергией между двигателем и питающей преобразователь сетью (ПЧ с непосредственной связью, на основе автономных инверторов тока, с блоком рекуперации на входе инвертора), либо иметь дополнительный резистор для сброса на него рекуперируемой энергии. Создание многодвигательного привода с единой шиной постоянного тока для питания инверторов ПЧ и установкой общего инвертора постоянного тока на неполную суммарную мощность привода способствует решению подобной проблемы. Понятно, что стоимость таких преобразователей возрастает, но технология работы установок и особенно требования их экстренного останова при аварийных режимах или опасности жизнедеятельности обслуживающего персонала вынуждает идти на дополнительные затраты.
Регулирование скорости привода переменного тока отражается и на ухудшении условий охлаждения электродвигателей с самовентиляцией при уменьшении их скорости. Российская электротехническая промышленность, к сожалению, отстает от производства специальных машин переменного тока при их питании от управляемых ПЧ. В итоге это заставляет либо увеличивать установленную мощность двигателей, либо решать в экстренных ситуациях проблему их дополнительного охлаждения.
Одна из особенностей питающих сетей крупных металлургических комбинатов России связана с тем, что их номинальное напряжение достигает 10 кВ. Это создает заметные трудности при замене нерегулируемого электропривода переменного тока на регулируемый, поскольку в отечественной промышленности отсутствует выпуск ПЧ с выходным напряжением до 10 кВ. Актуальность их создания весьма велика.
Для мощных технологических установок, где окружающая среда отличается повышенной влажностью или наличием токопроводящих Частиц, наметилась тенденция заказа со стороны эксплуатационного персонала низковольтного исполнения электропривода. Подобное решение способствует заметному снижению эксплуатационных затрат на его обслуживание при увеличении надежности и безопасности электрооборудования.
Согласование преобразователей частоты с питающей их сетью и электродвигателем.
Возможность резких колебаний и искажений напряжения и тока питающей преобразователи сети из-за коммутационных режимов (включении и отключении питающего преобразователь трансформатора, коммутации вентилей и т.п.) заставляет принимать специальные защитные меры по ограничению их влияния на работу преобразователя и системы его управления. К числу подобных мер относятся установка на входе преобразователя силовых токоограничивающих реакторов, защитных RC-цепей или варисторов. Актуальность обоснования и выбора их параметров сохраняется и до сих пор.
Особенно это проявляется при замене отечественных преобразователей на преобразователи иностранных фирм, когда сохраняются питающая сеть со всеми реальными для нее отклонениями напряжения и основные силовые элементы отечественного производства (трансформаторы, коммутационная аппаратура, электродвигатели) с параметрами (индуктивностью, емкостью, временем коммутации и т.п.), отличающимися от зарубежных.
Наличие промежуточного повышающего трансформатора на выходе ПЧ для питания электродвигателя с более высоким напряжением на статоре, чем выходное напряжение преобразователя, создает ряд проблем, связанных с дополнительным нагревом этого трансформатора из-за высокочастотных составляющих выходного тока преобразователя, с первоначальным пуском двигателя и выбором начальной частоты и выходного напряжения преобразователя. Они усиливаются для технологических установок с активным моментом сил сопротивления и требующих по технологии применения структур векторного управления электроприводом.
Внедрение ПЧ с широтно-импульсной модуляцией его выходного напряжения сопровождается усилением требований к состоянию изоляции силовых цепей элементов электропривода и возможности использования старых кабелей связи при реконструкции привода. Высокочастотные составляющие выходного напряжения преобразователей вынуждают устанавливать на их выходе либо дополнительные фильтры, либо ограничивать длину кабельных линий между преобразователем и двигателем для ограничения перенапряжений на силовых полупроводниковых ключах преобразователя. Заметно возросла и актуальность контроля изоляции силовых цепей электропривода с помощью специализированных устройств.
Для привода ряда механизмов (насосов, компрессоров, дутьевых вентиляторов и т.п.) по технологическим и экономическим соображениям часто закладываются требования управляемого пуска асинхронного двигателя до его номинальной скорости с последующим подключением двигателя на питающую сеть, или обратно от сети к ПЧ для управляемого режима торможения. Такие переключения могут сопровождаться заметными и, часто недопустимыми, изменениями тока в силовой цепи питания и скорости двигателя. Особенно это сказывается при больших нагрузках и малых моментах инерции привода, Для подобных режимов работы электропривода используется способ переключения с «перекрытием», когда асинхронный двигатель кратковременно подключается и к сети и к преобразователю частоты одновременно. При этом для достижения равенства частоты, амплитуды и синфазности выходного напряжения преобразователя с напряжением питающей сети в системе управления ПЧ должен предусматриваться специальный блок синхронизации, а для ограничения уравнительных токов между ПЧ и сетью устанавливаться разделительный дроссель.
Для регулируемого электропривода подъемно-транспортных механизмов (кранов, слитковозов и т.п.) могут возникать проблемы, связанные с кратковременными прерываниями тока в силовых цепях подключения статорных обмоток асинхронного электродвигателя к выходу ПЧ посредством контактных проводов (троллеев) через скользящие токосъемники, При работе ПЧ со скалярной системой управления координатами электродвигателя подобное прерывание тока лишь в одной его фазе не приводит к аварийным режимам и останову привода. При длительном прерывании тока в одной фазе электродвигателя из-за асимметрии его напряжения питания увеличиваются потери в двигателе и, при нагрузке на его валу, уменьшается частота вращения. В итоге ПЧ будет отключен со стороны защиты двигателя по превышению его температуры. При работе ПЧ с векторной системой управления координатами электродвигателя кратковременное прерывание тока в одной из фаз вызывает аварийное отключение привода и его останов. Кратковременное двухфазное прерывание питания электродвигателя в скользящих токосъемниках приводит, как правило, к отключению преобразователя по его максимально-допустимому току при последующем восстановлении питания двигателя, Для подобных режимов необходимо в программное обеспечение системы управления преобразователем включать либо возможность его автоматического повторного включения или “самоподхвата», при котором используется кинетическая энергия вращения ротора двигателя.
Наладка частотного преобразователя.
Развитие микропроцессорных систем управления электропривода позволяет получать весьма качественные его показатели, однако их техническая реализация требует и более глубокой информации о реальных параметрах элементов электропривода. К сожалению, в отечественных каталогах и паспортных данных на электрооборудование все реже можно найти данные по активным и реактивным сопротивлениям электрических обмоток двигателей, их тепловых постоянных времени, моментов инерции и т. п., т. е. по тем параметрам, которые должны вводиться в программное обеспечение системы управления электропривода. Отсутствие численных значений ряда параметров силовой части электропривода, которые должны вводиться в математическую модель электродвигателя, заметно ограничивает качество настройки и надежность работы электропривода. Поэтому во многих преобразователях предусмотрен режим идентификации этих параметров и автоматической настройки параметров регуляторов системы управления вводимого в эксплуатацию электропривода. Следует отметить, что настройка параметров регуляторов носит, как правило, «ориентировочный» характер, обеспечивая лишь устойчивость замкнутой системы регулирования выходных координат. Затем, при необходимости увеличения динамических показателей электропривода, параметры регуляторов должны корректироваться более качественно уже наладочным персоналом.
Увеличению точности и стабильности систем управления электропривода; их эксплуатационной надежности и снижению затрат на обслуживание способствуют идеология анализа и синтеза цифровых систем по подобию аналоговых систем управления; возможность реализации на их основе не только структур подчиненного регулирования координат электропривода, но и иных технологически обусловленных структур, например с переключающимися обратными связями, с системами по принципу фаззи-логики, нейронными системами и т. п.
Выбор структуры управления электропривода во многом определяет его конечные показатели регулирования. Для частотно-регулируемого асинхронного электропривода наиболее распространен скалярный принцип управления его координатами. Ему свойственна техническая простота измерения и регулирования переменных электродвигателя, а также возможность построения как замкнутых, так и разомкнутых систем управления его скоростью. Основной недостатком скалярного управления в трудности реализации желаемых законом регулирования момента и высоких динамических показателей регулирования координат электропривода, Поэтому для приводов, где по технологии требуется максимальное быстродействие при регулировании его координат и управление моментом электропривода, применяется векторное управление его координатами.
Наличие в программном обеспечении преобразователей стандартных функциональных модулей, позволяющих при наладке электропривода оперативно менять структуру и алгоритмы его управления в соответствии с возможными коррекциями технологических режимов его работы, способствует увеличению качества их настройки. На основе функциональных модулей могут быть реализованы и системы логического управления электроприводом, блокировок, защит и диагностирования работоспособности привода. При этом процедура построения и программирования функциональных модулей, представленных в цифровой форме преобразования сигналов, должна быть близка к широко понятной эксплуатационным персоналом аналоговой форме их реализации. Подобное решение имеет место для многих зарубежных преобразователей, где функциональные блоки объединяются между собой аналоговыми и логическими “соединителями», кодируемыми численными номерами.
Обеспечение электромагнитной совместимости частотного преобразователя.
Уменьшение мощности управления при резком увеличении динамических свойств элементов, роста мощности и числа дискретных преобразователей заметно обострили проблему электромагнитной совместимости (ЭМС) элементов АЭП и АСУТП. Проблема усугубляется и частым игнорированием ее специалистами, непосредственно отвечающими за функционирование АЭП и АСУТП — проектантами, конструкторами, службами электромонтажа, наладки и эксплуатации.
Распространенной ошибкой с позиций обеспечения ЭМС элементов АЭП в последнее время стало применение неэкранированных силовых кабелей между ПЧ и электродвигателем. Способствует этому и отсутствие выпуска в отечественной промышленности силовых кабелей, имеющих экранированную оболочку с внешним изоляционным слоем и специально предназначенных для работы с мощными ПЧ. В итоге приходиться пользоваться зарубежной кабельной продукцией с весьма высокими на нее ценами.
Обеспечения работоспособности электропривода связано и с необходимостью диагностирования его технического состояния в условиях промышленной эксплуатации АЭП. Кроме общепринятых и программно реализованных в устройствах управления ПЧ систем диагностирования собственно электроприводов, для контроля внешних устройств управления электроприводом и технологических режимов его работы целесообразно сопровождать эти системы видеотерминальными устройствами наблюдения и записи контролируемых координат со встроенными в них дополнительными программами диагностирования. Так, для управления технологическими режимами и диагностирования технического состояния асинхронного частотно-регулируемого электропривода резиносмесителя MX-2 специалистами ОАО «Электропривод» и кафедры электропривода МЭИ была разработана и внедрена видеотерминальная станция, работающая в режиме реального времени и обеспечивающая регистрацию, визуализацию и архивацию основных координат электропривода, в том числе и в аварийных ситуациях.
Литература:
АЭП-2007
Наши услуги:
prom-electric.ru
Схема подключения частотного преобразователя
Частотный преобразователь используется для изменения частоты напряжения, питающего трехфазный двигатель. Кроме того, частотник позволяет подключить трехфазный электрический двигатель к однофазной сети без потерь мощности. В случае, когда для этих целей применяются конденсаторы, последнее невыполнимо.
Подключение частотника предполагает размещение перед ним автоматического выключателя, работающего с током, равным номинальному (или ближайшему большему в ряду номинальных токов автоматов) потребляемому току двигателя. Если ПЧ адаптирован на работу от трехфазной сети, необходимо задействовать трехфазный автомат, имеющий общий рычаг. Такой подход позволяет в случае короткого замыкания одной из фаз оперативно обесточить и все остальные фазы. Характеристики тока срабатывания должны полностью соответствовать току одной фазы электрического двигателя. Если же частотник предназначен для однофазного питания, имеет смысл применить одинарный автомат, рассчитанный на утроенный ток одной фазы. В любом случае, установка частотника не должна осуществляется путем включения автоматов в разрыв нулевого или заземляющего провода. Здесь подключение выполняется только напрямую.
Далее настройка преобразователя частоты предусматривает присоединение его фазных проводов к соответствующим контактам электрического двигателя. Перед этим необходимо соединить в электродвигателе обмотки по схеме «треугольник» или «звезда». Конкретный тип соединения определяется характером напряжения, вырабатываемого непосредственно преобразователем частоты.
Как правило, на корпусе двигателя приведены два значения напряжения. В ситуации, когда вырабатываемому частотником напряжению соответствует меньшее из указанных, необходимо применить схему «треугольник». В противном случае обмотки соединяются по принципу «звезды».
Пульт управления, входящий в комплект поставки частотного преобразователя, располагают в удобном месте. Подключить его необходимо согласно схеме, приведенной в инструкции к ПЧ. Далее рукоятка устанавливается в нулевое положение и выполняется включение автомата. При этом на пульте загорается световой индикатор. Для работы преобразователя необходимо нажать кнопку «RUN» (запрограммировано по умолчанию). Затем необходимо немного повернуть рукоятку, чтобы электродвигатель начал постепенное вращение. В случае, если двигатель вращается в противоположную сторону, нажимается кнопка реверса. Далее следует настроить рукояткой необходимую частоту вращения. Важно учесть, что на пультах многих частотников отображается не частота вращения электрического двигателя (об/мин), а частота питающего электродвигатель напряжения, выраженная в герцах.
Схема подключения частотного преобразователя

Если у Вас остались вопросы по подключению и настройке преобразователей, обращайтесь за помощью к нашим техническим специалистам. Также предлагаем ознакомиться с каталогом частотных преобразователей Siemens и Prostar.
Другие полезные материалы:
Как правильно подобрать электродвигатель
Редуктор от «А» до «Я»
Как выбрать мотор-редуктор
Общие сведения об устройствах плавного пуска
tehprivod.ru
