Преобразователь частоты. Выбор и расчет преобразователя частоты для электродвигателя.
Выбор преобразователя частоты
При определении характеристик преобразователя частоты для заданной нагрузки первым шагом является рассмотрение нагрузочных характеристик. Существуют четыре различных способа расчета требуемых выходных параметров, при этом выбор способа зависит от характеристик электродвигателя.
Нагрузочные характеристики
Прежде чем определить типоразмер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми нагрузочными характеристиками. Нагрузочные характеристики различаются между собой следующим образом:
Рис. 1. Постоянный и квадратичный нагрузочный момент
• Когда скорость центробежных насосов и вентиляторов увеличивается, потребляемая мощность возрастает в третьей степени (Р = n3).
• Обычный рабочий диапазон центробежных насосов и вентиляторов лежит в пределах скоростей от 50 до 90 %. Коэффициент нагрузки возрастает пропорционально квадрату скорости, т. е. приблизительно от 30 до 80 %.
Оба эти фактора проявляются в характеристиках крутящего момента электродвигателя, управляемого преобразователем частоты.
На рис 2 и 3 показаны характеристики крутящего момента для двух типоразмеров преобразователей частоты, один из них (рис. 3) имеет меньший диапазон мощности, чем другой. Для обеих характеристик крутящего момента были заданы одинаковые нагрузочные характеристики центробежного насоса.
На рис. 2 весь рабочий диапазон насоса (0-100 %) находится в пределах номинальных значений параметров двигателя. Поскольку обычный рабочий диапазон насоса находится в пределах 30-80 %, можно выбрать преобразователь частоты с меньшей выходной мощностью.
Рис. 2. Преобразователь частоты большой мощности
Рис. 3. Преобразователь частоты малой мощности
Если нагрузочный момент постоянен, электродвигатель должен быть способен развивать крутящий момент, превышающий нагрузочный момент, поскольку избыточный крутящий момент используется для разгона.
Для разгона и обеспечения высокого начального момента, например в случае привода ленточных транспортеров, достаточен кратковременный перегрузочный момент, составляющий 60 % от момента, развиваемого преобразователем частоты. Перегрузочный крутящий момент также обеспечивает системе способность преодолевать внезапные увеличения нагрузки. Преобразователь частоты, который не допускает никакого перегрузочного момента, должен выбираться таким образом, чтобы ускоряющий крутящий момент (TB) находился в пределах номинального крутящего момента.
Рис. 4. Перегрузочный крутящий момент используется для разгона
При определении нагрузочных характеристик рассматриваются четыре разных набора технических характеристик электродвигателя, позволяющие принять решения относительно выбора типоразмера преобразователя частоты по мощности.
1. Преобразователь частоты можно выбрать быстро и точно на основе значения тока lM, который потребляет электродвигатель. Если электродвигатель загружается не полностью, его ток может быть измерен при работе аналогичной системы с полной нагрузкой.
Рис. 5. Выбор преобразователя частоты на основе номинального тока
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3 х 400 В потребляет ток 14,73 А.
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительный максимальный выходной ток больше или равен 14,73 А при постоянной или квадратичной характеристике крутящего момента.
Примечание:
Если преобразователь частоты выбирается на основе мощности (способы 2-4), необходимо сравнить расчетную мощность и мощность, указанную в технических данных преобразователя частоты, при одном и том же напряжении. Если преобразователь частоты рассчитывается на основе тока (способ 1), этого не требуется, поскольку выходной ток преобразователя частоты влияет на другие данные.
2. Преобразователь частоты можно выбирать на основе полной мощности SM, потребляемой электродвигателем и полной мощности, подаваемой преобразователем частоты.
Рис. 6. Выбор преобразователя частоты на основе полной мощности
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3×400 В потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400 х 14.73 √3 / 1000= 10,2 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь частоты, у которого длительная максимальная выходная мощность больше или равна 10,2 кВА при постоянной или квадратичной характеристике крутящего момента.
3. Преобразователь частоты можно также выбирать по мощности Рм, вырабатываемой электродвигателем. Однако данный способ является неточным, поскольку cos φ и коэффициент полезного действия η изменяются с нагрузкой.
Рис. 7. Выбор преобразователя частоты на основе стандартной серии электродвигателей
Пример расчета мощности электродвигателя
Электродвигатель мощностью 3 кВт, имеющий cos φ = 0,80 и η = 0,81, потребляет мощность SM= PM/(η х cos φ) = 3,0 / (0,80 х 0,81 )=4,6 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительная максимальная выходная мощность больше или равна 4,6 кВА при постоянной или квадратичной характеристике крутящего момента.
4. На практике номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных электродвигателей. Поэтому преобразователи частоты часто выбирают исходя именно из этого соображения, что, однако, может привести к неточному определению их характеристик, особенно если электродвигатель не нагружается полностью.
Рис. 8. Выбор преобразователя частоты по выходной мощности на валу
Распределение тока в преобразователе частоты (cos φ (фи) электродвигателя)
Ток для намагничивания электродвигателя подается конденсатором, находящимся в промежуточной цепи преобразователя частоты. Ток намагничивания представляет собой реактивный ток, который протекает между конденсатором и электродвигателем (рис. 9).
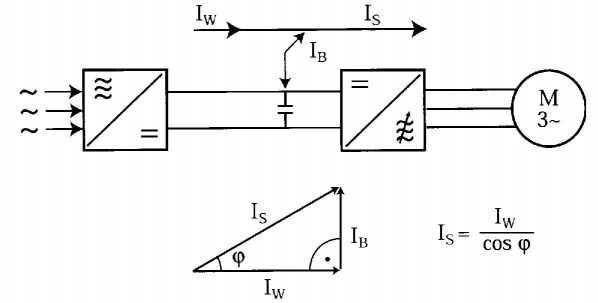
Рис. 9. Токи в преобразователе частоты
Из сети поступает только активный ток (lW). Именно поэтому выходной ток преобразователя частоты всегда больше входного тока. Кроме активного тока из сети потребляется ток Iloss, (ток потерь).
Пример расчета
При отсутствии нагрузки ток 4-полюсного электродвигателя мощностью 1,1 кВт равен 1,6 А. Выходной ток подключенного преобразователя частоты составляет около 1,6 А, а входной ток при работе без нагрузки почти равен нулю.
Изготовители электродвигателей обычно указывают cos φ электродвигателя при номинальном токе. При меньшем значении cos φ (например, в случае реактивного синхронного электродвигателя) номинальный ток электродвигателя при одинаковых значениях мощности и напряжения будет больше, как видно из следующего уравнения:
IS = IW/ cos φ
Если преобразователь частоты выбирается по номинальному току электродвигателя (способ 1), то снижения номинального крутящего момента электродвигателя не происходит.
Конденсатор, подключенный к клеммам электродвигателя для компенсации реактивного тока, необходимо удалить. Ввиду высокой частоты коммутации преобразователя частоты конденсатор ведет себя как короткозамкнутая цепь и вызывает существенное увеличение тока электродвигателя. Преобразователь воспримет это как замыкание на землю или короткое замыкание и отключится.
Управление скоростью электродвигателя
Выходная частота преобразователя частоты и, следовательно, скорость электродвигателя управляются одним или несколькими сигналами (0-10 В, 4-20 мА или импульсами напряжения). Когда подается сигнал на увеличение скорости, скорость электродвигателя возрастает, и вертикальная часть характеристик крутящего момента электродвигателя сдвигается вправо (рис. 10).
Рис. 10. Зависимость между управляющим сигналом и характеристиками крутящего момента электродвигателя
Если нагрузочный момент меньше, чем номинальный крутящий момент электродвигателя, скорость достигнет требуемого значения. Как показано на рис. 11, нагрузочные характеристики пересекаются с характеристиками крутящего момента электродвигателя в вертикальной части (в точке А). Если пересечение происходит в горизонтальной части (точка В), скорость электродвигателя не может длительное время превышать соответствующее значение, Преобразователь частоты допускает превышение предельного тока короткого замыкания без отключения (точка С), но продолжительность превышения обязательно должна быть ограничена по времени.
Рис. 11. Ток электродвигателя может в течение короткого времени превышать предел по току
Рампы разгона и торможения
Характеристика (рампа) разгона показывает темп, с которым происходит увеличение скорости вращения, и задается в виде времени разгона tacc. Эти рампы базируются, главным образом, на номинальной частоте электродвигателя, например, рампа разгона 5 с означает, что преобразователю частоты потребуется 5 секунд для перехода от нулевой до номинальной частоты электродвигателя (f = 50 Гц).
Рис. 12. Время разгона и торможения
Рампа торможения показывает, насколько быстро снижается скорость. Она задается в виде времени торможения tdec.
Возможен непосредственный переход от разгона к торможению, поскольку электродвигатель всегда отслеживает выходную частоту инвертора.
Если известен момент инерции вала электродвигателя, можно вычислить оптимальные значения времени разгона и торможения.
tacc= J x (n2-n1)/[(Tacc – Tfric
) x 9,55]tdec = J x (n2-n1)/[(Tacc + Tfric) x 9,55]
J — момент инерции вала электродвигателя.
Tfric – момент трения системы.
Тасс — избыточный (перегрузочный) момент, используемый для разгона.
Tdec — тормозящий момент (момент торможения), который возникает при уменьшении задания скорости.
n1 и n2— скорости вращения на частотах f1 и f2.
Если преобразователь частоты допускает кратковременный перегрузочный момент, то моменты разгона и торможения устанавливаются равными номинальному крутящему моменту электродвигателя Т. На практике время разгона и время торможения обычно одинаковы.
Пример расчета
J = 0,042 кгм2, Tfric = 0,05 x MN , n1 = 500 об/мин, n2 = 1000 об/мин, ТN = 27 Нм
tacc = J х (n2 – n1)/ [(Тасс
Динамическое торможение
Когда сигнал задания скорости снижается, электродвигатель ведет себя как генератор и тормозит. Замедление при торможении зависит от величины нагрузки электродвигателя.
Электродвигатели, подключенные непосредственно к сети, отдают мощность торможения обратно в сеть.
Если электродвигатель работает от преобразователя частоты, энергия торможения сохраняется в промежуточной цепи преобразователя частоты. Если мощность, выделяемая при торможении, велика и преобразователь частоты не может рассеять ее за счет собственной конструкции, напряжение промежуточной цепи возрастает.
Напряжение промежуточной цепи может расти до тех пор, пока преобразователь частоты не будет отключен средствами защиты, и иногда к промежуточной цепи приходится подключать нагрузку в виде тормозного модуля и внешнего резистора для поглощения мощности торможения.?
Использование тормозного модуля и тормозного резистора позволяет осуществлять быстрое торможение при больших нагрузках. Однако, при этом возникают проблемы, связанные с нагревом. Другим решением является использование блока рекуперативного торможения. Такие блоки применяются для преобразователей частоты с неуправляемым выпрямителем и возвращают энергию торможения в питающую сеть.
В преобразователях частоты с управляемыми выпрямителями мощность торможения может возвращаться в сеть (см. рис. 13) с помощью, например, инвертора, подключенного к выпрямителю встречно-параллельно.
Рис. 13. Включение тормозного модуля и тормозного резистора
Рис. 14. Инвертор, включенный встречно-параллельно
Другой способ торможения электродвигателя — торможение постоянным током. Для создания магнитного поля в статоре используется напряжение постоянного тока, подаваемое между двумя фазами электродвигателя. Поскольку энергия торможения остается в электродвигателе и возможен перегрев, торможение постоянным током рекомендуется использовать в диапазоне низких скоростей, чтобы не превышать номинальный ток электродвигателя. Обычно торможение постоянным током ограничивается во времени.?
Реверс
Направление вращения асинхронных электродвигателей определяется порядком следования фаз питающего напряжения.
Если поменять местами две фазы, направление вращения электродвигателя изменится, и он будет вращаться в противоположном направлении.
Большинство электродвигателей сконструировано таким образом, чтобы заставить вал двигателя вращаться по часовой стрелке, если соединение выполнено следующим образом:
Рис. 15. Направление вращения электродвигателя изменяется путем изменения порядка следования фаз
Этому же правилу отвечает и порядок следования фаз на выходных клеммах большинства преобразователей частоты.
Преобразователь частоты может осуществлять реверс электродвигателя путем изменения порядка следования фаз с помощью электроники. Реверс производится либо путем задания отрицательной скорости, либо цифровым входным сигналом. Если при первоначальном вводе в эксплуатацию требуется, чтобы электродвигатель имел определенное направление вращения, необходимо знать заводскую настройку преобразователя частоты по умолчанию.
Поскольку преобразователь частоты ограничивает ток электродвигателя номинальным значением, двигатель, управляемый преобразователем частоты, можно реверсировать чаще, чем двигатель, подключенный непосредственно к сети.
Рис. 16. Тормозной момент преобразователя частоты во время реверса
Рампы
Все преобразователи частоты имеют функции изменения скорости (рампы) для обеспечения плавной работы. Эти рампы можно изменять, и благодаря им задание скорости можно увеличивать или уменьшать в определенном интервале.
Рис. 17. Регулируемое время разгона и торможения
Угол наклона характеристики разгона/торможения (длительность разгона/торможения) можно установить таким малым, что в некоторых ситуациях электродвигатель не сможет отработать задание (не сможет разогнать/затормозить двигатель за заданное время).
Это приводит к увеличению тока электродвигателя до тех пор, пока не будет достигнут предел по току. В случае малого времени замедления (t-а) напряжение промежуточной цепи способно возрасти до такого уровня, что схема защиты преобразователя частоты остановит преобразователь.
Оптимальное время изменения скорости можно вычислить по приведенным ниже формулам.
ta = J x n/[(TN-Tfric)x9,55]
t-a = J x n/[(TN+Tfric)x9,55]
ta — время увеличения скорости
t-a— время уменьшения скорости
n — число оборотов
TN — номинальный крутящий момент электродвигателя
Tfric — момент трения
Рис. 18. Установка времени изменения скорости
Время разгона/торможения обычно выбирается исходя из номинальной скорости электродвигателя.
Текущий контроль
Преобразователи частоты могут контролировать регулируемый процесс и вмешиваться в него при неисправности.
Такой контроль может быть разделен на три вида в зависимости от объекта: контроль технологической установки, контроль электродвигателя и контроль преобразователя частоты.
Контроль установки основан на контроле выходной частоты, выходного тока и крутящего момента электродвигателя. На основании этих параметров можно устанавливать несколько пределов, превышение которых воздействует на функцию управления. Этими пределами могут быть допустимая наименьшая скорость электродвигателя (минимальная частота), допустимый наибольший ток (предел по току) или допустимый наибольший крутящий момент электродвигателя (предельный крутящий момент).
Преобразователь частоты может быть запрограммирован, например, на подачу предупреждающего сигнала, уменьшение скорости электродвигателя или останов последнего в случае выхода его скорости за установленные пределы.
Пример
В установках, использующих для соединения электродвигателя с остальной частью системы клиновой ремень, преобразователь частоты может программироваться на контроль состояния этого ремня.
Поскольку в случае разрыва ремня выходная частота будет увеличиваться быстрее, чем определяется заданной рампой, в таких ситуациях можно использовать эту частоту для подачи предупреждения или останова электродвигателя.
Контроль электродвигателя можно производить с помощью преобразователя частоты путем мониторинга тепловой модели электродвигателя или путем подключения к электродвигателю термистора. Преобразователь частоты может предотвращать перегрузку электродвигателя, действуя подобно термореле. В вычислениях, производимых преобразователем частоты, участвует и выходная частота. Это гарантирует, что электродвигатель не будет перегружаться на малых скоростях из-за ухудшения внутренней вентиляции. Современные преобразователи частоты также способны защищать электродвигатели с принудительной вентиляцией, если ток становится слишком большим.
Контроль преобразователя частоты традиционно производится таким образом, что в случае перегрузки по току преобразователь отключается. Некоторые преобразователи допускают кратковременную перегрузку по току. Микропроцессор в преобразователе частоты способен одновременно учитывать значение тока электродвигателя и время его приложения, что обеспечивает возможность оптимального использования преобразователя частоты без перегрузки.
По материалам Danfoss
www.eti.su
Выбор частотного преобразователя
Частотный преобразователь (регулируемый электропривод) обеспечивает две его основные и взаимосвязанные функции: управление технологическим процессом рабочей установки в соответствии с предъявляемыми к нему требованиями и электромеханическое преобразование энергии с максимальной ее эффективностью. Реализация этих функций требует особого подхода к выбору и эксплуатации регулируемого электропривода по сравнению с нерегулируемым. Теоретические аспекты такого подхода хорошо известны специалистам в области автоматизированного электропривода (АЭП), Однако, за последние годы произошло заметное сокращение числа специализированных проектных организаций и отток из них наиболее квалифицированных специалистов в области электропривода. Исчезла согласованность проектных и наладочных организаций, их разобщенность стала приводить к повторным ошибкам, а опыт ввода в эксплуатацию электроприводов стал практически (по конъюнктурным соображениям) ограничен для других специалистов.
Обоснование мощности н типа электрических двигателей и частотных преобразователей.
Регулирование технологических координат с высокой статической и динамической точностью требует от электропривода дополнительного запаса по его динамической мощности. Последняя должна выбираться с учетом его реальных нагрузочных диаграмм, включая и динамические составляющие моментов, связанные с изменением приведенного к валу электродвигателя момента инерции. При модернизации электропривода, связанной с заменой одного типа привода на другой, следует учитывать и разницу в перегрузочных способностях по току, моменту и моментах инерции заменяемых электродвигателей. Наиболее актуальны эти замечания для приводов, работающих в повторно-кратковременных режимах работы и на валу которых по технологии рабочей установки имеют место скачкообразные изменения нагрузок.
Распространенной ошибкой является выбор мощности частотного преобразователя питающего электродвигатель по реальной эксплуатационной мощности этого же двигателя в разомкнутой системе управления. При этом из-за ограничения максимально допустимого тока преобразователя возникает проблема обеспечения требуемых динамических показателей привода при введении обратных связей по регулируемым координатам.
Выбор частотных преобразователей на технологическую мощность привода, заметно меньшую номинальной установленной мощности электродвигателя, усугубляет и проблему автоматической идентификации значений его параметров и параметров регуляторов системы управления электроприводом с помощью встроенного в преобразователи их программного обеспечения. При несовпадении предварительно установленных граничных значений параметров двигателя близкого по мощности преобразователю его программное обеспечение либо указывает на невозможность идентификации параметров электродвигателя и блокирует работу преобразователя совместно с двигателем, либо вносит заметные погрешности в свою математическую модель двигателя, на основе которой вычисляются режимы работы и ограничения переменных электропривода. В итоге динамические показатели и эксплуатационная надежность электропривода снижаются.
При выборе частотных преобразователей, работающих в регулируемом электроприводе с высоко динамичными и повторно-кратковременными режимами, не редко игнорируется необходимость обеспечения рекуперации энергии со стороны электродвигателя в питающую сеть, либо на активную нагрузку. Такие преобразователи должны иметь либо двухсторонний обмен энергией между двигателем и питающей преобразователь сетью (ПЧ с непосредственной связью, на основе автономных инверторов тока, с блоком рекуперации на входе инвертора), либо иметь дополнительный резистор для сброса на него рекуперируемой энергии. Создание многодвигательного привода с единой шиной постоянного тока для питания инверторов ПЧ и установкой общего инвертора постоянного тока на неполную суммарную мощность привода способствует решению подобной проблемы. Понятно, что стоимость таких преобразователей возрастает, но технология работы установок и особенно требования их экстренного останова при аварийных режимах или опасности жизнедеятельности обслуживающего персонала вынуждает идти на дополнительные затраты.
Регулирование скорости привода переменного тока отражается и на ухудшении условий охлаждения электродвигателей с самовентиляцией при уменьшении их скорости. Российская электротехническая промышленность, к сожалению, отстает от производства специальных машин переменного тока при их питании от управляемых ПЧ. В итоге это заставляет либо увеличивать установленную мощность двигателей, либо решать в экстренных ситуациях проблему их дополнительного охлаждения.
Одна из особенностей питающих сетей крупных металлургических комбинатов России связана с тем, что их номинальное напряжение достигает 10 кВ. Это создает заметные трудности при замене нерегулируемого электропривода переменного тока на регулируемый, поскольку в отечественной промышленности отсутствует выпуск ПЧ с выходным напряжением до 10 кВ. Актуальность их создания весьма велика.
Для мощных технологических установок, где окружающая среда отличается повышенной влажностью или наличием токопроводящих Частиц, наметилась тенденция заказа со стороны эксплуатационного персонала низковольтного исполнения электропривода. Подобное решение способствует заметному снижению эксплуатационных затрат на его обслуживание при увеличении надежности и безопасности электрооборудования.
Согласование преобразователей частоты с питающей их сетью и электродвигателем.
Возможность резких колебаний и искажений напряжения и тока питающей преобразователи сети из-за коммутационных режимов (включении и отключении питающего преобразователь трансформатора, коммутации вентилей и т.п.) заставляет принимать специальные защитные меры по ограничению их влияния на работу преобразователя и системы его управления. К числу подобных мер относятся установка на входе преобразователя силовых токоограничивающих реакторов, защитных RC-цепей или варисторов. Актуальность обоснования и выбора их параметров сохраняется и до сих пор.
Особенно это проявляется при замене отечественных преобразователей на преобразователи иностранных фирм, когда сохраняются питающая сеть со всеми реальными для нее отклонениями напряжения и основные силовые элементы отечественного производства (трансформаторы, коммутационная аппаратура, электродвигатели) с параметрами (индуктивностью,
prom-electric.ru
выбор и расчёт, управление, сборка своими руками
Одним из главных недостатков асинхронных двигателей является сложность регулировки частоты вращения. Изменять её можно тремя способами: изменением количества пар полюсов, изменением скольжения и изменением частоты. В последнее время для регулирования скорости вращения асинхронного короткозамкнутого двигателя частоту тока меняют с помощью частотных преобразователей для электродвигателя.
Понятие о принципе работы частотника
В последнее время на производстве стали широко использоваться высокочастотники, у многих неопытных новичков, встречающих их на практике, часто возникает вопрос, что такое частотный преобразователь и для чего он нужен. Достоинствами частотного привода для электродвигателя являются:
- снижение электропотребления двигателем;
- улучшение показателей работы: плавность запуска и регулировки скорости вращения;
- исключение возможных перегрузок.
Плавность пуска обеспечивается преобразователем благодаря снижению с его помощью пускового тока, который без частотника превышает номинальный ток в 5–7 раз.
Основными частями в устройстве преобразователя являются инвертор и конденсаторы. Инвертор обычно выполнен из диодных мостов. Его задача — выпрямить напряжение на входе, которое может принимать значение 220В или 380В в зависимости от количества фаз, но сохранить при этом пульсации. Затем конденсаторы выпрямленное напряжение сглаживают и фильтруют.
Потом постоянный ток отправляется на микросхемы и выходные мостовые IGBT-ключи. Обычно мостовой IGBT-ключ — это шесть транзисторов, соединённых по мостовой схеме. Защиту от пробоя напряжения обратной полярности осуществляют диоды. В более ранних схемах вместо транзисторов были использованы тиристоры, значительными недостатками которых были некоторая замедленность в работе и помехи.
Благодаря этим устройствам возникает широтно-импульсная последовательность с необходимой частотой. На выходе частотника импульсы напряжения имеют прямоугольный вид. А после того как они проходят через обмотку статора, вследствие её индуктивности, принимают синусоидальный вид.
Чтобы понять, зачем нужен инвертор, необходимо уяснить, что ток бывает постоянным и переменным. И если преобразователи частоты используются при работе с переменным током, то для управления электромотором постоянного тока необходим электропривод постоянного тока. Он называется инвертором и его назначением в схеме является контроль тока возбуждения. И он также независимо от изменений нагрузки может поддерживать скорость вращения ротора в требуемых пределах и осуществлять его торможение.
Советы по выбору частотников
При выборе частотника наиболее низкая стоимость определена набором минимальных функций. Рост стоимости пропорционален их увеличению.
Первоначально преобразователи классифицируют по мощности. Не менее важными параметрами являются перегрузочная способность и тип исполнения.
Мощность частотника должна быть не меньше максимальной мощности установки. Для оперативного ремонта или замены в случае поломки частотного привода для электромотора желательно, чтобы сервис-центр был расположен в непосредственной близости.
При выборе преобразователя немаловажным фактором является его напряжение. Если подобрать частотник определённого напряжения, а в сети оно окажется более низким, то он будет отключаться. Если же напряжение сети будет длительно допускать допустимое напряжение, то это приведёт к его повреждению и невозможной дальнейшей работе. С учётом этих рисков нужно выбирать частотники с большим интервалом допустимого напряжения.
Существует два типа управления преобразователей: векторное и скалярное.
При скалярном управлении удерживается постоянство между значением напряжения и частоты на выходе. Это наиболее простой тип частотников, и, вследствие этого, более дешёвый.
При векторном управлении из-за снижения статической ошибки управление осуществляется более точно. Но и стоимость асинхронного преобразователя частоты с этим видом управления более высока в сравнении со скалярным управлением.
Зона регулирования частоты тока должна быть в необходимых пределах. Для диапазонов с регулировкой по частоте более, нежели в 10 раз лучше выбрать векторное управление.
Количество вводов должно быть оптимальным, потому как при слишком большой их численности цена прибора для изменения частоты будет неоправданно завышена, а также могут возникнуть некоторые сложности при его настройке.
Необходимо учесть перегрузочные способности частотника по току и мощности. Ток частотника должен быть чуть больше, нежели номинальный ток двигателя. В случае возникновения ударных нагрузок необходим запас по пиковому току, который должен быть не менее 10% от ударного тока.
Расчёт частотника для электродвигателя
Для того чтобы преобразователь частоты имел возможность работать надёжно и соблюдать заданные значения, необходимо рассчитать его основные параметры:
- тип исполнения;
- ток;
- мощность.
Расчёт тока преобразователя производится по формуле:
где Р – номинальная мощность двигателя, квт;
U – напряжение, В
сosφ – значение коэффициента мощности
Правильный выбор мощности прибора для изменения частоты сказывается на эффективности работы установки. При заниженной мощности частотного преобразователя производительность оборудования будет невысокой. Длительные перегрузки при работе могут привести к поломке преобразователя частоты.
При завышенной мощности частотного преобразователя и скачках напряжения или перегрузке не сработает защита электродвигателя, что приведёт к его повреждению. U
Мощность частотника должна быть больше номинальной мощности соответствующего двигателя на 15%.
Необходимые материалы для самодельного частотника
Изготовить частотник своими руками практически возможно. Для этого нужно определиться с основными деталями, приобрести их, изучить схему сборки. Затем приступить к процессу изготовления.
В начале работы необходимо запастись двумя платами. На одной из плат необходимо установить микроконтроллер и индикатор. На второй — транзисторы, диодный мост, входные клеммы, блок питания и драйвер. Между собой платы необходимо соединять гибким проводом.
Питания будет производиться с помощью импульсного блока.
Для управления маломощным мотором достаточно будет установки токового шунта и подключённого к нему усилителя DA-1. Сечение жил токового шунта составляет полмиллиметра. Для двигателей с более высокой мощностью установки токового шунта недостаточно и поэтому необходимо устанавливать трансформатор.
При мощности двигателей более 0,4 КВт необходима установка термодатчиков.
Микросхема IL300 с линейной развязкой позволяет контролировать параметры электродвигателя.
Оптроны типа ОС2–4 необходимы для дубляжа управляющих кнопок.
В результате эксплуатации вследствие большой протяжённости проводов могут возникать помехи. Устранить их можно с помощью специальных колец для удаления помех.
Подключение и настройка
При подключении асинхронного преобразователя частоты в сеть однофазного тока клеммы двигателя необходимо соединить в «треугольник». Эта схема соединения подразумевает присоединение конца и начала соседних обмоток. Напряжение питания при этом будет 220 В. Выходной ток необходимо удерживать в пределах не более половины его номинального значения.
Если частотник подключается к трехфазной сети, то клеммы двигателя соединяются в «звезду». При этой схеме соединения концы трёх фаз обмоток соединяются в одну точку. Напряжение от сети принимает значение 380В.
Очерёдность подключения общей электрической цепи будет следующей:
- дифференциальный автоматический выключатель, ток которого совпадает с номинальным током двигателя;
- преобразователь частоты;
- электродвигатель.
При работе с трехфазной сетью автоматический выключатель должен быть снабжён общим рычагом по всем трём фазам. В таком случае перегрузка одной из фаз будет устранена выключением всего питания. Допустимый ток срабатывания должен быть рассчитан на основе значения тока двигателя в одной фазе.
При установке преобразователя в однофазную сеть допустимый ток автоматического выключателя должен превышать в три раза значение фазного тока.
Подключается преобразователь к электромотору с помощью магнитного пускателя. Выбирается магнитный пускатель по напряжению сети и номинальному току.
Перед монтажом пульта управления его рычаг должен быть в положении «Выключено». При включении рычага обязательным условием есть появление сигнала на световом индикаторе. Клавишей RUN производится запуск частотника. А рукоятка пульта управления контролирует изменение числа оборотов ротора двигателя.
Следует с особым вниманием изучить значение частоты на частотнике, так как на одних моделях указывается частота вращения ротора электродвигателя, а на других приведена частота тока преобразователя.
Настройка частотного преобразователя для электродвигателя начинается с внимательного изучения инструкции, так как в ней указана последовательность этих операций.
Для того чтобы настроить частотный преобразователь для электродвигателя, необходимо произвести правильный выбор типа проводов и верный размер их сечения.
Перед настройкой частотника необходимо правильно обнаружить и подключить входные и выходные клеммы. Входные клеммы маркируются буквой L с указанием нумерации фазы. Выходные клеммы обозначены латинскими буквами — U, V, W.
Так как параметров у преобразователя заводского исполнения довольно-таки много, частично его настройка производится на заводе. Остальные параметры настраиваются вручную. Основные этапы настройки частотного преобразователя:
- подача питания на частотный преобразователь;
- выбор определённого режима работы;
- установка значений рабочих характеристик оборудования.
Эксплуатация частотника
Правильный порядок эксплуатации преобразователя частоты заключается в выполнении основных операций:
- Систематическая очистка частотного привода для электродвигателя от пыли и грязи.
- Регулярно менять детали, срок годности которых истекает.
- Постоянный контроль напряжения и температуры.
- Работа устройства должна проходить при заданных условиях: не превышать допустимый уровень пыли, влажности, температуры окружающей среды.
Нежелательным является попадание прямых солнечных лучей на частотник, отсутствие достаточной вентиляции. Материалы и жидкости, которые достаточно легко воспламеняются, не должны находиться рядом с ним. В помещении регулярно должна проводиться обработка против грызунов. Место установки частотного привода для электродвигателя не должно иметь шероховатостей, позволять вибрации.
Частотники для двигателя мощностью около 3 КВт являются наиболее распространёнными ввиду компактности, относительно невысокой цены, простоты установки и обслуживания
Собирать вручную частотники для двигателей мощностью 3 КВт и больше нет смысла — они будут довольно дорогими по цене и не всегда обеспечивать необходимую точность в работе.
Для двигателей мощностью 3 КВт преобразователи частоты находят применение:
- в системах вентиляции для контроля скорости вращения вентилятора;
- для одновременности работы принимающего и подающего конвейеров;
- для подачи сырья с контролем его объёма;
- для управления несколькими насосами;
- для контроля работы погружным насосом;
- для регулировки скорости подачи сырья в дробилках.
Частотники для двигателей большей мощности отличаются величиной максимальной выходной частоты, наличием фильтра электромагнитной совместимости (ЕМС), видом режима управления.
Например, у частотного привода для электродвигателя мощностью 15 КВт максимальная выходная частота меньше, нежели у преобразователя для двигателя мощностью 3 КВт. ЕМС фильтр для такого двигателя не предусмотрен. Режим управления только скалярный.
Оцените статью: Поделитесь с друзьями!chebo.biz
Выбор частотных преобразователей, диапазон регулирования частоты
Нюансы выбора частотного преобразователя:
- В том случае, если при выборе пользователь ошибся с мощностью, и она оказалась завышена, преобразователь не сможет защитить двигатель от возможного перегруза, скачков напряжения и прочих факторов.
- Меньшая мощность не создаст условия для хорошей эффективности машины. Преобразователь с небольшой мощностью не сможет обеспечить высокую динамику рабочего режима насосной установки. Возникающие периодически перегрузки могут послужить причиной неисправности.
Факторы, на которые обращают внимание при выборе
Условия эксплуатации устройства являются существенным фактором, влияющим на сроки эксплуатации электродвигателя. Поэтому, выбирая преобразователь частоты, нужно обратить внимание на такие факторы:
- границы рабочих скоростей электрического двигателя;
- рабочие границы моментов вращения;
- характер нагрузки;
- циклограмму работы.
Все характеристики взаимосвязаны между собой. Так, нагрузка имеет несколько типов и связана с такими характеристиками, как скорость, момент и пусковой момент. Она бывает:
- функциональной или служит для подъема грузов, например, мостовой кран, электродвигатель может быть подключен от ПЧ;
- вязкая нагрузка;
- нагрузка с высокой силой инерции;
- нагрузка с передачей и накоплением энергии.
Скорости вращения и момента связаны со скоростью, моментом и параметрами времени, они зависят от следующих характеристик:
- величина постоянного момента;
- постоянная величина скорости;
- уменьшающееся число крутящего момента;
- уменьшающаяся скорость.
Характер нагрузки зависит от таких показателей, как:
- ударная нагрузка;
- постоянная нагрузка;
- изменяющаяся периодами нагрузка;
- высокий начальный момент;
- низкий начальный момент.
Особенности при расчете ПЧ для электродвигателя
Прежде, чем выбрать преобразователь частоты выполняют выбор и расчет преобразователя частоты для электродвигателя. Обязательно обращают внимание на продолжительность скоростных режимов, в том числе и на повторно-кратковременный режим. Необходимо принимать во внимание мгновенную величину максимального тока и на длительность постоянного тока на выходе с преобразователя.
Важно учитывать максимальную и номинальную частоту. Принимается во внимание мощность или импендас силового распределительного трансформатора вместе с проводами линии электропередач или кабельной линией. Источник питания влияет на работу частотника и насосной установки, длина питающей линии оказывает влияние на потери напряжения. Учитываются возможные скачки напряжения, возможный перекос фаз при неравномерной нагрузке, влияющий на фазный дисбаланс.
Учитываются такие факторы, как механическое трение, потери в проводнике и изменение рабочего цикла.
Выбор частотных преобразователей на насосы
Важно произвести правильный расчет преобразователя частоты и совмещение его с насосной установкой. Расчет будет влиять на правильный выбор преобразователя. От этого зависит его эффективность и долговечность использования, как самого преобразователя, так и электропривода (насосной установки) полностью.
Как выбрать ПЧ перед тем, как его купить
Перед тем, как выбрать частотный преобразователь,проверяют электрическую совместимость с двигателем и нагрузочной способностью (мощностью).
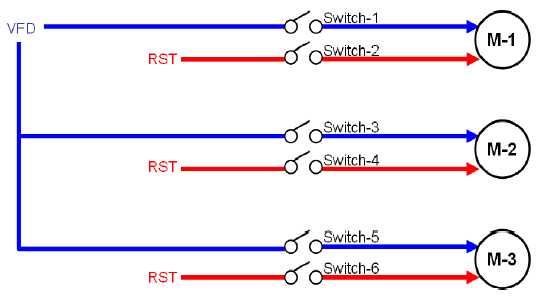
Рис. №1. Структурная схема работы системы насосных агрегатов от преобразователя частоты VFD.
При работе преобразователя частоты с одним двигателем выбор проводят в зависимости от паспортных характеристик. При выборе учитываются такие показатели, как:
- Мощности по паспорту ПЧ и электродвигателя должны быть равными. Этот параметр действует в случае использования двигателей с двумя парами полюсов (2p=4), со скоростью вращения до 1500 об/мин, с постоянным моментом. Он же действует и для ПЧ, которые могут справиться с перегрузом в 150% (конвейеры, транспортерные ленты) и для преобразователей, работающих с перегрузом 120% (вентиляторы, центробежные насосы).
- Величина номинального тока должна быть равной и быть больше продолжительного фактического тока, который потребляется двигателем (тока нагрузки).
Важно: потребляемый двигателем ток должен быть меньше номинального тока преобразователя частоты, приведенного в спецификации.
Время разгона двигателя при пусковом токе 150% составляет 120% для преобразователей, специализирующихся в насосных агрегатах, от номинального ПЧ обычно не должно превышать 60сек.
- Входное напряжение сети должно удовлетворять преобразователь, он должен сохранять свою работоспособность при любых отклонениях напряжения от нормы.
- Диапазон регулирования частот, который может поддерживать преобразователь должен удовлетворять высокоскоростному режиму двигателя.
- Наличие дискретных входов управления необходимо для ввода различного рода команд, запрограммированных пользователем. Нужны и аналоговые, служат для ввода сигналов задания и для обратной связи. Необходимы и цифровые входы, служащие для высокочастотных сигналов, поступающих от энкордеров или цифровых датчиков скорости и положения.
- Число выходных сигналов служат для создания сложных схем для системы насосных станций.
- Возможность оперативного управления в рабочем режиме, это могут быть входы управления с помощью пульта. Или управление с помощью шины последовательной связи посредством контроллера или компьютера. Может быть это будет комбинированное управление.
- Выбор преобразователя зависит от предпочтения способа управления электродвигателем, скалярное или векторное управление. Зависит раздельного векторного управления двигателями или скалярное управление – поддержание одного постоянного отношения выходного напряжения к выходной частоте. Для насосных агрегатов более свойственен способ векторного управления.
- К более точным критериям выбора частотника принадлежит параметр, определяющий работу двигателя на установившейся скорости. При работе преобразователя с одним двигателем необходимая мощность для запуска рассчитывается по формуле:
Рис. №2. Формула расчета полной пусковой мощности.
Ток потребления двигателем от преобразователя при сетевом напряжении 220/380В рассчитывают по формуле:
Рис. №3. Расчет механических характеристик двигателя.
Важно: Руководствуясь требованием, как правильно выбрать преобразователь частоты по токовым характеристикам, требуется соответствие ПЧ всем нормам и требованиям, но нормами по мощности разрешается пренебречь.
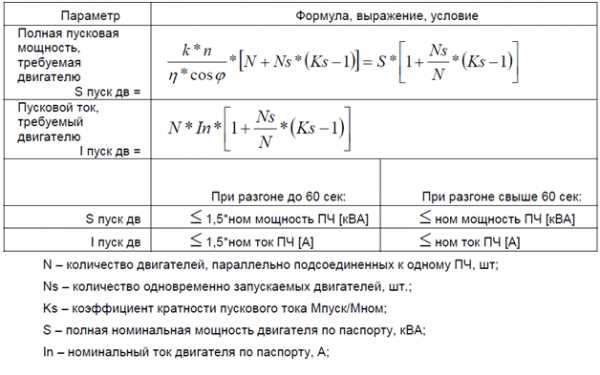
Рис. №4. Таблица неравенств, которые необходимо соблюдать при выборе ПЧ для работы одного частотника с несколькими двигателями.
Преимущества применения частотного преобразователя

Рис.№5. Преимущества выбора частотного преобразователя
К достоинствам частотного преобразователя относятся несколько важных качеств:
- Снижение пускового тока до фактической рабочей величины. Условия питания электрического двигателя напрямую от сети и питание от преобразователя отличаются. В первом случае, пусковой ток увеличивается не менее, чем в семь раз от номинального значения тока двигателя. Плавный пуск с постепенным плавным нарастанием частоты сетевого напряжения питания двигателя может быть понижен до фактического, потребляемого двигателем в установившемся рабочем режиме. Достигается это установкой времени разгона, если необходимо разогнать инерционную нагрузку преобразователь может обеспечить большую мощность, чем мощность двигателя.
- Существуют модели преобразователей, максимально ориентированных для работы на нагрузку с переменным моментом, а именно, для насосных станций, укомплектованных центробежными насосами. Номинальный ток преобразователя может быть более, чем на две ступени выше паспортных показателей двигателя.
- Использование частотного преобразователя для запуска насосных агрегатов дает экономию электроэнергии минимум 30%.
Недостатки векторных частотных преобразователей:
- Сложность настройки векторного преобразователя, необходима консультация специалиста. Производится учет параметров электродвигателя, в том числе и индуктивности.
- Технология использования электропривода должна подразумевать 100% точность, только в этом случае оправдан выбор ПЧ.
- Выбирая векторный преобразователь, нужно не забыть перейти со скалярного режима.
- Высокие требования к точности измерительных приборов и датчиков тока, что сказывается на стоимости.
- Векторный ПЧ желательно использовать для конкретного электродвигателя.
chistotnik.ru
Выбор преобразователя частоты для электродвигателя. Основные моменты
Критерии выбора
Мощность
Питающее напряжение
Диапазон регулирования
Режим торможения
Способы управления электродвигателем
Правильный выбор преобразователя частоты позволит сократить текущие производственные расходы и, одновременно, повысить производительность технологического оборудования.
Преимущества использования частотных преобразователей
- экономичное потребление энергоресурсов;
- минимальные затраты на техническое обслуживание при соблюдении требований, установленных производителем;
- повышение качества оперативного управления действующими мощностями;
- постоянный контроль за важными технологическими процессами;
- увеличение эксплуатационного ресурса электроприводов и другой сложной техники, в среднем, на 35%.
Критерии выбора
К сожалению, четкого перечня критериев, позволяющих выбрать преобразователь частоты, не существует. Это объясняется спецификой разных типов промышленного оборудования. Для каждой единицы техники, эксплуатируемой на заводах, фабриках, предприятиях малого бизнеса, действуют свои условия и ограничения. Поэтому выбор технических параметров преобразователя частоты в каждом случае индивидуален.
Ключевой критерий – тип исполнительного механизма. Сориентироваться в остальных параметрах помогут универсальные рекомендации, приведенные ниже.
Мощность
Важнейшим параметром электропривода является его мощность. Именно поэтому перед тем, как выбрать частотный преобразователь для электродвигателя, следует определиться с нагрузочной способностью оборудования. Мощностные показатели ПЧ должны соответствовать значению номинальной мощности двигателя. При этом нагрузка на валу не должна подвергаться динамическим изменениям. Другими словами, частотник подбирается, исходя из следующих параметров:
- максимального значения тока, потребляемого электроприводом от частотника;
- перегрузочной способности преобразователя;
- планируемого типа нагрузки;
- уровня, длительности и частоты появления перегрузок.
Питающее напряжение
Не менее важным является и такой показатель, как питающее напряжение. Как правило, оборудование запитывается от трехфазной промышленной электросети напряжением 380 В. Также встречаются приводы, адаптированные для работы от однофазной сети 220/240 В.
Кроме того, на данный момент в каталогах производителей имеются модернизированные серии приводов, предназначенные для эксплуатации в высоковольтных сетях. Мощность такого оборудования измеряется в мегаваттах.
Диапазон регулирования
В случае, когда показатели скорости вращения электродвигателя не опускаются ниже 10% от номинала, подбор преобразователя частоты не предусматривает соблюдения каких-либо специальных условий. Однако в ситуации, требующей дальнейшего снижения скорости при соблюдении номинального крутящего момента на валу, важно убедиться в том, что ПЧ сможет обеспечить работу на частотах, приближенных к нулю.
Режим торможения
Инерционное торможение по своим характеристикам схоже с отключением электродвигателя от питающей сети. Оба процесса могут занять немало времени, но, правильно подобрав преобразователь частоты и опции к нему, можно выполнить останов или торможение двигателя с переходом на более низкую скорость за короткий промежуток времени.
Способы управления электродвигателем
Ряд механизмов предусматривают эксплуатацию с управлением от задающего сигнала при условии плавного изменения оборотов электрического двигателя. Иногда необходима работа на фиксированных скоростях. Оба этих момента предусматривают управление как с пульта управления преобразователя частоты, так и с применением клемм цепей управления ПЧ, кнопок, потенциометров, переключателей, устройств автоматики.
Все вышеперечисленные аспекты выбора частотника не являются исчерпывающими. При подборе также важно учитывать наличие функции индикации параметров, полноту защитных функций, особенности монтажа и установки ПЧ, возможность автоматической настройки, условия использования устройства, наличие различных интерфейсов связи.
Другие полезные материалы:
Как правильно подобрать электродвигатель
Редуктор от «А» до «Я»
Как выбрать мотор-редуктор
Подключение и настройка частотного преобразователя
tehprivod.su
Как выбрать частотный преобразователь для электродвигателя
Экология познания.Наука и техника: Асинхронные двигатели применяются сегодня достаточно широко, а современные частотные преобразователи призваны сделать их работу более эффективной, устойчивой и безопасной.
Асинхронные двигатели применяются сегодня достаточно широко, а современные частотные преобразователи призваны сделать их работу более эффективной, устойчивой и безопасной. В каждом конкретном случае режим работы асинхронного двигателя свой, и особенности этих режимов отличаются, в связи с этим полезно оптимизировать параметры питания двигателей, чему и способствует применение частотных преобразователей.
При выборе частотного преобразователя для конкретной цели, необходимо учесть ряд рабочих параметров: мощность электродвигателя, его тип, диапазон регулировки скорости и точность этой регулировки, точность поддержания момента на валу. Это первостепенные параметры для выбора. Дополнительно стоит обратить внимание на габариты и форму устройства, а также на расположение элементов управления, будет ли оно удобным в вашей ситуации.
Частотные преобразователи бывают однофазными или трехфазными. И даже если на вход подается всего одна фаза, на выходе может быть как одна, так и три фазы. Обязательно обратите на это внимание при выборе частотного преобразователя.

Что касается мощности асинхронного двигателя, то она связана с максимальным потребляемым током, на который и следует ориентироваться. Если при старте двигателя требуется получить значительный пусковой момент на валу, то в этом случае и ток нужен больший, значит, имеет смысл выбрать частотный преобразователь на большее значение тока. Быстрый разгон и резкое торможение напрямую связано с током, если преобразователь в состоянии дать необходимый ток, значит, по этому параметру он вам подходит.
Для специальных двигателей, как то: погружные насосы, синхронные двигатели, с втяжным ротором, высокоскоростные, — максимальный ток частотного преобразователь должен быть лишь немного выше номинального тока двигателя.
Когда параметры нагрузки заранее известны и не меняются при постоянной частоте (например это могут быть вентиляторы, насосы, компрессоры, то есть те механизмы, которые отвечают за поддержание определенного состояния технологического процесса), то есть момент зависит непосредственно от частоты, применяют скалярный метод частотного регулирования с диапазоном от 5 до 50 Гц и выше.
К примеру, компрессор должен поддерживать определенное давление, и датчик давления, отслеживая текущее состояние в текущем режиме, дает сигнал на изменение оборотов, — обороты компрессора меняются, следовательно, меняется и нагрузка, эту возможность дает опция обратной связи.
Для более точного управления, когда требуется поддерживать постоянный момент или скорость даже на низких частотах, применяют частотные преобразователи с векторным регулированием. Они могут поддерживать скорость постоянной даже при резко меняющейся нагрузке, и это уже более сложное управление.

В основном частотные преобразователи с векторным управлением подходят для приведения в действие конвейеров, лифтов, транспортеров, строительной техники, прессов, станков, и другого оборудования, требующего постоянной скорости при переменной нагрузке. Могут такие преобразователи поддерживать и постоянный момент при меняющейся скорости.
Преобразователь с векторным управлением требует настройки, то есть ввода паспортных данных подключенного двигателя. В процессе работы происходит автоматическое регулирование на основе текущей информации о токе, напряжении и частоте. Векторный метод регулирования позволяет снизить реактивный ток двигателя до оптимального путем соответствующего понижения или повышения напряжения на двигателе.
Частотные преобразователи с обратной связью по скорости позволяют прецизионно регулировать скорость, когда нагрузка при одной и той же частоте может меняться, и момент вообще не связан напрямую со скоростью. У таких преобразователей возможна и регулировка скорости в широком диапазоне при моментах близких к номиналу.
К дополнительным опциям частотных преобразователей можно отнести возможность подключения по протоколам MODBUS, PROFIBUS, CANOPEN, а также управление посредством Bluetooth. Встречаются частотные преобразователи с выносным потенциометром, с возможностью управления с компьютера, и с функцией сохранения настроек.опубликовано econet.ru
econet.ru
Расчеты преобразователя частоты для асинхронных двигателей
Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов, управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.
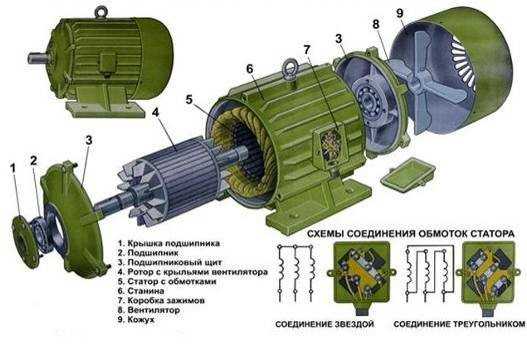
Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».

Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:

- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z1 / y, где 2р – количество полюсов, Z1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:
- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z1 b / h или 2 p = 0,5 Di / h,
где 2р – количество полюсов, Z1 – число пазов, b – размер зуба, см, h – высота спинки, см, Di – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
Регулировка частоты и напряжения с помощью частотного преобразователя, путем создания дополнительной катушки с переключением полюсов пар, являются самыми востребованными способами.
Распространенные схемы регуляторов
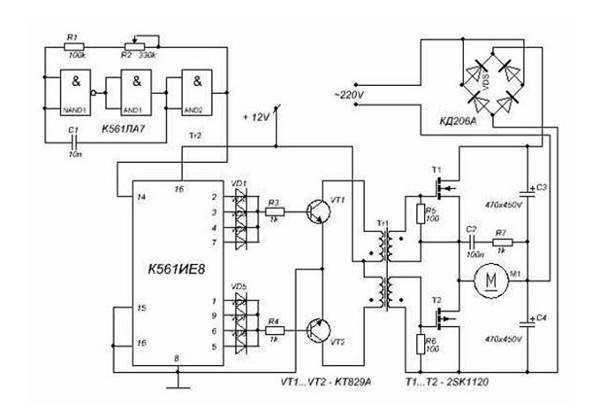
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
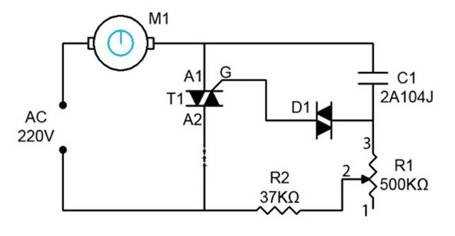
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.
Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.
Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Как выбрать частотный преобразователь?
Если проанализировать цены и функции преобразователей частоты, то можно понять, что по цене определяется количество встроенных функции частотного преобразователя. Дорогие модели обладают большой функциональностью. Но для выбора прибора лучше руководствоваться требуемыми условиями применения.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний по обслуживанию:
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Окупаемость преобразователя частоты
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью сэкономленной энергии. Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Методы запуска двигателей
Можно определить 4 метода пуска двигателей.
- Прямое включение, для моторов до 10 кВт. Способ неэффективен для ускорения, увеличения момента, перегрузок. Токи выше номинала в 7 раз.
- Включение с возможностью выбора схем «треугольника» и «звезды».
- Интегрирование устройства плавного пуска.
- Применение инвертора. Способ особенно эффективен для защиты мотора, ускорения, момента, экономии энергии.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
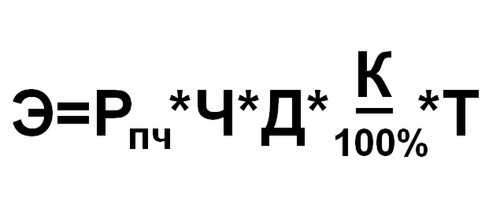
где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя

Watch this video on YouTube
chistotnik.ru
