Принцип работы сервопривода, что такое сервопривод
Сервопривод – это привод, предназначенный для осуществления контроля (угол поворота вала, скорость вращения/движения и так далее) над различными объектами, находящимися в постоянном движении. Контроль производится в зависимости от заданных ему параметров извне.
 Рисунок 1. Сервопривод
Рисунок 1. Сервопривод
Данный механизм получил достаточно широкое применение в различных промышленных сферах. Например, чаще всего его можно увидеть в конструкциях станков/машин для создания таких материалов/предметов и их обработки как:
- Упаковки и бумага;
- Листовой металл;
- Обработка материалов;
- Транспортное оборудование;
- Стройматериалы.
Также они могут использоваться в управляющих элементах механических систем (заслонка/задвижка, багажник автомобиля и тому подобные механизмы). Сервопривод очень полезен, так как позволяет поддерживать необходимый вам параметр.
Устройство
 Рисунок 2. Устройство сервопривода
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
- Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Виды
Сервоприводы могут быть произведены в самых различных комплектациях. Эти устройства разделяют по принципу движения:
Вращательное
Представлено двумя вариациями: синхронной и асинхронной. Синхронный вариант помогает задать высокоточные параметры скорости вращения, углов поворота и ускорения. По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
Асинхронный привод отличается способностью поддержания с большой точностью необходимой скорости даже в условиях низких оборотов.
Линейное
Также делится на два варианта: плоские и круглые. Двигатели данного типа развивают достаточно высокое ускорение (70 метров в секунду).
Ещё их выделяют по способу действия:
- Электромеханические механизмы – формирование движений происходит за счёт электродвигателя с редуктором;
- Электрогидромеханические – у них любое движение создаётся с участием системы поршня-цилиндра. В сравнении с электромеханическим приводом они обладают отличительно высоким быстродействием.
Параметры
Абсолютно любой сервопривод классифицируется по следующим параметрам:
Поворотная скорость представляет собой конкретный временной промежуток, необходимый для изменения позиции вала и зависима от определённого напряжения.
Поворотный угол выходного вала. Обычно этот параметр равен 180, 360.
Крутящий момент является самым важным параметром работы механизма и регулируется в зависимости от напряжения.
Управление сервопривода зависит от его типа – цифровой он или аналоговый.
Питание. Чаще всего в моделях используют напряжение, варьирующееся от 4.8 до 7.2 вольт.
Материал. Для изготовления редуктора могут использовать различные материалы. Для шестерней используют металл, карбон, пластик. Металл отличается большой устойчивостью в условиях динамических нагрузок, но не долговечен. Пластик долговечен, но не устойчив в динамических нагрузках.
Размер. По этому параметру приводы делят на микро-, стандартные и большие (существуют и другие размеры, но эти самые распространенные).
Принцип работы сервопривода
Рисунок 3. Принцип работы сервопривода
Движение редукторного выходного вала, который связан сервоприводом с шестернями, происходит за счёт работы электродвигателя. Для регулирования оборотов предназначен редуктор. Для управления необходимыми механизмами вал соединяется непосредственно с ними.
Его положение контролирует специальный датчик (на них основано всё устройство), который преобразует угол поворота в электро-сигналы. Такой датчик носит название энкодера. Во время поворота бегунка сопротивление энкодера изменяется. Это изменение пропорционально зависимо от угла поворота датчика. Благодаря этому принципу работы механизм можно зафиксировать в нужной позиции.
Для поддержания отрицательной обратной связи используется электронная плата, которая обрабатывает сигналы, приходящие от энкодера. Она сравнивает параметры и определяет запускать или остановить электродвигатель.
Управление
Для того чтобы серводвигатель мог функционировать в нём используют специальную систему, основанную на G-кодах. Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Например, в системе ЧПУ сервопривод контактирует с инверторами, способными изменять напряжение, которое соответствует входному, в обмотке электромотора.
Вся система серводвигателя управляется/контролируется блоком управления, из которого поступают различные команды, например, передвижения по оси Х или У. После подачи команды в инверторе создаётся определённое напряжение, питающее привод. Затем серводвигатель начинает своё круговое движение, связанное с главным исполнительным элементом механизма и энкодером.
Энкодер создаёт множество импульсов, которые подсчитываются блоком, осуществляемыми управление устройством. Для каждой позиции исполнительного элемента в программе установлено определённое количество импульсов. Так под их влиянием либо подаётся напряжение на моторчик, либо прекращается.
Преимущества и недостатки
Приятной особенностью сервоприводов является их достаточно малый размер и вес, что позволяет устанавливать их в различные конструкции с лёгкостью. Также они отличаются своей почти полностью бесшумной работой, что очень важно при использовании данных устройств на определённых участках. Любой сервопривод можно настроить персонально под свои конкретные задачи.
Благодаря сервоприводу можно осуществлять управление с отличительной большой точностью и стабильностью.
Из недостатков выделяется только сложность в их настройке и стоимости.
Подключение
 Рисунок 4. Подключение сервопривода к системе Arduino
Рисунок 4. Подключение сервопривода к системе Arduino
Подключение сервопривода осуществляется за счёт проводников в количестве трёх штук. Два проводника используются для подачи питания на электромотор, а оставшийся необходим для передачи сигналов от блока управления, которые приводят вал в нужную позицию.
Стоит отметить, что для того чтобы снизить вероятность огромных динамических нагрузок, которым может подвергаться электромотор, необходимо осуществлять как плавный разгон мотора, так и его торможение. Для этой цели создаются и используются более высокие по сложности микроконтроллеры, которые обеспечивают высокую точность в контроле и управлении положением рабочей детали.
Шаговый сервопривод
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:
Проголосовавших: 3 чел.
Средний рейтинг: 5 из 5.
principraboty.ru
Сервопривод: виды, управление, принцип работы
Содержание:
- Устройство сервопривода
- Как работает сервопривод
- Управление серводвигателем
- Плюсы и минусы сервомоторов
В конструкциях современного оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
Устройство сервопривода
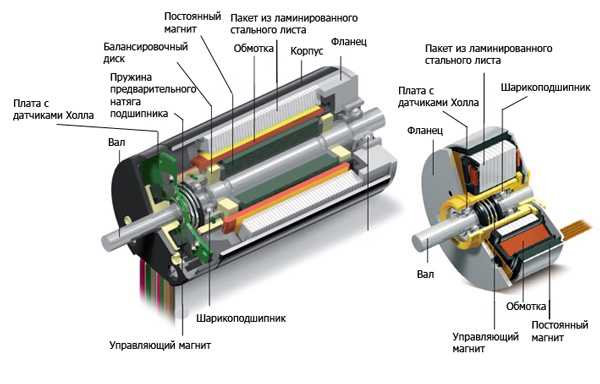
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.

Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.
Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Управление серводвигателем
Основное условие, чтобы серводвигатель мог нормально работать, заключается в их функционировании совместно с так называемой системой G-кодов. Эти коды представляют собой набор команд управления, заложенный в специальную программу.
Если в качестве примера взять ЧПУ – числовое программное управление, то в данном случае сервоприводы будут взаимодействовать с преобразователями. В соответствии с уровнем входного напряжения они способны изменить значение напряжения на возбуждающей обмотке или якоре электродвигателя.

Непосредственное управление серводвигателем и всей системой осуществляется из одного места – блока управления. Когда отсюда поступает команда на прохождение определенного расстояния по оси координат Х, в цифровом аналоговом преобразователе возникает напряжение определенной величины, которое и поступает в качестве питания привода этой координаты. В серводвигателе начинается вращательное движение ходового винта, связанного с энкодером и исполнительным органом основного механизма.
В энкодере вырабатываются импульсы, подсчитываемые блоком, выполняющим управление сервоприводом. В программе заложено соответствие определенного количества сигналов с энкодера, установленному расстоянию, которое должен пройти исполняющий механизм. В нужное время аналоговый преобразователь, получив установленное число импульсов, прекращает выдачу выходного напряжения, в результате, серводвигатель останавливается. Точно так же под влиянием импульсов восстанавливается напряжение, и возобновляется работа всей системы.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Плюсы и минусы сервомоторов
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.
electric-220.ru
Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность. Именно продолжительность импульса определяет угол поворота двигателя.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс. Параллельно с поступлением управляющего импульса активируется работа генератора опорного импульса, который связан с потенциометром. Тот, в свою очередь, механически сопряжен с выходным валом и отвечает за корректирование его положения.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса. Как только он сравняется с управляющим импульсом, двигатель прекратит свою работу.
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
tehprivod.su
Сервоприводы. Виды и устройство. Характеристики и применение
Сервоприводы и механизмы оснащены датчиком, который отслеживает определенный параметр, например усилие, положение или скорость, а также управляющий блок в виде электронного устройства. Задачей этого устройства является поддержание необходимых параметров в автоматическом режиме во время функционирования устройства, в зависимости от вида поступающего сигнала от датчика в определенные периоды времени.
Устройство и работа
От обычного электродвигателя сервопривод отличается тем, что можно задать точное положение вала в градусах. Сервоприводы – это любые механические приводы, которые включают в себя датчик некоторого параметра и блок управления, который способен автоматически поддерживать требуемые параметры, соответствующие определенным внешним значениям.
1 — Шестерни редуктора
2 — Выходной вал
3 — Подшипник
4 — Нижняя втулка
5 — Потенциометр
6 — Плата управления
7 — Винт корпуса
8 — Электродвигатель постоянного тока
9 — Шестерня электродвигателя
Для преобразования электрической энергии в механическое движение, необходим электродвигатель. Приводом является редуктор с электродвигателем. Редуктор требуется для снижения скорости двигателя, так как скорость слишком большая для применения. Редуктор состоит из корпуса, в котором расположены валы с шестернями, способными преобразовывать и передавать крутящий момент.
Путем запуска и останова электродвигателя можно приводить в движение выходной вал редуктора, который связан с шестерней сервопривода. К валу можно присоединять устройство или механизм, которым требуется управлять. Кроме этого для контроля положения вала требуется наличие датчика обратной связи. Этот датчик может преобразовать угол поворота снова в сигнал электрического тока.
Такой датчик получил название энкодера. В качестве энкодера может применяться потенциометр. Если бегунок потенциометра поворачивать, то будет изменяться его сопротивление. Значение этого сопротивления прямо пропорционально зависит от угла поворота потенциометра. Таким образом, есть возможность добиться установки определенного положения механизма.
Кроме выше названного потенциометра, редуктора и электродвигателя, сервоприводы оснащены электронной платой, которая обрабатывает поступающий сигнал внешнего значения параметра от потенциометра, сравнивает, и в соответствии с результатом сравнения запускает или останавливает электродвигатель. Другими словами эта электронная начинка отвечает за поддержку отрицательной обратной связи.
Подключение сервопривода осуществляется тремя проводниками, два из которых подают питание напряжением электродвигателя, а по третьему проводнику поступает сигнал управления, с помощью которого выполняется установка положения вала двигателя.
Кроме электродвигателя, играть роль привода может и другой механизм, например пневматический цилиндр со штоком. В качестве датчика обратной связи применяют также датчики поворота угла, либо датчик Холла. Управляющий блок является сервоусилителем, частотным преобразователем, индивидуальным инвертором. Он может содержать также и датчик сигнала управления.
При необходимости создания плавного торможения или разгона для предотвращения чрезмерных динамических нагрузок двигателя, выполняют схемы более сложных микроконтроллеров управления, которые могут контролировать позицию рабочего элемента намного точнее. Подобным образом выполнено устройство привода установки позиции головок в компьютерных жестких дисках.
Виды сервоприводов
При необходимости создания управления несколькими группами сервоприводов используют контроллеры с ЧПУ, которые собраны на схемах программируемых логических контроллеров. Такие сервоприводы способны обеспечить крутящий момент 50 Н*м, мощностью до 15 киловатт.
Синхронные способны задать скорость вращения электродвигателя с большой точностью, так же как ускорение и угол поворота. Синхронные виды приводов могут быстро достигать номинальной скорости вращения.
Асинхронные способны точно выдерживать скорость даже на очень низких оборотах.
Сервоприводы принципиально разделяют на электромеханические и электрогидромеханические. Электромеханические приводы состоят из редуктора и электродвигателя. Но их быстродействие оказывается намного меньше. В электрогидромеханических приводах движение создается путем движения поршня в цилиндре, вследствие чего быстродействие оказывается на очень высоком уровне.
Характеристики сервоприводов
Рассмотрим основные параметры, которые характеризуют сервоприводы:
- Усилие на валу. Этот параметр является крутящим моментом. Это наиболее важный параметр сервопривода. В паспортных данных чаще всего указывается несколько значений момента для разных величин напряжения.
- Скорость поворота также является важной характеристикой. Она указывается в эквиваленте времени, необходимом для изменения позиции выходного вала привода на 60 градусов. Этот параметр также могут указывать для нескольких значений напряжения.
- Тип сервоприводов бывает аналоговый или цифровой.
- Питание. Основная часть сервоприводов функционирует на напряжении 4,8-7,2 вольта. Питание подается чаще всего по трем проводникам: белый – сигнал управления, красный – напряжение работы, черный – общий провод.
- Угол поворота – это наибольший угол, на который выходной вал способен повернуться. Чаще всего этот параметр равен 180 или 360 градусов.
- Постоянного вращения. При необходимости обычный сервопривод можно модернизировать для постоянного вращения.
- Материал изготовления редуктора сервоприводов бывает различным: карбон, металл, пластик, либо комбинированный состав. Шестерни, выполненные из пластика, не выдерживают ударных нагрузок, однако обладают высокой износостойкостью. Карбоновые шестерни намного прочнее пластмассовых, но имеют высокую стоимость. Шестерни из металла способны выдержать значительные нагрузки, падения, но имеют низкую износостойкость. Выходной вал редуктора устанавливают по-разному на разных моделях: на втулках скольжения, либо на шариковых подшипниках.
Преимущества
- Легкость и простота установки конструкции.
- Безотказность и надежность, что важно для ответственных устройств.
- Не создают шума при эксплуатации.
- Точность и плавность передвижений достигается даже на малых скоростях. В зависимости от поставленной задачи разрешающая способность может настраиваться работником.
Недостатки
- Сложность в настройке.
- Повышенная стоимость.
Применение
Сервоприводы в настоящее время используются достаточно широко. Так, например, они применяются в различных точных приборах, промышленных роботах, автоматах по производству печатных плат, станках с программным управлением, различные клапаны и задвижки.
Наиболее популярными стали быстродействующие приводы в авиамодельном деле. Серводвигатели имеют достоинство в эффективности расхода электрической энергии, а также равномерного движения.
В начале появления серводвигателей использовались коллекторные трехполюсные моторы с обмотками на роторе, и с постоянными магнитами на статоре. Кроме этого, в конструкции двигателя был узел с коллектором и щетками. Далее, по мере технического прогресса число обмоток двигателя увеличилось до пяти, а момент вращения возрос, так же как и скорость разгона.
Следующим этапом развития серводвигателей было расположение обмоток снаружи магнитов. Этим снизили массу ротора, уменьшили время разгона. При этом стоимость двигателя увеличилась. В результате дальнейшего проектирования серводвигателей было решено отказаться от наличия коллектора в устройстве двигателя. Стали применяться двигатели с постоянными магнитами ротора. Мотор стал без щеток, эффективность его возросла вследствие увеличения крутящего момента, скорости и ускорения.
В последнее время наиболее популярными стали сервомоторы, работающие от программируемого контроллера (Ардуино). Вследствие этого открылись большие возможности для проектирования точных станков, роботостроения, авиастроения (квадрокоптеры).
Так как приводы с моторами без коллекторов обладают высокими функциональными характеристиками, точным управлением, повышенной эффективностью, они часто применяются в промышленном оборудовании, бытовой технике (мощные пылесосы с фильтрами), и даже в детских игрушках.
Сервопривод отопления
По сравнению с механической регулировкой системы отопления, электрические сервоприводы являются наиболее совершенными и прогрессивными техническими устройствами, обеспечивающими поддержание параметров отопления помещений.
1 — Блок питания
2 — Комнатные термостаты
3 — Коммутационный блок
4 — Серводвигатели
5 — Подающий коллектор
6 — Обход
7 — Водяной теплый пол
8 — Обратный коллектор
9 — Датчик температуры воды
10 — Циркулярный насос
11 — Шаровый клапан
12 — Регулировочный клапан
13 — Двухходовой термостатический клапан
Привод системы отопления функционирует совместно с термостатом, установленным на стену. Кран с электрическим приводом монтируется на трубе подачи теплоносителя, перед коллектором теплого водяного пола. Далее выполняется подключение питания 220 вольт и настройка терморегулятора рабочего режима.
Система управления оснащается двумя датчиками. Один из них расположен в полу, другой в помещении. Датчики передают сигналы на термостат, управляющий сервоприводом, который соединен с краном. Повысить точность регулировки можно путем установки дополнительного прибора снаружи помещения, так как условия климата непрерывно изменяются, и оказывают влияние на температуру в комнате.
Привод механически соединен с клапаном для его управления. Клапаны могут быть двух- и трехходовыми. Двухходовой клапан может изменять температуру воды в системе. Трехходовой клапан способен поддерживать температуру неизменной, однако изменяет потребление горячей воды, которая подается в контуры. В устройстве трехходового клапана имеется два входа для горячей воды (трубы подачи) и выход обратной воды, через который подается смешанная вода с заданной температурой.
Смешивание воды происходит с помощью клапана. При этом осуществляется регулировка подачи теплоносителя в коллекторы. При открывании одного входа, другой начинает закрываться, а расход воды на выходе не изменяется.
Сервоприводы багажника
В настоящее время современные автомобили чаще всего стали производит с функцией автоматического открывания багажника. Для такой цели применяют рассмотренную нами конструкцию сервопривода. Автопроизводители используют два метода для оснащения такой функцией автомобиля.
Конечно, пневмопривод багажника более надежен, однако его стоимость достаточно высока, поэтому в автомобилях такой привод не нашел применения.
Электрический привод выполняется с разными способами управления:
- Рукояткой на крышке багажника.
- Кнопкой на панели двери водителя.
- С пульта сигнализации.
Открывать багажник вручную не всегда бывает удобным. Например, зимой замок имеет свойство замерзать. Сервопривод дополнительно выполняет функцию защиты автомобиля от чужого проникновения, так как совмещен с устройством замка.
Такие приводы багажника используются на некоторых импортных автомобилях, однако, можно установить такой механизм и на отечественных машинах, было бы желание.
Существуют приводы багажника с магнитными пластинами, однако они не нашли применения, так как их устройство достаточно сложное.
Наиболее приемлемыми по цене являются сервоприводы багажника, которые выполняют только открывание. Функция закрывания для них недоступна. Также можно выбрать конструкцию модели привода, имеющего инерционный механизм. Он играет роль блокировки при появлении препятствия при движении багажника.
Дорогостоящие модели сервоприводов включают в себя механизм подъема и опускания багажника, доводчика механизма запирания, датчиков и контроллера. Обычно их на автомобилях устанавливают на заводе, однако простые конструкции вполне можно монтировать самостоятельно.
Похожие темы:
electrosam.ru
подключение, управление, скетчи Ардуино [Амперка / Вики]
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.
Понятие сервопривода
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Иными словами:
Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
Блок управления сравнивает это значение со значением на своём датчике
На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Наиболее распространены сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Типичный хобби-сервопривод изображён ниже.
Каким же образом устроены сервоприводы?
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
Характеристики сервоприводов
Теперь давайте разберёмся, какие бывают сервоприводы и какими характеристиками они обладают.
Крутящий момент и скорость поворота
Сначала поговорим о двух очень важных характеристиках сервопривода: о крутящем моменте и о скорости поворота.
Момент силы, или крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Проще говоря, эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Стоит отметить, что иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Конечно, мы всегда можем взять установку, потребляющую большую мощность, главное, чтобы её характеристики удовлетворяли нашим потребностям.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
маленькие
стандартные
большие
Обладают они при этом следующими характерными габаритами:
| Вес | Линейные размеры | |
|---|---|---|
| маленькие | 8-25 г | 22×15×25 мм |
| стандартные | 40-80 г | 40×20×37 мм |
| большие | 50-90 г | 49×25×40 мм |
Бывают ещё так называемые сервоприводы «специального вида» с габаритами, не попадающими в данную классификацию, однако процент таких сервоприводов весьма мал.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Функционал библиотеки Servo
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого заводится переменная типа Servo. Управление осуществляется следующими функциями:
attach()— присоединяет переменную к конкретному пину. Возможны два варианта синтаксиса для этой функции:servo.attach(pin)иservo.attach(pin, min, max). При этомpin— номер пина, к которому присоединяют сервопривод,minиmax— длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно.write()— отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис следующий:servo.write(angle), гдеangle— угол, на который должен повернуться сервопривод.writeMicroseconds()— отдаёт команду послать на сервоприводимульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий:servo.writeMicroseconds(uS), гдеuS— длина импульса в микросекундах.read()— читает текущее значение угла, в котором находится сервопривод. Синтаксис следующий:servo.read(), возвращается целое значение от 0 до 180.attached()— проверка, была ли присоединена переменная к конкретному пину. Синтаксис следующий:servo.attached(), возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае.detach()— производит действие, обратное действиюattach(), то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис следующий:servo.detach().
Пример использования библиотеки Servo
- servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(0); myservo2.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500); }
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.h> // создаём объект для управления сервоприводом Servo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Вместо заключения
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
wiki.amperka.ru
Серводвигатели против шаговых двигателей — ООО «Артель» ЛТД
Серводвигатели против шаговых двигателей.
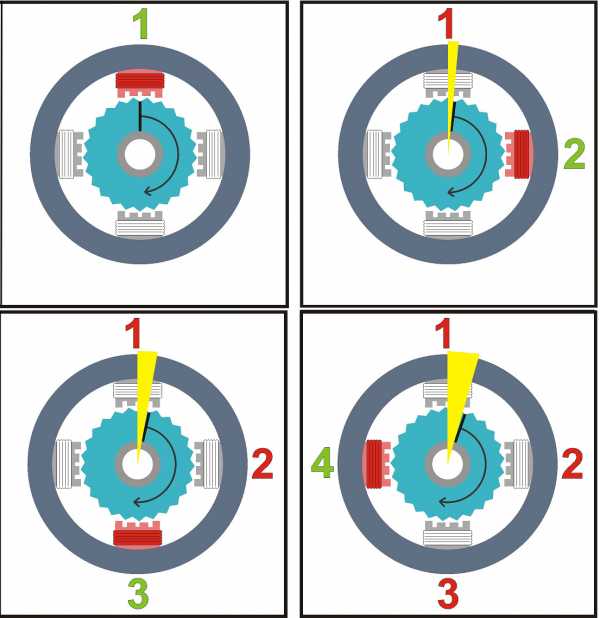
Что такое шаговый электродвигатель и принцип его работы:Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.

Шаговые двигатели можно отнести к группе бесколлекторных двигателей постоянного тока. Шаговые двигатели, имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. При увеличении скорости двигателя, уменьшается вращающийся момент.
Шаговые двигатели делают больше вибрации, чем другие типы двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. За счет этого шаговый двигатель во время работы очень шумный. Вибрация может быть очень сильная, что может привести двигатель к потери момента. Это связано с тем, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения.
Типы:
Существует четыре главных типа шаговых двигателей:
- Шаговые двигателя с постоянным магнитом
- Гибридный шаговые двигателя
- Двигатели с переменным магнитным сопротивлением
- Биполярные и униполярные шаговые двигатели
Преимущества Шагового двигателя:
- Устойчив в работе
- Работает в широком диапазоне фрикционных и инерционных нагрузок и скоростей, скорость пропорциональна частоте входных импульсов.
- Нет необходимости в обратной связи
- Намного дешевле других типов двигателей
- Подшипники — единственный механизм износа, за счет этого долгий срок эксплуатации.
- Превосходный крутящий момент при низких скоростях или нулевых скоростях
- Может работать с большой нагрузкой без использования редукторов
- Двигатель не может быть поврежден механической перегрузкой
- Возможность быстрого старта, остановки, реверсирования
Главным преимуществом шаговых приводов является точность. При подаче потенциалов на обмотки, шаговый двигатель повернется строго на определенный угол. Шаговый привод, можно приравнять к недорогой альтернативе сервоприводу, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки шагового двигателя:
- Постоянное потребление энергии, даже при уменьшении нагрузки и без нагрузки
- У шагового двигателя существует резонанс
- Из-за того что нет обратной связи, можно потерять положение движения.
- Падение крутящего момента на высокой скорости
- Низкая ремонтопригодность
Применение.
Шаговые двигателя имеет большую область применения в машиностроении, станках ЧПУ, компьютерной технике, банковских аппаратах, промышленном оборудовании, производственных линиях, медицинском оборудовании и т.д.
Что такое серво двигатель и принцип его работы:
Серводвигателя делятся на категории щеточные (коллекторные) и без щеточные (без коллекторные) . Щеточные (коллекторные) серводвигатели могут быть постоянного тока, без коллекторные серводвигатели могут быть постоянного и переменного тока. Серводвигатели с щетками (коллекторные), имеют один недостаток каждые 5000 часов необходима замена щеток. На серводвигателях всегда есть обратная связь, это может быть энкодер или резольвером. Обратная связь необходима, чтобы достичь необходимой скорости, либо получить нужный угол поворота. В случаях высоких нагрузок и если скорость окажется ниже требуемой величины, ток пойдет на увеличение , пока скорость не достигнет нужной величины, если сигнал скорости покажет, что скорость больше, чем нужно, ток, пойдет на уменьшение. При использовании обратной связи по положению, сигнал о положении можно использовать чтобы остановить двигатель, после того, как ротор двигателя приблизится к нужному угловому положению.
АС серводвигатель — двигатель переменного тока. В ценообразовании двигатель переменного тока дешевле двигателя постоянного тока. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели и коллекторные.
В синхронных двигателях переменного тока ротор и магнитное поле вращается синхронно с одинаковой скоростью и в одном направлении с статором, а в асинхронных двигателях переменного тока ротор вращается несинхронно по отношению с магнитным полем. В асинхронном двигателе из-за отсутствия коллектора (щетки) регулировка оборотов происходит за счет изменения частоты и напряжения.
DC серводвигатель — двигатель постоянного тока.
Серводвигатели постоянного тока из за своих динамических качеств могут быть использованы приводом непрерывного действия. Серводвигатели постоянного тока могут постоянно работать в режимах старт, остановка и работать в обоих направлениях вращения. Обороты и развиваемый крутящий момент можно изменять путем изменения величины напряжения тока питания или импульсами.
Преимущества серводвигателей:
- При малых размерах двигателя можно получить высокую мощность
- Большой диапазон мощностей
- Отслеживается положение, за счет использования обратной связи
- Высокий крутящий момент по отношении к инерции
- Возможность быстрого разгона и торможения
- При высокой скорости, высокий крутящий момент
- Допустимый предел шума при высоких скоростях
- Полное отсутствия резонанса и вибрации
- Точность позиционирования
- Широкий диапазон регулирования скорости.
- Точность поддержания скорости и стабильность вращающего момента.
- Высокий статический момент Мо при нулевой скорости вращения.
- Высокая перегрузочная способность: Mmax до 3.5Mo, Imax до 4Io
- Малое время разгона и торможения, высокое ускорение (обычно > 5 м/с2 ).
- Малый момент инерции двигателя, низкий вес, компактные размеры.
Пример работы двигателя:
На данном примере я перескажу вам принцип работы серводвигателя. После того, как вы сгенерировали управляющую программу, она создается в системе G-кодов, то есть ваша линия, окружность или любой созданный вами объект конвертируется в перемещение по координатам X,Y, Z на определённое расстояние. За расстояние отвечают импульсы, которые подаются через блок управления на двигатель. При перемещении любой из осей, например на 100 мм, драйвер (блок управления) подает определённое напряжение на двигатель, вал двигателя (ротор). Вал двигателя соединен с ходовым винтом (ШВП), вращение оборотов двигателя отслеживается энкодер. При вращении ходового винта по любой из осей, потому что при использовании серво, энкодеры (обратная связь) устанавливаются на тех осях, где вы хотите определить положение, на энкодер подаются импульсы, которые считываются системой управления ЧПУ. Системы ЧПУ программируются так, что ни понимают что, например, для перемещения на 100 мм необходимо получить определенное количество импульсов. Пока система ЧПУ не получит нужное количество импульсов на вход драйвера (блока управления) будет подаваться напряжение задания (рассогласование). Когда портал станка проедет заданные 100 мм, система ЧПУ получит нужное количество импульсов и напряжение на входе драйвера упадет до 0 и двигатель остановится. Прошу вас заметить, что преимущество обратной связи в том, что если по какое то либо причине произойдет смещение портала станка, энкодер отправит на систему управления нужное количество импульсов, для подачи нужного напряжения на согласования драйвера (блока управления), и двигатель поменяет угол. Для того что разногласие было равно 0, это помогает удерживать станок в заданной точке с высокой точностью. Не все типы двигателей способны, обеспечивать динамику разгона, нужный крутящий момент и т. п.
Сравнительная характеристика по основным параметрам | ||
|---|---|---|
| Шаговые двигатели | Серво двигателя | |
|
Срок эксплуатации и обслуживание |
Шаговые двигатели – нет щеток, это увеличивает срок эксплуатации до многих лет, единственным слабым местом являются подшипники, могут работать в большом диапазоне высоких температур. Срок эксплуатации в разы дольше любого типа двигателя. |
Из всех видов серво двигателей, самые дешевые это двигателя коллекторного типа (со щетками), они менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы. |
|
Ремонт |
Очень тяжело повредить и износить подшипник. Как и в любом двигателе возможно повреждение обмотки двигателя. Из низкой цены проще купить новый шаговый двигатель. |
В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
|
Точность перемещений |
При использование точных механизмов, может быть не ниже +/- 0.01 мм |
сервоприводы имеют высокую динамическую точность до 1-2мкм и выше (1 мкм = 0.001 мм) |
|
Скорость перемещения |
В лазерно гравировальных станках скорость 20 – 25 метров в минуту. Если мы говорим о фрезерных станках ЧПУ с тяжелыми порталами и балками. Максимальная скорость перемещения до 9 м/мин. |
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин при использование высокосортной механике. |
|
Скорость разгона |
до 120 об/мин за секунду |
до 1000 об/мин за 0,2 секунды |
|
Потеря шагов при повышении скорости и нагрузки |
При высоких скоростях и высоких нагрузках происходит потеря шагов. Эта не проблема возможна при воздействии внешних факторов: ударов, вибраций, резонансов и т.п. |
У серво двигателей присутствует обратная связь, что полностью исключает потерю шагов. |
|
Принудительная остановка (столкновение с препятствием) |
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений |
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть! |
|
Разница в цене |
По цене шаговый двигатель намного дешевле своего товарища серво двигателя. |
Минимум в 1,5 раз дороже шагового двигателя. |
Каждый тип двигателя предназначен для своей задачи. В некоторых случаях нужно использовать шаговых двигатель, а для некоторых задач необходимо использовать только серво двигатель. В фрезерных станках ЧПУ широко используются оба типа двигателей, просто у каждого из них есть свои задачи, и иногда не целесообразно переплачивать за серво, при небольших объемах производства.
Подведем черту сравнения серводвигателей и шаговых двигателей:
Как и было сказано раньше, шаговый двигатель не может вам дать высокую скорость и мощность и поэтому одно из его применений — в станках ЧПУ недорого сегмента, например фрезерных деревообрабатывающих станках с ЧПУ «АртМастер» 2112, 2515, 3015базовой комплектации. Данный вид станков на средней скорости покроет большой ассортимент работ: обработки дерева, пластика, ДСП, МДФ, легких металлов и других материалов.Если же вас не устраивают скоростные характеристики, Вам необходимо рассмотреть фрезерные деревообрабатывающие станки с ЧПУ «АртМастер» 2112, 2515, 3015(авт.) и высокоскоростной фрезерный деревообрабатывающий станок «АртМастер 3015 Racer».
Вы всегда должны для себя понимать, что сервомоторы позволяют вам с экономить время на холостых переходах, при этом вы не должны забывать правильно оптимизировать количество проходов. Скорость фрезеровки всегда зависит от мощности режущего инструмента (электрошпинделя) и типа фрезы. Мы не сможете получить хорошую скорость фрезеровки при низком качестве инструмента. Вы получите либо брак в изделии, либо Вам потребуется постоянная замена режущего инструмента. То есть при использовании высоких скоростей, при обработке материала вы не должны забывать о качестве и типе инструмента для фрезеровки. Дорогой инструмент не только быстрее режет, но и служит дольше. И прошу не забывать другое преимущество серво: высокая скорость и производительность в разы выше, чем у шагового при фрезеровке объёмных изображений (фото), резьбы (фото). При наличии смены инструмента, вакуумного стола вы можете оптимизировать ваше производство и минимизировать отходы.Если вы хотите добиться увеличения объёмов выполненной работы на вашем производстве, решение только одно — сервомоторы, а для старта или изготовления фасадов, дверей, столешниц, и прямолинейного, криволинейного раскроя при объёмах производства от 500-1000 кв.м, вы можете остановить свой выбор на станках с шаговыми двигателями.
artelua.com
Что такое серводвигатель
Серводвигатель – это специальный электродвигатель с отрицательной обратной связью, который предназначен для применения в станках с ЧПУ. Серводвигатели обладают достаточно высокими скоростными характеристиками, а также высокой точностью позиционирования.
Серводвигатель – это неприхотливый рабочий элемент, который входит в состав промышленного оборудования. При правильной эксплуатации серводвигатель способен работать 24 часа в сутки.
История серводвигателя
Современные серводвигатели соединили в себе все достижения научно-технического инновационного прогресса, поэтому способны развивать огромные скорости вращения при весьма высокой мощности. Большой диапазон регулировки вращения вала серводвигателя средствами программного обеспечения при существенном ускорении или торможении, делает это оборудование просто незаменимым для применения в станках или поточных линиях и многих других конструкциях.
Сравнение шаговых двигателей и серводвигателей
Как известно серводвигатели сочетают в себе достаточно большую мощность и компактность. Однако данные моторы могут функционировать, только если в наличии имеется электронный блок. Связка сервомотора и электронного управляющего модуля именуется – сервоприводом. Одно из основных достоинств сервомоторов перед ШД (шаговыми двигателями), это, безусловно, плавностью хода. Присутствие обратной связи создает условия для точного позиционирования положения, а также скорости вращения вала сервомотора.
Отличие шаговых двигателей
Как правило, шаговые двигатели для управления их работой тоже требуют наличия электронных блоков, однако в отличие от сервомоторов они не требуют обратной связи и функционируют в своем дискретном режиме. Непосредственно сам шаговый двигатель – это электродвигатель особой конструкции, который преобразует задающие ему импульсы в дискретное перемещение с определенным количеством шагов.
В целом же, шаговые двигатели применяются в тех случаях, когда за счет полного отсутствия модуля обратной связи требуется уменьшить стоимость привода. По принципу работы, серводвигатели с шаговыми электромоторами во многом схожи и в некоторых случаях даже могут использовать стандартные электронные устройства.
Применение шаговых двигателей
Шаговые двигатели можно использовать в современных наукоемких устройствах, потому как точность их функционирования достаточно высока. Поэтому, даже, несмотря на интенсивность реализовываемых функций, в работе они неприхотливы, долговечны и очень надежны. Шаговые электродвигатели интегрируются в различные системы автоматизации производства, например, начиная от станков с ЧПУ (числовым программным управлением) и оканчивая аналитическими приборами.
Если нет потребности в слишком высокой точности работы исполняющего механизма и плавности движения при «не» больших скоростях подачи, то приобретение дискретного устройства позволит существенно сократить расходы на оборудование, тем самым сэкономив средства, потому как стоимость шагового двигателя вместе с управляющим блоком, существенно ниже сервопривода.
Шаговые двигатели относятся к типу безколлекторного оборудования постоянного тока. Поэтому, как и любые двигатели, где отсутствует коллектор, они обладают достаточно высокой надежностью и значительным сроком службы. По сравнению с традиционным включением двигателей постоянного тока, шаговые двигатели требуют присутствия электронных схем коммутации специальных обмоток во время работы. Шаговый двигатель, это весьма и весьма дорогое устройство, поэтому если точность позиционирования не значительна, в место них целесообразней всего использовать обычные коллекторные двигатели.
interlaser.ru
