3. Теорема штейнера
Любое из тел может быть расположено на различных расстояниях от оси вращения стола (фиксация расстояний с шагом 20 мм). Для проверки теоремы Штейнера измерить моменты инерции стола с двумя цилиндрами массой m=1011г на различных расстояниях от оси вращения стола. Результаты записать в предложенную таблицу.
Таблица 6.1
Расстояние цилиндров от оси r, см | 4 | 6 | 8 | 10 | ||||
Период колебаний стола Т, мс | ||||||||
Момент инерции I = I0T2/T02 , г м2 | ||||||||
Контроль: I/r2, г | ||||||||
; ;j = 1,2,3.
r1 = 4 см; r2 = 6 см; r3 = 8 см; r4 = 10 см.
4. Измерение момента инерции с помощью пружин известной жесткости (эксперименты на шкиве стойки стола)
Для получения колебательной системы через шкив радиуса R стойки перекидывается длинная нить, концы которой посредством двух пружин прикрепляются к зацепам на основании стойки.
kпар = Н/м.
Момент инерции не нагруженного шкива
Период колебаний шкива Тшк = мс при R = мм;
Момент
инерции шкива Iшк = kпарR2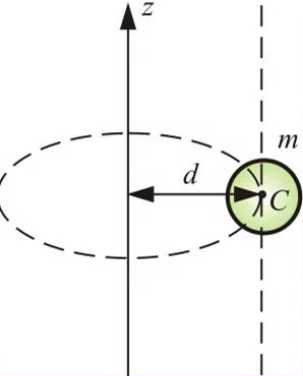 /(42)
= г
м2.
/(42)
= г
м2.
Момент инерции стержня
L = мм, m = г
Период колебаний шкива со стержнем
Т = мс.
Момент инерции шкива со стержнем
I = kпарR2Т2/(42) = г м2.
Момент инерции стержня:
Расчётное значение:
Iст= mL2/12 = г м2.
По результатам измерений
Icт = I – Iшк =
Сделать сравнительный анализ с методом п. 2.
Лабораторная работа № 7 определение отношения Ср/Сv для воздуха по клеману-дезорму
Цель работы: познакомиться с одним из методов определения Ср/Сv.
Приборы и принадлежности: установка ЛКТ-5, шланг с грушей-помпой, переходной шланг, мембранный манометр, емкость с водой.
Краткие теоретические сведения
Состояние газа характеризуется тремя величинами – параметрами состояния: давлением Р, объёмом V, и температурой Т. Уравнение связывающее эти величины, называется уравнением состояния газа. Для идеального газа уравнением состояния является уравнение Менделеева – Клапейрона:
 , (7.1)
, (7.1)
где m – масса газа, — масса одного моля, R – универсальная газовая постоянная. Для одного моля:
. (7.2)
Теплоёмкостью тела называется количество теплоты, которое нужно сообщить телу, чтобы изменить его температуру на один градус:
 (Дж/К).
(Дж/К).
Здесь dТ – изменение температуры тела при сообщении ему количества теплоты dQ.
Теплоёмкость единицы массы тела называется удельной теплоёмкостью:
 (Дж/кг
К).
(Дж/кг
К).
Теплоёмкость одного моля вещества называется молярной теплоёмкостью:
 (Дж/моль
К). (7.3)
(Дж/моль
К). (7.3)
Величина теплоёмкости газа зависит от условий его нагревания, т.е. от того, нагревается ли газ при постоянном объёме (обозначим молярную теплоёмкость в этом случае через Сv) или процесс нагревания происходит при постоянном давлении (Ср). Сv и С
dQ = dU + dA. (7.4)
Элементарная работа
dA = P dV. (7.5)
Исходя из определения молярной теплоёмкости (7.3):
 .
.
При изохорическом процессе V = const, следовательно, dV = 0 и dA = 0 (см. формулу (7.5)), и поэтому
Сv = 
При изобарическом процессе Р = const, следовательно,
 . (7.7)
. (7.7)
Из уравнения состояния газа (7.2) получаем
Р dV + V dP = R dT.
Но dP = 0 (т.к. Р = const), а поэтому P dV = R dT.
Учитывая это равенство и заменяя dU через Сv dT, из выражения (7.7) получим
Ср = Сv + R.
Таким образом Ср > Cv: при нагревании при постоянном давлении тепло, сообщённое газу, идёт не только на изменение его внутренней энергии, но и на совершение газом работы.
Важную роль в термодинамике играет величина = С
РV = const.
Из первого начала термодинамики (7.4) для адиабатического процесса следует:
dU + dA = 0,
откуда
dA = dU = CvdT,
т.е. работа в этом случае совершается за счёт изменения запаса внутренней энергии газа.
studfiles.net
16) Теорема Гюйгенса — Штейнера
Механика
1)Измерение — процесс нахождения значения физической величины опытным путем с помощью средств измерения.
Прямые — это измерения, при которых искомое значение физической величины находят непосредственно из опытных данных. Косвенные — это измерения, при которых значение величины определяют на основании известной зависимости между искомой величиной и величинами, значения которых находят прямыми измерениями.
Погрешность измерения — оценка отклонения измеренного значения величины от её истинного значения.
Окончательный результат измерения должен быть представлен в стандартной форме записи. Для этого:
1. Абсолютную погрешность измерения округляют до первой значащей цифры, если она не единица;
2. Если первая значащая цифра в абсолютной погрешности единица, то абсолютную погрешность представляют в виде числа с двумя значащими цифрами. Значащими цифрами числа называют все его цифры, начиная с первой слева, отличной от нуля.
3. Числовое значение результата измерения представляется, так чтобы и среднее значение и абсолютная погрешность имели одинаковое число десятичных знаков после запятой.
Среднее значение результата измерения округляют до того разряда, до которого округлена абсолютная погрешность.
4. Среднее значение результата представляют в виде числа, содержащего до запятой одну значащую цифру, умноженного на десять в соответствующей степени.
2)
3) Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели.Простейшей моделью является материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь.
Система отсчета – совокупность системы координат и часов, связанных с телом, относительно которого изучается движение.
Векторный
способ Положение
материальной точки задается с помощью
радиуса-вектора относительно
некоторой неподвижной точки О.
Координатный способ
При описании этим способом с телом отчета связывают какую-либо систему координат (например, декартову).
— закон движения материальной точки
Естественный способ
В нем движение описывается с помощью параметров самой траектории, и он используется, когда траектория известна.
— закон движения точки
— средняя путевая скорость
— путь
4) Траектория – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике.
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением. Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Ско́рость — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчёта; по определению, равна производной радиус-вектора точки по времени
Средняя скорость движения – это физическая величина, равная отношению вектора перемещения точки к интервалу времени, за который это перемещение произошло.
Мгновенной скоростью мгн называется скорость в данный момент времени.
Мгновенная скорость определяется как предел отношения вектора перемещения к интервалу времени, за который это перемещение происходит, при стремлении интервала времени к нулю:
В классической механике абсолютная скорость точки равна векторной сумме её относительной и переносной скоростей:
Данное равенство представляет собой содержание утверждения теоремы о сложении скоростей[1].
Скорость движения тела относительно неподвижной системы отсчёта равна векторной сумме скорости этого тела относительно подвижной системы отсчета и скорости (относительно неподвижной системы) той точки подвижной системы отсчёта, в которой в данный момент времени находится тело.
5) Ускоре́ние — скорость изменения скорости, то есть первая производная от скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости тела при его движении за единицу времени
В общем случае ускорение направлено под углом к скорости. Составляющая ускорения, направленная вдоль скорости, называется тангенциальным ускорением . Она характеризует изменение скорости по модулю. |
Составляющая ускорения, направленная к центру кривизны траектории, т.е. перпендикулярно (нормально) скорости, называется нормальным ускорением . Она характеризует изменение скорости по направлению. |
Здесь R — радиус кривизны траектории в данной точке. Тангенциальное и нормальное ускорение взаимноперпендикулярны, поэтому модуль полного ускорения |
Углова́я ско́рость — векторная величина характеризующая скорость вращения материальной точки вокруг центра вращения. Вектор угловой скорости по величине равен углу поворота точки вокруг центра вращения за единицу времени: Углово́е ускоре́ние — псевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости движения материальной точки по окружности. При вращении точки вокруг неподвижной оси, угловое ускорение по модулю равно[1]: |
6) Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей. Приложенная к массивномутелу сила является причиной изменения его скорости или возникновения в нёмдеформаций и напряжений
Масса — величина, измеряющая количество вещества в теле, мера инерции тела по отношению к действующей на него силе
1 закон Ньютона
Если на тело не действуют силы или их действие скомпенсировано, то данное тело находится в состоянии покоя или равномерного прямолинейного движения..
2 закон Ньютона
Ускорение тела прямо пропорционально равнодействующей сил, приложенных к телу, и обратно пропорционально его массе:
3 закон Ньютона
Силы, с которыми тела взаимодействуют друг с другом, равны по модулю и направлены вдоль одной прямой в противоположные стороны.
7) Центр масс
центр инерции, геометрическая точка, положение которойхарактеризует распределение масс в теле или механической системе. Координаты Ц. м. определяютсяформулами
,
или для тела при непрерывном распределении масс
8)Внутренние силы – это силы взаймодействия между точками самой системы
Внешние силы – силы приложенные к точкам системы со стороны тел не пренадлежащих системе .
Замкнутые системы – системы где действуют только внутренние силы изолированные от внешних сил
консервати́вные си́лы (потенциальные силы) — это силы, работа которых не зависит от видатраектории, точки приложения этих сил и закона их движения, и определяется только начальным и конечным положением этой точки[1]. Равносильным определением является и следующее: консервативные силы — это такие силы, работа которых по любой замкнутой траектории равна 0.
9) Сила трения — это сила, возникающая при соприкосновении двух тел и препятствующая их относительному движению.
Трение скольжения — сила, возникающая при поступательном перемещении одного из контактирующих/взаимодействующих тел относительно другого и действующая на это тело в направлении, противоположном направлению скольжения.
Трение качения — момент сил, возникающий при качении одного из двух контактирующих/взаимодействующих тел относительно другого.
Трение покоя — сила, возникающая между двумя контактирующими телами и препятствующая возникновению относительного движения. Эту силу необходимо преодолеть для того, чтобы привести два контактирующих тела в движение друг относительно друга. Возникает при микроперемещениях (например, при деформации) контактирующих тел. Она действует в направлении, противоположном направлению возможного относительного движения.
сухое, когда взаимодействующие твёрдые тела не разделены никакими дополнительными слоями/смазками (в том числе и твердыми смазочными материалами) — очень редко встречающийся на практике случай. Характерная отличительная черта сухого трения — наличие значительной силы трения покоя;
жидкостное (вязкое), при взаимодействии тел, разделённых слоем твёрдого тела (порошком графита),жидкости или газа (смазки) различной толщины — как правило, встречается при трении качения, когда твёрдые тела погружены в жидкость, величина вязкого трения характеризуется вязкостью среды;
При деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела. Эта сила возникает вследствие электромагнитного взаимодействия между атомами и молекулами вещества. Ее называют силой упругости.
Для тонкого растяжимого стержня закон Гука имеет вид:
Здесь — сила, которой растягивают (сжимают) стержень, — абсолютное удлинение (сжатие) стержня, а — коэффициент упругости (или жёсткости).
10)механи́ческая эне́ргия описывает сумму потенциальной и кинетической энергий, имеющихся в компонентах механической системы. Механическая энергия — это энергия, связанная с движением объекта или его положением, и имеет способность совершать механическую работу
Закон сохранения механической энергии утверждает, что если тело или система подвергается действию только консервативных сил, то полная механическая энергия этого тела или системы остаётся постоянной. В изолированной системе, где действуют только консервативные силы, полная механическая энергия сохраняется.[3]
Кинети́ческая эне́ргия — скалярная функция, являющаяся мерой движения материальной точки и зависящая только от массы и модуля скорости материальных точек, образующих рассматриваемую физическую систему[1], энергия механической системы, зависящая от скоростей движения её точек в выбранной системе отсчёта. Часто выделяют кинетическую энергию поступательного и вращательногодвижения[2].
Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением[
Чтобы увеличить расстояние тела от центра Земли (поднять тело), над ним следует совершить работу. Эта работа против силы тяжестизапасается в виде потенциальной энергии тела.
Кривая — зависимость потенциальной энергии от координаты.
Связь между энергией и массой неизбежно следует из закона сохранения энергии и того факта, что масса тела зависит от скорости его движения.
11)
|
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
12) И́мпульс (Коли́чество движе́ния) — векторная физическая величина, являющаяся мерой механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
В замкнутой системе векторная сумма импульсов всех тел, входящих в систему, остается постоянной при любых взаимодействиях тел этой системы между собой.
13)
Абсолютно упругим ударом называется столкновение, при котором сохраняется механическая энергия системы тел.
Абсолютно неупругим ударом называют такое ударное взаимодействие, при котором тела соединяются (слипаются) друг с другом и движутся дальше как одно тело.
При абсолютно неупругом ударе механическая энергия не сохраняется. Она частично или полностью переходит во внутреннюю энергию тел (нагревание).
14) Мощность — это физическая величина, равная отношению работы ко времени, за который эта работа была выполнена. Коэффициент полезного действия (КПД) — это физическая величина, равная отношению полезной работы к полной работы. КПД обозначается буквой η и измеряется в процентах. Полезная работа всегда меньше полной. КПД всегда меньше 100%.
Работой A, совершаемой постоянной силой называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла α между векторами силыи перемещения (рис. 1.18.1):
15) Моме́нт ине́рции — скалярная (в общем случае — тензорная) физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Тензор инерции — в механике абсолютно твёрдого тела — тензорная величина, связывающая момент импульса тела и кинетическую энергию его вращения с его угловой скоростью:
где — тензор инерции, — угловая скорость, — момент импульса
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
,
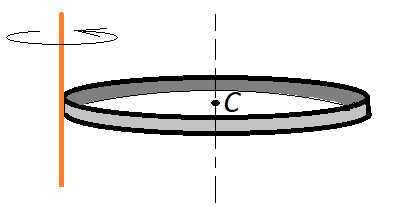
Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
где m — полная масса тела.
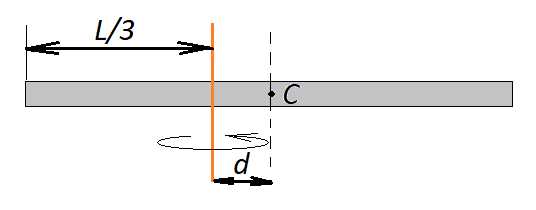
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
Кинетическая энергия вращательного движения — энергия тела, связанная с его вращением.
Основные кинематические характеристики вращательного движения тела — его угловая скорость () и угловое ускорение. Основные динамические характеристики вращательного движения — момент импульса относительно оси вращения z:
и кинетическая энергия
где Iz — момент инерции тела относительно оси вращения.
17) Момент силы — векторная физическая величина, равная векторному произведению радиус-вектора, на вектор этой силы
Плечо силы- величина, равная кратчайшему расстоянию от данной точки (центра) до линии действия силы.
— Это выражение носит название основного уравнения динамики вращательного движения и формулируется следующим образом: изменение момента количества движения твердого тела, равно импульсу момента всех внешних сил, действующих на это тело.
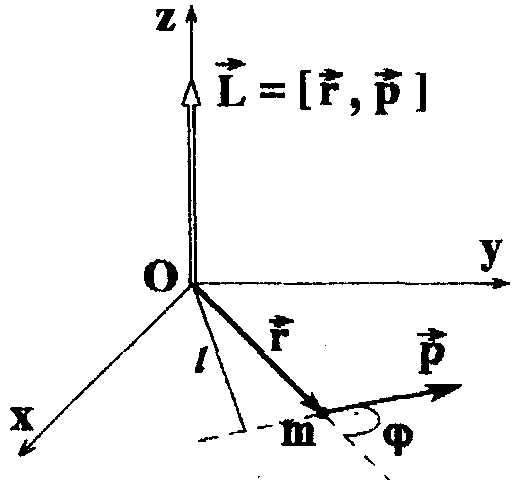
18) Момент импульса материальной точки относительно некоторого начала отсчёта определяется векторным произведением её радиус-вектора и импульса:
где — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта, — импульс частицы.
Изменение во времени момента импульса системы равно суммарному моменту всех внешних сил
.
Закон изменения момента импульса: приращение момента импульса равно импульсу суммарного момента внешних сил за время
.
Закон сохранения момента импульса: момент импульса замкнутой системы, взятый относительно любой точки инерциальной системы отсчета, не изменяется при любых процессах, происходящих внутри данной системы
.
— сохранение проекции импульса.
19) Рассмотрим действие внешней силы , приложенной к точке массой . За время элементарная масса проходит путь Работа силы на этом пути определяется проекцией силы на направление перемещения, которая очевидно, равна тангенциальной составляющей силы.
Но равна модулю момента силы относительно оси вращения. Работа , и будет положительна, если имеет такое же направление, как и отрицательное, если направление векторов и противоположны.
С учетом, что
Работа всех сил, приложенных к телу
(5.13) |
Полная работа
( |
20) Упругими называют деформации, которые исчезают после прекращения действия сил, а тела восстанавливают свою форму и объем.
Пластическими называют деформации, которые сохраняются после прекращения действия сил, а тела не восстанавливают свою первоначальную форму и объем.
Предел упругости — максимальная величина механического напряжения, при которой деформация данного материала остаётся упругой, то есть полностью исчезает после снятия нагрузки.
21)
Поступательное движение | Вращательное движение | ||
Перемещение | S | Угловое перемещение | φ |
Линейная скорость | Угловая скорость | ||
Ускорение | Угловое ускорение | ||
Масса | m | Момент инерции | I |
Импульс | Момент импульса | ||
Сила | F | Момент силы | M |
Таблицу можно продолжать и далее.
Работа:
Кинетическая энергия
22) Неинерциа́льная систе́ма отсчёта — система отсчёта, в которой не выполняется первый закон Ньютона — «закон инерции», говорящий о том, что каждое тело, в отсутствие действующих на него сил, покоится либо движется по прямой и с постоянной скоростью. Всякая система отсчета, движущаяся с ускорением или поворачивающаяся относительно инерциальной, является неинерциальной. Второй закон Ньютона также не выполняется в неинерциальных системах отсчёта. Для того чтобы уравнение движения материальной точки в неинерциальной системе отсчёта по форме совпадало с уравнением второго закона Ньютона, дополнительно к «обычным» силам, действующим в инерциальных системах, вводят силы инерции.
Силы инерции — силы, обусловленные ускоренным движением неинерциальной системы отсчета (НСО) относительно инерциальной системы отсчета (ИСО). Основной закон динамики для неинерциальных систем отсчета: , где — сила, действующая на тело со стороны других тел;
— сила инерции, действующая на тело относительно поступательно движущейся НСО. — ускорение НСО относительно ИСО. Она появляется, например, в самолете при разгоне на взлетной полосе;
— центробежная сила инерции, действующая на тело относительно вращающейся НСО. — угловая скорость НСО относительно ИСО, — расстояние от тела до центра вращения;
— кориолисова сила инерции, действующая на тело, движущееся со скоростью относительно вращающейся НСО. — угловая скорость НСО относительно ИСО (вектор направлен вдоль оси вращения в соответствии с правилом правого винта).
23) В механике большое значение имеет принцип независимости действия сил: если на материальную точку действует одновременно несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто других сил не было. Согласно этому принципу силы и ускорения можно разлагать на составляющие, использование которых приводит к существенному упрощению решения задач.
Например, нормальное и тангенциальное ускорения материальной точки определяются соответствующими составляющими силы, сообщающая материальной точке нормальное ускорение, направлена к центру кривизны траектории и потому называется центростремительной силой
24)
Первый постулат: законы физики имеют одинаковую форму во всех инерциальных системах отсчета. Этот постулат явился обобщением принципа относительности Ньютона не только на законы механики, но и на законы остальной физики. Первый постулат — принцип относительности.
Второй постулат: свет распространяется в вакууме с определенной скоростью с, не зависящей от скорости источника или наблюдателя.
Эти два постулата образуют основу теории относительности А. Эйнштейна.
studfiles.net
Формула
Наиболее легко эта задача решается для тел простых форм, вращающихся вокруг оси, проходящей через центр инерции тела С. В этом случае, для вычисления Ic можно модифицировать формулу (6.2.1),
Ic = kmR2. Моменты инерции шара, диска и стержня приведены на рис. 6.6. При вычислении момента инерции тела, вращающегося вокруг оси, не проходящей через центр инерции (рис. 6.7), следует пользоваться теоремой о параллельном переносе осей, или теоремой Штейнера
Например: стержень массой m длиной l вращается вокруг оси, проходящей через конец стержня (рис. 6.8). , .
|
ens.tpu.ru
15Момент инерции. Теорема Штейнера.
Моментом инерции тела (системы) относительно оси вращения Z называется физическая величина, равная сумме моментов инерции всех материальных точек системы, взятых относительно этой же оси, и определяемая суммой произведений масс всех материальных точек тела (системы) на квадраты их расстояний до данной оси:
Момент инерции твердого тела зависит от того, как распределена масса тела относительно интересующей нас оси, и является величиной аддитивной.
Главный момент инерции тела – это момент инерции относительно оси
вращения, проходящей через центр масс тела.
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера:
(расчет момента инерции тела. Т.Штейнера)
Дискр.и непрер.рапсредел.масс.
1)тонкий стерж.φ,масса m равном.распред.
Момент инерц.аддитивен-равен сумме мом.частей тела.
2) тонк.круг.диск R, m относ оси через центр.
– пов.пл.мас.
Колц.слой – геом.место точка,нах.на кот.площ.dS имеют один и тот же момент инерц.относ.оси y.
Т.Штейнера: о-центр масс; r-расст.
16 Кинетическая энергия вращающегося твердого тела (ось вращения неподвижна).
Кинетическая энергия тела, движущегося произвольным образом, равна сумме кинетических энергий всех n материальных точек на которые это тело можно разбить:
Если тело вращается вокруг неподвижной оси с угловой скоростью , то линейная скорость i-ой точки равна , где , — расстояние от этой точки до оси вращения. Следовательно.
где — момент инерции тела относительно оси вращения.
В общем случае движение твердого тела можно представить в виде суммы двух движений — поступательного со скоростью, равной скорости центра инерции тела, и вращения с угловой скоростью вокруг мгновенной оси, проходящей через центр инерции. При этом выражение для кинетической энергии тела преобразуется к виду
где — момент инерции тела относительно мгновенной оси вращения, проходящей через центр инерции. |
17Работа, совершаемая при вращении твердого тела.
Н
айдем работу, совершаемую внешней силой привращении твердого тела. Рассмотрим частный случай, когда сила направлена по касательной к окружности, по которой движется точка приложения силы. В этом случае сила F и перемещение ds точки ее приложения коллинеарны. Элементарная работа dА = FsRds = FsRdφ. В случае а на рис. 33.1 сила действует в направлении перемещения, поэтому Fs равна модулю силы F и dА = FsRdφ. В случае б сила и перемещение направлены в противоположные стороны, поэтому Fs = -F и dА = -FsRdφ. Как следует из рисунка, оба выражения для работы можно представить одной формулой dA = MzdφВ общем случае, когда внешняя сила направлена произвольно, ее можно разложить на три составляющие. Составляющие F|| и F┴ перпендикулярны к перемещению ds и поэтому работы не совершают. Они также не вносят вклада в Мz.Следовательно, и в этом случае работа определяется формулой dA = Mzdφ.
Поскольку направления оси z и вектора ω совпадают, формулу dA = Mzdφ можно представить в виде dA = Mωdφ, где Мω — проекция М на направление вектора ω.
studfiles.net
Момент инерции. Теорема Штейнера
Момент инерции. Теорема Штейнера.
| Моментом инерции материальной точки относительно оси вращения называется произведение массы этой точки на квадрат расстояния от оси. | |
| Моментом инерции системы (тела) относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси. | |
В случае непрерывного распределения масс эта сумма сводится к интегралу , где интегрирование производится по объему тела.
^ — момент инерции относительно главной оси вращения, проходящей через центр масс.
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Моменты инерции однородных тел массой т, имеющих правильную геометрическую форму и равномерное распределение массы по объёму:
| Тело | Положение оси вращения | ^ |
| Полый тонкостенный цилиндр радиуса R | Ось симметрии | mR2 |
| Сплошной цилиндр или диск радиуса R | Ось симметрии | |
| Прямой тонкий стержень длиной I | Ось перпендикулярна стержню и проходит через его середину | |
| Шар радиусом R | Ось проходит через центр шара | |
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера.
| Момент инерции тела ^ относительно произвольной оси z равен сумме момента его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, и произведения массы m тела на квадрат расстояния а между осями. | |
Момент инерции, по определению:
Радиус-вектор можно расписать как разность двух векторов:
,
где — радиус-вектор расстояния между старой и новой осью вращения. Тогда выражение для момента инерции примет вид:
Вынося за сумму , получим:
Поскольку старая ось проходит через центр масс, то суммарный импульс тела будет равен нулю:
Тогда:
Откуда и следует искомая формула:
,
где — известный момент инерции относительно оси, проходящей через центр масс тела.
Пример
Момент инерции стержня относительно оси, проходящей через его центр и перпендикулярной стержню, (назовём её осью ) равен
Тогда согласно теореме Штейнера его момент относительно произвольной параллельной оси будет равен
где — расстояние между искомой осью и осью . В частности, момент инерции стержня относительно оси, проходящей через его конец и перпендикулярной стержню, можно найти положив в последней формуле :
^
Абсолютно твердое тело вращается около неподвижной оси r, проходящей через него. Все точки движутся с одинаковой угловой скоростью = const. Кинетическая энергия тела
где ^ z — момент инерции тела относительно оси z.
Если тело совершает поступательное и вращательное движения одновременно, то его полная кинетическая энергия равна сумме кинетических энергий.
Из сопоставления формул кинетической энергии для поступательного и вращательного движений видно, что мерой инертности при вращательном движении служит момент инерции тела.
Моментом силы относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора , проведенного из точки О в точку А приложения силы, на силу :
Модуль момента силы М = F·r·sin a = Fl, где l = r·sina — плечо силы — кратчайшее расстояние между линией действия силы и точкой О , a — угол между r и F.
Моментом силы относительно неподвижной оси z — называется скалярная величина М, равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки О данной оси z. Значение момента не зависит от выбора положения точки О на оси z.
^
При повороте тела под действием силы на бесконечно малый угол точка приложения силы А проходит путь и работа равна
Работа вращения тела идет на увеличение его кинетической энергии
Тогда
или
откуда следует уравнение динамики вращательного движения твердого тела:
Если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то имеет место векторное равенство , где J — главный момент инерции тела (момент инерции относительно главной оси).
^
Моментом импульса (количества движения) материальной точки А относительно неподвижной точки О называется физическая величина, определяемая векторным произведением
Моментом импульса относительно неподвижной оси z называется скалярная величина L, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Значение момента импульса L не зависит от положения точки О на оси z.
При вращении абсолютно твердого тела вокруг неподвижной оси каждая точка тела движется по окружности постоянного радиуса со скоростью перпендикулярной радиусу. Момент импульса отдельной частицы равен и направлен по оси в сторону, определяемую правилом правого винта (совпадает с направлением вектора угловой скорости ).
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:
Продифференцируем по времени:
В векторной форме:
— ещё одна форма уравнения динамики вращательного движения твердого тела.
В замкнутой системе момент внешних сил = 0, следовательно, и = 0.
Закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т.е. не изменяется с течением времени:
Это — фундаментальный закон природы. Он является следствием изотропности пространства: инвариантность физических законов относительно выбора направления осей координат системы отсчета.
При равномерном вращении твердого тела относительно некоторой оси z закон сохранения момента импульса равносилен: .
Сравнительная таблица основных величин и соотношений для поступа-тельного движения тела и для его вращения вокруг неподвижной оси:
zavantag.com
Теорема Гюйгенса — Штейнера. (Викимеханика.Теорема Гюйгенса — Штейнера\.)
Теоре́ма Гю́йгенса — Ште́йнера, или просто теорема Штейнера (названа по имени швейцарского математика Якоба Штейнера и голландского математика, физика и астронома Христиана Гюйгенса): момент инерции тела относительно произвольной оси равен сумме момента инерции этого тела относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями:
где
- — известный момент инерции относительно оси, проходящей через центр масс тела,
- — искомый момент инерции относительно параллельной оси,
- — масса тела,
- — расстояние между указанными осями.
Момент инерции, по определению:
Радиус-вектор можно расписать как разность двух векторов:
- ,
где — радиус-вектор расстояния между старой и новой осью вращения. Тогда выражение для момента инерции примет вид:
Вынося за сумму , получим:
Поскольку старая ось проходит через центр масс, то суммарный импульс тела будет равен нулю:
Тогда:
Откуда и следует искомая формула:
- ,
где — известный момент инерции относительно оси, проходящей через центр масс тела.
Момент инерции стержня относительно оси, проходящей через его центр и перпендикулярной стержню, (назовём её осью ) равен
Тогда согласно теореме Штейнера его момент относительно произвольной параллельной оси будет равен
где — расстояние между искомой осью и осью . В частности, момент инерции стержня относительно оси, проходящей через его конец и перпендикулярной стержню, можно найти положив в последней формуле :
Теорема Гюйнеса — Штейнера допускает обобщение на тензор момента инерции, что позволяет получать тензор относительно произвольной точки из тензора относительно центра масс. Пусть — смещение от центра масс, тогда
где
- — вектор смещения от центра масс, а — символ Кронекера.
Как видно, для диагональных элементов тензора (при ) формула имеет вид теоремы Гюйгенса — Штейнера для момента относительно новой оси.
- Википедия — свободная энциклопедия ru.wikipedia.org
Автор: Сова Е.О. (2-ТМ-55)
dafedin.myxwiki.org
Теорема штейнера Краткая теория
При вращательном движении твердого тела вокруг неподвижной оси каждая точка тела движется в плоскости, перпендикулярной оси, по окружности, центр которой лежит на оси. Линейная скорость точки тела v связана с угловой скоростью тела.
, (1)
где r – расстояние от точки тела до оси вращения.
Кинетическая энергия тела равна сумме кинетических энергий всех частиц тела:
 ,
(2)
,
(2)
где  — элементарные
массы, на которые мысленно разбито тело.
Подставляя
скорость vi из
формулы (1) в (2), получим
— элементарные
массы, на которые мысленно разбито тело.
Подставляя
скорость vi из
формулы (1) в (2), получим
(3)
Величина  (4)
(4)
называется моментом инерции тела. Момент инерции характеризует распределение массы в твердом теле относительно оси вращения и является мерой инертности вращающегося тела.
Выражение для кинетической энергии вращающегося тела вокруг неподвижной оси, исходя из формул (3) и (4), выглядит следующим образом:
.
Для
вычисления моментов инерции различных
тел массу  в
формуле (4) выражают
через плотность тела:
в
формуле (4) выражают
через плотность тела:  = ρ ΔVi , где ΔVi –
элементарный объем тела, и переходят к
пределу ΔVi → 0. Тогда получим
= ρ ΔVi , где ΔVi –
элементарный объем тела, и переходят к
пределу ΔVi → 0. Тогда получим
. (6)
Теорема Штейнера устанавливает связь между моментом инерции тела Iс относительно оси, проходящей через центр инерции, и моментом инерции I этого тела относительно другой оси, параллельной первой .
,
где m – масса тела, а – расстояние между осями.
Контрольные вопросы
Дайте определение динамических характеристик вращательного движения: момента силы – М, момента инерции – I, момента импульса – L.
Запишите аналитические выражения для момента инерции частицы и твердого тела. Как производится расчет момента инерции обруча, стержня, диска?
В чем состоит суть теоремы Штейнера?
Получите основное уравнение динамики вращательного движения.
Получите уравнение колебаний крутильного маятника.
Как рассчитать период колебаний крутильного маятника?
Задачи
1. Однородный диск массой m = 3 кг и радиусом R = 20 см скреплен с тонким стержнем, другой конец которого закреплен неподвижно (рис.4). Коэффициент кручения стержня (отношение приложенного вращающего момента к углу закручивания)
k = 6 Н∙м/рад. Определить частоту ω малых крутильных колебаний.
2. По данным предыдущей задачи определить амплитуду αmи начальную фазу φ колебаний, если в начальный момент
α = 0,06 рад, = 0,8 рад/с.
3. Два диска могут вращаться без трения вокруг горизонтальной оси. Радиус дисков R одинаков и равен 0,5 м. Массы дисков равны m1 = 0,1 кг и m2 = 3 кг. Диски соединены пружиной, у которой коэффициент пропорциональности между возникающим вращающим моментом и углом закручивания равен k = 5,92 Н м /рад. Диски поворачивают в противоположные стороны и отпускают. Чему равен период T крутильных колебаний дисков?
4. По диаметру горизонтального диска может перемещаться, без трения по направляющему стержню небольшая муфта массой m = 0,1 кг. Муфта «привязана» к концу стержня с помощью невесомой пружины, жесткость которой k = 10 Н/м (рис. 5). Если пружина не деформирована, муфта находится в центре диска.
Найти частоту ω малых колебаний муфты в том случае, если диск вращается вокруг своей оси с угловой скоростью, равной 6 рад/с
Рис. 4 (к задаче 1) Рис. 5 (к задаче 4)
5. Сплошной однородный цилиндр массой m совершает малые колебания под действием двух пружин, суммарная жесткость которых равна k (рис. 6). Найти период этих колебаний в отсутствии скольжения.
6. Определить момент инерции системы, состоящей из четырех точечных масс m, расположенных по вершинам квадрата со стороной a, относительно оси, лежащей в плоскости квадрата и совпадающей с его диагональю.
7. По условиям предыдущей задачи определить момент инерции системы точек относительно оси, проходящей через центр квадрата перпендикулярно его плоскости.
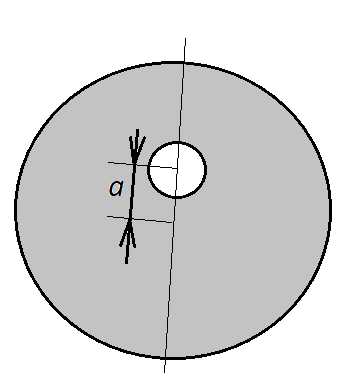
8. Определите момент инерции медного диска радиусом
R = 5 см, в котором сделаны два выреза в виде кругов радиусами r = 2 см. Центры вырезов находятся на прямой, проходящей через центр диска на расстоянии l = 2,5 см от него (рис.7). Толщина диска h = 0,1 см. Ось вращения проходит через центр диска перпендикулярно его плоскости.
Рис. 6 (к задаче 5) Рис.7 (к задаче 8)
9. По условиям предыдущей задачи определить момент инерции диска относительно оси, проходящей через центры вырезов.
10. Плотность цилиндра длиной l – 0,1 м и радиусом
R = 0,05 м изменяется с расстоянием от оси линейно от значения
ρ1 = 500 кг/м3 до значения ρ2 = 1500 кг/м3. Найти момент инерции цилиндра относительно оси цилиндра.
7. Найти момент инерции тонкого однородного стержня относительно оси, проходящей через один из его концов с помощью теоремы Штейнера. Масса стержня m, длина l.
8. По данным предыдущей задачи найти момент инерции стержня относительно оси, проходящей на расстоянии l/4 от одного из концов.
9. Найти момент инерции диска массой m, радиусом R относительно оси, проходящей через середину радиуса перпендикулярно плоскости диска. Применить теорему Штейнера.
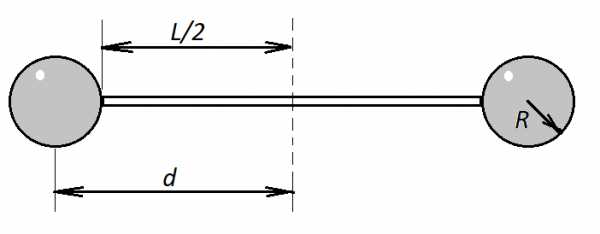
10. Определить момент инерции шара массой m = 2 кг радиусом R = 10 см относительно оси, проходящей через середину радиуса, используя теорему Штейнера.
11. По данным предыдущей задачи определить момент инерции шара, подвешенного на нити длиной l = 10 см относительно точки подвеса.
12. Два шара с массами m1 = 1 кги m2 = 2 кг насажены на гладкий горизонтальный стержень (рис. 8). Шары соединены между собой пружиной с жесткостью k = 24 Н/м. Левому шару сообщили начальную скорость v1 = 12 см/с. Найти частоту колебаний системы.
13. По данным предыдущей задачи найти энергию колебаний.
14. По данным предыдущей задачи найти амплитуду колебаний системы.
15. Найти циклическую частоту малых колебаний тонкого однородного стержня массой m и длиной l вокруг горизонтальной оси, проходящей через точку О (рис. 9). Жесткость пружины k. В положении равновесия стержень вертикален
Рис. 8 (к задаче 12) Рис. 9 (к задаче 15)
studfiles.net
