Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
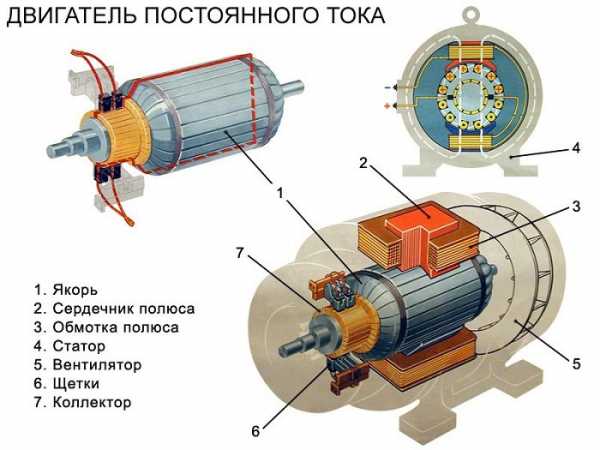
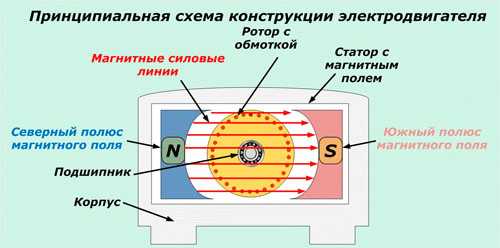
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
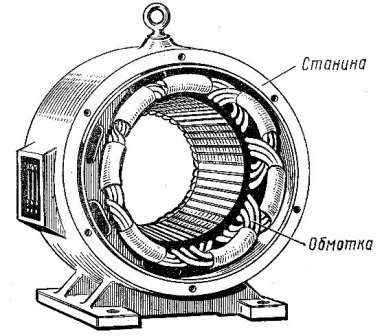
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
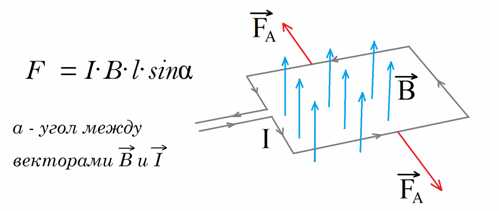
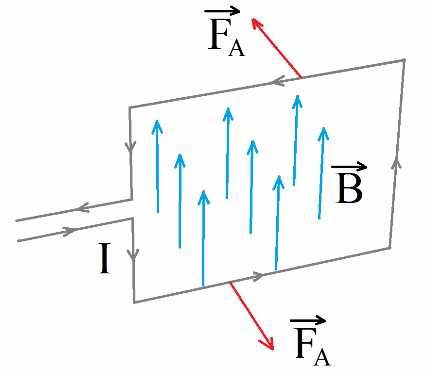
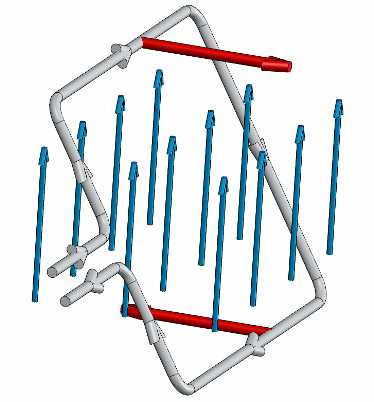
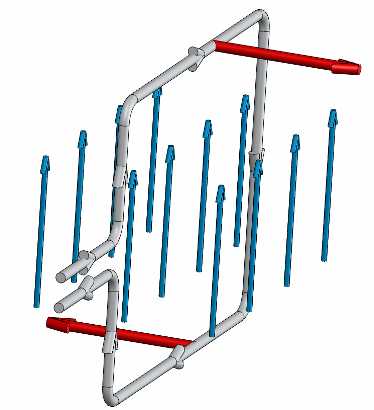
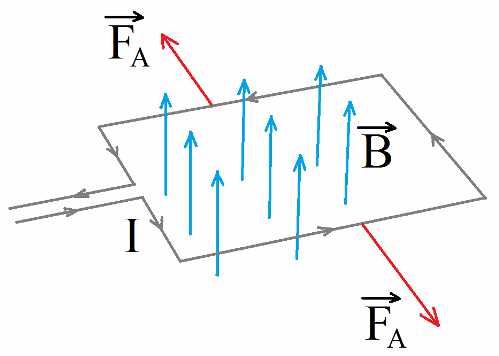
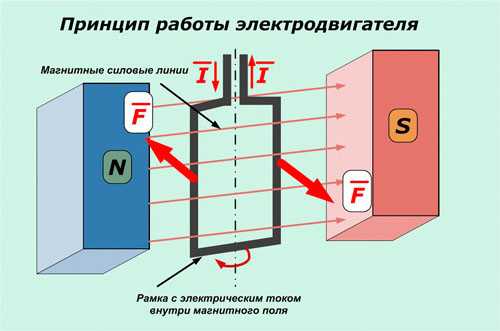
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения.
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
electrosam.ru
Содержание:
В настоящее время существует множество устройств, способных преобразовывать различные виды энергии. Среди них ведущее место занимают различные типы электродвигателей, преобразующих энергию электрического тока во вращательное движение вала. Механизмы с электродвигателями получили широкое распространение в промышленности и в быту. Для того чтобы наиболее эффективно использовать эти устройства, необходимо понимать принцип работы электродвигателя. Как устроен классический электродвигательКаждый такой агрегат по своей сути является своеобразной технико-механической системой, с основной функцией, направленной на трансформацию электрической энергии во вращательное движение вала. Физическое действие двигателей основано на всем известном явлении электромагнитной индукции. В состав электромотора входят статор и ротор, которые соответственно являются неподвижной и движущейся частью. В стандартных двигателях статор служит их наружной оболочкой, где происходит формирование неподвижных полей, обладающих магнитными свойствами. Роторная конструкция помещается внутри статора. Она включает в себя определенное число постоянных магнитов, сердечник в виде обмоток из проволоки, коллектор и щетки. Ток проходит по этим обмоткам, изготовленным из проводников, расположенных в виде многочисленных витков.
Когда электрический мотор, в том числе и с короткозамкнутым ротором, присоединяется к источнику питания, статорные и роторные поля начинают взаимодействовать между собой. Это приводит к возникновению момента вращения, вызывающего движение роторного вала агрегата. В свою очередь, энергия вращающегося вала подается к рабочему органу всего технического устройства, составной частью которого является тот или иной двигатель. В процессе преобразования электричества в механическое движение, возникают определенные энергетические потери. Это связано с силой трения, намагничиванием сердечников, нагревом проводниковых элементов и другими факторами. На КПД электродвигателя оказывает влияние даже сопротивление воздуха деталям, находящимся в движении. Тем не менее, благодаря современным технологиям, коэффициент полезного действия агрегатов нового поколения может доходить до 90%. Кроме того, эти устройства отличаются экологической чистотой и высокими эксплуатационными характеристиками. Основные типы электродвигателейСуществуют различные типы и модификации электрических двигателей, отличающихся типом питания, напряжением, пределом мощности, количеством оборотов в минуту. Они могут быть с фазным или с короткозамкнутым ротором. Эти показатели считаются основными, однако во многих случаях особое значение придается размерам и массе, а также энергетическим показателям.
Классификация основных типов электродвигателей выглядит следующим образом:
Особенности работы электромоторов постоянного токаОсновной действующий принцип работы электродвигателя постоянного тока состоит в следующих процессах. К обмотке возбуждения, называемой также индукторной обмоткой, осуществляется подача постоянного тока. В результате, создается постоянное магнитное поле, используемое для возбуждения. В моторах с использованием постоянных магнитов, создание поля происходит под их воздействием. Поступление постоянного тока происходит и в якорную обмотку. Здесь он попадает под влияние магнитного поля, созданного статором, создавая момент вращения. В результате такого воздействия, ротор совершает поворот на 90 градусов, затем его обмотки вновь коммутируются и вращающиеся движения продолжаются.
Двигатели, работающие на постоянном токе классифицируются в соответствии со способом возбуждения:
Устройство и принцип работы мотора постоянного тока зависит от многих факторов. Если подключение выполнено напрямую, то во время пуска якорный ток многократно превышает номинальное значение. Для выравнивания этих величин в цепь с якорем устанавливается пусковое сопротивление, выполненное в виде реостата. Плавность в время пуска обеспечивается ступенчатой конструкцией этого устройства. На первом этапе оказываются включены все ступени и сопротивление достигает максимального значения. По мере того как двигатель разгоняется, возникает сила, противоположная ЭДС. Она постепенно возрастает, а якорный ток снижается за счет последовательного выключения ступеней. Подача электроэнергии на якорь и обмотки возбуждения может быть отрегулирована тиристорными преобразователями, известными как приводы постоянного тока. Принцип работы электродвигателя переменного токаОсновным отличием этих агрегатов от других устройств считается возможность трансформации электрической энергии в механическую и обратно. Вращательное движение вызывают взаимодействующие магнитные поля. Одно из них относится к категории динамического или вращающегося, а другое считается статическим или постоянным, статическим. В результате их взаимодействия, вал электродвигателя начинает вращаться.
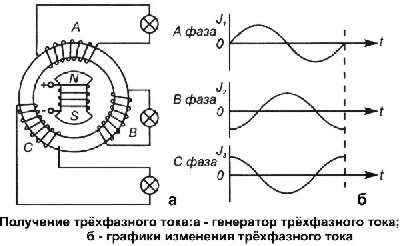
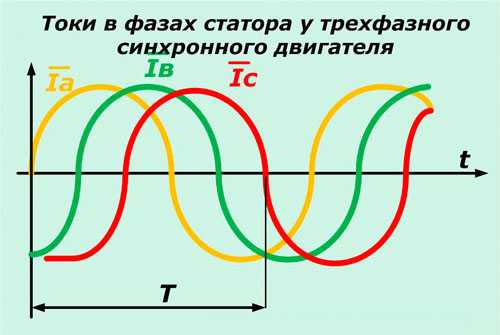
На каждом статоре электромотора наматываются обмотки в количестве трех. К каждой из них соответственно подключаются три фазы. Трехфазный ток характеризуется плавно изменяющимися параметрами напряжения и тока, течение которых имеет вид синусоидального графика. Максимальная мощность в обмотке плавно перетекает из одной ее точки в другую. На концах синусоиды, расположенных на максимальном удалении, значение этой мощности будет наименьшим. Когда напряжение с трех фаз подается к обмоткам статора, это приводит к образованию магнитного поля, вращающегося с такой же частотой, как и в сети, то есть, 50 Гц. Внутри статора расположен ротор, в котором также образуется магнитное поле. Оно отталкивается от поля статора и создает момент вращения. В общих чертах это принцип работы большинства аналогичных технических устройств. Как действуют асинхронные электромоторыСреди всех агрегатов переменного тока, чаще всего во многих сферах используются асинхронные двигатели трехфазного тока. Общий принцип работы асинхронного мотора очень простой и будет рассмотрен ниже. Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
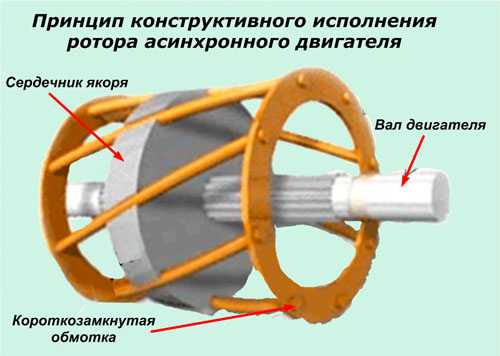
Агрегаты асинхронного типа также, как и другие, выпускаются и используются для трансформации переменного тока в механическую работу вала. Если объяснять по-простому, для чайников, понятие асинхронный возникло из-за разницы, возникающей между частотами, с которыми вращаются магнитные поля статоров и роторов. Частота у статора во всех случаях превышает частоту вращения ротора. Конструкция асинхронного двигателяВ конструкцию асинхронного электродвигателя входят две основные детали – статор и ротор. Для изготовления статора используются стальные листы, а сам он имеет форму цилиндра. В пазы конструкции укладываются обмотки из медных проводников. Их оси сдвинуты в пространстве относительно друг друга на 120 градусов. Соединение между собой концов каждой обмотки осуществляется по разным вариантам – в виде звезды или треугольником. Роторные части асинхронных моторов изготавливаются в двух вариантах. В первом случае это изделия с короткозамкнутым ротором, собираемым в форме сердечника из стальных пластинок. В его пазы заливается алюминий в расплавленном виде, что приводит к образованию стержней, коротко замкнутых с торцевыми кольцами. В агрегатах повышенной мощности алюминиевый расплав по технологии заменяется медью.
Второй вариант представляет собой фазный ротор, имеющий такую же трехфазную обмотку, аналогичную обмотке у статора. Как правило, соединение обмоток в этом случае осуществляется звездой, а их свободные концы соединяются с контактными кольцами. Эти же кольца соединяются со щетками, обеспечивающими использование добавочного резистора. Данный элемент уменьшает слишком высокое значение пусковых токов. Когда к обмотке трехфазного статора подается напряжение, во всех фазах возникает магнитный поток, изменяющийся с такой же частотой, как и в поступающем напряжении. У всех магнитных потоков имеется сдвиг на 120 градусов по отношению друг к другу. В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС. Образовавшийся ток начинает взаимодействовать с магнитным потоком статора, что, в результате, приводит к возникновению пускового момента электромотора. То есть, ротор устремляется к повороту в том же самом направлении, в каком осуществляется вращение магнитного поля статора. После того как пусковой момент превысит тормозной момент ротора, вал двигателя начнет вращаться. |

electric-220.ru
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
 Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
 Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
 Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток. 
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
 Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
zewerok.ru
Электрический двигатель: основные принципы действия электродвигателей
Принцип работы электродвигателя основан на использовании эффекта электромагнитной индукции. Само устройство предназначено для создания механической энергии за счёт использования электрических полей. Тип и мощность получаемой энергии зависят от способа взаимодействия магнитных полей и собственно устройства электродвигателя. В зависимости от типа используемого напряжения двигатели классифицируют на постоянного и переменного тока.
Электродвигатели
Электродвигатель постоянного тока
Принцип действия этих двигателей основан на использования постоянных магнитных полей, создаваемых в корпусе устройства. Для их создания служит либо постоянный магнит, закреплённый на корпусе, либо электромагниты, расположенные по периметру ротора.
Основным отличием двигателей постоянного тока является наличие в их корпусе постоянно действующего магнита, закреплённого на корпусе машины. Мощность электродвигателя зависит от этого магнита, точнее от его поля. Магнитное поле в якоре создаётся при подключении к нему постоянного тока. Но для этого необходимо, чтобы полюса постоянного магнитного поля якоря менялись местами. Для этого используются специальные коллекторно-щёточные устройства. Они устроены в виде кольца-коллектора, зафиксированного на валу движка и подключённого к обмотке якоря. Кольцо разделено на сектора, разделённые диэлектрическими вставками. Соединение сектора коллектора с цепью якоря создаётся через скользящие по нему графитные щетки. Для более плотного контакта щётки прижимаются к кольцу коллектора пружинами. Графит применяется ввиду своей скользящей способности, высокой теплопроводности и мягкости. Его применение практически не вредит проводникам коллектора.
При большой мощности электромоторов постоянного тока использование постоянного магнита неэффективно из-за большого веса такого устройства и низкой мощности создаваемого постоянным магнитом поля. Для создания магнитного поля статора в этом случае используется конструкция из ряда катушечных электромагнитов, подключённых к отрицательной или положительной линии питания. Одноименные полюсы подключаются последовательно, их количество составляет от одного до четырёх, количество щёток соответствует количеству полюсов, но, в общем, конструкция якоря практически идентична вышеописанной.
Для упрощения запуска электрического двигателя используют два варианта возбуждения:
- параллельное, при этом рядом с обмоткой якоря включается независимая регулируемая линия, используется для плавного регулирования оборотов вала;
- последовательное возбуждение, что говорит о способе подключения дополнительной линии, в этом случае существует возможность резкого наращивания количества оборотов или его снижения.
Нужно отметить, что этот тип моторов имеет регулируемую частоту оборотов, что достаточно часто используется в промышленности и транспорте.
Интересно. В станках используются двигатели с параллельным возбуждением, что позволяет использовать регулировку количества оборотов, в то же время для грузоподъёмного оборудования подходит последовательное возбуждение. Даже эта особенность двигателей поставлена на службу человечеству.
Двигатель постоянного тока
Электродвигатель переменного тока
Устройство и принцип действия электродвигателя переменного тока впервые описал и запатентовал физик Никола Тесла, патент Великобритании за номером 6481. Но этот мотор не получил широкого распространения из-за низких пусковых характеристик, не смог найти решение пуска. Нужно отметить, что Тесла являлся основным апологетом развития этого типа двигателей, в отличие от Эдисона, который как раз ратовал за использование сетей постоянного тока.
Именно Тесла открыл явление, которое получило название сдвиг фаз, и предложил использовать его в электродвигателе, кроме того он опытным путём определил его наиболее эффективное значение в 90°. Кроме того, знаменитый физик обосновал использование вращающего магнитного поля в многофазных системах.
Но в 1890 году инженер М.О. Доливо-Добровольский создаёт первый рабочий образец асинхронного электродвигателя с якорем «беличье колесо» и с обмоткой статора по периметру окружности. В конструкции этого изделия нашли применение, как работа Никола Теслы, так и труды других инженеров и изобретателей. Справедливости ради нужно отметить, что элементы по отдельности были изобретены раньше, М. Доливо-Добровольский только совместил их в работоспособное устройство.
Вращающее магнитное поле, энергию которого использует этот тип электромотора, возникает в тройной обмотке статора, при подключении его к источнику тока. Ротор такого двигателя представляет собой металлический цилиндр, не имеющий обмотки. Магнитное поле статора за счёт объединения в короткозамкнутую систему с ротором возбуждает в нем токи. Они вызывают создание собственного магнитного поля якоря, которое, соединившись с вихревым полем статора, вызывает вращение ротора и объединённого с ним вала двигателя вокруг своей оси.
Название асинхронный двигатель получил из-за того, что поля не синхронизированы, магнитное поле статора имеет одинаковую скорость с полем якоря, но по фазе отстаёт от него.
Для запуска асинхронного электромотора требуются довольно значительные значения пусковых токов, это заметно и в реальности – при запуске в сеть станка или другого потребителя с таким мотором свет ламп накаливания зачастую мигает из-за падения напряжения в сети. Для упрощения пуска используют фазный ротор, это устройство якоря обычно используется в высокопроизводительных электродвигателях. Фазный ротор, в отличие от обычного, имеет на корпусе три обмотки, объединённые в «звезду». В отличие от статора, они не подключены к энергоисточнику, а соединены со стартовым устройством. Подключение устройства в сеть характеризуется падением сопротивления до нулевых значений. В результате двигатель запускается ровно и работает без перегрузки. Работа такого мотора довольно сложно регулируется, в отличие от моторов постоянного тока.
Интересно. Использование электромоторов переменного тока продвигал знаменитый Никола Тесла, в то время как энергию постоянного тока – не менее знаменитый Эдисон. В результате этого между двумя известнейшими учёными возник конфликт, продлившийся до самой смерти.
Двигатель переменного тока
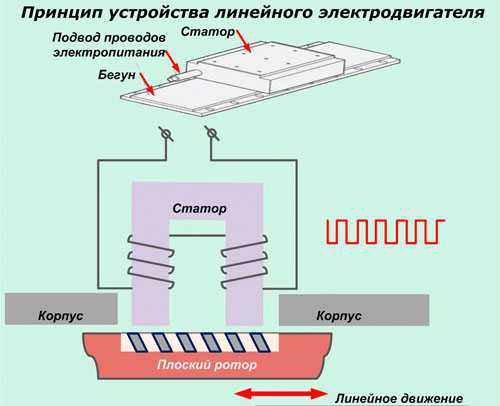
Линейные электродвигатели
Для ряда устройств требуется не вращательное движение вала движка, а его возвратно-поступательное движение. Для того чтобы удовлетворить требования промышленников, конструкторами были разработаны и линейные электродвигатели. Понятно, что можно использовать для перехода вращательного движения в поступательное различные редукторы и коробки передач, но это усложняет конструкцию, делает её более дорогой, а также снижает её эффективность.
Статор и ротор такого устройства представляют собой полосы металла, а не кольцо и цилиндр как в традиционных моторах. Принцип действия электродвигателя заключается в возвратно-поступательном движении ротора, которое возможно из-за электромагнитного поля, создаваемого статором с незамкнутой системой магнитопроводов. В самой конструкции при работе генерируется движущееся магнитное поле, которое воздействует на обмотку якоря с коллекторно-щеточным устройством. Возникающее поле смещает ротор только в линейном направлении, без придания ему вращения. Мощность электродвигателя линейного типа ограничена его устройством.
Недостатком этих двигателей являются: сложность их изготовления, достаточно высокая стоимость такого оборудования и низкая эффективность, хотя и выше чем использование вращения через редуктор.
Использование электромоторов переменного тока в однофазной сети
Получить вращающееся магнитное поле статора проще всего в трёхфазной сети, но, несмотря на то, можно использовать асинхронные движки и в однофазной, бытовой сети. Требуется лишь проведение некоторых расчетов и изменение конструкции двигателя.
Формула изменений такова:
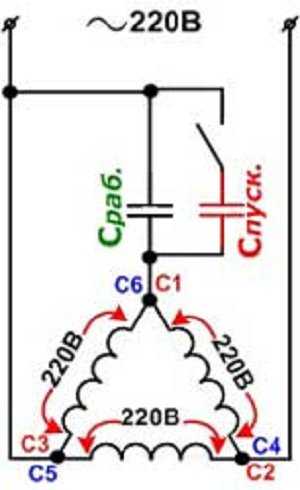
- Размещение на статоре движка двух обмоток: стартовой и рабочей;
- Включение в цепь конденсатора позволит сдвинуть по фазе ток в стартовой обмотке 90°. Практически можно сделать так: объединить обмотки трехфазного асинхронного двигателя, две обмотки в одну и установить конденсатор на это соединение.
Этот двигатель будет работать в бытовой сети, но, в отличие от двигателей постоянного тока, этот движок не регулируется по количеству оборотов, кроме того слабо переносит критические нагрузки и имеет меньший КПД. Мощность электродвигателя тоже сравнительно низка и во многом зависит от сети. Трехфазная сеть больше подходит для эксплуатации таких моторов.
В настоящее время электродвигатели широко распространены по всему миру. В числе их достоинств:
- высокое КПД, до 80%;
- высокая мощность двигателя при компактных размерах;
- неприхотливость в обслуживании;
- надежность;
- низкие требования к энергопитанию.
Но в тоже время существует ряд проблем, которые ограничивают их более широкое распространение. Так, например, их мобильность ограничивает источники питания – в настоящее время нет достаточно мощных источников питания, которые смогли бы обеспечить длительную функциональность такого устройства. Единственным исключением из правил является атомный реактор. Гребные электродвигатели подводных лодок и кораблей имеют отличную автономность, но в то же время использование энергоносителей таких размеров невозможно в быту. Ситуацию могли бы исправить графеновые аккумуляторы, но их перспективы пока туманны.
Электромобиль
Видео
Оцените статью:elquanta.ru
Электрический двигатель — принцип работы электромотора классификация и технические характеристики
Электрические двигатели предназначены для преобразования электрической энергии в механическую. Первые их прототипы были созданы в 19 веке, а сегодня эти устройства максимально интегрированы в жизнь современного человечества. Примеры их использования можно встретить в любой сфере жизнедеятельности: от общественного транспорта до домашней кофемолки.
Содержание:
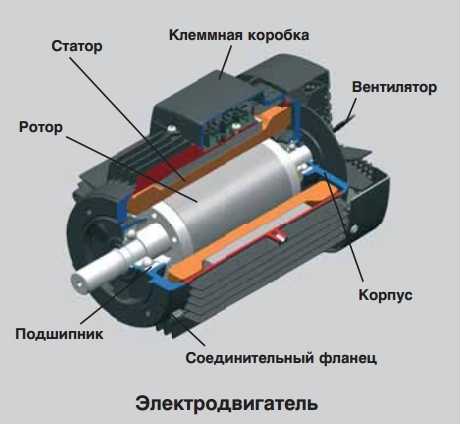
Электрический двигатель: вид в разрезе
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
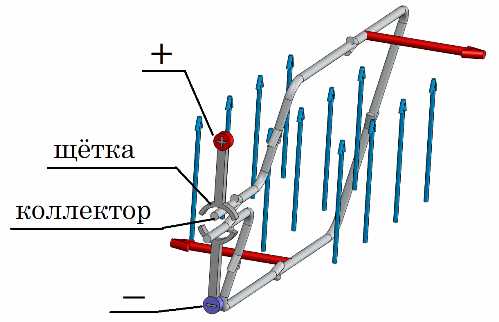
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Классификация электрических двигателей
Все электродвигатели между собой классифицируют в первую очередь по типу тока, протекающему через них. В свою очередь, каждая из этих групп тоже делить на несколько видов, в зависимости от технологических особенностей.
Двигатели постоянного тока
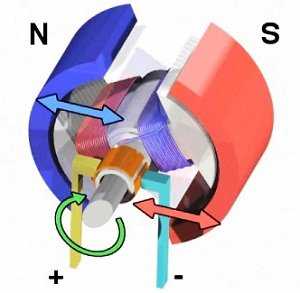
На маломощных двигателях постоянного тока магнитное поле создается постоянным магнитом, устанавливаемым в корпусе устройства, а обмотка якоря закрепляется на вращающемся валу. Принципиальная схема ДПТ выглядит следующим образом:
Обмотка, расположенная на сердечнике, изготавливается из ферромагнитных материалов и состоит из двух частей, последовательно соединенных между собой. Своими концами они подсоединяются к коллекторным пластинам, к которым прижимаются графитовые щетки. На одну из них подается положительный потенциал от источника постоянного тока, а на другую – отрицательный.
После подачи питания на двигатель происходит следующее:
- Ток от нижней «плюсовой» щетки подается на ту коллекторную пластину, к контактной платформе которой она подключена.
- Прохождение тока по обмотке на коллекторную пластину (обозначено пунктирной красной стрелкой), подключенную к верхней «отрицательной» щетке создает электромагнитное поле.
- Согласно правилу буравчика, в правой верхней части якоря возникает магнитное поле южного, а в левой нижней — северного магнитного полюса.
- Магнитные поля с одинаковым потенциалом отталкиваются друг от друга и приводят ротор во вращательное движение, обозначенное на схеме красной стрелкой.
- Устройство коллекторных пластин приводит к смене направления протекания тока по обмотке во время инерционного вращения, и рабочий цикл повторяется вновь.
Самый простой электрический двигатель
При очевидной простоте конструкции существенным недостатком таких двигателей является низкий КПД, обусловленный большими потерями энергии. Сегодня ДПТ с постоянными магнитами используются в простых бытовых приборах и детских игрушках.
Устройство двигателей постоянного тока большой мощности, используемых в производственных целях, не предусматривает использование постоянных магнитов (они занимали бы слишком много места). В этих машинах используется следующая конструкция:
- обмотка состоит из большего количества секций, представляющих собой металлический стержень;
- каждая обмотка отдельно подключается к положительному и отрицательному полюсу;
- количество контактных площадок на коллекторном устройстве соответствует количеству обмоток.
Таким образом, снижение потерь электроэнергии обеспечивается плавным подключением каждой обмотки к щеткам и источнику питания. На следующей картинке представлена конструкция якоря такого двигателя:
Устройство электрических двигателей постоянного тока позволяет легко обратить направление вращения ротора с помощью простой смены полярности на источнике питания.
Функциональные особенности электродвигателей определяются наличием некоторых «хитростей», к которым относится сдвиг токосъемных щеток и несколько схем подключения.
Сдвиг узла токосъемных щеток относительно вращения вала происходит после запуска двигателя и изменения подаваемой нагрузки. Это позволяет компенсировать «реакцию якоря» — эффект, снижающий эффективность машины за счет торможения вала.
Есть три способа подключения ДПТ:
- Схема с параллельным возбуждением предусматривает параллельное подключение независимой обмотки, как правило, регулируемой реостатом. Так обеспечивается максимальная стабильность скорости вращения и её плавная регулировка. Именно благодаря этому двигатели с параллельным возбуждением находят широкое применение в грузоподъемном оборудовании, на электрическом транспорте и станках.
- Схема с последовательным возбуждением тоже предусматривает использование дополнительной обмотки, но подключается она последовательно с основной. Это позволяет при необходимости резко увеличить крутящий момент двигателя, к примеру, на старте движения железнодорожного состава.
- Смешанная схема использует преимущества обоих способов подключения, описанных выше.
Биполярный электрический двигатель
Двигатели переменного тока
Главным отличием этих двигателей от описанных ранее моделей заключается в токе, протекающем по их обмотке. Он описывает по синусоидальному закону и постоянно меняет свое направление. Соответственно и питание этих двигателей осуществляется от генераторов со знакопеременной величиной.
Одним из главных конструктивных отличий является устройство статора, представляющего собой магнитопровод со специальными пазами для расположения витков обмотки.
Двигатели переменного тока классифицируют по принципу работы на синхронные и асинхронные. Коротко говоря, это означает, что в первых частота вращения ротора совпадает с частотой вращения магнитного поля в статоре, а во вторых – нет.
Настоятельно рекомендуем прочитать нашу статью об устройстве электродвигателей переменного тока.
Синхронные двигатели
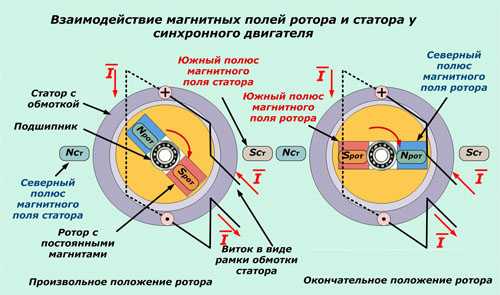
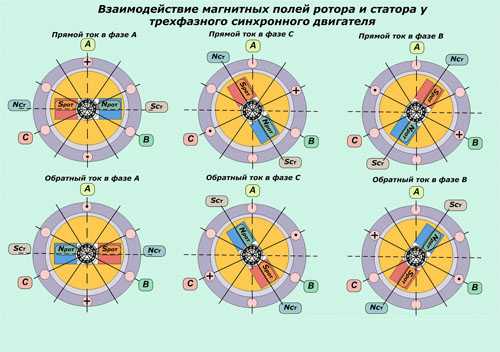
В основе работы синхронных электродвигателей переменного тока тоже лежит принцип взаимодействия полей, возникающих внутри устройства, однако в их конструкции постоянные магниты закрепляются на роторе, а по статору проводится обмотка. Принцип их действия демонстрирует следующая схема:
Проводники обмотки, по которой проходит ток, показанные на рисунке в виде рамки. Вращение ротора происходит следующим образом:
- На определенный момент времени ротор с закрепленным на нем постоянным магнитом находится в свободном вращении.
- На обмотке в момент прохождения через нее положительной полуволны формируется магнитное поле с диаметрально противоположными полюсами Sст и Nст. Оно показано на левой части приведенной схемы.
- Одноименные полюса постоянного магнита и магнитного поля статора отталкиваются друг от друга и приводят двигатель в положение, показанное на правой части схемы.
В реальных условиях для создания постоянного плавного вращения двигателя используется не одна катушка обмотки, а несколько. Они поочередно пропускают через себя ток, благодаря чему создается вращающееся магнитное поле.
Асинхронные двигатели
А асинхронном двигателе переменного тока вращающееся магнитное поле создается тремя (для сети 380 В) обмотками статора. Их подключение к источнику питания осуществляется через клеммную коробку, а охлаждение — вмонтированным в двигатель вентилятором.
Ротор, собранный из нескольких замкнутых между собой металлических стержней, жестко соединен с валом, составляя с ним одно целое. Именно из-за соединения стержней межу собой этот тип ротора называется короткозамкнутым. Благодаря отсутствию токопроводящих щеток в данной конструкции значительно упрощается техническое обслуживание двигателя, увеличивается срок службы и надежность. Главной причиной выхода из строя двигателей этого типа является износ подшипников вала.
Принцип работы асинхронного двигателя основывается на законе электромагнитной индукции – если частота вращения электромагнитного поля обмоток статора превышает частоту вращения ротора, в нем наводится электродвижущая сила. Это важно, поскольку при одинаковой частоте ЭДС не возникает и, соответственно, не возникает вращения. В действительности нагрузка на вал и сопротивление от трения подшипников всегда замедляет ротор и создает достаточные для работы условия.
Главным недостатком двигателей данного типа является невозможность получения постоянной частоты вращения вала. Дело в том, что рабочие характеристики устройства изменяются в зависимости от различных факторов. К примеру, без нагрузки на вал циркулярная пила вращается с максимальной скоростью. Когда мы подводим к пильному полотну доску и начинаем её резать, частота вращения диска заметно снижается. Соответственно, снижается и скорость вращения ротора относительно электромагнитного поля, что приводит к наведению еще большей ЭДС. Это увеличивает потребляемый ток и рабочая мощность мотора увеличивается до максимальной.
Принцип работы электрического мотора
Важно подбирать двигатель подходящей мощности – слишком низкая приведет к повреждению короткозамкнутого ротора из-за превышения расчетного максимума ЭДС, а слишком высокая приводит к необоснованным энергозатратам.
Асинхронные двигатели переменного тока рассчитаны на работу от трехфазной электрической сети, однако могут быть подключены и в однофазную сеть. Так, например, они используются в стиральных машинах и станках для домашних мастерских. Однофазный двигатель имеет примерно на 30% более низкую мощность, по сравнению с трехфазным – от 5 до 10 кВт.
Ввиду простоты исполнения и надежности асинхронные двигатели переменного тока наиболее распространены не только в производственном оборудовании, но и в бытовой технике.
Универсальные коллекторные двигатели
Во многих бытовых электроприборах необходимо наличие высокой скорости вращения двигателя и крутящего момента при малых пусковых токах и плавной регулировке. Всем этим требования удовлетворяют коллекторные двигатели, называемые универсальными. По своему устройству они очень похожи на двигатели постоянного тока с последовательным возбуждением.
Главным отличием от ДПТ является магнитная система, комплектуемая несколькими изолированными друг от друга листами электротехнической стали, к полюсам которых подсоединены по две секции обмотки. Такая конструкция снижает нагрев элементов токами Фуко и перемагничивание.
Высокая синхронность магнитных полей в универсальных коллекторных двигателях сохраняет высокую скорость вращения даже под большой нагрузкой на вал. Поэтому их используют в маломощном быстроходном оборудовании и домашней технике. При подключении в цепь регулируемого трансформатора появляется возможность плавной настройки частоты вращения.
Главный недостаток таких электромоторов заключается в низком моторесурсе, обусловленном быстрым стиранием графитовых щеток.
Это может быть интересно:tokidet.ru
Устройство и принцип работы электродвигателя переменного тока
Двигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Электрические двигатели: разновидности
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме. Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Двигатель коллекторного типа
Коллекторные двигатели
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример — помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Асинхронные двигатели
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.
Асинхронный двигатель
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят. Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Синхронные двигатели
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель — кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Как работают электрические двигатели
Асинхронные двигатели
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще — зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:

Работа двигателя переменного тока
- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.
- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов. Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.

Двигатель асинхронного типа
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели — генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности — увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
vashtehnik.ru
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
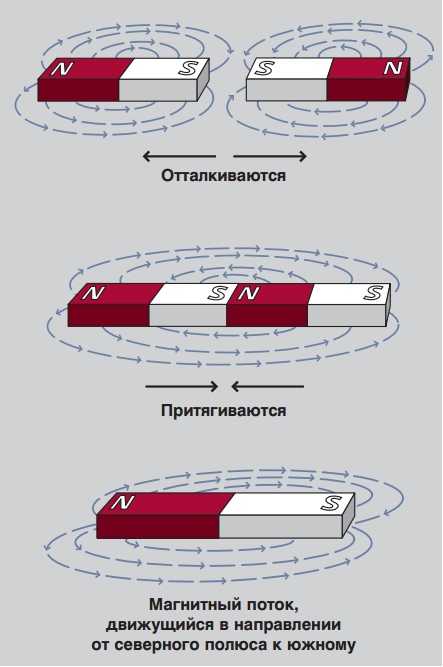
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.

Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
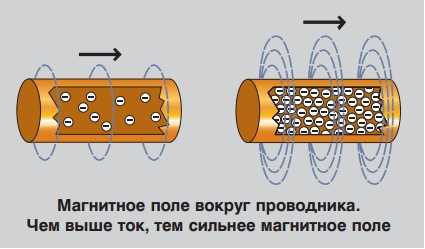
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
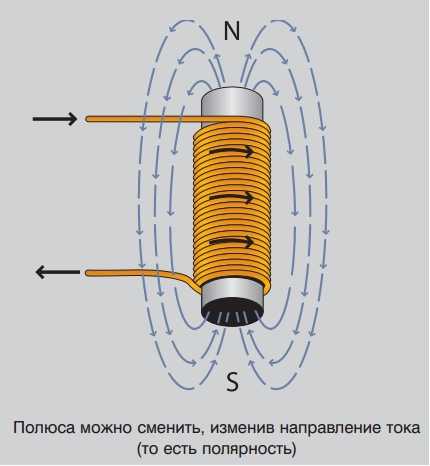
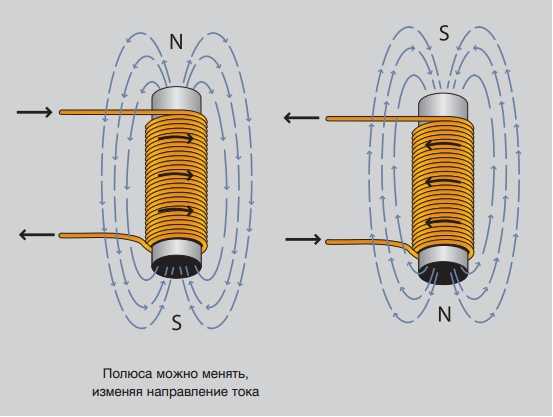
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
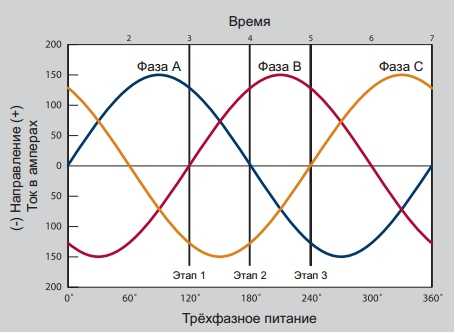
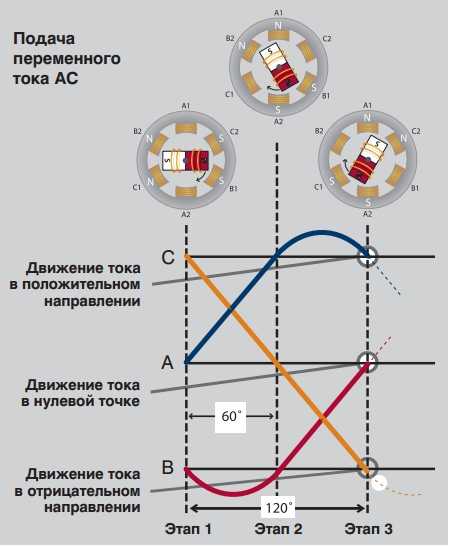
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
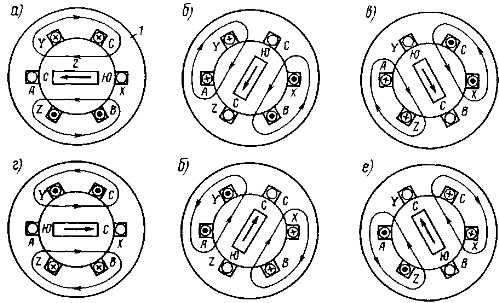
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

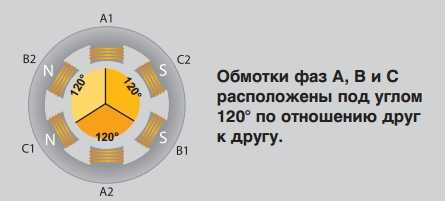
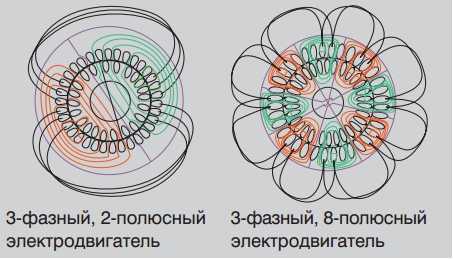
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
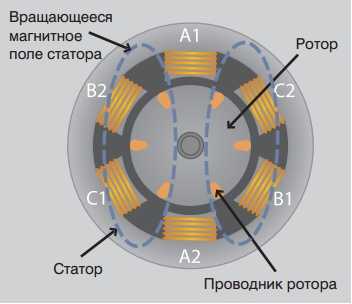
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Число полюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
2 | 3000 | 3600 |
4 | 1500 | 1800 |
6 | 1000 | 1200 |
8 | 750 | 900 |
12 | 500 | 600 |
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.

www.eti.su
