Создание левитатора
«Создание левитатора»
Мы живем в современном мире. Вокруг нас находятся предметы, так или иначе контактирующие друг с другом механически. Мы постоянно находимся в контакте с какими-либо объектами. И, с точки зрения физики, мы оказываем воздействие на них: захватываем, удерживаем, перемещаем в пространстве, изменяем форму, деформируем.
Проблема: Как мы знаем, контакт двух поверхностей сопровождается неизбежным трением. А трение является причиной потери части энергии, приложенной к предмету воздействия. В нашем современном мире стоит вопрос о поиске новых способов взаимодействия тел. При этом нужно стараться минимизировать механические потери энергии, и тем самым увеличивать КПД устройств.
Одним из ярких примеров решения проблемы является левитатор.
Прототипом левитатора можно назвать игрушку «Левитрон», состоящую из магнита в форме вращающегося волчка, который взлетает на несколько сантиметров над отталкивающим его магнитом
После изучения схемы и принципа работы этой игрушки, меня заинтересовал вопрос: можно ли заменить такие, казалось бы, привычные подшипники трения качения, а так же простые контактные методы перемещения предметов более совершенными? На помощь мне пришло магнитное поле и такое известное явление, как левитация, которое и используется в Левитроне. Левитация-это явление, при котором левитирующему объекту сообщается сила, позволяющая компенсировать силу тяжести.
Левитация-это явление, при котором левитирующему объекту сообщается сила, позволяющая компенсировать силу тяжести.
Актуальность: В современных механизмах основные элементы подвержены износу и требуют частой замены, то есть необходимы материальные затраты, поэтому использование левитатора дает большой спектр применения в различных направлениях: медицина, транспорт, энергомашиностроение, бестигельная плавка чистых металлов. При этом для левитатора присущи следующие важные преимущества: простота конструкции, способность работать в агрессивных средах и вакууме, а также при больших скоростях, возможность создания опор без трения.
Именно новизна этой технологии и возможности ее применения на практике обусловило выбор темы исследования: левитация и левитатор
Цель исследования: Объяснить с точки зрения физики явление левитации, создать свой собственный усовершенствованный левитатор.
Волчок-левитрон или магнитная левитация своими руками
Помните популярную игрушку из 90-х «Левитрон»? Это волчок, который висит в воздухе за счет магнитных сил. Попробуем сделать сами такую игрушку из подручных материалов и понаблюдаем за магнитной левитацией.
Попробуем сделать сами такую игрушку из подручных материалов и понаблюдаем за магнитной левитацией.
Нам потребуются следующие материалы:
- Деревянная доска, карандаш, изоляционная лента, пластиковые или латунные шайбы, почтовые бумажные, пластиковые или картонные открытки.
- Тринадцать дисковых неодимовых магнитов размерами 12*3 мм, марки N52; один широкий кольцевой размерами 20 (наружный диаметр) * 10 (внутренний диаметр) мм, марки N42.
Шаг 1: Раскладка
В игрушке «Левитрон», которая была популярна в 90-х годах, и которая больше не продается (или продается?), использовались два специальных керамических кольцевых магнита. Мы же с вами сделаем игрушку, используя несколько стандартных неодимовых магнитов.
Как сделать левитрон с подставкой своими руками? В первую очередь, распечатайте на принтере макет, изображенный выше. Он нужен для разметки отверстий под установку магнитов. Обязательно проверьте размеры с помощью линейки. Затем вырежьте макет по квадратной разметке.
Шаг 2: Вырезаем деревянное основание
Вырежьте деревянную заготовку такого же размера, как и бумажный макет. Вы можете использовать для изготовления основания любой пиломатериал, но его толщина должна быть не менее 6 мм.
Шаг 3: Переносим макет на основание
Далее приклейте бумажный макет к деревянному блоку. С помощью сверла Форстнера диаметром 12 мм накерните центр в каждом круге. Это необходимо для последующего точного сверления отверстий.
Шаг 4: Сверлим отверстия
Пришло время сверлить отверстия. Чтобы получились качественные отверстия с плоским дном, для сверления используйте сверло Форстнера диаметром 12 мм. Установите на сверлильном станке глубину сверления так, чтобы дно отверстия находилось чуть ниже верхней поверхности блока. Нужно, чтобы магниты располагались как можно ближе к поверхности.
Во время сверления макет должен оставаться наклеенным на деревянный блок, чтобы сверление было более точным.
Шаг 5: Устанавливаем магниты
Отверстия просверлены. Пора вставлять магниты. Они должны быть обращены одним из полюсов вверх. Установим их северным полюсом вниз. Чтобы определить, где северная, а где южная стороны, используйте маркированный магнит D68PC-RB или другой способ.
Пора вставлять магниты. Они должны быть обращены одним из полюсов вверх. Установим их северным полюсом вниз. Чтобы определить, где северная, а где южная стороны, используйте маркированный магнит D68PC-RB или другой способ.
Возьмите стопку марки N52 и вставьте по одному в каждое отверстие. Используйте что-нибудь для проталкивания их вглубь отверстий. Можете воспользоваться деревянным дюбелем.
Во время установки, поместите блок на стальную пластину, чтобы магниты удерживались на дне отверстий.
Убедитесь, что магниты располагаются как можно глубже в отверстиях Левитатора.
Шаг 6: Делаем волчок
Далее делаем волчок. Отрежьте карандаш длиной примерно 40 мм. У него должен быть заострен конец. Намотайте на карандаш изоленту, чтобы увеличить диаметр для установки внутрь кольцевого магнита.
Разместите кольцевой магнит на карандаше так, чтобы северный полюс был обращен вниз (в сторону острого конца карандаша). Для увеличения веса волчка, наденьте на него несколько пластмассовых шайб.
В последствии вам придется экспериментировать с весом и высотой центра тяжести волчка, чтобы он работал так, как надо. Для этого может потребоваться очень много времени.
Шаг 7: Тестируем
Отрежьте кусок пластика или картона, чтобы сделать платформу. Платформа укладывается поверх основания с магнитами. Волчок раскручивается на этой платформе, затем платформа с волчком поднимается, чтобы волчок попал в «магнитную яму».
Если вы сможете заставить волчок висеть, то вам крупно повезло. Чтобы волчок работал как следует, вам, возможно, придется потратить на это уйму времени.
Вот несколько советов, как можно отрегулировать работу устройства. Во-первых, нужно сбалансировать основание. Используйте картонные открытки или листки бумаги для заметок, чтобы поднять стороны основания и выровнять его.
Если волчок продолжает отклоняться в одну сторону, вам нужно будет поднять эту сторону. Здесь лучше использовать трехточечную систему нивелирования.
Вес волчка также является ключевым фактором. В устройстве есть некая «яма», то есть зона, магнитное поле в центре которой немного слабее, чем у краев. Чтобы волчок оставался в этой яме, вам нужно либо добавить ему вес, либо снизить его.
В устройстве есть некая «яма», то есть зона, магнитное поле в центре которой немного слабее, чем у краев. Чтобы волчок оставался в этой яме, вам нужно либо добавить ему вес, либо снизить его.
Если волчок сразу вылетает, то вам, вероятно, нужно добавить ему веса. Если волчок не отрывается от платформы, возможно, он слишком тяжелый.
Также нужно убедиться, что высота платформы выбрана правильно. Если волчок плохо вращается, попробуйте подложить бумажки или картонки под платформу.
Посмотрите видео, чтобы узнать, как это работает!
Шаг 8: Печать на 3D-принтере
Если у вас есть 3D-принтер, то распечатайте игрушку на нем. Вот ссылка на файлы в ThingiVerse.
Если желаете, можете прочитать статью о том, как работает левитирующий волчок.
Вязкое сопротивление жидкости заставило магнитную «блоху» левитировать
K. Baldwin et al. / Phys. Rev. Lett.
Baldwin et al. / Phys. Rev. Lett.
Физики из Германии и Британии открыли новый эффект в магнитных мешалках — оказывается, перемешивающая жидкость «блоха» левитирует в жидкости, если ее вязкость превышает определенное значение. Ученые не только экспериментально определили вязкость, частоту вращения и высоту стакана, при которой «блоха» начинает левитировать, но и объяснили наблюдаемое явление теоретически. Статья опубликована в Physical Review Letters, кратко о ней сообщает Physics, препринт работы выложен на сайте arXiv.org.
Магнитная мешалка была изобретена в 1942 году и с тех пор ее конструкция практически не изменилась. В самой простой форме это устройство состоит из двух цилиндрических постоянных магнитов, находящихся в параллельных плоскостях и ориентированных так, чтобы южный полюс одного из магнитов совпадал с северным полюсом второго магнита (и наоборот).
Тем не менее, даже такие простые и, казалось бы, хорошо изученные устройства могут иногда повести себя совершенно неожиданно. Пример такого неожиданного поведения открыла и изучила группа ученых под руководством Дэвида Фэрхерста (David Fairhurst) — однажды, смешивая в магнитной мешалке полимер и воду, Фэрхерст заметил, что «блоха» левитирует в центре стакана вместо того, чтобы вращаться около его дна. Затем физики изучили это случайное открытие более пристально — наливали в стакан жидкости с различной вязкостью, приподнимали его над нижним магнитом и увеличивали скорость вращения — а потом построили численную модель и объяснили наблюдаемые процессы теоретически.
Схема «магнитной мешалки», которую ученые использовали в эксперименте
K. Baldwin et al. / Phys. Rev. Lett.
В результате ученые обнаружили, что поведение мешалки описывается одним из трех сценариев. Во-первых, если вязкость жидкости сравнительно невелика (η < 0,4 паскалей на секунду) — например, если в стакан налита вода, — то «блоха» хаотически движется и прыгает, как в классических экспериментах, в честь которых она получила свое название. Во-вторых, в более вязких жидкостях (η > 0,4 паскалей на секунду) «блоха» теряет энергию из-за трения и отстает от нижнего магнита, то есть скорость ее вращения ω Если точнее, угол поворота «блохи» подчиняется эмпирическому закону θ = ωst + Asin(ωwt), где A — амплитуда «подрагиваний». При увеличении частоты ωd частота вращения «блохи» и амплитуда «подрагиваний» уменьшается, а частота ωw растет (более точная зависимость приведена на графике). Наконец, если стакан с вязкой жидкостью (η > 0,4 паскалей на секунду) пододвинуть к нижнему магниту на расстояние z < 4 сантиметров, «блоха» останется подвешенной в толще жидкости вместо того, чтобы упасть на дно стакана. Правда, для этого скорость вращения электромотора не должна опускаться ниже 63 радиан в секунду — иначе частота «подрагиваний» сравнивается с основной частотой вращения «блохи», и она падает на дно стакана.
Если точнее, угол поворота «блохи» подчиняется эмпирическому закону θ = ωst + Asin(ωwt), где A — амплитуда «подрагиваний». При увеличении частоты ωd частота вращения «блохи» и амплитуда «подрагиваний» уменьшается, а частота ωw растет (более точная зависимость приведена на графике). Наконец, если стакан с вязкой жидкостью (η > 0,4 паскалей на секунду) пододвинуть к нижнему магниту на расстояние z < 4 сантиметров, «блоха» останется подвешенной в толще жидкости вместо того, чтобы упасть на дно стакана. Правда, для этого скорость вращения электромотора не должна опускаться ниже 63 радиан в секунду — иначе частота «подрагиваний» сравнивается с основной частотой вращения «блохи», и она падает на дно стакана.
Зависимость частоты вращения «блохи» (круги), частоты «подрагиваний» (треугольники) и амплитуды «подрагиваний» (квадраты) от частоты вращения электромотора
K. Baldwin et al. / Phys. Rev. Lett.
Baldwin et al. / Phys. Rev. Lett.
Чтобы объяснить левитацию «блохи», ученые построили простую теоретическую модель, которая описывает вертикальные силы, действующие на цилиндр. Эта модель показывает, что основная причина, по которой «блоха» остается подвешенной в жидкости — отставание ее вращения от вращения нижнего магнита, из-за которого одноименные полюса магнитов время от времени оказываются друг над другом. Рассчитанные с помощью этой модели положения «блохи» совпадают с результатами эксперимента, что указывает на ее правдоподобность.
Зависимость средней высоты «блохи» от частоты вращения электромотора: серые точки отвечают случаю неконтролируемого «выскакивания», пустые точки — случаю вращения на дне, цветные точки — левитации. Сплошная черная линия — теоретически рассчитанная зависимость высоты левитирующей «блохи»
K. Baldwin et al. / Phys. Rev. Lett.
Baldwin et al. / Phys. Rev. Lett.
Тем не менее, модель также предсказывает, что «блоха» будет дестабилизироваться и выскакивать из положения равновесия из-за колебаний в горизонтальной плоскости. Чтобы объяснить, почему такая дестабилизация не происходит, физики численно смоделировали поведение жидкости, обтекающей вращающийся цилиндр. Оказалось, что «блоха» удерживается около оси стакана благодаря «подрагиваниям», которые на первый взгляд казались побочным эффектом, — они «откачивают» вязкую жидкость из центра цилиндра и создают центростремительную силу, которая стабилизирует его вращение. Напротив, в менее вязких жидкостях потоки направлены к цилиндру — это выводит «блоху» из равновесия и заставляет ее выскакивать из положения равновесия.
Численно рассчитанные направления потоков воды вокруг «блохи», которые вызываются «искусственными подрагиваниями» ее концов в плоскости, перпендикулярной плоскости рисунка
K. Baldwin et al. / Phys. Rev. Lett.
Baldwin et al. / Phys. Rev. Lett.
Численно рассчитанные направления потоков воды вокруг «блохи» для различных чисел Рейнольдса
K. Baldwin et al. / Phys. Rev. Lett.
Теорема Ирншоу утверждает, что подвесить намагниченные частицы в статическом магнитном поле, не прибегая к внешним силам, невозможно. Именно поэтому авторам статьи пришлось закручивать частицы и стабилизировать их с помощью силы вязкости. Тем не менее, магнитная левитация — это не единственный способ заставить объекты парить в воздухе; в частности, в последнее время физики и инженеры активно разрабатывают акустические левитаторы, которые удерживают небольшие объекты с помощью звуковых волн. Так, в 2015 году исследователям впервые удалось подвесить с помощью направленного луча пластмассовый шарик диаметром около четырех миллиметров, в 2016 году они увеличили диаметр шарика до пяти сантиметров, а в 2018 году научились передвигать его в пространстве. Более того, акустические левитаторы уже находят практические применения — с их помощью можно переносить еду по воздуху, спаивать детали микросхем и создавать объемные изображения, напоминающие «голограммы» из «Звездных войн» или других научно-фантастических фильмов.
Более того, акустические левитаторы уже находят практические применения — с их помощью можно переносить еду по воздуху, спаивать детали микросхем и создавать объемные изображения, напоминающие «голограммы» из «Звездных войн» или других научно-фантастических фильмов.
Дмитрий Трунин
Магнитный левитрон (реально рабочая схема)
Магнитное поле допускает создание устройства с реальной левитацией, которая вызвана невидимой для глаза силой электромагнитного поля. Явление магнитной левитации состоит в том, что металлический объект плавает в пространстве. Человек, наблюдающий левитацию, понимает что между объектом и электромагнитом ничего нет.
Схема простого магнитного левитрона
В простейшем случае схема выглядит так:
- Электромагнит — намотан на винт около 800 витков провода 0,5 мм.

- Лазерная указка обычная 5 мВт
- Блок питания трансформатор 50 Вт 12 В
- Выпрямительный мост 10 А

Что касается объекта, на него действуют две силы: первая — это сила создаваемая гравитацией земли, вторая — из магнитного поля созданного электромагнитом. Обе силы будут направлены друг на друга.
Теоретически, достаточно регулировать ток протекающий через электромагнит, чтобы создать постоянное магнитное поле которое будет генерировать силу, равную силе гравитации. Там будет некая точка в пространстве где металлический объект будет подниматься в воздух. На практике это невозможно, потому что даже минимальное нарушение этого состояния может привести к падению или притяжению объекта электромагнитом, поэтому необходимо установить соответствующий контроллер, который будет отвечать за управление электромагнитом.
Схема улучшенного магнитного левитрона
Вот ещё одна модель левитрона, то есть системы, используемой для наблюдения явления магнитной левитации.
Схема и электронная часть изменена и адаптирована. Вся система состоит из 4 плат, на одной собственно блок питания, то есть выпрямительный мост 6 А — этого достаточно, хотя он немного нагревается, фильтрующий конденсатор и стабилизатор 7805. На второй плате датчики света и фоторезисторы. На третьей плате, подключенной к электромагниту, установлен диод для защиты от скачков напряжения возникающих в электромагните и светодиод, для визуализации протекающих токов. Последняя имеет выключатель и светодиоды рабочего состояния. Платы соединены соответствующими проводами. Везде использовались разъемы Goldpin или подобные. Вот печатные платы:
Лазер, точнее лазерный диод, удален от индикатора на несколько сантиметров вместе с системой защиты. Размещенные на подвижном вверх-вниз кронштейне, позволяющем установить высоту барьера, фотоэлементы также регулируются. Электромагнит — винт M10x90 мм, медный провод 0,9 мм толщиной и длинной 130 м. Электромагнит имеет около 1500 витков в 19 слоях, сопротивление чуть более 4 Ома, длина его 75 мм и диаметр 50 мм. Боковые кольца вырезаны из оргстекла.
Боковые кольца вырезаны из оргстекла.
Механическая конструкция
Прибор был сделан из оргстекла, сначала он должен был быть алюминиевым, но так дешевле и как оказалось это удобный материал для обработки. Элементы которые должны были быть закруглены, после нагревания зажигалкой могли быть согнуты под углом 90 градусов.
Схема начала работать правильно с первого запуска. После регулировки напряжения на обоих фоторезисторах потенциометрами всё стала полностью устойчивым к внешним условиям освещения. Во время работы через соленоидные катушки максимально протекает ток около 2 А, это вызывает довольно высокий нагрев BD911, но например с помощью BUZ90 или 6N60 можно уменьшить нагрев, ведь их сопротивление включенное невелико. На испытании через час обнаружили, что температура радиатора не превышает 90 градусов, поэтому достаточно пассивного охлаждения, мостовой выпрямитель и 7805 также немного нагреваются, у них есть небольшие радиаторы. Единственный недостаток, который появился после долгой работы устройства это то, что дешевые лазеры после получаса непрерывного освещения теряют интенсивность света.
Единственный недостаток, который появился после долгой работы устройства это то, что дешевые лазеры после получаса непрерывного освещения теряют интенсивность света.
В принципе левитрон подходит для непрерывной работы, правильно держит мелкие и крупные объекты, сила электромагнита действительно высока, если установить большой винт напротив него и притянуть — его будет трудно снять. Даже удалось поднять большой подшипник весом почти 0,3 кг, он левитировал примерно в пол сантиметрах от магнита. В общем смело делайте устройство — схема реально рабочая!
многофункциональный робот для дистанционного изучения закрытых территорий — Конференция 63 МФТИ
Цель работы
А вы задумывались, насколько опасно проводить какие-либо исследования в пещерах? Пещер много, но всех их объединяет одно — опасности, которые подстерегают человека там. Их можно разделить на: опасности природного характера и опасности, связанные с человеческим фактором. Более опасными из них являются: Обвалы и камнепады, загазованность пещер, этой неприятностью обладают все пещеры.
Цель исследования: создать робота для исследования пещер и работы на поверхности различных планет.
 Есть также опасности связанные с водой и температурой в пещере. Темнота тоже немаловажный фактор, без света любое передвижение превращается в настоящую муку и может привести к печальным последствиям. Эту проблему можно решить путем создания маленького робота-исследователя.
Есть также опасности связанные с водой и температурой в пещере. Темнота тоже немаловажный фактор, без света любое передвижение превращается в настоящую муку и может привести к печальным последствиям. Эту проблему можно решить путем создания маленького робота-исследователя.Обзор предметной области
В современном мире не существует совершенных систем управления и автоматизации какими-либо процессами, а так же устройств, которые способны выполнять разнородные задачи. Проанализировав уровень развития современной робототехники, я сделала вывод о том, что в настоящий момент не существует роботов, адаптированных для решения нестандартных задач при исследовании окружающей среды. В итоге, было принято решение попытаться разработать собственного робота с индивидуальной конструкцией, который способен не только исследовать территорию, но и мог бы общаться с пользователем.
 При этом он должен собирать образцы магнитных материалов бесконтактным методом (левитация). Так же его можно использовать для автоматизированного перемещения на предприятиях хрупких объектов.
При этом он должен собирать образцы магнитных материалов бесконтактным методом (левитация). Так же его можно использовать для автоматизированного перемещения на предприятиях хрупких объектов.Описание результатов проекта
В ходе представленной работы изготовлена и исследована основная схема управления роботом. Мы создали робота – исследователя
Был собран и протестирован первый вариант робота. На основании полученных в результате измерений данных, были сделан вывод об эффективности робота, намечен ход развития проекта.
После проведения экспериментов был усовершенствована модель робота:
• Добавлена камера
• Разработана принципиально новая электрическая схема управления роботом, с использованием двух микроконтроллеров для левитатора и камеры один, а для управления датчиками, экраном и двигателем другой.
В результате работы я создала робота для исследования пещер и других поверхностей планет. Также он может перевозить хрупкие детали при помощи левитатора, который был создан мной в предыдущем проекте.
Исходя из выше изложенного, я могу сказать, что цели, поставленные мной, были достигнуты, а задачи решены. Гипотеза, выдвинутая мной: Если найти принципиально новое схемотехническое решение, то можно добиться увеличения функционала робота и эффективности его работы с расширением возможностей, получила полное подтверждение.
Разработанное устройство может быть использовано как прототип заводского робота, которого можно повсеместно применять в промышленности или как робота исследователя, которого можно посылать в труднодоступные места, так как он оснащен необходимыми для этого датчиками.
Планировалось использовать левитатор, как подвеску для робота, чтобы минимизировать трение между деталями робота. Многие научные открытия получаются путем проведения анализа и проведения эмпирических исследований. Именно на этом принципе я хочу продолжить свою работу.
 Это, несомненно, говорит об успешном выполнении работы.
Это, несомненно, говорит об успешном выполнении работы.Описание применимости
В дальнейшем планируем доработать робот, использовать левитатор в качестве электромагнитной подвески для робота.
Также мы хотим перевести робот на аккумуляторные батареи и добавить в робота солнечную батарею, с целью подзарядки аккумуляторных элементов питания при помощи солнечного света. Установить bluetooth модуль, для удаленного управления роботом. В дальнейшем мы усовершенствуем камеру робота, информация с камеры будет передаваться и сохранятся на флеш-карте, с целью дальнейшего просмотра и анализа получаемых данных
 Для этого необходимо использовать наш левитатор в качестве управляемых амортизаторов. Что весьма необходимо при движении на различных неровностях при значительной скорости передвижения. Также, с целью расширения применяемости робота, планируется ввести в работу датчики газа, дыма, движения. Изменить алгоритм работы Робота, в зависимости от соответствующих сигналов, поступаемых с этих датчиков.
Для этого необходимо использовать наш левитатор в качестве управляемых амортизаторов. Что весьма необходимо при движении на различных неровностях при значительной скорости передвижения. Также, с целью расширения применяемости робота, планируется ввести в работу датчики газа, дыма, движения. Изменить алгоритм работы Робота, в зависимости от соответствующих сигналов, поступаемых с этих датчиков.Функционал:
1)съемка видео
2)запись звука
3)измерение давления
4) измерение темперетуры
5) транспортировка хрупких дталей
6) построение графиков изменения температуры, давления, напряжения
7) измерение угла наклона
8) преодоление препятсвий
9)режим энергосбережения
10) расширенная подвеска (на электромагнитах )
Как сделать левитрон на датчике холла своими руками
Левитрон на датчике холла
Левитроном, как известно, называют волчок, вращающийся в воздухе над коробкой, в которой действует источник магнитного поля. Изготовить левитрон можно из популярного датчика холла.
Изготовить левитрон можно из популярного датчика холла.
Что такое левитрон
Левитрон – это игрушка. Ее нет никакого смысла покупать, если знать варианты изготовления самодельного устройства. Ничего сложного в конструкции такого левитрона не будет, если имеется обычный датчик холла, например, купленный для автомобильного трамблера, и оставленный впрок.
Графическая схема функционирования датчика
Следует знать, что эффект левитации наблюдается всегда в достаточно узкой зоне. Такие реалии несколько ограничивают свободу действий умельцев, однако при приложении терпения и времени, можно всегда настроить левитрон качественно и эффективно. Он практически не будет падать или скакать.
Левитрон из датчика холла
Левитрон на датчик холла и идея его изготовления проста, как и все гениальное. Благодаря силе магнитного поля в воздух поднимается кусок любого материала с электромагнитными свойствами.
Левитатор
Чтобы создался эффект «зависания», парения в воздухе, подключение осуществляется с большой частотой. Другими словами, магнитное поле, как бы, поднимает и бросает материал.
Другими словами, магнитное поле, как бы, поднимает и бросает материал.
Схема устройства чересчур проста, и даже школьник, не просидевший уроки физики зря, сможет все самостоятельно соорудить.
- Нужен светодиод (цвет его подбирается в зависимости от индивидуальных предпочтений).
- Транзисторы RFZ 44N (хотя подойдет любой полевик, близкий к этим параметрам).
- Диод 1N 4007.
- Резисторы на 1 кОм и 330 Ом.
- Собственно, сам датчик холла (А3144 или другой).
- Медный намоточный провод размером 0,3-0,4 мм (около 20 метров будет достаточно).
- Неодимовый магнитик в виде таблетки 5х1 мм.
- 5-вольтный зарядочник, предназначенный для мобильника.
Теперь подробно о том, как проводится сборка:
- Делается каркас для электромагнита точно с такими же параметрами, как на фото. 6 мм – диаметр, около 23 мм – длина намотки, 25 мм – диаметр щечек с запасом. Изготавливается каркас из картонки и обычного тетрадного листа, с использованием суперклея.

Каркас для электромагнита
- Конец медного провода фиксируется на катушке, а затем проводится наматывание (примерно 550 витков). Неважно при этом в какую сторону наматывать. Другой конец провода тоже закрепляется, катушка пока откладывается в сторону.
- Паяем все по схеме.
Схема левитрон на ДХ
- Датчик холла припаивается на проводки, а затем ставится на катушку. Надо вдеть его внутрь катушки, зафиксировать подручными средствами.
Внимание. Чувствительная зона датчика (определить ее можно по документации к датчику холла) должна смотреть параллельно земле. Поэтому, перед тем как вдеть датчик в катушку, рекомендуется немного согнуть это место.
Датчик холла на катушку
- Катушка подвешивается, на нее подается питание через спаянную ранее плату. Катушка фиксируется посредством штатива.
Закрепленная в штатив катушка
Теперь можно проверить, как работает левитрон. Можно подвести к катушке снизу любой наэлектризованный материал. Он будет либо притягиваться катушкой, либо отталкиваться, в зависимости от полярности. Но нам нужно, чтобы материал зависал в воздухе, парил. Так оно и будет, если форма материала не слишком мала по отношению к катушке.
Он будет либо притягиваться катушкой, либо отталкиваться, в зависимости от полярности. Но нам нужно, чтобы материал зависал в воздухе, парил. Так оно и будет, если форма материала не слишком мала по отношению к катушке.
Примечание. Если магнит в виде таблетки маленький, то он будет левитировать не слишком эффектно. Может падать. Чтобы исключить огрехи в работе, надо сместить центр тяжести материала к низу – в качестве груза подойдет обычный кусок бумажки.
Что касается светодиода, то его можно и не ставить. С другой стороны, если хочется большего эффекта, можно организовать шоу с подсветкой.
Самодельный левитрон в классическом исполнении без датчика
Как видим, благодаря наличию датчика холла удалось изготовить вполне эффектную игрушку. Однако это вовсе не означает, что без датчика не обходится. Напротив, самодельный левитрон в классическом исполнении, это лишь большой магнит от динамика (диаметром 13-15 см) и маленький кольцевой магнит для волчка (2-3 см в диаметре), без использования датчика.
Ось волчка делается, как правило, из старой ручки или карандаша. Главное – стержень подбирается так, чтобы плотно заходил по центру кольцевого магнита. Лишняя часть ручки после этого срезается (примерно 10 см в длину вместе с закрепленным магнитом для волчка, то что надо).
Классическая схема изготовления левитрона подразумевает также наличие десятка различных шайб, вырезанных из плотной бумаги. Для чего они понадобятся? Если в вышеописанном случае тоже использовалась бумага, и как мы помним – для смещения центра тяжести вниз или проще, для настройки. То же самое и здесь. Шайбочки буду нужны для идеальной настройки волчка (при необходимости сажаются после кольцевого магнита на стержень).
Вырезание шайб из бумаги
Внимание. Чтобы самодельный волчок идеально левитировал, помимо настройки шайбочками, нужно не ошибиться с полярностью. Другими словами, установить кольцевой магнит соосно большому магниту.
Левитация волчка над большим магнитом
Но и это еще не все. Как в первом случае (с использованием датчика холла), так и во втором, надо добиться идеальной ровности источника притяжения. Говоря иначе, поставить большой магнит на идеально ровную поверхность. Чтобы добиться этого, применяются деревянные подставки различной толщины. Если магнит сидит не ровно, подставки ставятся с одной стороны или с нескольких, таким образом, настраивается ровность.
Как в первом случае (с использованием датчика холла), так и во втором, надо добиться идеальной ровности источника притяжения. Говоря иначе, поставить большой магнит на идеально ровную поверхность. Чтобы добиться этого, применяются деревянные подставки различной толщины. Если магнит сидит не ровно, подставки ставятся с одной стороны или с нескольких, таким образом, настраивается ровность.
Платформенные левитроны
Отличается платформенная схема левитрона, как правило, наличием не одного, а нескольких магнитов-источников. Парящий в воздухе материал или волчок будет стремиться в этом случае упасть на один из магнитов, сместившись с вертикальной оси. Чтобы этого избежать, надо суметь скорректировать центральную зону притяжения, и сделать это идеально точно.
И тут на помощь приходят те самые катушки, с вдетым внутрь датчиком холла. Пусть таких катушек будет две, и расположить их следует ровно по середине платформы, между магнитами. На схеме это будет выглядеть вот так (1 и 2 — магниты).
Схема платформенного левитрона
Из схемы становится понятно, что целью управления катушками является создание горизонтальной силы, центра притяжения. Сила эта формально названа Fss, и направлена она к оси равновесия при возникновении смещения, указанного на схеме, как Х.
Если подключить катушки так, чтобы импульс создавал зону с обратной полярностью, то можно решить вопрос со смещением. Это подтвердит любой физик.
В качестве корпуса для конструкции платформенного левитрона подбирается любой старый проигрыватель ДВД. Из него снимаются все «внутренности», устанавливаются магниты и катушки, а в целях красоты, верхняя часть закрывается практичной крышкой из тонкого, можно прозрачного материала (пропускающего магнитное поле).
Датчики холла должны выступать через отверстия платформы, должны быть распаяны на разогнутых ножках разъемов.
Что касается магнитов, то это могут быть круглые элементы толщиной в 4 мм. Желательно, чтобы один из магнитов был больше второго по диаметру. Например, 25 и 30 мм.
Например, 25 и 30 мм.
Существуют и более сложные варианты левитронов, изготовленные по схеме раскручивания волчка, находящегося внутри небольшого глобуса. Эти левитроны также могут строиться с использованием датчиков холла – эффективных составляющих, совершивших целую революцию в автопромышленности и других сферах человеческой деятельности.
Левитрон на датчике холла | Домострой
Левитрон
Довольно давно мне на глаза попалось видео, в котором демонстрировалось замечательное устройство — левитрон. Вариантов уйма. К сожалению, для изготовления левитрона на постоянных магнитах мне не удалось найти подходящих магнитов и, после нескольких неудачных попыток, данный проект был заброшен.
Недавно я вспомнил про левитрон и решил чуть больше про него почитать/посмотреть. Нашёл инструкцию изготовления левитрона на электромагните. Вроде выглядела она не сильно сложно, и я решился повторить её.
С большим трудом нашёл подходящий датчик Холла у нас в городе. Сначала опробовал датчики из DVD/CD — они совсем мелкие и жутко хрупкие. Так ничего и не получилось с ними. Потом добрые люди из «Банды технарей» в Г+ подсказали про наличие подобных датчиков в ноутбуках. В своём старом нерабочем ноуте найти датчик не удалось (видимо, плохо искал). Зато удалось парочку таких датчиков найти у ремонтников из местной «Формозы». Правда, с ними тоже ничего не получилось в силу всё тех же причин (мелкие, хрупкие, к тому же один оказался нерабочим). В конце концов в радиомагазине на другом конце города нашёл датчики Холла Ah54E, с которыми всё получилось как надо.
Первая версия была собрана на готовой плате с отверстиями и выглядела ужасно (зелёная платка на фото):
К счастью, всё получилось и устройство заработало:
Но внешний вид меня не очень устроил, да и полученный опыт ЛУТа не давал покоя. Поэтому решено было сделать печатную плату под левитрон. Сказано — сделано. Спустя всего около 4-х часов работы удалось сделать вторую версию левитрона, которую уже не стыдно в школе детям показать. Вот так выглядят первая и вторая версия основы левитрона:
Вот так выглядят первая и вторая версия основы левитрона:
Вот так выглядит работающая вторая версия левитрона:
А когда мне удалось раздобыть лёгкую батарейку на 3 вольта, получилась вообще красота:
На всякий случай небольшое пояснение. Работает левитрон очень просто: берётся небольшой ниодимовый магнит и подносится к катушке левитрона снизу так, чтобы он притягивался к катушке (если отталкивается — переверните магнит). При этом, когда магнит притягивается очень близко к катушке, должен погаснуть светодиод, тем самым показав, что сработал датчик Холла и катушка отключилась. Если при приближении магнита вплотную к катушке ничего не происходит, то надо поменять полярность подключения катушки и перевернуть магнит. В результате должно получиться такое: 1) катушка притягивает магнит, 2) магнит поднимается, 3) при чрезмерном приближении к катушке срабатывает датчик и отключает её, 4) магнит начинает падать, датчик перестаёт «чувствовать» магнит и снова включается катушка. Быстрое повторение 1-4 пунктов и позволяет магниту висеть под катушкой.
Быстрое повторение 1-4 пунктов и позволяет магниту висеть под катушкой.
Только надо подвешивать магнит аккуратно. Если он будет дёргаться, то постепенно раскачается до такой степени, что просто упадёт!
Особенно прикольно смотрится горящий светодиод (см. последнее видео). Надо взять лёгкую батарейку на 3V, примагнитеть её к нашему магниту, плилепить туда же светодиод так, чтобы он горел, и всё это подвесить под катушкой.
Рисунок платы можно взять здесь. R1 = 1кОм, R2 = 100-300 Ом (в оригинальной инструкции 280 Ом, у меня и с 100 Ом работает). Транзистор: IRF740. Диод: N4007. Катушка: Ø0.355, примерно 150-170 грамм (купил в магазине и даже перематывать не стал, т.к. она не сильно отличается от параметров из оригинальной инструкции). Датчик Холла: Ah54E или аналогичный. Светодиод любой.
Левитрон позволяет осуществлять магнитную подвеску объектов с небольшим весом путем управления магнитным полем, создаваемым катушкой L1. Обратная связь происходит с помощью датчика Холла, выпаянного со старого 3,5″ дисковода (от дискет). Под воздействием внешнего магнитного поля на клеммах H+ и H- возникает разность потенциалов в зависимости от направления поля и его положения.
Под воздействием внешнего магнитного поля на клеммах H+ и H- возникает разность потенциалов в зависимости от направления поля и его положения.
Схема электрическая левитрона с датчиком Холла
Датчики Холла такого типа довольно низкого качества, но их вполне достаточно для этого применения. Некоторые используют дорогие ратиометрические датчики, но они дороги и довольно труднодоступны. Датчик, который использован тут, является линейным устройством, но его легко спутать с цифровыми, что также часто стоят на дисководах. Чтобы избежать ошибки, проверьте его с помощью обычного мультиметра или осциллографа.
Катушка левитрона представляет собой спиральную проволоку диаметром 0,4 мм на сердечнике — винт с поперечным сечением около 1 см кв. и длиной около 5 см. Под ним установлен датчик. Хорошей идеей является защита его пластиком, который не был бы поврежден неодимовым магнитом, если его случайно ударить об сердечник катушки. Объект, подвешенный под катушкой, должен быть снабжен неодимовым магнитом. Например цилиндрический магнит с поперечным сечением 15 мм и длиной 20 мм.
Например цилиндрический магнит с поперечным сечением 15 мм и длиной 20 мм.
Для правильной работы устройства полярность катушки и магнита должны быть выбраны соответствующим образом. Это легко сделать с помощью простого компаса. Магнит должен быть направлен к Земле полюсом «S». Приведенная в действие катушка также должна смотреть на Землю с южным полюсом. Таким образом, катушка будет тянуть магнит, когда он находится в пределах своего магнитного поля.
Схема также содержит элементы, защищающие катушку и полевой транзистор от сгорания, когда объект прилипает к сердечнику или выпадает из поля. В этом случае схема управления катушкой закрыта, и ток там не течет. Итого:
- катушка точно и симметрично намотана,
- датчик расположен точно в центре сердечника,
- почти весь вес шара находится намного ниже магнита,
- катушка ориентирована точно вертикально.
Графики сигналов в контрольных точках
- Uh+: напряжение на положительном выходе галлотрона,
- Ua: напряжение на выходе повторителя A,
- Ub: напряжение на выходе инвертирующего усилителя B,
- Uc: напряжение на выходе триггера Шмидта C,
- Ud: напряжение, управляемое полевым транзистором.

Что касается потребления тока, измерения цифровым мультиметром показали значение ниже 100 мА (рост при увеличении веса). Чтобы увеличить грузоподъемность, катушки также должны быть увеличены, как и поперечное сечение сердечника и / или его магнитная проницаемость. Можно попытаться использовать ферритовое, но такие сердечники имеют значение частот выше 100 кГц.
Транзистор имеет постоянный ток 7 А и сопротивление канала 30 мОм. В результате он вообще не нагревается. Однако вы можете поднять напряжение, управляющее затвором транзистора, чтобы уменьшить это сопротивление, что, в свою очередь, уменьшит потери тепла в транзисторе.
На самом деле, расстояние от левитирующего объекта зависит от силы электромагнита. Это означает, что чем больше произведение тока катушки и количества витков катушек, тем больше напряженность магнитного поля, создаваемого катушкой. Но это еще не все. Кроме того, на расстояние также влияет проницаемость и площадь поперечного сечения сердечника, чувствительность и динамический диапазон датчика Холла, размер неодимового магнит (интенсивность магнитного поля).
Автор: crocodil, [email protected]
Опубликовано 15.01.2014
Создано при помощи КотоРед.
Левитация – одно из воплощений человеческой мечты о полете.
Созерцание парящего кристалла – хороший способ релаксации и пополнения пси-энергии.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен природными кристаллами пирита и халькопирита и имеет сходство с цельным кристаллом.
Согласно теореме Ирншоу, являющейся следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Однако существует возможность сделать левитацию реальной, например, используя электронную стабилизацию – электромагниты, управляемые посредством электроники.
Поскольку действительную природу магнетизма и гравитации никто пока не объяснил, то работу левитатора можно описать так:
Суммарная картина магнитных силовых линий неодимовых магнитов, расположенных в основании левитатора представляет собой поле магнитного кольца с прямоугольным поперечным сечением. Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
Картина силовых линий магнитного поля кольца, электромагнита и магнита.
При конструировании левитатора я ознакомился с патентом US20070170798: https://www.freepatentsonline.com/20070170798.pdf Вот некоторые рисунки с этого патента:
Контроль левитирующего магнита осуществляется с помощью оптических датчиков положения и 3-х пар электромагнитов. Смещение магнита влево компенсируется за счет сочетания действия южного полюса электромагнита A1 и северного полюса электромагнита A2. Конденсатор 23 помогает противостоять любым быстрым смещениям магнита.
Также была использована идея Nicanor Apostol: https://www.youtube.com/user/nick500453/videos для контроля положения левитирующего магнита с помощью датчиков магнитного поля – датчиков Холла.
Операционные усилители включены в дифференциальном режиме. Каждый датчик Холла выдает сигнал на два ОУ, на прямой вход одного и инвертирующий другого.
После некоторых раздумий и экспериментов получилась такая схема:
При появлении кристалла в зоне левитации, геркон замыкается и на схему подается питание, она начинает генерировать, возникает самовозбуждение системы – кристалл парит.
Устойчивая левитации кристалла достигается небольшим подгибанием датчиков Холла в вертикальной плоскости. При этом можно ориентироваться на потребление тока левитатором. При точной настройке оно будет менее 100mA, и при попытке сместить левитирующий кристалл по горизонтали в какую-либо сторону будут ощущаться одинаковые усилия. Также при точной настройке практически пропадает шум, связанный с работой электромагнитов. На первом ОУ и TL431 собран супервизор питания. Если при левитации кристалла пропадает синяя подсветка, значит, напряжение батареи менее 3.6V и её следует зарядить.
Кстати, в моем случае наблюдается интересное явление раскручивания кристалла против часовой стрелки. Если его слегка закрутить, то дальше он раскручивается сам – примерно до 50-140 оборотов в минуту, в зависимости от напряжения питания и высоты левитации. Связано это с неоднородностью намагниченности кристалла и с тем, что включенные по схеме звезда электромагниты левитатора в какой-то момент начинают работать подобно трехфазному двигателю.
Катушки электромагнитов использованы с двигателя ведущего вала видеомагнитофона (типа как на фото ниже). Индуктивность каждой 330mkH, сопротивление 2.2 Ohm. Направление намотки этих катушек видно на фото – это важно для правильной работы левитатора. В конструкции использовано шесть неодимовых магнитов 15*5*5мм, шесть 15*6*2мм и один диаметром 20мм, толщиной 5мм в кристалле. ОУ LMV324 можно заменить аналогичным по параметрам «rail to rail op amp». Вместо IRF7319 подойдёт IRF7389. В качестве ферромагнитного сердечника катушек электромагнитов использованы болты и гайки М4, они же и скрепляют всю конструкцию.
Разводка платы левитатора сделана в одном слое с помощью трассировщика Topo-R: https://eda.eremex.ru/ . На второй стороне платы фольга оставлена, она соединена с «землей» в двух точках. С кромок отверстий под выводы катушек, датчиков, светодиода фольга удалена зенкованием сверлом, диаметр которого в 3. 4 раза больше диаметра отверстий. Стеклотекстолит толщиной 1мм.
Вид собранной платы с двух сторон. Магниты держатся за счет взаимного притяжения , дополнительно они приклеены к плате суперклеем. Между катушками электромагнитов и платой проложена полоска двухстороннего скотча.
Магниты держатся за счет взаимного притяжения , дополнительно они приклеены к плате суперклеем. Между катушками электромагнитов и платой проложена полоска двухстороннего скотча.
Для полной картины отмечу, что возможны варианты магнитной левитации без всякой электроники: https://www.antigravity.net.au/ . Вот некоторые:
1. Если придать магниту в точке 1 быстрое вращение вокруг вертикальной оси (сделать из него волчок), то он там и будет оставаться. Сам по себе волчок стремится сразу перекувыркнуться и упасть. Раскрученный же волчок этого сделать не может – ему приходится противодействовать моменту инерции. Минус такого решения – ограниченное несколькими минутами время левитации.
2. Известно, что диамагнетики выталкиваются магнитным полем. Если взять кусок пиролитического графита (диамагнетика) – наш магнитик с удовольствием будет над ним левитировать. Минус – небольшая высота левитации, как следствие отсутствия в природе сильных диамагнетиков. Или сильных магнитов в маленьком объеме.
3. Вариант предыдущего случая – использовать «идеальный» диамагнетик, каковым есть по сути сверхпроводник. Например, высокотемпературный сверхпроводник с Пандоры – анобтаниум. Имеем приличную высоту парения сверхпроводника над магнитной подставкой. Минус решения – дороговизна. Нерафинированный анобтаниум стоит около двадцати миллионов долларов за килограмм, очищенный повышает стоимость вдвое – до сорока миллионов.
Этот серый камушек идет по 20 миллионов за кило.Предвидя вопросы, отвечу на некоторые из них:
1. Парящий кристалл есть нельзя, он не вкусный и не съедобный.
2. Если ты думаешь, что как магнитный железняк может притягивать железо, ты так же можешь заставить его притянуть куски керамики, то ты заблуждаешься,… магнитный железняк может притягивать железо, но не взаимодействует с медью. Таково движение Дао (из китайского философского трактата Хуайнань-цзы).
3. Именно анобтаниум вызвал появление на Пандоре таких изумительных геологических достопримечательностей, как каменные арки и парящие горы.
Разводку платы прилагаю. 🙂
. И некоторые идеи вдогонку — вариант Levi_2 (разводку платы прилагаю):
Отличие – низ левитатора подсвечивается 2-мя светодиодами, которые вынесены ближе к краям платы. Должно смотреться эффектнее, ярче.
Подсветку внизу можно сделать другим цветом, при разряде батареи будет пропадать только нижняя подсветка.
В качестве левитирующего кристалла заманчиво применить флюорит — флюоресцирующий минерал. Cиний светодиод подсветки поменять на ультрафиолетовый ..
DIY магнитный левитатор учебник по ПИД-схеме самодельный
КОМПЛЕКТ магнитной левитации ЧАСТЬ 3 — Испытание левитатора Теперь соединяю обе части вместе. Затем я подключаю несколько проводов и подаю на вход 12 В, а также добавляю перемычки для этих контактов. Теперь модуль включен, но вы увидите, что светодиод загорится только тогда, когда он обнаружит левитационный магнит. Итак, поместите близко к центру большой магнит, и вы увидите, что он останется в воздухе. Если магнитная сила толкает его в стороны, просто используйте потенциометры, чтобы отрегулировать усиление для оси X или Y и тем самым лучше центрировать магнит.Так здорово видеть, как магнит парит в воздухе.
Если магнитная сила толкает его в стороны, просто используйте потенциометры, чтобы отрегулировать усиление для оси X или Y и тем самым лучше центрировать магнит.Так здорово видеть, как магнит парит в воздухе.
Итак, комплект работает без проблем. Возможно, вам придется отрегулировать потенциометры и положение датчиков Холла, чтобы они были идеально выровнены. Схема работает достаточно хорошо. Все делается аналогично. Микроконтроллеров нет. Сигнал от датчиков Холла усиливается с помощью OPAMP и затем подается на транзисторы. Если магнит находится слишком далеко влево, датчик обнаруживает это, усиливается и увеличивает магнитное поле внутри левой катушки, так что магнит отодвигается обратно к центру и так далее… А теперь займемся схемой.
ЧАСТЬ 4 — Обратный инжиниринг
Я беру печатную плату и начинаю тестировать каждую площадку на предмет соединений. После нескольких часов пути у меня наконец была вся трасса. Вы можете скачать его снизу, а также получить файлы tge GERBER для печатной платы или посмотреть проект EasyEDA, если вам нужно создать свою собственную плату и придать ей желаемую форму. Схема немного хаотична, но ее можно понять. Для печатной платы я сделал ее такой же круглой формы и того же размера, что и комплектная печатная плата.Вам понадобятся обе печатные платы для завершения комплекта, и вы можете получить их обе снизу.
Схема немного хаотична, но ее можно понять. Для печатной платы я сделал ее такой же круглой формы и того же размера, что и комплектная печатная плата.Вам понадобятся обе печатные платы для завершения комплекта, и вы можете получить их обе снизу.
Ниже у вас есть схема компонентов PCB. Следуйте всем значениям на схеме и припаяйте их к печатной плате. У вас также есть проект EasyEDA ниже, если вы хотите сделать копию и сделать свою собственную доску. Надеюсь, эта схема вам поможет. В проекте EasyEDA у вас есть как схемы, так и печатные платы.
ЧАСТЬ 5 — Прочие схемы из Интернета
Я беру печатную плату и начинаю тестировать каждую площадку на предмет соединений.После нескольких часов пути у меня наконец была вся трасса. Вы можете скачать его снизу, а также получить файлы tge GERBER для печатной платы или посмотреть проект EasyEDA, если вам нужно создать свою собственную плату и придать ей желаемую форму. Схема немного хаотична, но ее можно понять. Для печатной платы я сделал ее такой же круглой формы и того же размера, что и комплектная печатная плата. Вам понадобятся обе печатные платы для завершения комплекта, и вы можете получить их обе снизу.
Для печатной платы я сделал ее такой же круглой формы и того же размера, что и комплектная печатная плата. Вам понадобятся обе печатные платы для завершения комплекта, и вы можете получить их обе снизу.
ЧАСТЬ 6 — Смотрите видео
Помогите мне, поделившись этим постом
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследовать
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О Массачусетском технологическом институте
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О Массачусетском технологическом институте
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
МАГЛЕВСКАЯ МАГНИТНАЯ ЛЕВИТАЦИЯ: ЦЕПНАЯ СХЕМА
КАК ЭТО РАБОТАЕТ
Сначала основная работа схемы: каждый датчик магнитного поля контролирует в полярность одной катушки электромагнита, а также полярность катушки влияет датчик магнитного поля. Это формирует цикл обратной связи, который контролирует
средний ток в катушке. Когда конец утюга катушки
ядро становится
«север», датчик обнаруживает это и заставляет ток в катушке реверсировать
направление. Затем, когда конец ядра пытается стать «южным»,
датчик снова меняет направление тока. Другими словами, датчик пытается
держите магнитное поле выключенным! Это система обратной связи, которая
динамически создает * нулевое * магнитное поле.
Это формирует цикл обратной связи, который контролирует
средний ток в катушке. Когда конец утюга катушки
ядро становится
«север», датчик обнаруживает это и заставляет ток в катушке реверсировать
направление. Затем, когда конец ядра пытается стать «южным»,
датчик снова меняет направление тока. Другими словами, датчик пытается
держите магнитное поле выключенным! Это система обратной связи, которая
динамически создает * нулевое * магнитное поле. Что в этом хорошего? Устройство, создающее нулевое магнитное поле? Очень
действительно полезно.Сверхпроводящие пластины также создают нулевое поле внутри
сами и тем самым отталкивают оба полюса постоянного магнита. Вот как
сверхпроводящая левитация работает: вещество с нулевым полем является естественным
отражатель полюсов магнита. Поэтому указанные выше катушки в моем
Магнитное устройство отталкивает полюс стержневого магнита независимо от того, является ли он
N или S. полюс.
Хорошо, нормально обратная связь работает, а полярность катушки
быстро меняется взад и вперед, с общим средним нулевым полем. Когда полюс N стержневого магнита приближается к датчику Холла, цепь
по-прежнему будет пытаться удерживать поле внутри переключателя Холла на нуле. Делать
это посылает ток через катушку, поэтому ток больше в одном
направление, чем другое, что делает магнитный полюс катушки, на
средний, становится «N», а не нулем, и это отталкивает магнит. (Подобно
полюса отталкиваются, поэтому северный полюс на конце катушки отталкивает северный
полюс на магните.) Два противоположно направленных магнитных поля нейтрализуют
до нуля прямо между магнитом и катушкой, прямо там, где холл
датчик сидит.Если полюс N стержневого магнита станет еще ближе, Холл
датчик скажет электромагниту оттолкнуть стержневой магнит еще больше
сильно. Если вместо этого мы будем держать полюс «S» стержневого магнита рядом с
датчик, средний ток в электромагните изменится на противоположное, и штанга
магнит все равно будет отталкиваться. Это система отрицательной обратной связи, основанная на
генератор естественного происхождения и широтно-импульсная модуляция.
Когда полюс N стержневого магнита приближается к датчику Холла, цепь
по-прежнему будет пытаться удерживать поле внутри переключателя Холла на нуле. Делать
это посылает ток через катушку, поэтому ток больше в одном
направление, чем другое, что делает магнитный полюс катушки, на
средний, становится «N», а не нулем, и это отталкивает магнит. (Подобно
полюса отталкиваются, поэтому северный полюс на конце катушки отталкивает северный
полюс на магните.) Два противоположно направленных магнитных поля нейтрализуют
до нуля прямо между магнитом и катушкой, прямо там, где холл
датчик сидит.Если полюс N стержневого магнита станет еще ближе, Холл
датчик скажет электромагниту оттолкнуть стержневой магнит еще больше
сильно. Если вместо этого мы будем держать полюс «S» стержневого магнита рядом с
датчик, средний ток в электромагните изменится на противоположное, и штанга
магнит все равно будет отталкиваться. Это система отрицательной обратной связи, основанная на
генератор естественного происхождения и широтно-импульсная модуляция. Круто, а?
Круто, а?
Прежде чем приступить к реализации крупного проекта железной дороги на магнитной подвеске, постройте одну
«репульсорная» катушка, чтобы почувствовать работу и продемонстрировать
интересный эффект отталкивания.Если вы строите большое количество цепей катушек
и они не работают, вам придется отлаживать их ВСЕ. Лучше
чтобы сначала избавиться от ошибок в одном.
ДЕТАЛИ ЭКСПЛУАТАЦИИ
Когда каждый переключатель Холла включен, он снижает напряжение на база первого транзистора NPN. Это выключает этот транзистор. Как в результате резистор 10 кОм может подтянуться к клеммам базы двух силовые транзисторы. Это включает транзистор NPN PWR, и он включает Транзистор PNP PWR выключен.Это подключает +24 вольт к электромагниту. катушка, и в катушке появляется ток. Появляется магнитное поле, которое выключает выключатель Холла, и это заставляет все транзисторы изменить состояние. Ток в катушке электромагнита меняется на противоположный, что поворачивает выключите переключатель Холла, и весь цикл будет повторяться. В результате устройство
действует как зуммер, переключатель Холла включается и выключается очень быстро, а
магнитное поле немного колеблется на север и юг, но в среднем поле
нуль. Когда полюс магнита приближается, датчик Холла начинает удерживать
катушка переключена на север дольше, чем на юг (или наоборот), чтобы
нейтрализовать поле, удерживая поле внутри датчика, усредняющее на
почти ноль.
В результате устройство
действует как зуммер, переключатель Холла включается и выключается очень быстро, а
магнитное поле немного колеблется на север и юг, но в среднем поле
нуль. Когда полюс магнита приближается, датчик Холла начинает удерживать
катушка переключена на север дольше, чем на юг (или наоборот), чтобы
нейтрализовать поле, удерживая поле внутри датчика, усредняющее на
почти ноль. Пара рядов этих устройств действует как железнодорожный путь на магнитной подвеске. Бар
магнит будет летать над ними, если его аккуратно перебросить между рядами.
Другие идеи: превратите одну катушку в полый серебряный пластиковый стержень, запустите его
батарейки в стержне и покажите учителю физики, что один конец
ваш «металлический стержень» отталкивает ОБЕИ концы любого стержневого магнита. Он / она взбесится,
потому что это может сделать только сверхпроводник при комнатной температуре. Комнатная температура
сверхпроводников не существует. Еще.
Все просто, но нестабильно
Одна серьезная проблема с магнитолой: нестабильность. Магнит
колебание нарастает до тех пор, пока магнит не будет отброшен. Это происходит
потому что крошечные движения в
приостановленный
стержневой магнит запускает компенсирующее магнитное поле через короткое время
задерживать. Это вызовет немного более крупные движения, которые вызовут даже
больше движений, и через несколько секунд магнит будет покачиваться, так что
яростно, что он будет выброшен из устройства.Это похоже на
противоположность трения. Устройство имеет
небольшая «отрицательная стабильность». Если вы можете заставить магнит перестать двигаться
первоначально колебания будут нарастать очень медленно или совсем не нарастать.
Магнит
колебание нарастает до тех пор, пока магнит не будет отброшен. Это происходит
потому что крошечные движения в
приостановленный
стержневой магнит запускает компенсирующее магнитное поле через короткое время
задерживать. Это вызовет немного более крупные движения, которые вызовут даже
больше движений, и через несколько секунд магнит будет покачиваться, так что
яростно, что он будет выброшен из устройства.Это похоже на
противоположность трения. Устройство имеет
небольшая «отрицательная стабильность». Если вы можете заставить магнит перестать двигаться
первоначально колебания будут нарастать очень медленно или совсем не нарастать.
Простое средство от раскачивания: поместите толстый стержень или пластину из цветного металла.
прямо под стержневым магнитом. Кусок алюминия отлично работает, а медь
работает даже лучше. Электрическое сопротивление стержня предложит некоторое
механическое демпфирование изменяющихся полей, это ослабит движение магнита,
и трепет утихнет.Другое решение: заменить каждую цепь
с АНАЛОГОВЫМ датчиком Холла и усилителем мощности постоянного тока (нужны большие радиаторы)
направить сигнал аналогового датчика Холла через усилитель и на катушку, и
использовать микросхемы операционного усилителя, чтобы добавить немного дифференцированного сигнала датчика Холла в
основной сигнал поступает на усилитель мощности постоянного тока. Это создаст некоторые
программируемое демпфирование с помощью аналоговых вычислений, и отменит
эффекты петлевой задержки, которая в первую очередь вызывает колебания.
И если вам все это удастся, вы станете экспертом в линейном управлении.
теория и системы пропорционального управления движением!
Это создаст некоторые
программируемое демпфирование с помощью аналоговых вычислений, и отменит
эффекты петлевой задержки, которая в первую очередь вызывает колебания.
И если вам все это удастся, вы станете экспертом в линейном управлении.
теория и системы пропорционального управления движением!
Датчики Холла для люльки Maglev
Выберите датчик с цифровым переключающим выходом (не пропорциональным аналоговый выход напряжения.) Датчик должен одинаково реагировать на поля любой полярности, поэтому выберите «двунаправленный» тип, который имеет одинаковые и напротив рейтингов B (вкл.) и B (выкл.). Подозреваю, что высокочувствительный детекторы могут работать лучше, чем нечувствительные, так как это должно уменьшить ток «дизеринга» в катушке левитации и заставляет систему немного работать кулер. Все, что ниже 10 мТл (100 гаусс), является высокочувствительным. Я не пытался замена нечувствительных детекторов на чувствительные. Может быть, более чувствительный детектор даст меньшую задержку по времени, большее отрицательное затухание и, следовательно, лучшая стабильность. Это эксперимент, который стоит попробовать.
Это эксперимент, который стоит попробовать. ДРУГИЕ ДАТЧИКИ ХОЛЛА
СОЗДАЙТЕ ГАУССМЕТР
, через Web EE
HAL102-ND Датчик Холла IC
Цена: около $ 1,00
Поставщик: digikey.com
Тип выхода: тонущий (O.C)
V (питание) = от + 0,3В до + 13,5В
I (питание) = 20 мА
Io (макс.) = 250 мА
Бон = + 6,5 мТл, + 65 гаусс
Boff = -6,5 мТ, 65 гаусс
Гист = 4,5 мТл, 45 гаусс
Макс частота = 50 кГц
_
/ |
| [] | Вывод 1 вывод
| |
| [] | Контакт 3 GND
| |
| [] | Контакт 2 Pwr (+ 12Vdc)
\ _ |
Нижний
Вид
Для проектов, включающих большие массивы датчиков на печатной плате, см.
Panasonic DN6849S-ND от Digi-key.Этот датчик имеет 4-выводную поверхность.
пакет mount и стоит около 1,50 доллара США.Сильная и стабильная магнитная левитация: 5 шагов (с изображениями)
Идея схемы проста: выключите магнит, когда поле выше порогового значения, и включите электромагнит, когда оно ниже порога. И электромагнит, и постоянный поднятый магнит будут вносить вклад в измеряемое поле. Поле, создаваемое одним только электромагнитом, ниже порогового значения, поэтому при отсутствии магнита для подъема электромагнит полностью включен.Но с постоянным магнитом рядом, сумма будет выше порога, и ток отключится, но затем сразу же включится и т. Д.: Он будет очень быстро колебаться, эффективно создавая сигнал ШИМ. Рабочий цикл этого ШИМ-сигнала зависит от положения магнита: если он далеко, рабочий цикл будет большим, а если он близок, рабочий цикл будет меньше: тяговая сила магнита, таким образом, изменяется плавно и поднятый объект стоит на месте.
Поле, создаваемое одним только электромагнитом, ниже порогового значения, поэтому при отсутствии магнита для подъема электромагнит полностью включен.Но с постоянным магнитом рядом, сумма будет выше порога, и ток отключится, но затем сразу же включится и т. Д.: Он будет очень быстро колебаться, эффективно создавая сигнал ШИМ. Рабочий цикл этого ШИМ-сигнала зависит от положения магнита: если он далеко, рабочий цикл будет большим, а если он близок, рабочий цикл будет меньше: тяговая сила магнита, таким образом, изменяется плавно и поднятый объект стоит на месте.
Частота генерируемого таким образом сигнала ШИМ определяется тем, насколько быстро катушка реагирует на изменения напряжения.Постоянная времени определяется индуктивностью L и сопротивлением R катушки: я измерил L = 6 мГн, R = 6 Ом, тау = L / R = 1 мс. Фактически, проверяя выходной сигнал датчика Холла с помощью «осциллографа», я вижу сигнал ШИМ, равный 0 (1 кГц). Удивительно наблюдать, как рабочий цикл этого сигнала изменяется, когда мы нажимаем или тянем магнит!
В схеме в качестве компаратора используется операционный усилитель LM358. Используемые частоты, O (1 кГц), достаточно медленные, поэтому специальный компаратор не требуется. Помните также, что этот операционный усилитель не является Rail-to-Rail: для хорошей работы количество входов должно оставаться ~ 1.На 5 В ниже Vcc, и выходной сигнал не будет выше, чем Vcc-1,5 В. Я проверил, что 3,5 В достаточно для полного включения IRLZ44N.
Используемые частоты, O (1 кГц), достаточно медленные, поэтому специальный компаратор не требуется. Помните также, что этот операционный усилитель не является Rail-to-Rail: для хорошей работы количество входов должно оставаться ~ 1.На 5 В ниже Vcc, и выходной сигнал не будет выше, чем Vcc-1,5 В. Я проверил, что 3,5 В достаточно для полного включения IRLZ44N.
Есть пара «признаков», о которых следует помнить: выход датчика подключен к положительному входу операционного усилителя, а отрицательный вход может регулироваться в диапазоне от 0 до 2,5 В. Таким образом, магнит отключится, если выходной сигнал датчика станет низким, что происходит, когда сильное поле B направлено от передней части к задней части датчика, а это означает, что магнит, который нужно поднять, должен иметь северный полюс вверх и ток через катушка должна вращаться против часовой стрелки, если смотреть сверху.Но не волнуйтесь, это будет легко отладить и исправить, если вы ошиблись.
Подстроечный потенциометр устанавливает порог. На практике это означает, что с помощью этого триммера можно изменить расстояние между катушкой и поднятым магнитом.
На практике это означает, что с помощью этого триммера можно изменить расстояние между катушкой и поднятым магнитом.
(PDF) Система цепи магнитной левитации: экспериментальное исследование
Журнал междисциплинарной инженерной науки и технологий (JMEST)
ISSN: 2458-9403
Vol. 6 Выпуск 7, июль — 2019
www.jmest.org
JMESTN42352994 10335
Система цепи магнитной левитации: экспериментальное исследование
Метин Экинджи
Университет Мармара, технологический факультет, электротехника —
Кафедра электроники
0002 Стамбул, Турция
00020002, Стамбул, Турция0002 Университет Мармара, технологический факультет, факультет электрикиЭлектронный
Стамбул, Турция,
Аннотация. В этой статье представлена фундаментальная система левитации
, в которой твердый магнитный материал
(постоянный магнит или PM) левитирует в воздушном зазоре
против силы тяжести. Хотя системы магнитной левитации
Хотя системы магнитной левитации
нестабильны и не являются линейными по своей природе, поэтому их трудно исследовать, они
представляют интерес для многих приложений. Система levitation
в основном состоит из двух частей: одна — это фиксированная часть
, в которой создается сила притяжения,
и другая — подвижная часть, в которой материал PM
подвешен в воздухе. В стабильной сбалансированной системе
привлекательная сила
увеличивается с уменьшением воздушного зазора, а сила
увеличивается с увеличением тока.Здесь мы представляем результаты экспериментов
для сбалансированной системы с материалом
PM (NdFeB), реагирующим на постоянный ток
потока, и мы сосредотачиваемся на взаимосвязи между силой
, воздушным зазором и линией нагрузки жесткий магнитный материал
. Оптимальная левитация
с оптимальным воздушным зазором достигается за счет использования различных характеристик нагрузки
твердого магнитного материала в замкнутой магнитной цепи
, и результаты исследования
представлены подробно. Исследование
Исследование
визуализирует взаимосвязь между теорией, дизайном и экспериментальной проверкой
, а также образовательные возможности
; следовательно,
очень подходит для поощрения и мотивации учащихся к пониманию
эффектов магнитных полей и теории магнитного поля
.
Ключевые слова: электромагнетизм, поток, левитация,
Датчик Холла, материаловедение.
I. ВВЕДЕНИЕ
Системы магнитной левитации и их применение
(транспортировка на магнитной подвеске, магнитные подшипники, виброизоляция
и т. Д.)) нашли широкое применение
как в промышленности, так и в исследованиях за последнее десятилетие. Как результат
, экспериментальные исследования и разработки
приложений с системами магнитной левитации увеличили
за счет серии технических исследований
[1] — [3], [6] — [15]. Однако теоретические расчеты производительности
были ограничены сложностью нелинейного расчета
[11].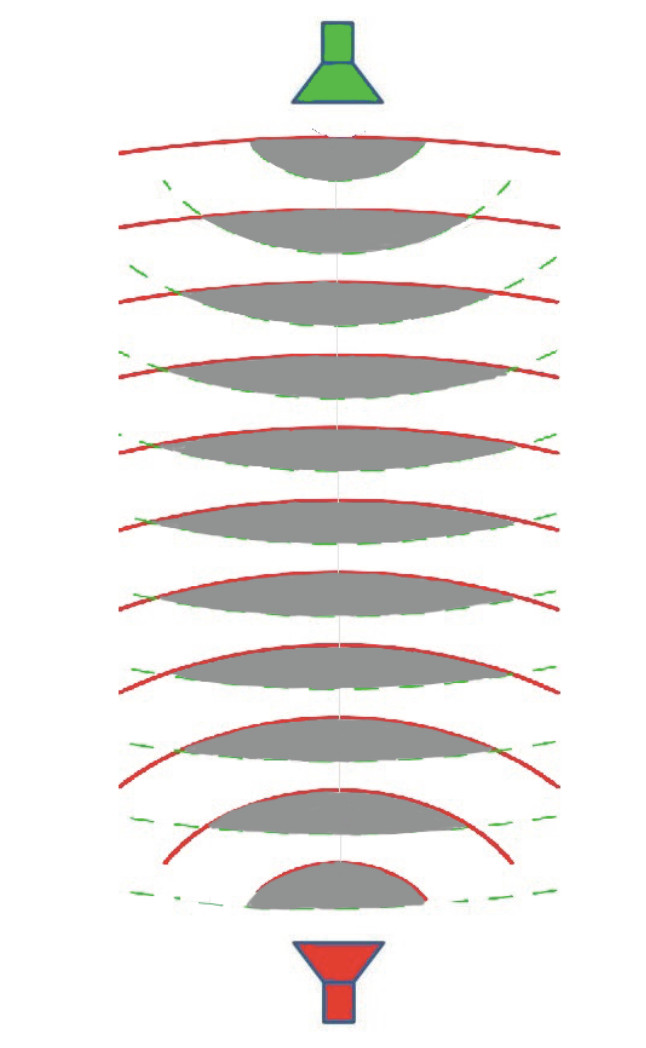 Тем не менее, для решения нелинейных случаев
Тем не менее, для решения нелинейных случаев
модель системы может быть представлена линейно
вокруг различных рабочих
точек. В этом исследовании проблема решается путем экспериментов
с многопозиционной системой управления с помощью
с учетом классических уравнений преобразования электромагнитной левитации
.
Мы можем кратко объяснить реализованную систему левитации
следующим образом: создается притягивающий магнитный поток
или, другими словами, сила магнитного поля
, создаваемая источником постоянного тока (DC)
определенным числом витков в катушке
, окружающей ферромагнитный материал.Когда движущийся объект
(ферромагнитный или PM-материал)
уравновешен противодействующими силами гравитационного и магнитного поля
в воздухе, эффект называется левитацией [1],
[15]. Поскольку нет физического контакта между подвижным объектом
и неподвижной частью системы,
не вызывает трения или потерь, связанных с этой технологией;
поэтому его применение повысило интерес к
в различных отраслях промышленности.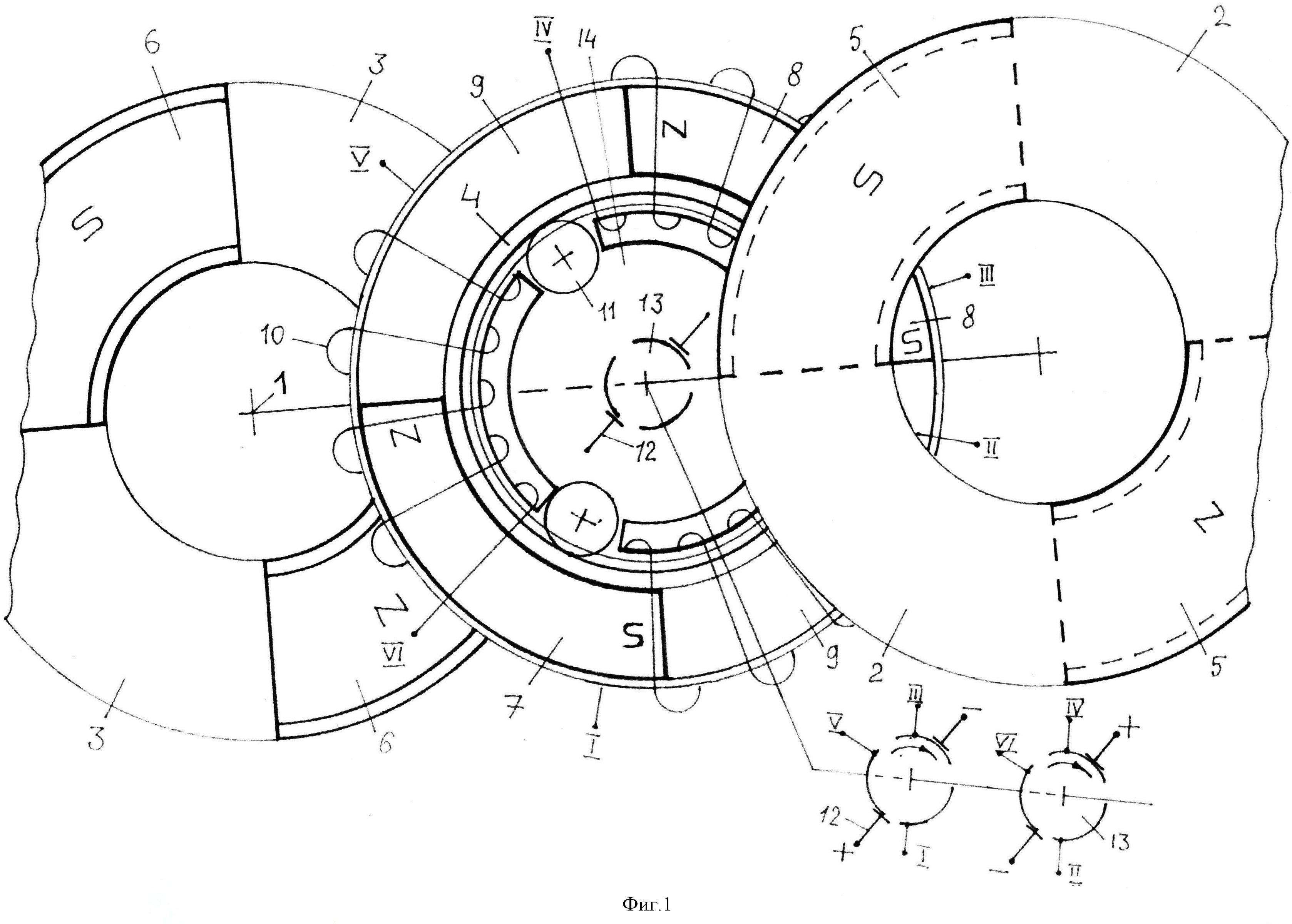 Цепь левитации
Цепь левитации
создает силу магнитного поля или магнитный поток
, чтобы подвесить объект в желаемом положении в воздухе.
После экспериментов со схемами левитации многими исследователями и преподавателями
стало понятно, что система левитации — это не простое устройство
[1] — [5]. Когда воздушный зазор между подвижным объектом
и магнитным источником слишком велик, сила магнитного поля
недостаточна для поддержания массы объекта
.Если он расположен слишком близко к источнику магнитного поля,
сила магнитного поля становится очень сильной
, и магнитное поле может легко притягивать объект до тех пор, пока
не окажется в прямом контакте с магнитом [3] — [4 ]. Как вкратце упоминалось ранее
, ясно, что устройство levitation
имеет длительный переходный режим. Управляя током
, приложенным к объекту, и разрабатывая стабилизирующий контроллер
, можно систематически измерять
положение массы и скорости по параметрам обратной связи
, вызванным изменениями магнитного потока, в пользу сбалансированного положения
для сфера PM (NdFeB), как видно на рис.
.1. На самом деле существует очень мало систем левитации
, использующих PM, в основном потому, что постоянные магниты
ранее не были очень надежными в высокотемпературных средах
, и их сила была слабой.
Большие магниты необходимы для обеспечения достаточной силы левитации
. Однако последние достижения в технологии редкоземельных постоянных магнитов с высокой энергией
позволили
преодолеть эти проблемы. Эти магниты, такие как магниты NdFeB
, обычно имеют высокую остаточную индукцию
и коэрцитивную силу и очень стабильны при более высоких рабочих температурах
[14].В этом эксперименте PM
(PDF) Магнитная левитация железной сферы с использованием аналогового контроллера pd
изменили макет, проверьте, нужно ли вам перевернуть цифры
. Для проверки системы действуйте следующим образом.
(1) Установите потенциометр усиления RV3 в среднее положение 4.
(2) Поверните потенциометр задания положения RV2 и наблюдайте
за током, контролируемым измерителем источника питания. При
При
ничего на пути инфракрасного светового луча, вы должны иметь возможность плавно изменять ток от нуля до максимума
примерно.
(3) Установите потенциометры опорного положения следующим образом: увеличивайте значение
, пока ток не станет максимальным; а затем
медленно уменьшайте его, пока ток не начнет уменьшаться.
(4) Попробуйте прервать луч инфракрасного света рукой.
У вас должна быть возможность плавно уменьшать ток до нуля.
Если этого не произошло, выключите и ищите неисправности проводки.
(5) Если вы не можете заставить цепь управления вести себя, как описано,
найдите неисправные компоненты.
6.2 Левитация мяча
Если предыдущие тесты прошли успешно, система, вероятно,
работает, и вы можете попробовать левитировать мяч следующим образом.
(1) Начните с шара подальше от магнита, чтобы на пути светового луча не было ничего
. Используйте измеритель источника питания
для контроля тока в положительной линии питания.
(2) Попробуйте поднять мяч в направлении магнита. Вы должны найти точку баланса
, где ток падает примерно до 0.6A и сила магнита
уравновешивают вес мяча. Осторожно отпустите мяч
; он, вероятно, останется левитирующим.
(3) Если левитация нестабильна, удалите шарик и уменьшите усиление
, повернув потенциометр усиления в положение 3 (см.
, раздел 3.3).
(4) Отрегулируйте опорный потенциометр положения, как прежде,
и повторите попытку.
(5) Если вы по-прежнему не можете заставить мяч левитировать, попробуйте внести небольшие корректировки
в контрольную точку положения.При необходимости
используйте положение 2 для потенциометра усиления; но более вероятно, что
неисправна в цепи.
(6) Когда вы подняли шар, вы должны иметь возможность
поднимать и опускать его положение на несколько миллиметров с помощью
, регулируя опорное положение контроль.
(7) Эта простая система не очень хорошо справляется с внезапными сбоями
. Вы можете легко убедиться в этом, ударив первым пальцем по столу
Вы можете легко убедиться в этом, ударив первым пальцем по столу
: не требуется очень большого удара, чтобы мяч упал с
.
7. ИССЛЕДОВАНИЕ СИСТЕМЫ
7.1 Синусоидальный отклик
В этом тесте используется лабораторный генератор функций для подачи внешнего входа
в систему левитации. И осциллограф
для проверки отклика. Сигнал подается на клемму Ext i / p
схемы управления, он влияет на изменение задания положения
.
(1) Выключите источник питания. Подключите канал II осциллографа
(осциллограф) к выходу функционального генератора.
(2) Подключите сигнальный провод канала I к выходу датчика положения
: это контакт с маркировкой Pos o / p на плате управления
Рис. 1. Оставьте заземление канала I
( заземление) Не подсоединенный провод.
(3) Выберите синусоидальный выход из функционального генератора, а
установите амплитуду на ноль. Выберите диапазон частот
и установите шкалу частоты в положение — это ниже на шкале
.
(4) Снова левитируйте мяч и медленно увеличивайте сигнал am-
до тех пор, пока не получите максимальное значение, работающее надежно.
Если мяч упал. Уменьшите амплитуду и попробуйте еще раз.
Вы должны иметь возможность заставить мяч двигаться вверх и вниз
на несколько миллиметров с настройкой амплитуды от
до. При необходимости отрегулируйте опорное положение и регуляторы усиления
.
(5) На дисплее осциллографа должны появиться две горизонтальные линии, перемещающиеся вместе с
вверх и вниз. Канал II эффективно
показывает изменение задания положения в результате
внешнего входа в схему управления; канал I показывает
, что приводит к изменению положения мяча.
(6) Уменьшите амплитуду сигнала примерно вдвое. и увеличьте частоту сигнала
до. Отрегулируйте настройки канала осциллографа I
,и II и настройку временной развертки для отображения одного цикла
каждой формы сигнала на экране; вам может потребоваться отрегулировать
элементы управления триггером, чтобы получить стабильное изображение. Убедитесь, что выбран режим с прерыванием
Убедитесь, что выбран режим с прерыванием
(кнопки DUAL и ADD
одновременно включены).
Вы должны увидеть синусоидальную форму для входного сигнала на
канале II и аналогичную форму для положения шара на канале
I.Если форма сигнала положения сильно искажена, попробуйте отрегулировать контрольный элемент положения
. Точно так же вы можете исследовать треугольный отклик
и прямоугольный отклик.
8. ЗАКЛЮЧЕНИЕ
Этот недорогой комплект для проектирования с магнитной левитацией предоставляет студенту
вмятину открытую конструктивную проблему. Производительность базовой системы
неадекватна по нескольким причинам, но студенты
могут применить свои знания для улучшения положения
датчика, магнитной подсистемы, силовой электроники и теории управления компенсацией.Реакция студентов на этот проект была очень положительной. Низкая стоимость набора позволяет каждому ученику
персонализировать свой набор, студенты могут провести множество экспериментов, используя эту модель
, и укрепить свои знания в современной теории управления
.
ССЫЛКИ
[1] Ф. К. Мун, Сверхпроводящая левитация, Джон Вили и
Sons, Inc., 1994.
[2] Хасан К. Халил. Нелинейные системы, Прентис-Холл, второе издание
, 1996.
[3] WG Hurley, M. Hynes и WH Wol’e: PWM Control
системы магнитной подвески, транзакции IEEE на
Education, vol.47, No. 2, May 2004
[4] THWong, Проектирование системы управления магнитной левитацией
— студенческий проект, IEEE Transactions on
Education, издание 29, ноябрь 1986 г., стр.196-200.
[5] Томас Л. Флойд, Основы электроники: схемы, De-
тиски и приложения, Prentice Hall, 7-е издание, 2006 г.
Сделай сам устройство электромагнитной левитации
Это устройство электромагнитной левитации — круто для создания антигравитационного проекта , за которым интересно и интересно наблюдать. Устройство может заставить что-то плавать без какой-либо видимой поддержки, это как объект, плавающий в свободном пространстве или в воздухе. Чтобы это устройство работало, вам нужно привлечь объект с помощью электромагнита, но когда он находится очень близко к электромагниту, электромагнит должен отключиться, и привлеченный объект должен упасть под действием силы тяжести и снова привлечь падающий объект, прежде чем он упадет. полностью из-за силы тяжести, и этот процесс продолжается.Этот проект похож на нашу ультразвуковую акустическую левитацию, но здесь вместо использования ультразвуковых волн мы будем использовать электромагнитные волны.
Чтобы это устройство работало, вам нужно привлечь объект с помощью электромагнита, но когда он находится очень близко к электромагниту, электромагнит должен отключиться, и привлеченный объект должен упасть под действием силы тяжести и снова привлечь падающий объект, прежде чем он упадет. полностью из-за силы тяжести, и этот процесс продолжается.Этот проект похож на нашу ультразвуковую акустическую левитацию, но здесь вместо использования ультразвуковых волн мы будем использовать электромагнитные волны.
Теперь возвращаясь к концепции, человек не может включать и выключать электромагнит, потому что этот процесс переключения должен происходить очень быстро и с заданным интервалом. Итак, мы создали схему переключения, которая управляет электромагнитом для достижения электромагнитного плавающего положения .
Требуемый компонент| С.Нет | Детали / Название компонента | Тип / Модель / Значение | Кол. Акций Акций |
| 1 | Датчик Холла | A3144 | 1 |
2 | МОП-транзистор | Irfz44N | 1 |
3 | Сопротивление | 330 Ом | 1 |
4 | Сопротивление | 1к | 1 |
5 | Обозначение L.E.D | 5мм любой цвет | 1 |
6 | Диод | IN4007 | 1 |
7 | Магнитный провод калибра 26 или 27 | от 0,41 до 0,46 мм | 1 кг или более |
8 | Пунктирная доска Vero | Малый | 1 |
Полную схему магнитной левитации можно найти ниже. Как видите, он состоит только из нескольких обычно доступных компонентов.
Как видите, он состоит только из нескольких обычно доступных компонентов.
Основными компонентами схемы DIY Magnetic levitation являются датчик Холла, полевой МОП-транзистор и электромагнитная катушка. Ранее мы использовали электромагнитные катушки для создания других интересных проектов, таких как миниатюрная катушка Тесла, пистолет с электромагнитной катушкой и т. Д.
Мы используем N-канальный Mosfet Irfz44N для самого первого включения и выключения электромагнитов.Irfz44n / любой N-канальный MOSFET или аналогичный (NPN) мощный транзистор может быть использован для этой цели, который имеет способность выдерживать большие токи, как TIP122 / 2N3055 и т.д. легко доступны на местных рынках. С другой стороны, он имеет способность выдерживать ток утечки 49А при температуре 25 градусов. Его можно использовать в широком диапазоне напряжений.
Сначала я экспериментировал и тестировал схему и весь проект на 12-вольтовой конфигурации, но обнаружил, что моя электромагнитная катушка и полевой МОП-транзистор сильно нагреваются, поэтому мне пришлось снова переключиться на 5 В. Я не заметил никакой разницы или проблем, а МОП-транзистор и катушка были при нормальной температуре. Также не было необходимости в радиаторе Mosfet.
Я не заметил никакой разницы или проблем, а МОП-транзистор и катушка были при нормальной температуре. Также не было необходимости в радиаторе Mosfet.
Резистор R1 используется для поддержания высокого напряжения на выводах затвора полевого МОП-транзистора (как подтягивающий резистор) для получения надлежащего порогового напряжения или напряжения запуска. Но когда неодимовые магниты находятся рядом с центральным датчиком эффекта Холла (в середине электромагнитов) или неодимовые магниты находятся в пределах диапазона датчика Холла, наша схема должна обеспечивать отрицательный выход на выводе затвора MOSFET.В результате падает напряжение на выводе / управляющем выводе, вывод стока на МОП-транзисторе для индикатора L.E.D. и электромагнита также падает, и он отключается. Когда объекты, прикрепленные с помощью неодимовых магнитов, падают или падают под действием силы тяжести, неодимовые магниты выходят за пределы диапазона датчика Холла, и теперь датчик Холла не обеспечивает никакого выходного сигнала. Вывод затвора полевого МОП-транзистора становится высоким и быстро срабатывает (для контакта управления сопротивлением R1 / вывода затвора уже высокий), быстро подает питание на электромагнитную катушку и притягивает объект, прикрепленный неодимовыми магнитами.Этот цикл продолжается, а объекты остаются висящими.
Вывод затвора полевого МОП-транзистора становится высоким и быстро срабатывает (для контакта управления сопротивлением R1 / вывода затвора уже высокий), быстро подает питание на электромагнитную катушку и притягивает объект, прикрепленный неодимовыми магнитами.Этот цикл продолжается, а объекты остаются висящими.
Сопротивление 330 Ом R2 используется для свечения светодиода при 5 В (индикаторный светодиод) и ограничивает ток и напряжение для защиты светодиода. Диод D1 — это не что иное, как диод блокировки обратной связи, используемый в каждом устройстве катушки, например реле для блокировки обратного напряжения обратной связи.
Построение цепи магнитной левитации Начнем с создания катушки для электромагнита. Для изготовления электромагнита воздухозаборника в первую очередь необходимо изготовить раму или корпус для электромагнитов.Для этого возьмите старую ручку диаметром около 8 мм, в которой уже есть центральное отверстие (в моем случае я измерил диаметр по шкале Вернье). Отметьте необходимую длину перманентным маркером и отрежьте примерно на 25 мм.
Отметьте необходимую длину перманентным маркером и отрежьте примерно на 25 мм.
Затем возьмите небольшой кусок картона / любого твердого бумажного материала, или вы можете использовать оргстекло и вырезать два куска намотки диаметром около 25 мм длиной с центральным отверстием, как показано на рисунке ниже.
Закрепить все с помощью «feviquick» или любого прочного клея.Наконец, рамка должна выглядеть так.
Если лень строить такое, можно взять старый держатель для паяльной проволоки.
Рама электромагнита готова. Теперь перейдем к изготовлению электромагнитной катушки. Сначала проделайте небольшое отверстие на одной стороне диаметра намотки и закрепите проволоку. Начните наматывать электромагнит и убедитесь, что он делает около 550 оборотов. Каждый слой отделяется лентой для виолончели или лентой другого типа. Если вам так лень делать свои электромагниты (в моем случае я сделал свои электромагниты, которые также имеют преимущество работы с 5 В), вы можете вынуть его из реле 6 В или 12 В, но вы должны быть осторожны, чтобы ваши Датчик Холла A3144 принимает максимум 5 В. Таким образом, вам нужно использовать микросхему регулятора напряжения LM7805 для подачи питания на датчик Холла.
Таким образом, вам нужно использовать микросхему регулятора напряжения LM7805 для подачи питания на датчик Холла.
Когда ваша центральная катушка электромагнита с воздушным сердечником будет готова, отложите ее в сторону и переходите к шагу 2. Разместите все компоненты и припаяйте их на плате Vero, как вы можете видеть на рисунках здесь.
Для фиксации электромагнитной катушки и датчика Холла необходима подставка, поскольку выравнивание состояния катушки и датчика важно для устойчивого подвешивания объекта к силе тяжести.Я разложил два куска трубки, картон и небольшой кусочек полиэтилентерефталата. проводка кожуха. Чтобы обозначить нужную длину, я использовал перманентный маркер, а для резки — ручную пилу и нож. И зафиксировал все с помощью клея и клеевого пистолета.
Проделайте отверстие в середине P.V.C. проводка кожуха и закрепить катушку с помощью клея. После этого сложите датчик. Вставьте внутрь отверстие электромагнитной катушки. Имейте в виду, что расстояние от подвешенного объекта (прикрепленного неодимовыми магнитами) до электромагнитной катушки зависит от того, насколько датчик вставлен в центральное отверстие электромагнита.Датчик на эффекте Холла имеет определенное расстояние срабатывания, которое должно быть в пределах диапазона электромагнитного притяжения, чтобы объекты идеально подвешивались. Наш самодельный прибор электромагнитной левитации готов к работе.
Имейте в виду, что расстояние от подвешенного объекта (прикрепленного неодимовыми магнитами) до электромагнитной катушки зависит от того, насколько датчик вставлен в центральное отверстие электромагнита.Датчик на эффекте Холла имеет определенное расстояние срабатывания, которое должно быть в пределах диапазона электромагнитного притяжения, чтобы объекты идеально подвешивались. Наш самодельный прибор электромагнитной левитации готов к работе.
Закрепите плату управления картоном, используя ленту с обеих сторон. Соедините их с рамой стойки с помощью кабельной стяжки. Выполните все соединения со схемой управления.Поместите датчик в центральное отверстие электромагнита. Настройте идеальное положение датчика Холла внутри электромагнита и установите максимальное расстояние между электромагнитом и неодимовыми магнитами. Расстояние может варьироваться в зависимости от силы притяжения вашего электромагнита. Включите его от мобильного зарядного устройства 5V 1Amp или 2Amp и сделайте первое испытание того, как работает проект.
Пожалуйста, обратите внимание на некоторые важные моменты, касающиеся этого проекта электромагнитной левитации.Выравнивание катушки и датчика очень важно. Поэтому необходимо подвешивать предметы устойчиво и прямо по отношению к силе тяжести. Стабильная система означает, что что-то сбалансировано. В качестве примера рассмотрим длинную палку, которую держат сверху. Он устойчив и свисает под действием силы тяжести. Если вы оттолкнете дно от прямого нижнего положения, сила тяжести будет стремиться вернуть его в устойчивое положение. Итак, из этого примера вы ясно понимаете, насколько важно прямое совмещение катушки и датчика.Важно, чтобы объект долго не падал ровно, поэтому мы делаем подставку для этого проекта. Для вашего лучшего понимания я создал блок-схему, показывающую важность стабильного подвешивания и способ монтажа датчика и катушки для достижения отличных характеристик.
- Если вы хотите увеличить расстояние между висящими предметами от электромагнита, вы должны увеличить мощность и диапазон притяжения электромагнита и изменить расположение / положение датчика.
- Если вы хотите повесить более крупные предметы, вам нужно увеличить мощность электромагнитного излучения. Для этого вам нужно увеличить ДАТЧИК магнитного провода и количество витков, а также требуется увеличенное количество неодимовых магнитов, прикрепленных к висящим предметам.
- Электромагнит большего размера потребляет больше тока, и моя схема в настоящее время работает только от 5 В, но в некоторых случаях может возникнуть необходимость в повышении напряжения в зависимости от параметра катушки.
- Если вы используете катушку реле 12 В или любую мощную электромагнитную катушку высокого напряжения, не забудьте использовать регулятор напряжения LM7805 для датчика Холла A3144.
На картинке ниже показано, как работает наш проект после завершения.
