Ардуино левитация горшка с карликовым деревом
На идею этого урока натолкнул проект краудфандинговой платформы Kickstarter под названием «Air Bonsai», действительно красивый и загадочный, который сделали японцы.

Но любая загадка может быть объяснена, если посмотреть внутрь. Фактически это магнитная левитация, когда есть объект, левитирующий сверху, и электромагнит, контролируемый схемой. Давайте попробуем вместе реализовать этот загадочный проект.
Шаг 1: Как это работает
Мы выяснили, что схема устройства на Кикстартере была довольно сложной, без какого-либо микроконтроллера. Не было возможности найти её аналоговую схему. На самом деле, если посмотреть более внимательно, принцип левитации довольно прост. Нужно сделать магнитную деталь, «плавающую» над другой магнитной деталью. Основная дальнейшая работа заключалась в том, чтобы левитирующий магнит не падал.
Было также предположение, что сделать это с Arduino на самом деле намного проще, чем пытаться понять схему японского устройства. На самом деле всё оказалось намного проще.
Магнитная левитация состоит из двух частей: базовой части и плавающей (левитирующей) части.
Основание
Эта часть находится внизу, которая состоит из магнита для создания круглого магнитного поля и электромагнитов для управления этим магнитным полем.
Каждый магнит имеет два полюса: север и юг. Эксперименты показывают, что противоположности притягиваются и одинаковые полюса отталкиваются. Четыре цилиндрических магнита помещаются в квадрат и имеют одинаковую полярность, образуя круглое магнитное поле вверх, чтобы вытолкнуть любой магнит, который имеет один и тот же полюс между ними.
Есть четыре электромагнита вообще, они помещены в квадрат, два симметричных магнита — пара, и их магнитное поле всегда противоположно. Датчик Холла и цепь управляют электромагнитами. Создаем противоположные полюса на электромагнитах током через них.
Плавающая деталь
Деталь включает в себя магнит, плавающий над основанием, который может нести небольшой горшок с растением или другие предметы.
Магнит сверху поднимается магнитным полем нижних магнитов, потому что они с одинаковыми полюсами. Однако, как правило, он склоняется к падению и притягиванию друг к другу. Чтобы предотвратить переворот и падение верхней части магнита, электромагниты создадут магнитные поля, чтобы толкать или тянуть, дабы сбалансировать плавающую часть, благодаря датчику Холла. Электромагниты управляются двумя осями X и Y, в результате чего верхний магнит поддерживается сбалансированным и плавающим.
Контролировать электромагниты нелегко, требуется ПИД-регулятор, который подробно обсуждается на следующем шаге.
Шаг 2: ПИД-регулятор (PID)

Из Википедии: «Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.»
В простом понимании: «ПИД-регулятор вычисляет значение «ошибки» как разность между измеренным [Входом] и желаемой установкой. Контроллер пытается свести к минимуму ошибку, отрегулировав [выход]».
Итак, вы указываете PID, что измерить (Вход), какое значение вы хотите и переменную, которая поможет иметь это значение на выходе. Далее ПИД-регулятор настраивает выходной сигнал, чтобы сделать вход равным установке.
Для примера: в автомобиле у нас три значения (Вход, Установка, выход) будут — скорость, желаемая скорость и угол педали газа, соответственно.
В данном проекте:
- Вход представляет собой текущее значение в реальном времени от датчика холла, которое обновляется непрерывно, поскольку положение плавающего магнита будет меняться в реальном времени.
- Заданное значение — это значение от датчика холла, которое измеряется, когда плавающий магнит находится в положении баланса, в центре основания магнитов. Этот индекс фиксирован и со временем не изменяется.
- Выходной сигнал — скорость для управления электромагнитами.
Стоит поблагодарить сообщество любителей Arduino, которое написало PID-библиотеку и которая очень проста в использовании. Дополнительная информация об Arduino PID есть на официальном сайте Arduino. Нам нужно использовать пару ПИД-регуляторов под Arduino, один для оси X и другой для оси Y.
Шаг 3: Комплектующие

Список комплектующих для урока получается приличным. Ниже приведен список компонентов, которые вы должны купить для этого проекта, убедитесь, что у вас есть все перед запуском. Некоторые из компонентов очень популярны, и, вероятно, вы найдете их на своем собственном складе или дома.
- 1x — LM324N
- 4x — левитационная катушка

- 2x — SS495a датчик Холла
- 1x — 12V 2A DC адаптер
- 8x — Кольцевой магнит D15*4 мм
- 1x — Разъем питания постоянного тока
- 4x — Кольцевой магнит D15*3 мм
- 1x — Arduino pro mini
- 1x — Модуль L298N
- 1x — 14 гнездовой сокет
- 2x — Магнит D35*5мм
- 2x — Резистор 5.6 KОм
- 2x — Резистор 180 КОм
- 2x — Резистор 47 KОм
- 2x- 10 Kом потенциометр
- 1x — Акриловый лист A5 размера
- 1x — Деревянный горшок
- 1x — PCB макет
- 8x — 3 мм винт
- провода
- Мини-растение (суккулент, кактус, мини-бонсай, карликовое дерево)

Шаг 4: Инструменты
Вот список инструментов, наиболее часто используемых:
- Паяльник
- Ручная пила
- Мультиметр
- Дрель
- Осциллограф (по желанию, можете использовать мультиметр)
- Настольное сверло
- Горячий клей
- Плоскогубцы
Шаг 5: LM324 Op-amp, L298N драйвер и SS495a
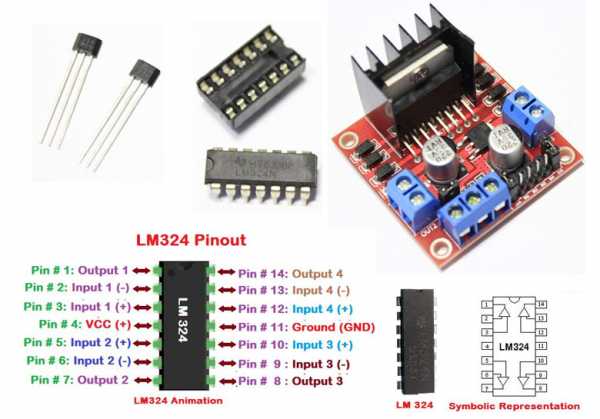
LM324 Op-amp
Операционные усилители (op-amp) являются одними из наиболее важных, широко используемых и универсальных схем, используемых сегодня.
Мы используем операционный усилитель для усиления сигнала от датчика Холла, цель которого — увеличить чувствительность, чтобы ардуино легко распознало изменение магнитного поля. Изменение нескольких мВ на выходе датчика холла, после прохождения усилителя может измениться на несколько сотен единиц в Arduino. Это необходимо для обеспечения плавного и стабильного функционирования ПИД-регулятора.
Обычным операционным усилителем, который мы выбрали, является LM324, это дешево, и вы можете купить его в любом магазине электроники. LM324 имеет 4 внутренних усилителя, которые позволяют гибко его использовать, однако в этом проекте нужны только два усилителя: один для оси X, а другой для оси Y.
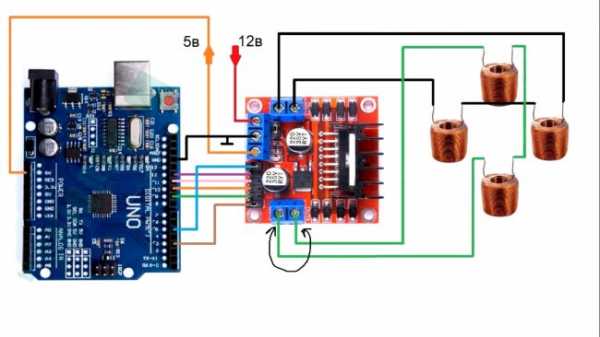
Модуль L298N
Двойной H-мост L298N обычно используется для управления скоростью и направлением двух двигателей постоянного тока или с легкостью управляет одним биполярным шаговым двигателем. L298N может использоваться с двигателями с напряжением от 5 до 35 В постоянного тока.
Существует также встроенный регулятор 5V, поэтому, если напряжение питания до 12 В, вы также можете подключить источник питания 5 В от платы.
В этом проекте использован L298N для управления двумя парами катушек электромагнита и использован выход 5 В для питания Arduino и датчика холла.
Распиновка модулей:
- Out 2: пара электромагнитов X
- Out 3: пара электромагнитов Y
- Входное питание: вход постоянного тока 12 В
- GND: Земля
- Выход 5v: 5v для датчиков Arduino и холла
- EnA: Включает сигнал PWM для выхода 2
- In1: Включить для выхода 2
- In2: Enable for Out 2
- In3: Включить для выхода 3
- In4: Включить для выхода 3
- EnB: Включает PWM-сигнал для Out3
Подключение к Arduino: нам нужно удалить 2 перемычки в контактах EnA и EnB, затем подключить 6 контактов In1, In2, In3, In4, EnA, EnB к Arduino.
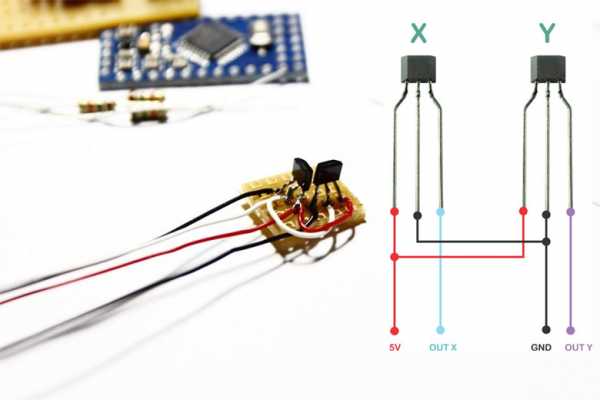
SS495a Датчик Холла
SS495a — это линейный датчик Холла с аналоговым выходом. Обратите внимание на разницу между аналоговым выходом и цифровым выходом, вы не можете использовать датчик с цифровым выходом в этом проекте, он имеет только два состояния 1 или 0, поэтому вы не можете измерить выход магнитных полей.
Аналоговый датчик приведет к диапазону напряжений от 250 до Vcc, который вы можете прочитать с помощью аналогового входа Arduino. Для измерения магнитного поля в обеих осях X и Y требуются два датчика холла.
Шаг 6: Неодимовые магниты NdFeB (неодим-железо-бор)

Из Википедии: «Неодим — химический элемент, редкоземельный металл серебристо-белого цвета с золотистым оттенком. Относится к группе лантаноидов. Легко окисляется на воздухе. Открыт в 1885 году австрийским химиком Карлом Ауэром фон Вельсбахом. Используется как компонент сплавов с алюминием и магнием для самолёто- и ракетостроения.»
Неодим — это металл, который является ферромагнитным (в частности, он показывает антиферромагнитные свойства), что означает, что подобно железу его можно намагнитить, чтобы он стал магнитом. Но его температура Кюри составляет 19К (-254 ° С), поэтому в чистом виде его магнетизм проявляется только при чрезвычайно низких температурах. Однако соединения неодима с переходными металлами, такими как железо, могут иметь температуры Кюри значительно выше комнатной температуры, и они используются для изготовления неодимовых магнитов.
Сильный — это слово, которое используют для описания неодимового магнита. Вы не можете использовать ферритовые магниты, потому что их магнетизм слишком слаб. Неодимовые магниты намного дороже ферритовых магнитов. Маленькие магниты используются для основы, большие магниты для плавающей/левитирующей части.
Внимание! Вам нужно быть осторожным при использовании неодимовых магнитов, так как их сильный магнетизм может навредить вам, или они могут сломать данные вашего жесткого диска или других электронных устройств, на которые влияют магнитные поля.
Совет! Вы можете отделить два магнита, потянув их в горизонтальное положение, вы не сможете отделить их в противоположном направлении, потому что их магнитное поле слишком сильное. Они также очень хрупкие и легко ломаются.
Шаг 7: Готовим основание
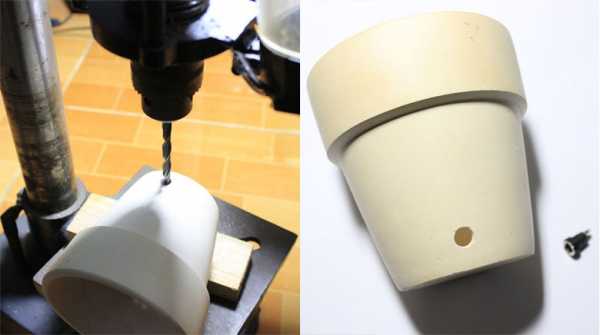
Использовали небольшой терракотовый горшок, который обычно используется для выращивания суккулента или кактуса. Вы также можете использовать керамический горшок или деревянный горшок, если они подходят. Используйте сверло диаметром 8 мм, чтобы создать отверстие в нижней части горшка, которое используется для удерживания гнезда постоянного тока.
Шаг 8: 3D-печать плавающей части

Если у вас есть 3D-принтер — здорово. У вас есть возможность сделать все с помощью него. Если принтера нет — не отчаивайтесь, т.к. вы можете использовать дешевую услугу 3D-печати, которая сейчас очень популярна.
Для лазерной резки файлы также в архиве выше — файл AcrylicLaserCut.dwg (это autocad). Акриловая деталь используется для поддержки магнитов и электромагнитов, остальные — для покрытия поверхности терракотового горшка.
Шаг 9: Подготовка SS495a модуля датчика Холла
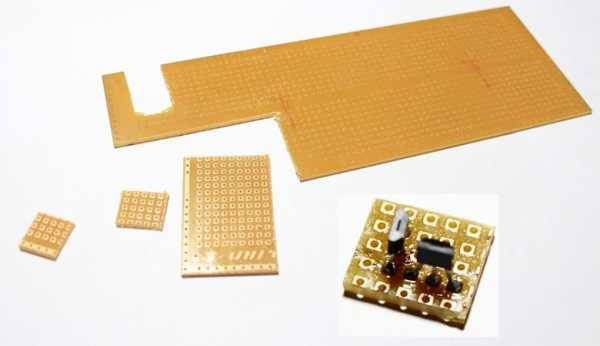
Вырежьте макет PCB на две части, одну часть, чтобы прикрепить датчик холла, а другой — к цепи LM324. Прикрепите два магнитных датчика перпендикулярно печатной плате. Используйте тонкие провода для соединения двух штырей датчиков VCC вместе, сделайте то же самое с контактами GND. Выходные контакты отдельно.
Шаг 10: Цепь Op-amp
Припаяйте гнездо и резисторы к печатной плате, следуя схеме, обратив внимание на то, чтобы поместить два потенциометра в одном направлении для более легкой калибровки позже. Присоедините LM324 к гнезду, затем подключите два выхода модуля датчиков холла к цепи op-amp.
Два выходных провода LM324 подключите к Arduino. Вход 12 В с входом 12 В модуля L298N, выход 5 В модуля L298N к 5V потенциометра.
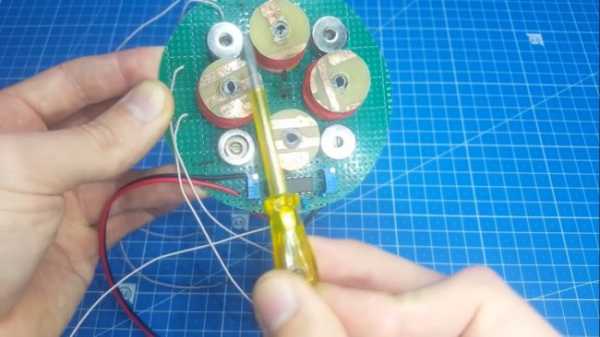
Шаг 11: Сборка электромагнитов
Соберите электромагниты на акриловый лист, они закреплены в четырех отверстиях вблизи центра. Затяните винты, чтобы избежать движения. Поскольку электромагниты симметричны по центру, они всегда находятся на полюсах напротив, так что провода на внутренней стороне электромагнитов соединены вместе, а провода на внешней стороне электромагнитов подключены к L298N.
Протяните провода под акриловым листом через соседние отверстия, чтобы подключиться к L298N. Медный провод покрыт изолированным слоем, поэтому вы должны удалить его ножом, прежде чем вы сможете припаять их вместе.
Шаг 12: Сенсорный модуль и магниты
Используйте горячий клей для фиксации модуля датчика между электромагнитами, обратите внимание, что каждый датчик должен быть квадратным с двумя электромагнитами, один на передней и другой на задней панели. Попробуйте выполнить калибровку двух датчиков как можно более централизованно, чтобы они не перекрывались, что сделает датчик наиболее эффективным.
Следующий шаг — собрать магниты на акриловой основе. Объединяя два магнита D15*4 мм и магнит D15*3 мм вместе, чтобы сформировать цилиндр, это приведет к тому, что магниты и электромагниты будут иметь одинаковую высоту. Соберите магниты между парами электромагнитов, обратите внимание, что полюса восходящих магнитов должны быть одинаковыми.
Шаг 13: Разъем питания постоянного тока и выход L298N 5V
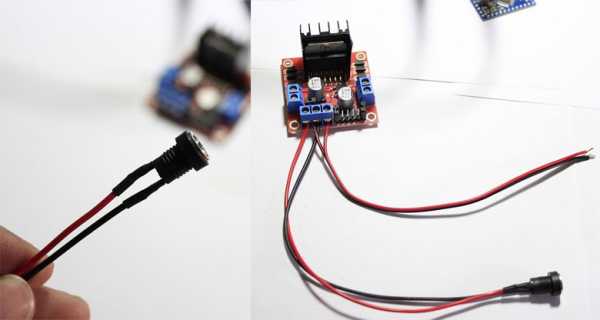
Припаяйте гнездо питания постоянного тока двумя проводами и используйте термоусадочную трубку. Подключенный разъем питания постоянного тока к входу модуля L298N, его выход 5 В будет подавать питание на Arduino.
Шаг 14: L298N и Arduino
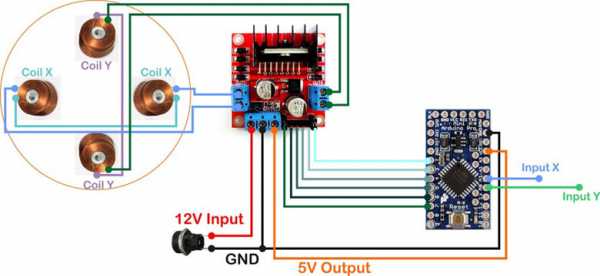
Подключите модуль L298N к Arduino, следуя приведенной выше схеме:
L298N → Ардуино
5V → VCC
GND → GND
EnA → 7
В1 → 6
В2 → 5
В3 → 4
В4 → 3
EnB → 2
Шаг 15: Arduino Pro Mini программер

Поскольку у Arduino pro mini нет USB-порта для последовательного порта, вам необходимо подключить внешний программатор. FTDI Basic будет использоваться для программирования (и питания) Pro Mini.
Шаг 16: Подготовка плавающей части
Соедините два магнита D35*5 для увеличения магнетизма.
Шаг 17: Калибровка
Загрузите программу ReadSetpoint.ino в Arduino, которую можно скачать выше. Эта программа будет считывать значения датчика Холла и отправлять их на компьютер через последовательный порт. Откройте COM-порт, чтобы увидеть его. Подключите 12 В постоянного тока к гнезду питания постоянного тока, вы также используете осциллограф для считывания значения датчика.
Наблюдайте значения на экране и внесите корректировки, установив два потенциометра. Наилучшее значение — 560, при этом выход датчика составляет около 2,5 В. После установки заданного значения поместите плавающий магнит над базовой частью и встряхните его, чтобы увидеть изменение значения установки (Setpoint) на экране.
Шаг 18: Загрузка основной программы
После калибровки значения установки (Setpoint) самое время получить результаты. Загрузите основную программу Levitation.ino, которая приведена выше.
Используйте супер клей для фиксации магнита и держателя магнита, который ранее был напечатан на 3D-принтере. После загрузки основной программы вы можете внести небольшие корректировки на потенциометры, чтобы плавающая деталь была зафиксирована в центре.
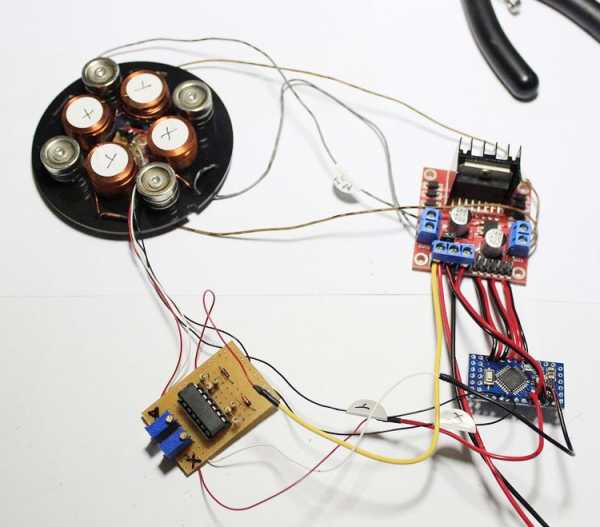
Шаг 19: Собираем всё вместе
Сначала прикрепите гнездо питания постоянного тока к горшку, затем поместите оставшиеся части в горшок. Наконец, используйте оставшийся акриловый лист, чтобы сделать поверхность горшка.
Шаг 20: Подготовка растения
Прикрепите деревянный горшок к плавающей части магнита. Мы использовали маленький кактус для посадки. Вы можете использовать кактус или суккулент или любой мини-бонсай, который является маленьким и легким.
Шаг 21: Финальный результат


Наслаждайтесь своим результатом, благодаря вашим усилиям вы сделали отличный проект, который теперь будет радовать вас и ваших друзей.
arduinoplus.ru
РадиоКот :: Levitator
РадиоКот >Схемы >Аналоговые схемы >Игрушки >Levitator
Левитация – одно из воплощений человеческой мечты о полете.
Созерцание парящего кристалла – хороший способ релаксации и пополнения пси-энергии.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен природными кристаллами пирита и халькопирита и имеет сходство с цельным кристаллом.
Согласно теореме Ирншоу, являющейся следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Однако существует возможность сделать левитацию реальной, например, используя электронную стабилизацию – электромагниты, управляемые посредством электроники.
Поскольку действительную природу магнетизма и гравитации никто пока не объяснил, то работу левитатора можно описать так:
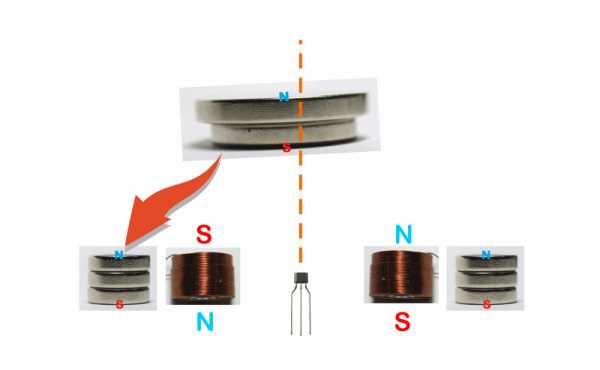
Суммарная картина магнитных силовых линий неодимовых магнитов, расположенных в основании левитатора представляет собой поле магнитного кольца с прямоугольным поперечным сечением. Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
Картина силовых линий магнитного поля кольца, электромагнита и магнита.
При конструировании левитатора я ознакомился с патентом US20070170798: https://www.freepatentsonline.com/20070170798.pdf Вот некоторые рисунки с этого патента:
Контроль левитирующего магнита осуществляется с помощью оптических датчиков положения и 3-х пар электромагнитов. Смещение магнита влево компенсируется за счет сочетания действия южного полюса электромагнита A1 и северного полюса электромагнита A2. Конденсатор 23 помогает противостоять любым быстрым смещениям магнита.
Также была использована идея Nicanor Apostol: https://www.youtube.com/user/nick500453/videos для контроля положения левитирующего магнита с помощью датчиков магнитного поля – датчиков Холла.
Операционные усилители включены в дифференциальном режиме. Каждый датчик Холла выдает сигнал на два ОУ, на прямой вход одного и инвертирующий другого.
После некоторых раздумий и экспериментов получилась такая схема:
При появлении кристалла в зоне левитации, геркон замыкается и на схему подается питание, она начинает генерировать, возникает самовозбуждение системы – кристалл парит.
Устойчивая левитации кристалла достигается небольшим подгибанием датчиков Холла в вертикальной плоскости. При этом можно ориентироваться на потребление тока левитатором. При точной настройке оно будет менее 100mA, и при попытке сместить левитирующий кристалл по горизонтали в какую-либо сторону будут ощущаться одинаковые усилия. Также при точной настройке практически пропадает шум, связанный с работой электромагнитов. На первом ОУ и TL431 собран супервизор питания. Если при левитации кристалла пропадает синяя подсветка, значит, напряжение батареи менее 3.6V и её следует зарядить.
Кстати, в моем случае наблюдается интересное явление раскручивания кристалла против часовой стрелки. Если его слегка закрутить, то дальше он раскручивается сам – примерно до 50-140 оборотов в минуту, в зависимости от напряжения питания и высоты левитации. Связано это с неоднородностью намагниченности кристалла и с тем, что включенные по схеме звезда электромагниты левитатора в какой-то момент начинают работать подобно трехфазному двигателю.
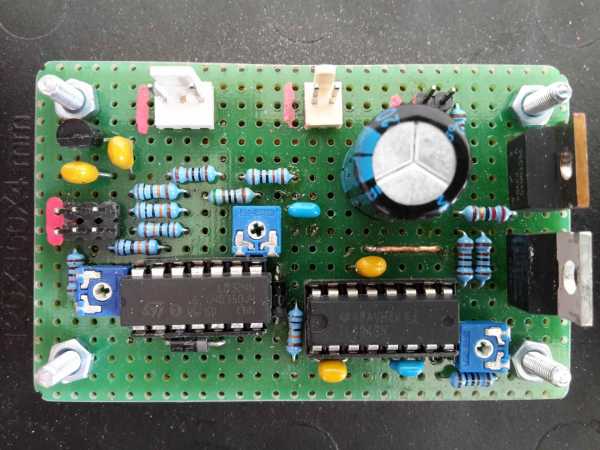
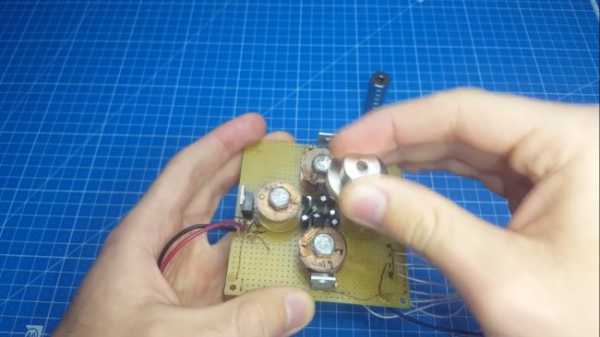
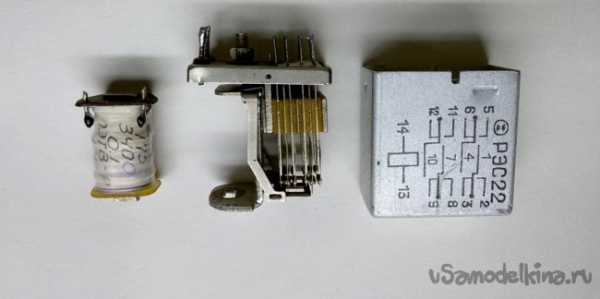
Катушки электромагнитов использованы с двигателя ведущего вала видеомагнитофона (типа как на фото ниже). Индуктивность каждой 330mkH, сопротивление 2.2 Ohm. Направление намотки этих катушек видно на фото – это важно для правильной работы левитатора. В конструкции использовано шесть неодимовых магнитов 15*5*5мм, шесть 15*6*2мм и один диаметром 20мм, толщиной 5мм в кристалле. ОУ LMV324 можно заменить аналогичным по параметрам «rail to rail op amp». Вместо IRF7319 подойдёт IRF7389. В качестве ферромагнитного сердечника катушек электромагнитов использованы болты и гайки М4, они же и скрепляют всю конструкцию.
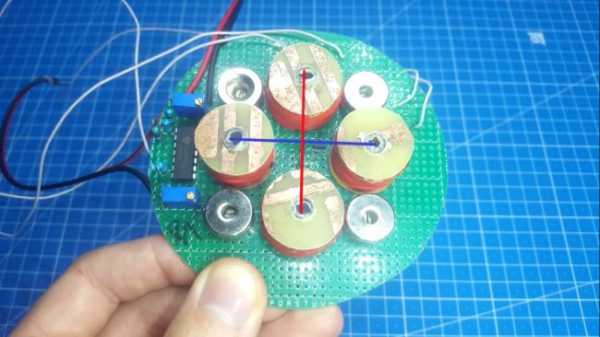
Разводка платы левитатора сделана в одном слое с помощью трассировщика Topo-R: https://eda.eremex.ru/ . На второй стороне платы фольга оставлена, она соединена с «землей» в двух точках. С кромок отверстий под выводы катушек, датчиков, светодиода фольга удалена зенкованием сверлом, диаметр которого в 3…4 раза больше диаметра отверстий. Стеклотекстолит толщиной 1мм.
Вид собранной платы с двух сторон. Магниты держатся за счет взаимного притяжения , дополнительно они приклеены к плате суперклеем. Между катушками электромагнитов и платой проложена полоска двухстороннего скотча.
Для полной картины отмечу, что возможны варианты магнитной левитации без всякой электроники: https://www.antigravity.net.au/ . Вот некоторые:
1. Если придать магниту в точке 1 быстрое вращение вокруг вертикальной оси (сделать из него волчок), то он там и будет оставаться. Сам по себе волчок стремится сразу перекувыркнуться и упасть. Раскрученный же волчок этого сделать не может – ему приходится противодействовать моменту инерции. Минус такого решения – ограниченное несколькими минутами время левитации.
2. Известно, что диамагнетики выталкиваются магнитным полем. Если взять кусок пиролитического графита (диамагнетика) – наш магнитик с удовольствием будет над ним левитировать. Минус – небольшая высота левитации, как следствие отсутствия в природе сильных диамагнетиков. Или сильных магнитов в маленьком объеме.
3. Вариант предыдущего случая – использовать «идеальный» диамагнетик, каковым есть по сути сверхпроводник. Например, высокотемпературный сверхпроводник с Пандоры – анобтаниум. Имеем приличную высоту парения сверхпроводника над магнитной подставкой. Минус решения – дороговизна. Нерафинированный анобтаниум стоит около двадцати миллионов долларов за килограмм, очищенный повышает стоимость вдвое – до сорока миллионов.
Этот серый камушек идет по 20 миллионов за кило.
Предвидя вопросы, отвечу на некоторые из них:
1. Парящий кристалл есть нельзя, он не вкусный и не съедобный.
2. Если ты думаешь, что как магнитный железняк может притягивать железо, ты так же можешь заставить его притянуть куски керамики, то ты заблуждаешься,… магнитный железняк может притягивать железо, но не взаимодействует с медью. Таково движение Дао (из китайского философского трактата Хуайнань-цзы).
3. Именно анобтаниум вызвал появление на Пандоре таких изумительных геологических достопримечательностей, как каменные арки и парящие горы.
Видео работы: https://www.dropbox.com/s/wnsko62jezjitaf/Levi.mkv
Вопросы по конструкции можно задать здесь: https://radiokot.ru/forum/viewtopic.php?f=3&t=4810
Разводку платы прилагаю. 🙂
… И некоторые идеи вдогонку — вариант Levi_2 (разводку платы прилагаю):
Отличие – низ левитатора подсвечивается 2-мя светодиодами, которые вынесены ближе к краям платы. Должно смотреться эффектнее, ярче.
Подсветку внизу можно сделать другим цветом, при разряде батареи будет пропадать только нижняя подсветка.
В качестве левитирующего кристалла заманчиво применить флюорит — флюоресцирующий минерал. Cиний светодиод подсветки поменять на ультрафиолетовый ..
Файлы:
Документ PDF
Levi_2
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Левитрон – схема устройства электромагнитной левитации своими руками
Идея устройства очень проста, электромагнит поднимает в воздух магнит, а для создания эффекта левитации в магнитном поле, он подключен к высокочастотному источнику, который то поднимает, то опускает объект.

Шаг 1: Схема устройства
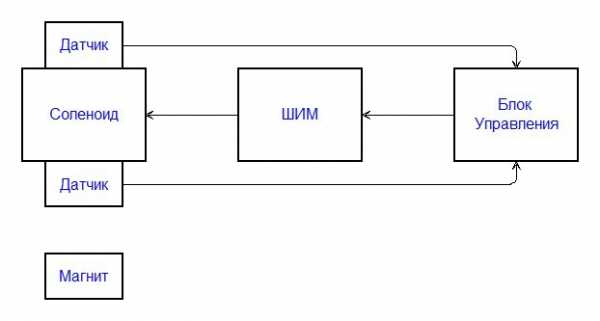

Схема на удивление проста и я полагаю, что у вас не составит труда собрать левитрон своими руками. Вот список компонентов:
Шаг 2: Сборка

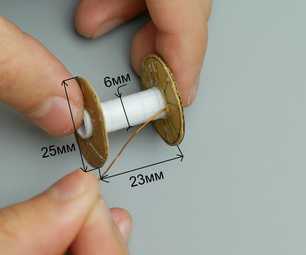
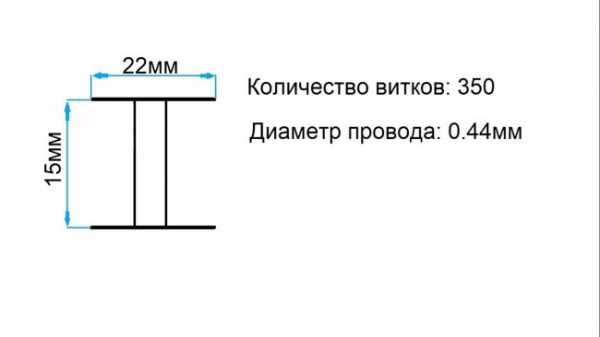
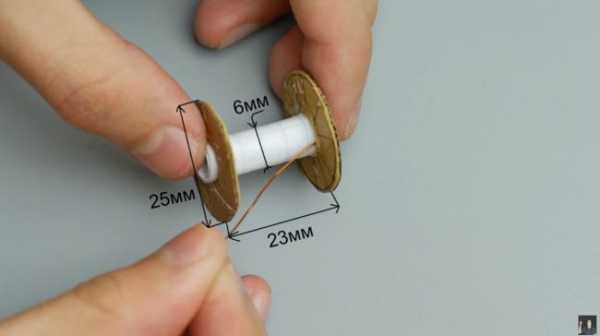
Приступим к сборке. Сперва нам нужно сделать рамку для электромагнита примерно таких размеров: диаметр 6 мм, высота мотка примерно 23 мм, и диаметр ушек около 25 мм. Как видите, изготовить её можно из обычного листа, картона и суперклея. теперь закрепим начало мотка на рамке и расслабимся — нам нужно будет сделать около 550 оборотов, неважно в каком набавлении. Я сделал 12 слоёв, что отняло у меня 1.5 часа.
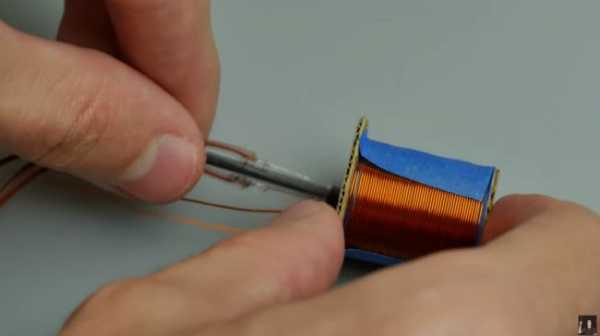
Шаг 3: Спайка
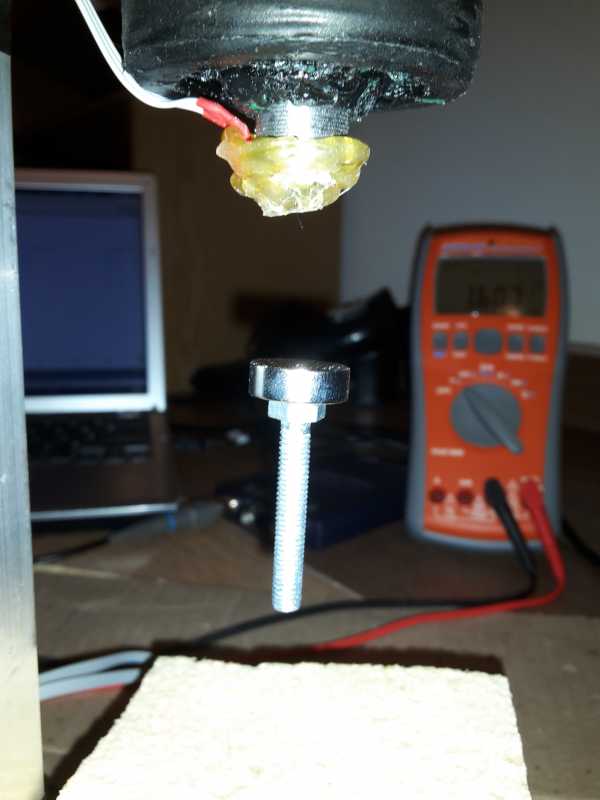
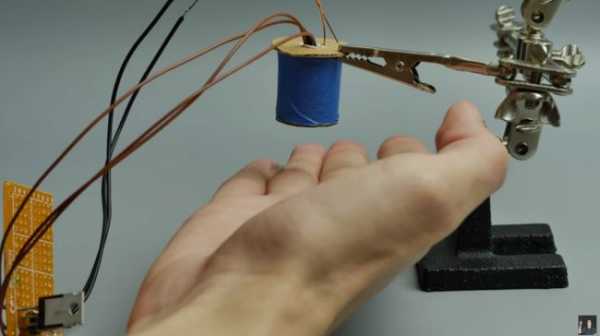
Спаиваем всё по схеме, без каких-либо нюансов. Датчик Холла припаян к проводам, т.к. он будет помещён в катушку. Когда всё спаяете, поместите датчик в катушку, закрепите его, подвесьте катушку и подайте ток. Поднеся магнит, вы почувствуете, что он притягивается или отталкивается, в зависимости от полюса, и пытается зависнуть в воздухе, но неудачно.
Шаг 4: Настройка
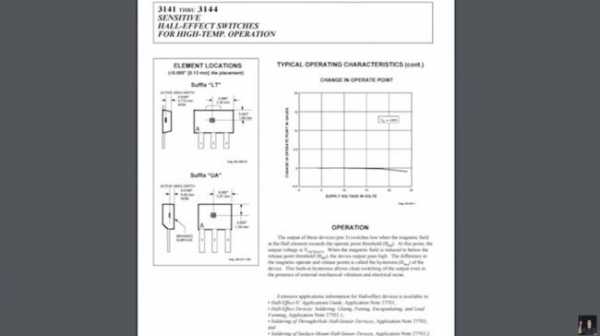
После 30 минут, потраченных над разгадкой вопроса, «почему эта штука не работает?», я пришел в отчаяние и прибегнул к крайним мерам — начал читать спецификацию к датчику, которую создают для таких людей как я. В спецификации имелись картинки, на которых было изображено, какая из сторон чувствительная.
Вытащив датчик и согнув его таким образом, чтобы плоская сторона с надписями была параллельна земле, я вернул его на место — самодельное устройство стало работать заметно лучше, но магнит всё ещё не левитировал. Понять в чём проблема удалось достаточно быстро: магнит в форме таблетки — не самый лучший экземпляр для левитации. Было достаточно сместить центр тяжести к нижней части магнита (я сделал это при помощи куска толстой бумаги ). Кстати, не забудьте проверить, какая сторона магнита притягивается к катушке. Теперь всё работало более или менее нормально и осталось закрепить и защитить датчик.
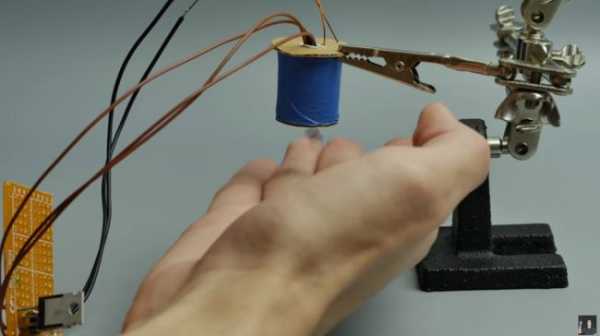
Какие еще нюансы есть в этом проекте? Сначала я хотел использовать адаптер на 12V, но электромагнит быстро грелся, и мне пришлось переключить его на 5V, я не заметил никаких ухудшений в работе, а нагрев был практически устранён. Диод и ограничивающий резистор были практически сразу отключены. Также я снял с катушки синюю бумагу — мотки медной проволоки смотрятся гораздо красивее.
Шаг 5: Финал
masterclub.online
Как самому собрать аналоговый левитрон / Habr
0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:
2.Фунциональная схема

Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.
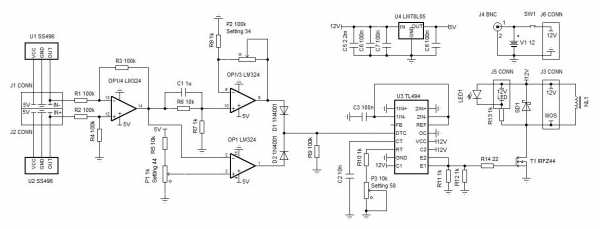
4.Принципиальная схема

Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
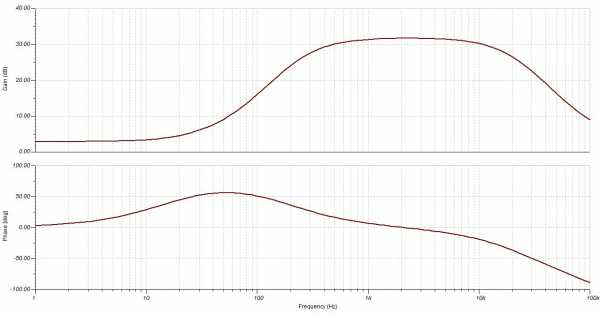
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.


5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:


7. Дисклаймер
Я не электронщик и не писатель, просто решил поделиться опытом. Может что-то покажется вам слишком очевидным, а что-то слишком сложным, а о чем-то забыл упомянуть вообще. Не стесняйтесь вносить конструктивные предложения и по тексту и по улучшению схемы, чтобы люди могли запросто это повторить, если будет такое желание.
habr.com
Самодельный Левитрон
Когда-то из каких-то хороших, но разрушенных компьютерных колонок ко мне попала микросхема TDA1552Q. Ознакомившись с даташитом (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf), я отложил ее «до лучших времен». Но недавно в Интернете мне случайно попалось слово «Левитрон» и множество изображений рекламного характера. Мозг быстро отбросил простые «волчки» и подвесные конструкции, остались «платформы» и вопрос: а получится ли у меня сделать нечто похожее, да еще и из хлама? Скажу сразу – получилось. Предлагаемая статья не только о том, как сделан левитрон (в Интернете хватает примеров), но и о том, как его настроить (чего я не нашел вовсе).
Сразу хочется поблагодарить участников форума РадиоКот, наполнивших сообщениями длинную ветку о левитроне, а также неизвестного автора схемы и чертежа. Особая благодарность – Barry Hansen за статью, которая для моего мозга стала мощным катализатором в работе над левитроном, хотя она посвящена подвесной, а не платформенной конструкции. Статья написана простым английским языком, с легким юмором и объяснениями, доступными даже школьнику.
Ссылки в благодарностях приведены не случайно, а рекомендованы для ознакомления всем желающим попробовать свои силы в конструировании левитронов.
Коротенькое видео:
Немного теории
Начнем, пожалуй, с механической схемы платформенного левитрона, сложившейся в моем понимании. Магнит, который парит над платформой, я буду здесь для краткости называть словом «фишка».
Эскиз платформы левитрона (сверху) изображен на рис. 1.
 Рис. 1
Рис. 1На рис. 2 – силовая схема вертикального разреза по центральной оси платформы (как я ее себе представляю) в состоянии покоя и без тока в катушках. Все хорошо, кроме того, что состояние покоя в такой системе нестабильно. Фишка стремится сместиться с вертикальной оси системы и с силой шлепнуться на один из магнитов. При «ощупывании» фишкой пространства над магнитами ощущается силовой «горб» над центром платформы с вершиной, лежащей на центральной оси.
 Рис. 2
Рис. 2 mg – вес фишки,
F1 и F2 – силы взаимодействия фишки с магнитами платформы,
Fmag – суммарное воздействие, уравновешивающее вес фишки,
ДХ – датчики Холла.
На рис. 3. изображено взаимодействие фишки с катушками (опять же, по моему понятию), а остальные силы – опущены.
 Рис. 3.
Рис. 3.Из рисунка 3 видно, что цель управления катушками – создать горизонтальную силу Fss, направленную всегда к оси равновесия при возникновении смещения Х. Для этого достаточно включить катушки так, чтобы одинаковый ток в них создавал магнитное поле противоположного направления. Остался пустяк: измерить смещение фишки от оси (величину Х) и определить направление этого смещения с помошью датчиков Холла, а потом пропустить в катушках подходящей силы токи.
Простой повтор электронных схем – не в наших традициях, тем более, что:
— нет в наличии двух TDA2030A, а есть TDA1552Q;
— нет датчиков Холла SS496 (доступны примерно по $2 за штуку), а есть датчики, похожие на HW101, по 3 шт даром в каждом двигателе диска CD- или DVD-драйва;
— лень возиться с двуполярным питанием.
Даташиты:
SS496 — http://sccatalog.honeywell.com/pdbdownload/images/ss496.series.chart.1.pdf
HW101- http://www.alldatasheet.com/datasheet-pdf/pdf/143838/ETC1/HW101A.html
Схема представляет собой два идентичных усилительных канала с дифференциальными входами и мостовыми выходами. На рис. 4 приведена полностью схема только одного канала усиления. Использованы микросхемы LM358 (http://www.ti.com/lit/ds/symlink/lm158-n.pdf) и TDA1552Q (http://www.nxp.com/documents/data_sheet/TDA1552Q_CNV.pdf).
 Рис. 4.
Рис. 4.На вход каждого канала подключена пара датчиков Холла так, чтобы подать на усилитель разностный сигнал. Выходы датчиков включены встречно. Это значит, что, когда пара датчиков находится в магнитном поле с одинаковой напряженностью, с нее на вход усилителя поступает нулевое разностное напряжение.
Балансировочные резисторы R10 взяты многооборотные, старые, советские.
В попытках выжать из усилителя достаточно высокий коэффициент усиления, я получил банальное самовозбуждение, предположительно, из-за бардака на монтажной плате. Вместо «уборки» в схему введены частотнозависимые RС-цепочки R15C2; они не обязательны. Если все же пришлось их установить, то сопротивление R15 нужно подобрать наибольшим, при котором самовозбуждение гаснет.
Питание всего устройства — адаптер (импульсный) на 12В 1,2А, перенастроенный на 15В. Энергопотребление в нормальном состоянии (с выключенным вентилятором) в итоге оказалось вполне скромным: 210-220 мА.
Конструкция
В качестве корпуса выбран кожух дисковода 3,5”, что приблизительно соответствует габаритам прототипов. Для горизонтирования платформы
ножки сделаны из винтов М3.
В верхней части корпуса вырезано фигурное отверстие, хорошо видимое на рис.5. Впоследствии оно закрыто декоративной зеркальной пластиной из хромированной латуни, закрепленной винтиками от винчестеров.
 Рис. 5.
Рис. 5.1 – места установки магнитов (снизу) и индикаторов баланса (опционально)
2 – «полюсные наконечники» катушек
3 – датчики Холла
4 – светодиоды подсветки (опционально)
Датчики Холла расположены в отверстиях стеклотекстолитового основания платформы и распаяны на разогнутых ножках разъемов (не знаю типа). Разъемы выглядели как на рис.6.
 Рис. 6.
Рис. 6.Датчики выпаяны из двигателей CD- или DVD-привода. Там они расположены под краем ротора и хорошо видны на рис.7. На один канал нужно брать пару датчиков из одного двигателя – так они будут наиболее одинаковыми. Выпаянные датчики – на рис.8.
 Рис. 7.
Рис. 7. Рис. 8.
Рис. 8.Для катушек были куплены пластмассовые шпули для швейных машинок, но на них оказалось мало места для обмотки. Тогда от шпуль были отрезаны щечки и приклеены на отрезки тонкостенной латунной трубки наружным диаметром 6мм и длиной 14мм. Трубка раньше была сегментом телескопической стержневой антенны. На четырех таких каркасах проводом 0,3 мм намотаны обмотки «почти послойно» (без фанатизма!) до заполнения. Сопротивление выровнено на 13 Ом.
Магниты – прямоугольные 20х10х5 мм и дисковые диаметром 25 и 30 мм толщиной 4 мм (рис.9) – пришлось все-таки купить… Прямоугольные магниты установлены под основанием платформы, а из дисковых сделаны фишки.
 Рис. 9.
Рис. 9.Вид устройства снизу и сзади (вверх дном) – на рис. 10 и 11 (легенда одна на оба рисунка). Бардак, конечно, живописный…
Микросхема U2 TDA1552Q (3) размещена на теплоотводе (9), который раньше работал на видеокарте. Сам радиатор закреплен винтами на отогнутых частях верхней крышки корпуса. На радиаторе (9) закреплены также гнездо питания (1), контрольные гнезда (2) и узел терморегулирования (5).
Кусок стеклотекстолита, который раньше был клавиатурой, служит основанием платформы. Катушки (7) закреплены на основании винтами М4 и гайками. На нем же с помощью хомутов и саморезов укреплены магниты (6).
Контрольные гнезда (2) сделаны из компьютерного разъема питания и закреплены сзади устройства вблизи балансировочных резисторов (10) так, что легко доступны без разборки. Подключены гнезда, естественно, к выходам обоих каналов усилителя.
Схема предусилителя и его стабилизатора питания, включая балансировочные резисторы (10), смонтирована на макетной плате и в результате наладки превратилась в живописный свинарничек, от макрофотографирования которого пришлось воздержаться.
 Рис.10.
Рис.10. Рис.11.
Рис.11.1 – крепление гнезда питания
2 – контрольные гнезда
3 – TDA1552Q
4 – выключатель питания
5 – узел терморегулирования
6 – магниты под хомутиками
7 – катушки
8 – магнитные шунты
9 – теплоотвод
10 – балансировочные резисторы
Наладка
Выставление нулей на выходах обоих каналов при каждом отладочном включении – обязательно. Можно без фанатизма: +–20 мВ – вполне приемлемая точность. Возможно некоторое взаимовлияние между каналами, так что при значительном начальном отклонении (больше 1-1.5 вольт по выходу канала) выставление нулей лучше сделать дважды. Стоит помнить, что при железном корпусе баланс разобранного и собранного устройства – это две большие разницы.
Проверка фазировки каналов
Фишку нужно взять в руку и поместить над центром платформы включенного левитрона на высоте примерно 10-12мм. Каналы проверяются поочередно и раздельно. При смещении фишки рукой вдоль линии, соединяющей противоположные от центра датчики, рука должна чувствовать заметное сопротивление, создаваемое магнитным полем катушек. Если сопротивления не чувствуется, а руку с фишкой «сносит» от оси, нужно поменять местами провода с выхода проверяемого канала.
Настройка положения парящей фишки
На видеороликах о самодельных платформенных левитронах нередко можно видеть, что фишка парит в наклонном положении, даже если сделана на базе дисковых магнитов, то есть, достаточно хорошо симметрирована. Не обошлось без перекоса и в описываемой конструкции. Возможно, в этом виноват металлический корпус…
Первая мысль: сместить вниз магниты с той стороны, где фишку излишне «подпирает».
Вторая мысль: сместить дальше от центра магниты с той стороны, где фишку излишне «подпирает».
Третья мысль: если магниты смещать, то магнитной ось системы постоянных магнитов платформы перекосится относительно магнитной оси системы катушек, из-за чего поведение фишки станет непредсказуемым (особенно при разном ее весе).
Четвертая мысль: сделать сильнее магниты с той стороны, куда наклонена фишка – была отброшена как несбыточная, потому что широкого ассортимента магнитов для подгонки негде было взять.
Пятая мысль: сделать слабее магниты с той стороны, где фишку излишне «подпирает» – оказалась удачной. Более того, достаточно простой в реализации. Магнит, как источник магнитного поля, можно шунтировать, то есть, закоротить часть магнитного потока, так что в окружающем пространстве магнитное поле станет немного слабее. В качестве магнитных шунтов были применены маленькие ферритовые кольца (10х6х3, 8х4х2 и т.д.), бесплатно выковырянные из дохлых ламп-экономок (8 на рис.10). Эти кольца нужно просто примагнитить к слишком сильному магниту (или двум-трем) с той их стороны, что дальше от центра платформы. Оказалось, что подбирая количество и размеры шунтов для каждого «слишком сильного» магнита, можно достаточно точно отгоризонтировать положение парящей симметричной фишки. Не забывайте выполнить электрическую балансировку после каждого изменения в магнитной системе!
Опции
К опциям относятся: индикаторы разбаланса усилителя, узел терморегулирования, подсветка и регулируемые ножки платформы.
Индикаторы разбаланса усилителя – две пары светодиодов, расположенные на тех же радиусах, что и датчики, в толще стеклотекстолитового основания платформы (1 на рис. 5). Светодиоды, очень маленькие и плоские, раньше работали в каком-то модеме, но подойдут и от старой мобилки (в SMD исполнении). Светодиоды утоплены в отверстиях, так как фишка, срываясь из центра, шлепается на ближайший магнит и вполне способна разрушить светодиод.
Схема индикатора для одного канала – на рис. 12. Светодиоды должны быть с рабочим напряжением 1,1-1,2 В, т.е. простенькие красные, оранжевые, желтые. При более высоких напряжениях LED-ов (2,9-3,3 В для сверхъярких) следует пересчитать количество диодов в цепочке D3-D6 для сведения к минимуму «мертвой зоны» – минимального напряжения на выходе канала, при котором ни один из светодиодов не светится.
 Рис. 12.
Рис. 12.Я расположил индикаторы так, чтобы светился тот, в сторону которого фишка смещена от центра. Индикаторы помогают легко повесить фишку над левитроном, а также горизонтировать платформу. В нормальном состоянии все они погашены.
Схема узла терморегулирования – на рис. 13. Его назначение – не дать оконечному усилителю перегреться. На выходе термоузла включен вентилятор 50х50 мм 12В 0,13А от компьютера.
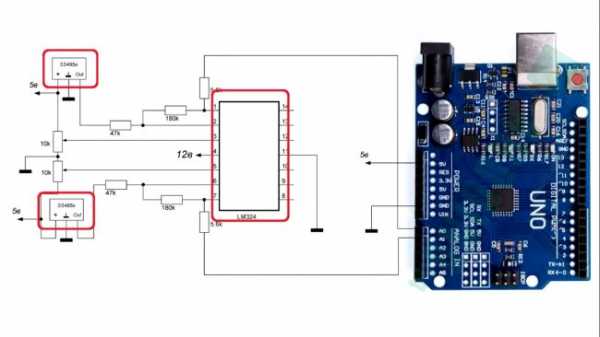 Рис. 13.
Рис. 13.В схеме термоузла легко узнать немного измененный триггер Шмитта. Вместо первого транзистора использована микросхема TL431. Тип транзистора Q1 указан условно – я воткнул первый попавшийся NPN, способный выдержать рабочий ток вентилятора. В качестве термодатчика использован терморезистор, найденный на старой материнской плате в процессорном сокете. Термодатчик приклеен на радиатор оконечного усилителя. Подбором резистора R1 можно отрегулировать термоузел на срабатывание при температуре 50-60С. Резистор R5 совместно с коллекторным током Q1 определяет величину гистерезиса схемы относительно напряжения на управляющем входе U1.
В схеме на рис. 13 резистор R7 введен для снижения напряжения на вентиляторе и, соответственно, шума от него.
На рис. 14 видно, как вентилятор врезан в нижнюю крышку корпуса.
 Рис. 14.
Рис. 14.Другой способ применения термоузла – подключение к управляющему выводу MUTE микросхемы оконечного усилителя (рис. 15). Величина указанного на схеме номинала R5 предполагает подключение MUTE (вывода 11 микросхемы U2 по рис. 4) к питанию через резистор 1кОм (НЕ напрямую, как в даташите!). Вентилятор в таком случае не нужен. Правда, при подаче сигнала MUTE на усилитель фишка падает, и после снятия сигнала MUTE сама (почему-то?) не взлетает.
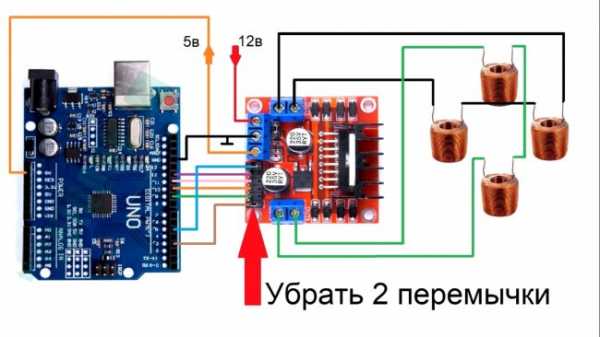 Рис. 15.
Рис. 15.Подсветка – 4 ярких светодиода диаметром 3мм, расположенные наклонно к центру в отверстиях основания платформы и декоративной пластины в тех местах, куда фишка не падает. Они включены последовательно и через резистор 150 Ом – к цепи общего питания устройства 15В.
Заключение
Грузоподъемность
Чтоб «добить» тему, сняты «грузовые характеристики» левитрона с фишками 25 и 30 мм диаметром. Грузовыми характеристиками я тут назвал зависимость высоты парения фишки над платформой (от декоративной пластины) от суммарного веса фишки.
Для фишки с магнитом 25 мм и общим весом 19г максимальная высота составила 16мм, а минимальная – 8 мм при весе 38г. Между этими точками характеристика практически линейная. Для фишки с магнитом 30 мм грузовая характеристика оказалась между точками 16 мм при 24г и 8 мм при 48г.
С высоты ниже 8 мм от платформы фишка падает, притягиваясь к железным сердечникам катушек.
НЕ делай, как я!
Во-первых, не стоит экономить на датчиках. «Голые» датчики Холла, вынутые попарно для каждого канала из двух двигателей (то есть, практически одинаковые!) – все равно проявляют свой безобразно большой температурный коэффициент сопротивления. Даже при одинаковых цепях питания и встречно-разностном включении выходов датчиков, можно получить заметное смещение нуля на выходе канала при изменении температуры. Интегральные датчики SS496 (SS495) имеют не только встроенный усилитель, но и термостабилизацию. Внутренний усилитель датчиков позволит сделать существенно выше общий коэффициент усиления каналов, да и схема их питания выходит попроще.
Во-вторых, следует, по возможности, воздержаться от размещения левитрона в железном корпусе.
В-третьих, двуполярное питание все-таки предпочтительнее, потому что управление коэффициентом усиления и юстировкой нулей получаются проще.
Спасибо за внимание!
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!
mozgochiny.ru
Левитрон на датчике Холла своими руками
Доброго времени суток, уважаемые самоделкины.В этой статье Константин, мастерская How-todo, покажет нам как сделать левитрон.

Итак, левитрон. Принцип работы данной приблуды прост, как саморез. Электромагнитом поднимаем в воздух кусочек некоего магнитного материала. Для создания эффекта парения, электромагнит включаем и выключаем с большой частотой.
То-есть, как-бы поднимаем и бросаем магнитный образец.
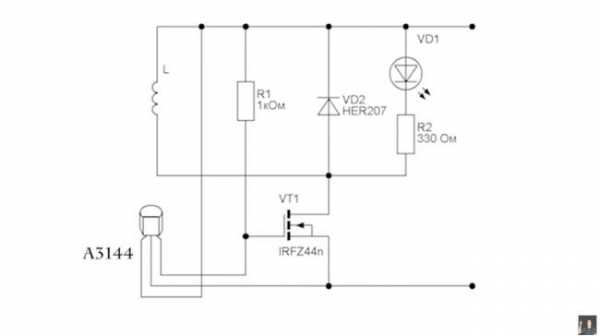
Схема такого устройства на удивление проста, и повторить его не составляет сложностей. Вот, собственно, схема.

Нужные нам материалы и компоненты.

Светодиод любого цвета, он не обязателен.
Транзистор IRFZ44N, подойдет практически любой похожий по параметрам полевик.
Диод, здесь автор использует HER207, с тем же успехом будет работать какой-нибудь 1N4007.
Резисторы на 1 кОм и 330Ом (последний не обязателен).
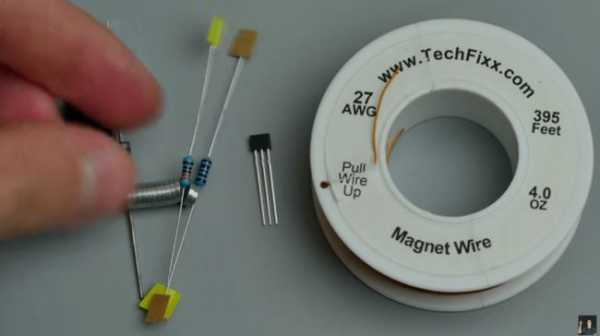
Датчик холла, у меня это A3144 его тоже можно заменить на похожий.
Медный намоточный эмалированный провод диаметром 0,3 0,4 мм, метров 20. У автора провод 0,36 мм.

Неодимовый магнитик типа таблетки, размером 5 на 1 мм, тоже не особо принципиально, в пределах разумного.

В качестве источника питания подойдет ненужный пятивольтовый зарядник от телефона.

Клей, бумага, паяльник припой… стандартный набор паяльщика.
Кстати, список всех компонентов с ссылками на aliexpress.
Давайте перейдем к сборке. Для начала необходимо сделать картонную катушку для корпуса будущего электромагнита.
Параметры катушки следующие:
6 мм диаметр внутренней втулки, ширина слоя намотки приблизительно 23 мм и диаметр щечек, с запасом, около 25 мм.

Как видите, Константин соорудил корпус для катушки из картонки и обрезка тетрадного листа, хорошенько смазав их суперклеем.
Закрепим начало провода в каркасе, наберемся терпения и начинаем накручивать примерно 550 витков.

Направление намотки не имеет значения. Можно даже намотать в навал, но это не наш метод.

Наматываем 12 слоев, виток к витку, изолируя каждый слой изолентой.

Потратив часа полтора, закрепляем конец провода и откладываем катушку.

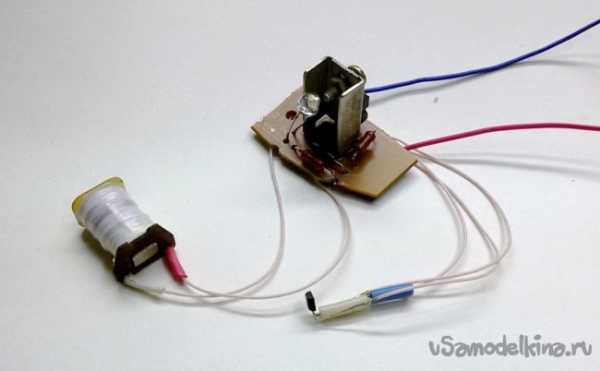
Приступаем к пайке, все согласно схемы, без каких-либо отличий.
Выводы Датчика Холла удлинняем проводками и изолируем термоусадкой, ведь его необходимо расположить внутри катушки.


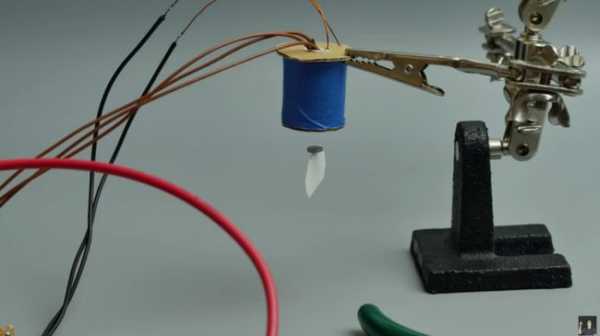
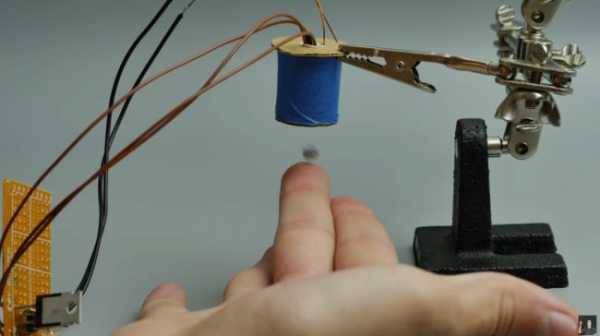
Собственно все, остается только настроить, для этого устанавливаем датчик Холла внутри катушки и фиксируем подручными средствами.

Подвешиваем катушку, подаём питание.

Поднеся магнит чувствуем, что он притягивается или отталкивается, в зависимости от полярности.
На некотором расстоянии магнит пытается зависнуть, но на длительное время не зависает.

Изучаем документацию на датчик, где специально в картинках показано, с какой стороны у него чувствительная зона.

Вынимаем его и сгибаем таким образом, чтобы плоская сторона с надписями оказалась в итоге параллельно земле.

Запихиваем обратно, на этот раз все значительно лучше.

Но до сих пор не парит.

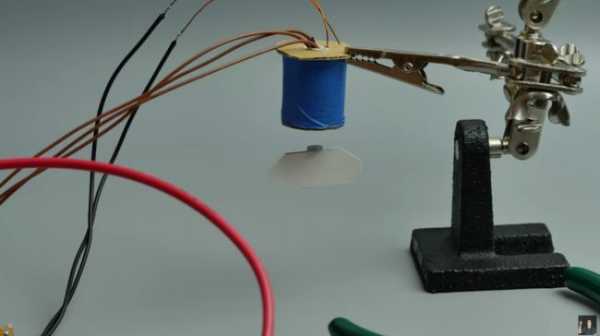
Проблема заключается в форме магнита, а именно — плоская форма «таблетки».
Не самая удачная, которую можно придумать для левитации. Достаточно всего лишь сместить центр тяжести вниз. Организуем это при помощи куска толстой бумажки.

Кстати, перед приклеиванием противовеса, не забудьте сначала посмотреть с какой стороны магнит притягивается к катушке.

Собственного теперь все более-менее работает, остается только отцентровать и закрепить датчик.

Какие еще были особенности. Попытка питать устройство от 12В адаптера приводит к сильному нагреву электромагнита.
Пришлось перейти на 5В, при этом какого-то ухудшения работы замечено не было, а нагрев практически полностью был устранен.
Еще светодиод и его ограничительный резистор почти сразу был исключен из схемы, ибо смысла от них нет.
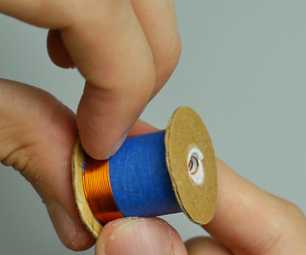
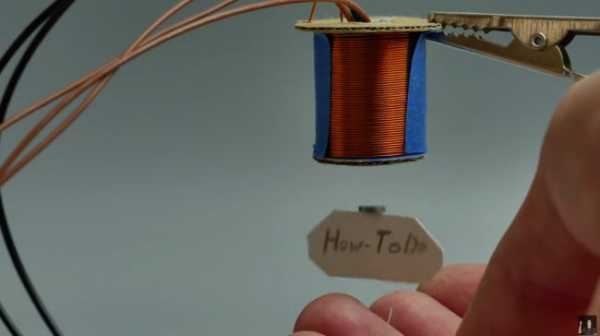
Финальный штрих, синий бумажный скотч показался недостаточно эстетичным.

Отодрав его, медный провод виток к витку выглядит значительно лучше.

Для своих поделок, левитрон первый в списке однозначно, по эффектности и простоте схемы он может потягаться с катушкой Тесла.
Для Вас левитрон изготовил и представил его принцип работы Константин, канал How-todo.
Всем хороших идей!
Источник
 Доставка новых самоделок на почту
Доставка новых самоделок на почтуПолучайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Левитрон с управляемым подвесом своими руками
Данная самоделка представляет собой Левитрон с управляемым подвесом. Конструкция и схема достаточно просты, так что собрать её будет под силам даже не очень опытному радиолюбителю и любителю самоделок. В статье описана пошаговая инструкция сборки левитрона, следуя её, проблем с работоспособностью возникнуть не должно!
Схема левитрона

Что нужно для изготовления левитрона
- Транзистор IRF740A [Купить недорого]
- Мультиплексор IN74LS157N
- Датчик Холла SS443A [Купить недорого]
- Диод 1N4007 [Купить недорого]
- Светодиод 12V [Купить недорого]
- Резисторы [Купить недорого]
- Переключатель (Не включатель!!)
- Монтажная плата [Купить недорого]
- Обмоточный провод ∅ 0.4 мм
- Неодимовые магниты разных размеров [Купить недорого]
- Блок питания 5V 3A [Купить недорого]
- Фанера и тонкий пластик
Изготовление Левитрона
Первым делом необходимо собрать корпус куда будет монтироваться вся схема, в том числе и катушка. Корпус можно изготовить по схеме ниже либо придумать свой вариант.

Первым делом из фанеры вырезаем все детали нижнего основания и при помощи клея ПВА собираем его.
Затем выпиливаем элементы стоек и так же с помощью клея склеиваем их.
Далее устанавливаем стойки на основание используя клей, как показано на фото ниже.
Далее из тонкого пластика нужно вырезать заглушку для основания корпуса и при помощи супер клея приклеить её.

После того как корпус собран, можно покрасить его в любой цвет, так он станет однотонным и привлекательным на вид, но это не обязательно конечно.

Далее переходим непосредственно к сборке схемы.
Перед сборкой схемы необходимо установить монтажную плату в корпус используя прокладку. Прокладка нужна для того, что бы обеспечить расстояние между корпусом и платой, что бы ножки деталей полностью заходили в отверстия и не возникало проблем при монтаже.
Далее просверливаем два отверстия в верхней части корпуса и в боковой, в них будут продеваться монтажные провода.


Затем вырезаем деталь где делаем отверстия для светодиода и переключателя. Эта деталь будет случить креплением для катушки.

При помощи супер клея, устанавливаем эту деталь на стойку.

Далее необходимо намотать катушку. Для её расчёта нужно использовать программу Coil32, только с помощью этой программы можно добиться максимальных показателей.
Теперь необходимо подобрать стержень, его диаметр должен составлять 10 мм.
Далее отрезаем кусок бумаги от листа А4, проклеиваем его и накручиваем на стержень для для того, что бы получить прочное основание с соответствующим внутренним диаметром.

Затем вырезаем пластиковые стенки диаметром 45 мм.

Далее надеваем стенки на стержень так, что бы расстояние между ними составляло 30 мм.
С помощью супер клея промазываем внешние края стенок и основания для из фиксации.

Аккуратно продеваем провод.
И далее наматываем 1750 витков.

Обрезаем провод с запасом, делаем надрез на стенке, укладываем туда конец провода и термоклеем фиксируем него, для того что бы избежать распускания.


Затем с помощью лезвия убираем все неровности.

Наша катушка готова. Теперь при помощи супер клея устанавливаем её на корпус, как на фото ниже.


Далее припаиваем все детали и провода схемы на монтажную плату. Обратите внимание что переключатель и светодиод устанавливаются не на плату а на корпус.
Далее укладываем продеваем все провода в заранее подготовленные отверстия.
Затем устанавливаем на корпус переключатель и светодиод и сразу же их припаиваем к отведенным для них проводам.


Затем припаиваем провода катушки и датчики холла. Длина проводов датчиков холла должна быть достаточной что бы достать до конца катушки.
Затем сгибаем датчики холла областью сенсора наружу.
Теперь при помощь изоленты крепим датчики как показано на рисунке ниже. Такой способ крепления в будущем, позволит без проблем менять расстояние между сенсорами. Дополнительно необходимо зафиксировать датчики с помощью канцелярских резинок.

Затем продеваем датчики в отверстие катушки и центруем их. Для этих целей и надевалась дополнительно канцелярская резинка.

При помощи пластиковых хомутов фиксируем все провода.

Теперь наш левитрон готов к эксплуатации!


Испытание Левитрона
Подключаем блок питания.
Меняя расстояние между датчиками, мы так же меняем длину хода подвеса.

Всё что остаётся сделать, это поместить магнит в зону датчика и наслаждаться чудесами левитации! ))

Видео самоделки — Левитрон с управляемым подвесом
Похожее
kavmaster.ru
