Контроллер шагового двигателя схема | kavmaster
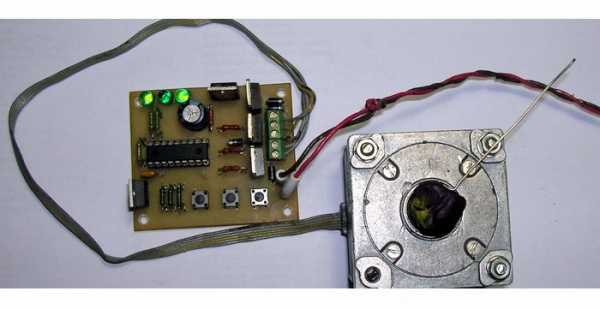
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
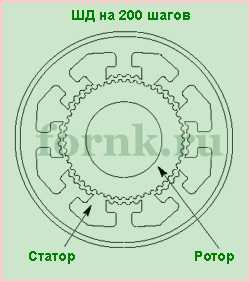
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
Схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
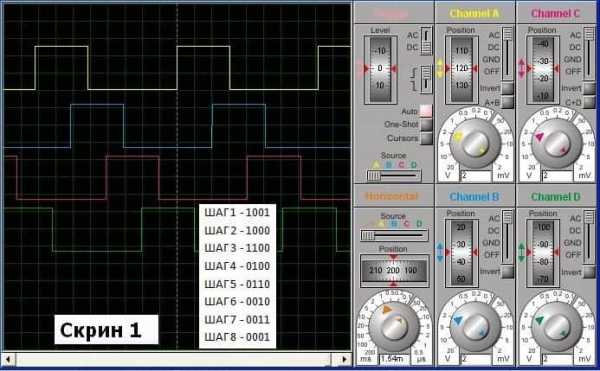
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
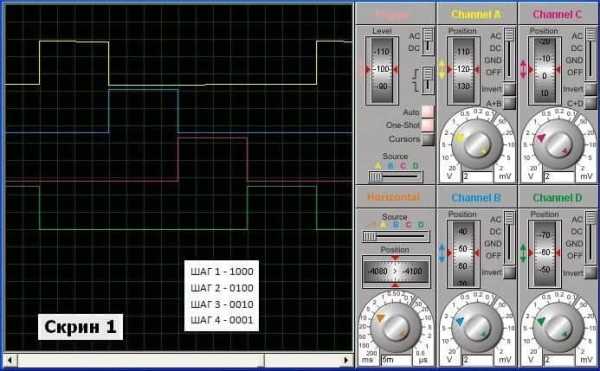
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
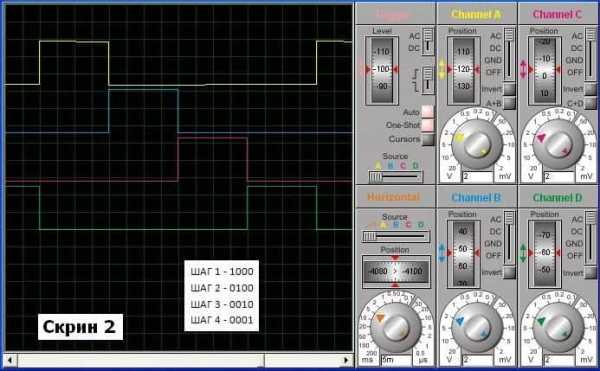
Полношаговый алгоритм работы шагового двигателя
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
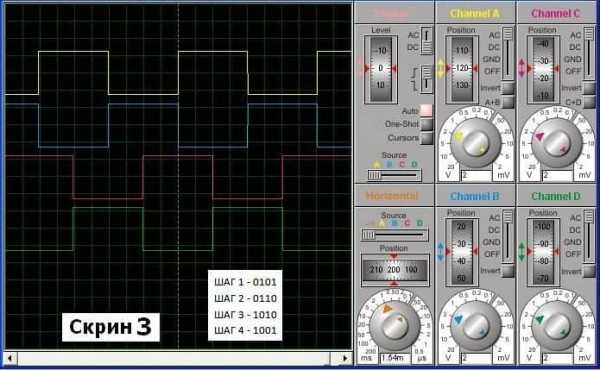
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.
Купить USB программатор PIC K150 ICSP
Источник: http://www.kondratev-v.ru
Похожее
kavmaster.ru
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
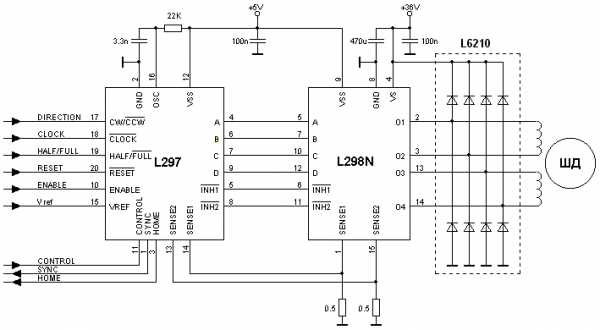 |
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
easyelectronics.ru
Управление шаговым двигателем. Схема и описание
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами

Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением

В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель
Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.
Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
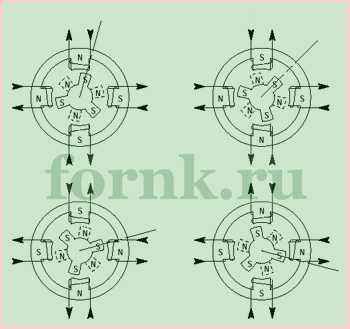
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
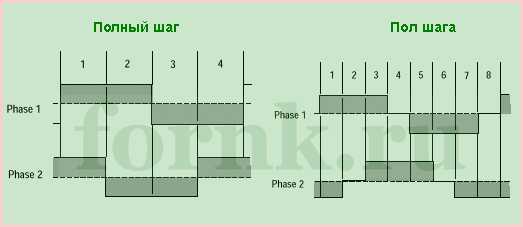
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
 Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.
Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
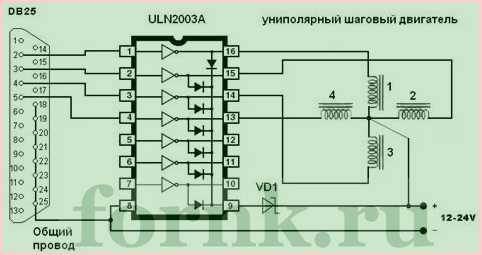 Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
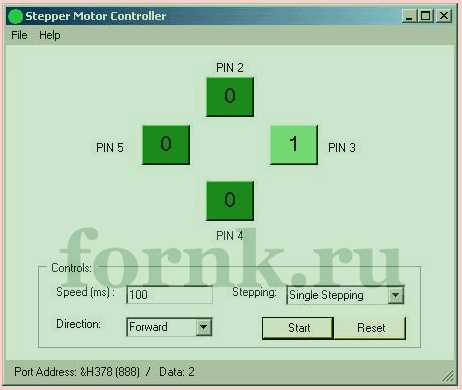
Скачать программу управления шаговым двигателем (скачено: 1 851)
fornk.ru
Простая схема управления шаговым двигателем
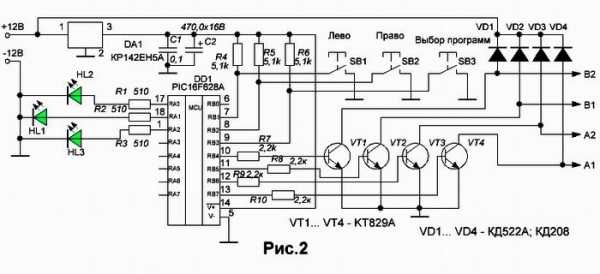
Опубликовал admin | Дата 10 января, 2014Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя. Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины. В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью.
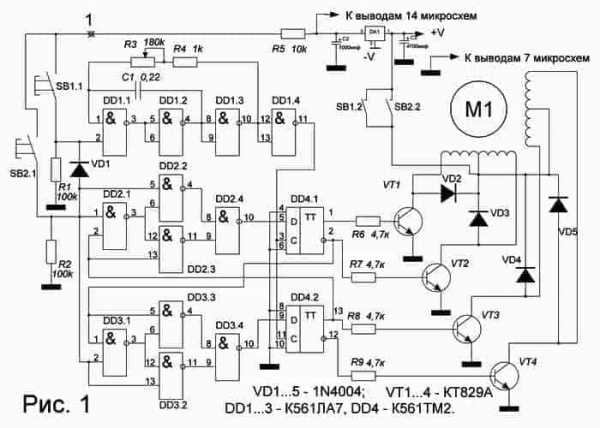
На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения. Микросхемы питаются через стабилизатор напряжения DA1 — КР142ЕН8Б. Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В.
Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.
Скачать “простая схема управления шаговым двигателем” Shema-upravl-shagov-dvigatel.rar – Загружено 1844 раза – 31 KB
Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы».
Просмотров:35 120
www.kondratev-v.ru
Управление униполярными шаговыми двигателями — Меандр — занимательная электроника
В статье рассматриваются практические решения для управления униполярными шаговыми двигателями. Рассматриваемые решения могут быть легко использованы на практике для различных приложений. В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
Напомню, что основное свойство шагового двигателя в отличие от других типов электродвигателей как переменного, так и постоянного тока является то, что сдвиг его ротора осуществляется на заданный его конструкцией шаг (чаще это угол, реже — линейное смещение) при подаче на его обмотки импульсов напряжения. В этом он похож на шаговое реле, известное еще с XIX века. Его нельзя путать и с многофазными двигателями. Формально шаговые двигатели относятся к двигателям постоянного тока, но они не имеют коллектора (поэтому надежность их выше и помех от них значительно меньше). Для создания момента вращения в этих двигателях, в отличие от коллекторных двигателей постоянного тока, требуется внешнее импульсное управление обмотками, которые расположены не на роторе (который представляет собой постоянный магнит), а на статоре. Другими словами, если вы подадите на обмотку такого двигателя постоянное напряжения, то вращения ротора не будет. Нужно специальное устройство управления — коммутатор. В этом они проигрывают традиционным коллекторным двигателям постоянного тока. Но зато они выигрывают в большем моменте на малых и сверхмалых скоростях вращения, поэтому во многих применениях им не нужен редуктор. Кроме того, они обеспечивают без специальных конструктивных или схемных ухищрений точное позиционирование ротора и торможение, так как обладают не только моментом вращения, но и моментом удержания, который по величине выше момента вращения.
Имеются шаговые двигатели не только традиционного исполнения с вращающимся ротором, но и с его линейным перемещением. В последнем случае на один управляющий импульс происходит линейное смещение ротора на строго заданную конструкцией двигателя величину (подробности см. в [1]). Еще одно важное замечание: шаговый двигатель, в отличие от коллекторного, при стопорении ротора не увеличивает потребление энергии.
Конструкция двигателя
Шаговые двигатели различаются, как по конструктивному исполнению, так и по конфигурации соединения их обмоток. Исполнение двигателей в части обмоток может быть биполярное и униполярное. Основное преимущество униполярных шаговых двигателей заключается в простоте их систем управления, но они имеют меньший момент вращения [1]. На рис.1,а показано «классическое» исполнение включения обмоток, а на рис.1,б — универсальное с расщепленными обмотками, которое позволяет включать двигатель, как в униполярном, так и в биполярном вариантах. Кроме того, в «классическом исполнении» в некоторых типах двигателей средние выводы обмоток (выводы АВ, CD на рис.1,а) могут быть конструктивно объединены внутри самого двигателя (такой вариант как раз показан на фото в начале статьи). Так что если вам попался в руки неизвестный шаговый двигатель, то по количеству выводов вы относительно легко сможете его идентифицировать. Двигатели с шестью и пятью выводами будут гарантировано униполярными. Остается только оп разделить фазировку обмоток. К сожалению, это можно будет сделать только экспериментально. Какой-либо стандартизации по цвету проводов пока нет.
Рис. 1
Конфигурация обмоток униполярных шаговых двигателей и двигателей с расщепленными обмотками в униполярном включении позволяет обойтись без сложных драйверов и дорогостоящих ИМС. Кроме того, классические униполярные двигатели дешевле, так как, в основном, этот тип включения обмоток характерен для двигателей на постоянных магнитах с шагом 18° или 7,5°. Дробление такого большого шага осуществляется, как правило, дополнительным редуктором, который может быть конструктивно совмещен с двигателем [2].
Схема управления униполярного шагового двигателя с универсальным коммутатором
Практическое решение для управления униполярным шаговым двигателем потребовалось автору при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, то схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов, достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая годится для самых различных применений, показан на рис.2.
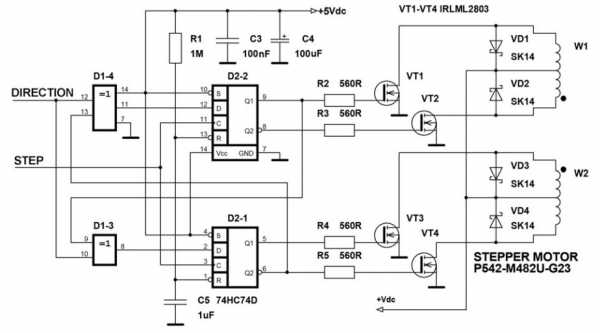
Рис. 2
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «STEP» («Шаг»), необходимое направление вращения устанавливается через вход «DIRECTION» («Направление вращения»). Оба эти сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис.2 они не показаны). Временная диаграмма работы коммутатора (рис2) показана на рис.3, где верхние две трассы — Q1 D2-2, 02 D2-2; нижние две трассы — Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз.
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис.3).
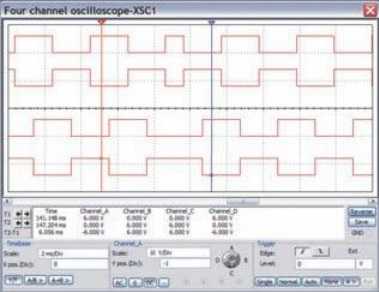
Рис. 3
Схема управления шаговым двигателем без реверса
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (рис.4), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая показана на рис.3 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
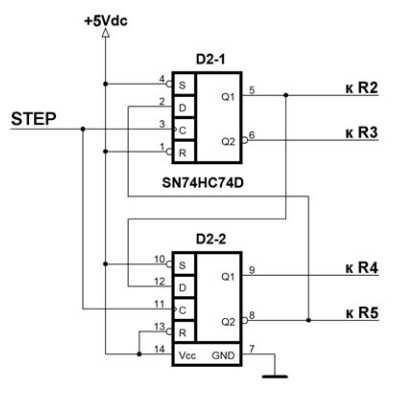
Рис. 4
Схема управления с режимами удержания и выключения
Управление моментом вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использовался импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4], хотя за время, прошедшее со времени публикации, в этот on-line калькулятор высокого уровня и были внесены некоторые изменения, но основа осталась та же. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток. Это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте использовалась ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, режим удержания, осуществляется прекращением подачи напряжения с частотой коммутации (вход «STEP»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя показан на рис.5. Такая схема пригодна для запитки шаговых двигателей любого типа.
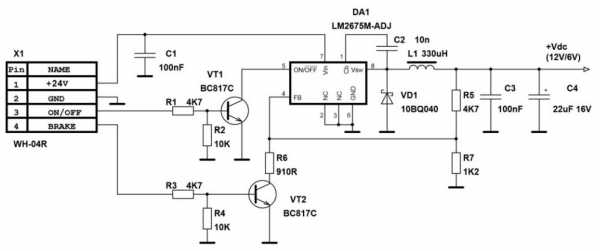
Рис. 5
Схема (рис.5) обеспечивает подачу двух стабильных напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором (25:6) равен 19,8 Н*см, а момент вращения всего 6 Н*см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше практически не отличаются. Основное преимущество этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 мА до 230 мА, то есть в 2 раза, а мощность в 4 раза, то есть с 5,52 Вт до 1,38 Вт.
Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема X1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости, выходы схемы управления можно подключить непосредственно вместо упомянутых ключей.
Примечание. В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автором использовалась катушка SDR1006-331К (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16…18 В, что не окажет никакого влияния на его функционирование. Еще раз обращаю внимание, что при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f=(300…500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит еще и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f*7,5°/360°=(6,25-10,5) об/с,
где 7,5° — это угол поворота ротора двигателя на один шаг управления.
Этот угол как раз и задан конструктивно в самом двигателе. Дальнейшее понижение частоты вращения зависит уже от редуктора.
Изменение частоты вращения двигателя
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого с целью компенсации уменьшения момента вращения неизбежного с ростом частоты применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions») задан для двух условий, а именно: для условия обозначенного как L/R и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 Гц вместо 300 Гц. Что это за условия?
Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для них не требуется подача напряжения, а требуется обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения
lmax=Vdc/R;
l(t)=lmax*(1-e—t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где:
L — индуктивность обмотки двигателя;
R — общее сопротивление в цепи обмотки.
Это сопротивление может быть как собственным активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из при веденной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорционально сопротивлению. Чем быстрее ток достигнет своего максимального уровня
lmax=Vdc/RL,
где Vdc — это номинальное напряжение запитки обмотки, a Rl — активное сопротивление в цепи обмотки, тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель установить (насколько это возможно быстро) ток в обмотке на уровне Vcd/RL.
Импульсное питание двигателя
Просто увеличить напряжение на двигателе выше номинального крайне не желательно, даже если вы уверенны в том, что ток в обмотках при выбранной скорости вращения ротора не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vcd лишь на некоторое время, которое в несколько раз меньше длительности импульса управления, но это потребует дополнительных ключей, поэтому этот способ используется крайне редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличение напряжения питания Vcd. Это и ускорит накопление тока в индуктивности и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот как раз на этот режим и «намекает» спецификация [2].
В классической теории используется режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки R1 и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4Vcd на добавочных резисторах при малых скоростях вращения, особенно при остановке двигателя, будет рассеиваться мощность:
PR=(3Vcd)2/3RL=(3*12)2/(3*52,4)=8,24 Вт.
Фактически, с учетом допустимого коэффициента нагрузки придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения крайне низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока.
В данном случае для управления биполярным двигателем был применен драйвер с встроенной функцией нарезки, так называемый, чоппинг (от английского термина «chopping» — нарезка). В чем суть этого метода? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс установления максимального тока обмоток, после достижения заданной величины тока, преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД несравненно выше. Сравнение методов управления током в обмотках двигателя показано на рис.6.
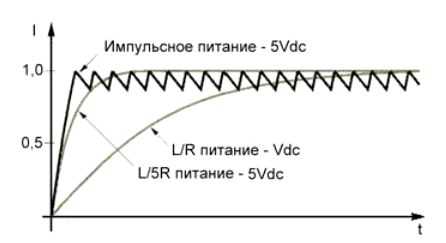
Рис. 6
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис.2). Назначение этих диодов — гасить э.д.с. самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, что и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае необходимо предусмотреть соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I=230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, самым оптимальным для управления коммутацией обмоток является использования подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте использовали транзисторы IRLML2803 с Rdc(on)=0,25 Ом, допустимой мощность рассеивания 540 мВ и постоянным током стока 0,93 А при температуре 70°С. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT<Rdc(on)*I2=0,25*(0,230)2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание. Когда речь идет о частоте вращения ротора шагового двигателя, то имеется ввиду именно вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются шаговые двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все необходимые параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
- Рентюк В. Шаговые двигатели и особенности их применения // Электрик. — 2012. — №11.
- Geared stepper motor Р542-М48 series, Mclennan Servo Supplies Ltd.mclennan.co.uk.
- Rentyuk V. Control stepper motors in both directions // — 2010. — March 18.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center // Электрик. — 2013. — №10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В.П., Маскимчук A.A., Ремнев A.M., Смердов В.Ю. Энциклопедия устройств на полевых транзисторах. — М.: СОЛОН-Р, 2002.
Автор: Владимир Рентюк, г. Запорожье, Украина
Возможно, вам это будет интересно:
meandr.org
Драйвер ШД на дискретных элементах / Блог им. B-Screw / Сообщество EasyElectronics.ru
Ну, с почином меня. Хочу познакомить народ с очередной моей попыткой сделать из г… пулю. Люблю я это дело, да и пули иногда неплохие получаются :).Короче, на этот раз прошибла меня идея сделать функциональный аналог микросхемы SLA7029M на рассыпухе, т.е. из подручного мусора. Внимательно изучив статью Ридико Л.И. «Контроллер ШД» (кто не читал — советую к прочтению), отобрал у сына (в аренду) макетку и начал ваять.
За основу была взята эта блок-схема ШИМ-стабилизатора тока обмоки из статьи: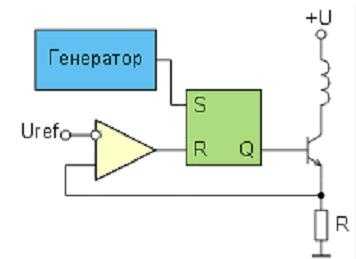
Все вроде как проще пареной репы и за вечер сваялась жуткая конструкция, она же макет (фото последнего варианта).
Схема (в текущем состоянии) 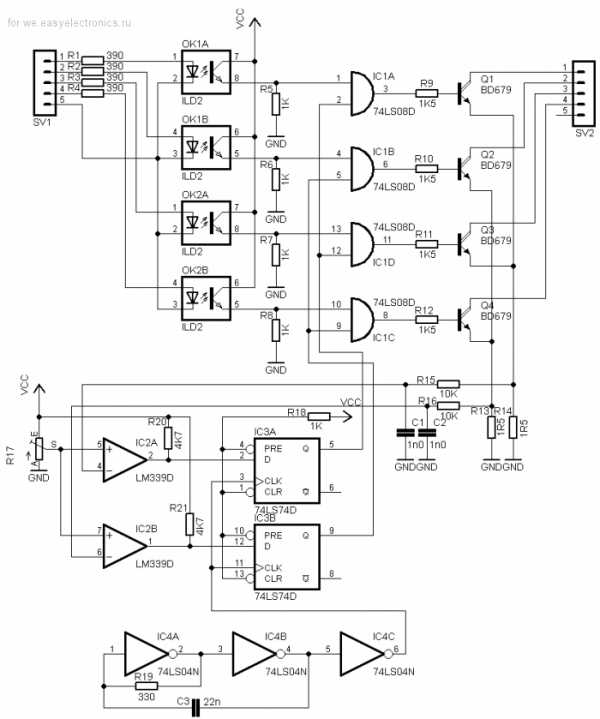
Она же в PDF
Подключение двигателя (двигатель униполярный) к разъему SV2: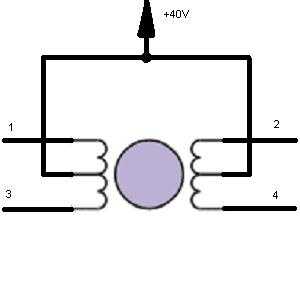
Слева на фото, на плате, заранее собранная интеллектуальная дрыгалка ногами с USB управлением. Сваял с помощью здешнего сообщества. Меги раньше не программировал и найти столько нужной для изучения предмета информации в одном месте было очень приятно. Через эту плату планирую в дальнейшем управлять движками. А еще может параллельный программатор сваяю. Для этого, собственно, я ее и выполнил отдельным модулем — что в данный момент нужно, к тому и подключил.
Со старта оказалось, что экономные китайцы, мать их, не ставят на материнские платы MOSFET-ов с максимальным напряжением сток-исток больше 25 вольт. А напряжение планируется порядка 40 вольт. Всё, MOSFET-ы с паленых материнок — в топку. В имеющемся мусоре наковырял биполярников KTD1937. Буду использовать их. На схеме указаны другие, просто у Eagle с подходящим футпринтом первый взял и вставил. Да и не важно, какой будет ключ. Главное, чтобы он полностью откывался TTL единицей. На макете вообще сборки STA371A. С оптронами, кстати, тоже самое. Любой транзисторный. В моем мусоре нашлись сдвоенные МСТ6.
До сборки ШИМ решил проверить опторазвязку и ключи. Движок дисководный, советский. Рабочее напряжение — 12 вольт. Уже на 24 вольтах его начало кошмарить — рывки жуткие, из за самоиндукции после каждого шага вал трясло, на определенных оборотах безбожно пропускал шаги, а то и в реверс уходил, причем обороты были далеко не максимальные. Просто медленнее — крутит, быстрее — крутит, а именно на этих оборотах — фиг. Ну и грелся как печка, что естественно.
Начал добавлять ШИМ. Генератор классический, на какой частоте завелся не мерял, главное что завелся. Грубо, где-то между 20 и 40 KHz. Это же, в конце концов, творение, а не изделие. Нужно оставить место бардаку :).
Дальше дело за компараторами. Рефренс на него подаем с делителя на R17. Для более плавной регулировки можно добавить постоянный резистор килоома на полтора между VCC и подстроечником, а сам подстроечник использовать на 470 ом. Датчики тока — R13, R14. ФНЧ содрал позамиствовал у Ридико. Выходы компараторов с ОК, поэтому подтягиваем их к питанию.
До этого момента все шло совсем гладко, но тут… Короче, я понял вышепреведенную блок-схему слишком буквально и попытался из 7474 сотворить RS-триггер: на Reset подал сигнал с компаратора, Data и Set подтянул через резистор к птианию, на CLK подал сигнал с генератора. Вроде заработало, но не совсем так. Сигнал на датчиках тока мне не понравился. После недолгих раздумий схема была приведена к тому виду, который в PDF-ке.
Результаты. На двигатель подал 40 В. Ток регулируется подстроечником от полного срыва питания до максимума. Нелинейно, но регулируется. Движок крутится, грохота нет, греется умеренно. Момент стабильнее, меньше зависит от скорости. Высоких оборотов пока не добился, поскольку таймер и формирование состояний выходов контроллера висит на компе, контроллер только ногами дрыгает по командам, поступающим по USB. Такое решение высокой стабильностью частоты следования импульсов не отличается, поэтому выше определенного порога вращение срывается. Позже попробую поручить это непосредственно контроллеру, глядишь удастся разогнать движок поболее.
В общем можно сказать, что попытка отлива боеприпасов из отходов удалась. Замечания и советы охотно принимаются.
we.easyelectronics.ru
Схемы управления шаговыми двигателями
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным. Поэтому наибольший практический интерес у новичков вызывает именно схема управления биполярным шаговым двигателем.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
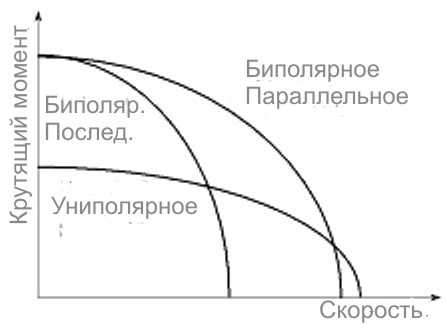
www.npoatom.ru
