Контроллер шагового двигателя схема | kavmaster
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
Схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
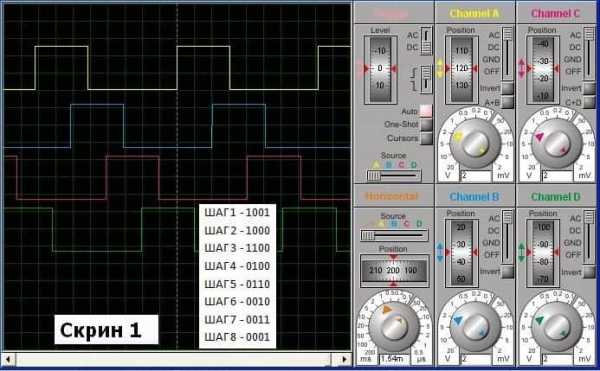
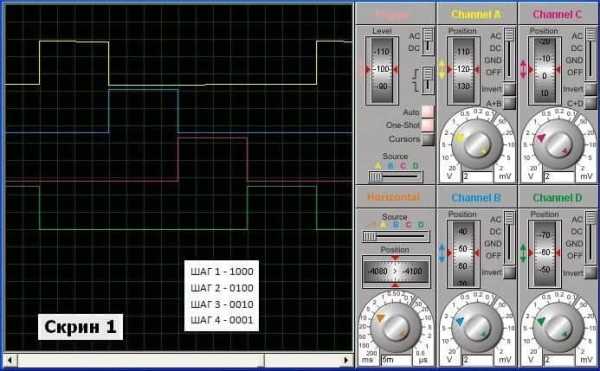
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
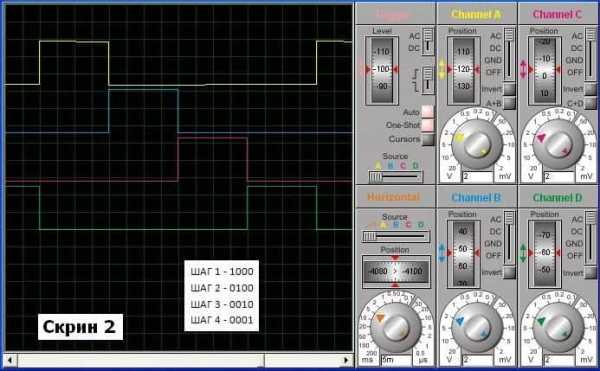
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
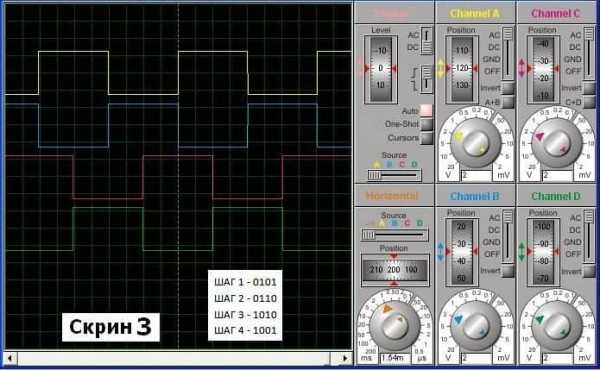
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
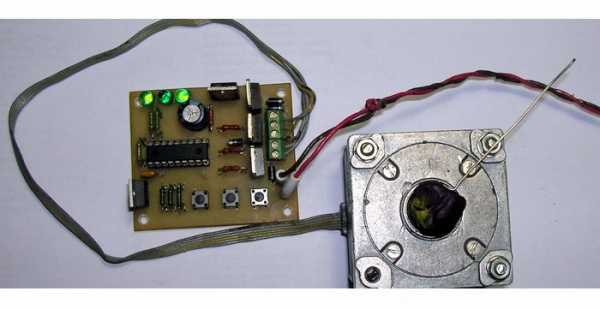
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.
Купить USB программатор PIC K150 ICSP
Источник: http://www.kondratev-v.ru
Похожее
kavmaster.ru
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
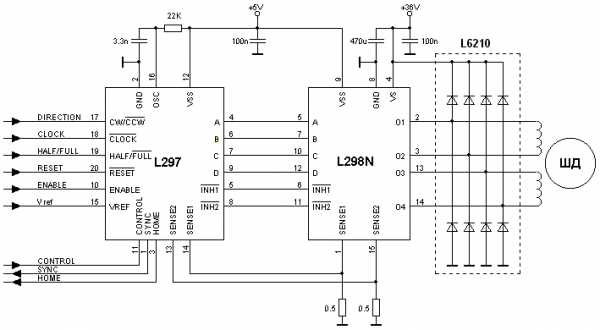 |
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
easyelectronics.ru
РадиоКот :: Пропорциональное управление шаговым двигателем
РадиоКот >Схемы >Цифровые устройства >Автоматика >Пропорциональное управление шаговым двигателем
Описываемое ниже устройство позволяет управлять униполярным шаговым двигателем типа СДХ 1,8/40 и аналогичным. Схема электрическая принципиальная блока управления изображена на рис.1. Он выполнен на базе микроконтроллера ATmega 8 работающего от встроенного тактового генератора на частоте 2 МГц. В качестве ключей, коммутирующих обмотки шагового двигателя М1, использованы логические элементы микросхем DD2, DD3 типа SN75452 (русский аналог — К155ЛА18). Это микросхемы – повышенной мощности с открытым коллекторным выходом.
Блок поддерживает пропорциональное и дискретное управление мотором. В режиме пропорционального управления — угол поворота ротора двигателя, задается переменный резистором R1. В режиме дискретного управления — вращение двигателя «влево», «вправо», «стоп» осуществляется кнопками S1 и S2. Кроме этого, в схеме можно выбирать шаговый или полушаговый режим работы, а также скорость вращения двигателя.
Установкой перемычки X4 выбирается пропорциональное управление, а при ее отсутствии – дискретное управление. Перемычкой X5 определяется шаговый и полушаговый режим работы двигателя. Все эти режимы работы инициализируются только в момент включения схемы или сброса микроконтроллера. Поэтому нужные перемычки необходимо установить перед включением питания. В микроконтроллере задействованы два канала АЦП. На вход одного из них – ADC5 (28 ножка) подключен подстроечный резистор R3. С его помощью регулируется скорость вращения двигателя при любом режиме работы схемы.
В режиме пропорционального управления задействуется еще один канал АЦП – ADC4 (27 ножка). На его вход через интегрирующую цепь R2, C1 подключен переменный резистор R1, который задает угол поворота ротора мотора. Скорость работы АЦП в данной управляющей программе осуществляет преобразования с 8 — битной точностью. Поэтому положение ручки переменного резистора R1 программа контроллера условно разбивает на 255 шагов. После включения питания, программа выполняет калибровку положения ротора шагового двигателя. Для этого, перед началом работы, автоматически выполняется команда «вращение двигателя влево» до тех пор, пока флажок, закрепленный на роторе мотора, не «доедет» до концевого датчика (оптопары) VT1, HL1. При поступлении сигнала с датчика VT1, программа обнуляет регистр-счетчик количества шагов двигателя, измеряет напряжение на выходе переменного резистора R1, преобразует его в цифровой код в диапазоне от 0 до 255, записывает его в старший байт регистра результата преобразования АЦП (это количество шагов переменного резистора R1), а затем сравнивает его содержимым регистра-счетчика количества шагов двигателя. Если число шагов резистора R1 больше чем шагов двигателя М1, то выдается команда: «вращение двигателя вправо». При этом с каждым шагом ротора происходит инкремент счетчика шагов двигателя и его сравнение с числом в регистре АЦП (шаги резистора R1). Когда число шагов двигателя станет равно числу в регистре АЦП, выполняется команда: «стоп». Поворачивая ручку резистора R1 «влево», уменьшается уровень постоянного напряжения на входе АЦП. При этом число в регистре результата преобразования АЦП станет меньше чем текущее значение регистра — счетчика шагов. В этом случае выдается команда: «вращение двигателя влево». С каждым шагом двигателя происходит декремент регистра-счетчика шагов двигателя до тех пор, пока числа в обоих регистрах не станут равны. Таким образом, вращая ручку переменного резистора R1, ротор двигателя поворачивается в том же направлении и на такое же количество шагов.
Отмечу, что предлагаемый двигатель совершает один оборот на 360° за 200 шагов (т.е. один шаг – 1,8 град.). Следовательно, в данной схеме, за 255 условных шагов от переменного резистора R1, ротор мотора сделает более одного оборота и повернется на угол 459°. Поэтому для ограничения угла поворота двигателя используется концевой датчик (оптопара) для крайнего правого положения ротора. Он выполнен на элементах VT2, HL2. Для более точного копирования угла поворота ручки переменного резистора ротором двигателя необходимо установить в разрыв вывода сопротивления R1, подключенного к «+5 В», ограничительный резистор Rогр.. Его номинал следует тщательно подобрать (в пределах от 1 до 3 кОм).
В управляющей программе предусмотрена функция повторной калибровки положения ротора двигателя в процессе работы устройства. Например, в случае проскальзывания шагов ротора, по какой либо причине (двигатель перегружен, зацепился за что-то и т.д.), можно повернуть ручку переменного резистора R1 в крайнее левое положение и подождать 2 — 3 секунды. При этом происходит проверка положения флажка ротора с помощью оптического датчика крайнего левого положения VT1. Если флажок не зашел в зону срабатывания датчика, значит в процессе работы произошло смещение шагов ротора мотора М1 относительно шагов резистора R1. В этом случае запускается программа повторной калибровки системы, и работа устройства восстанавливается.
Для работы схемы в режиме пропорционального управления оптический датчик крайнего левого положения и калибровки VT1 — обязателен. Датчик крайнего правого положения VT2 можно не ставить, если нет необходимости в ограничении положения ротора при вращении вправо. Но, тогда, необходимо 14 вывод микроконтроллера подключить к +5 В.
При пропорциональном управлении двигателем в полушаговом режиме ротор совершает поворот в пределах от 0° до 230°. Мощность мотора уменьшается, зато увеличивается плавность хода. Это необходимо учитывать при выборе этого режима работы.
В режиме дискретного управления вращение «вправо» осуществляется кнопкой S1, вращение «влево» — кнопкой S2. Если кнопки не нажаты, выполняется команда «стоп». Программа калибровки двигателя и переменный резистор R1 в этом режиме не используются. Оптические датчики VT1, HL1 и VT2, HL2 работают как ограничители крайних положений ротора двигателя М1. Если ограничение вращения не требуется, то эти оптопары можно не ставить. Но при этом необходимо выводы 14, 15 микроконтроллера припаять к +5В.
В случае необходимости контроля над работой шагового двигателя другими (внешними) устройствами, в схеме предусмотрены специальные выходы на старших пинах порта D микроконтроллера. На выводе PD7 «step» формируется кратковременный импульс прямоугольной формы при каждом шаге двигателя (может пригодиться для внешнего счетчика шагов). Вывод PD6 «rewers» – сигнал реверса двигателя (лог. 0 — вращение вправо, лог. 1 – вращение влево). При обнулении (сбросе) программного счетчика — регистра количества шагов, на выводе PD5 формируется кратковременный импульс «reset». Эти выходы работают и в режиме пропорционального управления.
Управляющая программа для микроконтроллера написана на языке Ассемблер. Файл прошивки прилагается. Кроме этого, необходимо запрограммировать фьюзы: CKSEL0=0, CKSEL1=1, CKSEL2=0, CKSEL3=0, SUT0=0, SUT1=1, SKOPT=1.
Печатная плата блока управления изображена на рис. 2. Она изготовлена из одностороннего фольгированного стеклотекстолита размерами 42 × 58 мм. В прикрепленном файле с расширением .lay прилагается рисунок для «лазерно-утюжной» технологии изготовления платы. Расположение элементов схемы на печатной плате приведено на рисунке 3.
После установки микросхемы – стабилизатора DA1, к ней, необходимо прикрутить радиатор площадью не менее 4 см². Собранная конструкция представлена на фото. 1 и фото. 2.
Как уже отмечалось, логические микросхемы SN75452 можно заменить русским аналогом — К155ЛА18. Раньше они использовались в старых пятидюймовых флоппи дисководах вместе с предлагаемым шаговым двигателем.
Предлагаемый блок может быть использован в различных устройствах с электромеханическим приводом. Например, у меня два таких модуля с шаговыми двигателями пропорционально управляют видеокамерой наблюдения с удаленным доступом по двум осям координат. Один мотор поворачивает камеру по оси Х, другой – по оси Y (фото. 3).
Видеоролик о работе девайса:
Файлы:
Печатная плата под ЛУТ
Рис. 1. Принципиальная схема
Файл прошивки
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Простая схема управления шаговым двигателем
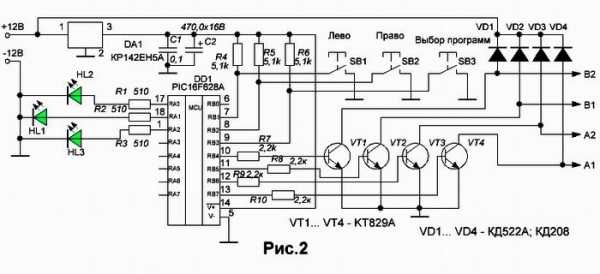
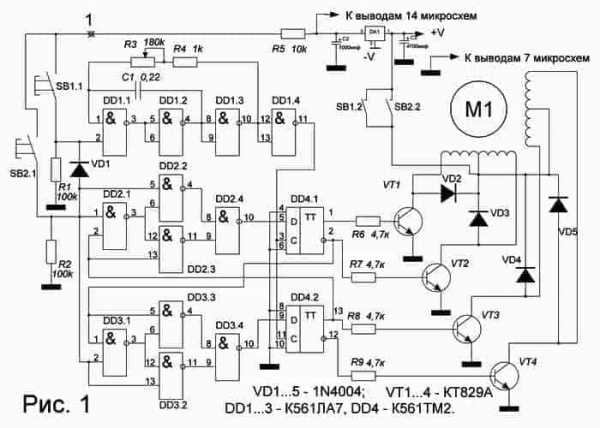
Опубликовал admin | Дата 10 января, 2014Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер.
При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя. Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины. В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью.

На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения. Микросхемы питаются через стабилизатор напряжения DA1 — КР142ЕН8Б. Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В.

Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь.
Скачать “простая схема управления шаговым двигателем” Shema-upravl-shagov-dvigatel.rar – Загружено 1754 раза – 31 KB
Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы».
Просмотров:35 012
www.kondratev-v.ru
Управление шаговым двигателем с помощью микроконтроллера. » Хабстаб
Всё началось с того, что в одном из устройств надо было поворачивать вал электродвигателя на определённое количество оборотов, большая точность не требовалась плюс-минус четверть оборота, поэтому было принято решение реализовать это с помощью электродвигателя постоянного тока. В качестве управляющего элемента был выбран микроконтроллер — Atmega16, но так как выходное напряжение выводов Atmega16 всего 5 вольт, а максимальный ток не должен превышать 20mA, а для управления двигателем необходим ток около десятка ампер и напряжение в несколько десятков вольт, управлять напрямую двигателем не получится. Нужен какой-то посредник, который получал бы на вход то, что может отдать микроконтроллер, а отдавал бы то, что хочет получить двигатель, такого посредника легко найти среди полевых транзисторов серии IRL, управляемых логическим уровнем .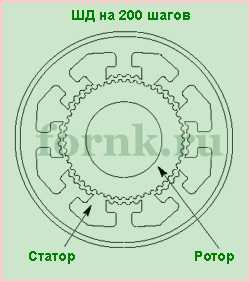
После первого запуска стало понятно, что хотели получить одно, а получили другое, после того как транзистор закрывался, двигатель продолжал вращаться ещё не один оборот, оно и понятно, для того чтобы вал остановился, энергия, которую он накопил пока вращался, должна быть израсходована.
Вот мы и подошли к одному из основных преимуществ шагового двигателя — возможность точного позиционирования.
Шаговые двигатели бывают трёх основных типов:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В двигателях с переменным магнитным сопротивлением, ротор изготовлен из магнитомягкого материала, то есть материала, который способен быстро намагничиваться и быстро терять магнитные свойства при снятии магнитного поля. Вращающий момент создаётся магнитными потоками статора, причём ротор всегда становится так, чтобы магнитный поток создаваемый статором замкнулся. Для того чтобы ротор повернулся надо, выключить ток в одной обмотке и включить в другой обмотке.
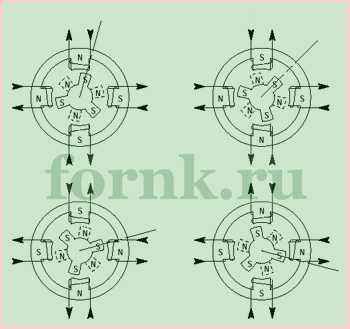
В двигателе с постоянными магнитами, ротор разделён на полюса. При подаче тока в одну из обмоток ротор займёт положение, в котором разноимённые полюса ротора и статора будут находиться напротив друг друга.

Гибридные двигатели обладают преимуществами вышеописанных двигателей и лучшими характеристиками: меньшей величиной шага, большим моментом, большей скоростью и как следствие стоят дороже.
Перейдём к практике, для эксперимента возьмём шаговый двигатель MITSUMI M42SP-5 с шагом 7.5°, изображённый на картинке.
Скачиваем на него даташит и находим таблицу.
Из таблицы понятно, что такие двигатели бывают двух типов:
- 12 вольтовые с сопротивлением обмотки 50 Ом
- 24 вольтовые с сопротивлением обмотки 120 Ом
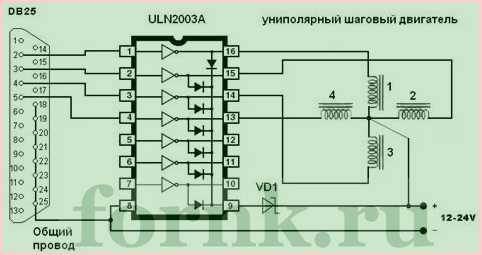
Схема двигателя изображена на картинке ниже.
Из двигателя выходит 5 проводов: 4 фазы и один общий. Общий провод можно найти с помощью мультиметра, сопротивление между ним и оставшимися 4 проводами равно сопротивлению фазы, в нашем случае 50 Ом.
Как писалось выше, необходим посредник, который примет от микроконтроллера 20mA и отдаст двигателю 259mA. Можно как раньше взять полевой транзистор, но есть одно, но фаз здесь целых четыре штуки и для этого случая есть более простое решение — это использовать микросхему ULN2003.
ULN2003 состоит из 7 транзисторов Дарлингтона, каждый из которых может пропустить через себя до 500mA, а рабочее напряжение не должно превышать 50V, чего нам вполне достаточно. На самом деле каждая ячейка ULN2003 состоит не только из транзистора Дарлингтона, а также включает в себя весь необходимый обвес, её структуру можно посмотреть в даташите.
Транзистор Дарлингтона или пара Дарлингтона, представляет собой два соединённых транзистора, его отличительной особенностью является высокий коэффициент усиления, который равен произведению коэффициентов усиления каждого из транзисторов(βс = β1 ∙ β2).
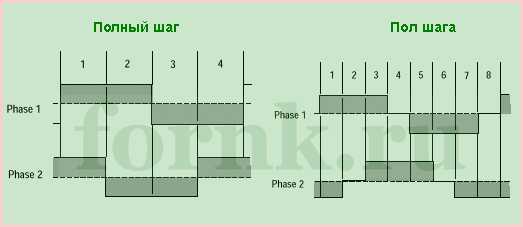
Вращать двигатель можно, подавая питание по очереди на обмотки, при этом в любой момент времени включена лишь одна обмотка, в этом случае двигатель будет работать в режиме шага, то есть при одном переключении обмоток будет поворачиваться на 7.5°.
Аналогичным образом можно включать две соседние обмотки, этот способ позволяет увеличить момент удержания, при этом двигатель будет работать в режиме шага.
Также можно включить двигатель в режиме полушага, то есть при одном переключении обмоток ротор будет поворачиваться на 3.75°.
Для удобства управления можно создать массив в котором номер элемента массива будет обозначать номер шага, а значение элемента массива — какие обмотки должны быть включены.
uint8_t step[8] = {0x01, 0x03 ,0x02, 0x06,0x04, 0x0c,0x08,0x09};
Если передавать последовательно элементы этого массива в порт микроконтроллера, двигатель будет работать в режиме полушага, если через один — в режиме полного шага. Для передачи значений в порт удобно использовать прерывание от таймера по переполнению, таким образом, изменяя время между прерываниями, мы можем регулировать скорость вращения двигателя.
hubstub.ru
Управление биполярным шаговым двигателем. Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838
- Часть 1. Теория. Схема с PIC12F629 и драйвером LB1838
- Часть 2. Схема с PIC12F629 и драйвером L293D
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:

Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема:
Элементы: R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень). С1, С2 = 0,1 мкФ — керамические конденсаторы. С3 = 470 мкФ х 16В — электролитический конденсатор. |
Готовый девайс:
Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Простейшая программа управления (.asm + .hex)
Скачать плату в формате DipTrace 2.0
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
продолжение (для драйвера L293D)…
radiohlam.ru
Управление униполярными шаговыми двигателями — Меандр — занимательная электроника
В статье рассматриваются практические решения для управления униполярными шаговыми двигателями. Рассматриваемые решения могут быть легко использованы на практике для различных приложений.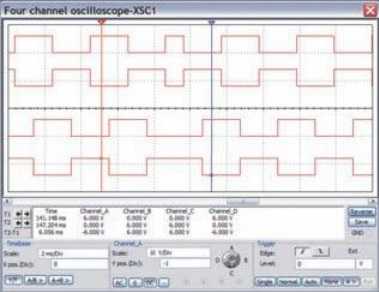 В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
Напомню, что основное свойство шагового двигателя в отличие от других типов электродвигателей как переменного, так и постоянного тока является то, что сдвиг его ротора осуществляется на заданный его конструкцией шаг (чаще это угол, реже — линейное смещение) при подаче на его обмотки импульсов напряжения. В этом он похож на шаговое реле, известное еще с XIX века. Его нельзя путать и с многофазными двигателями. Формально шаговые двигатели относятся к двигателям постоянного тока, но они не имеют коллектора (поэтому надежность их выше и помех от них значительно меньше). Для создания момента вращения в этих двигателях, в отличие от коллекторных двигателей постоянного тока, требуется внешнее импульсное управление обмотками, которые расположены не на роторе (который представляет собой постоянный магнит), а на статоре. Другими словами, если вы подадите на обмотку такого двигателя постоянное напряжения, то вращения ротора не будет. Нужно специальное устройство управления — коммутатор. В этом они проигрывают традиционным коллекторным двигателям постоянного тока. Но зато они выигрывают в большем моменте на малых и сверхмалых скоростях вращения, поэтому во многих применениях им не нужен редуктор. Кроме того, они обеспечивают без специальных конструктивных или схемных ухищрений точное позиционирование ротора и торможение, так как обладают не только моментом вращения, но и моментом удержания, который по величине выше момента вращения.
Имеются шаговые двигатели не только традиционного исполнения с вращающимся ротором, но и с его линейным перемещением. В последнем случае на один управляющий импульс происходит линейное смещение ротора на строго заданную конструкцией двигателя величину (подробности см. в [1]). Еще одно важное замечание: шаговый двигатель, в отличие от коллекторного, при стопорении ротора не увеличивает потребление энергии.
Конструкция двигателя
Шаговые двигатели различаются, как по конструктивному исполнению, так и по конфигурации соединения их обмоток. Исполнение двигателей в части обмоток может быть биполярное и униполярное. Основное преимущество униполярных шаговых двигателей заключается в простоте их систем управления, но они имеют меньший момент вращения [1]. На рис.1,а показано «классическое» исполнение включения обмоток, а на рис.1,б — универсальное с расщепленными обмотками, которое позволяет включать двигатель, как в униполярном, так и в биполярном вариантах. Кроме того, в «классическом исполнении» в некоторых типах двигателей средние выводы обмоток (выводы АВ, CD на рис.1,а) могут быть конструктивно объединены внутри самого двигателя (такой вариант как раз показан на фото в начале статьи). Так что если вам попался в руки неизвестный шаговый двигатель, то по количеству выводов вы относительно легко сможете его идентифицировать. Двигатели с шестью и пятью выводами будут гарантировано униполярными. Остается только оп разделить фазировку обмоток. К сожалению, это можно будет сделать только экспериментально. Какой-либо стандартизации по цвету проводов пока нет.
Рис. 1
Конфигурация обмоток униполярных шаговых двигателей и двигателей с расщепленными обмотками в униполярном включении позволяет обойтись без сложных драйверов и дорогостоящих ИМС. Кроме того, классические униполярные двигатели дешевле, так как, в основном, этот тип включения обмоток характерен для двигателей на постоянных магнитах с шагом 18° или 7,5°. Дробление такого большого шага осуществляется, как правило, дополнительным редуктором, который может быть конструктивно совмещен с двигателем [2].
Схема управления униполярного шагового двигателя с универсальным коммутатором
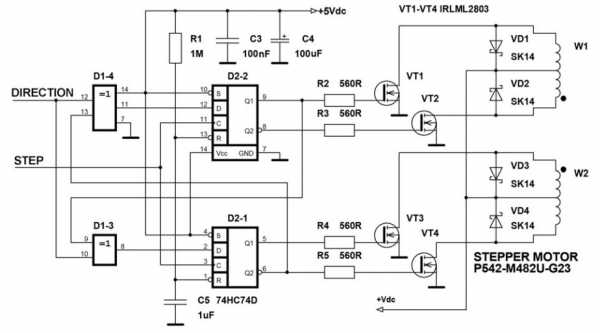
Практическое решение для управления униполярным шаговым двигателем потребовалось автору при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, то схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов, достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая годится для самых различных применений, показан на рис.2.
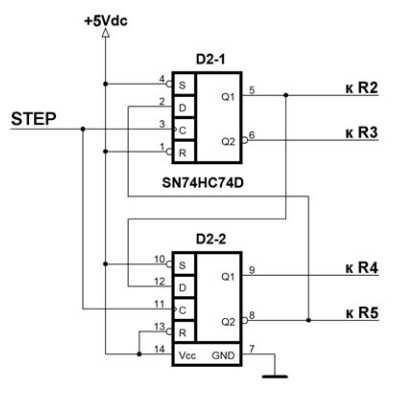
Рис. 2
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «STEP» («Шаг»), необходимое направление вращения устанавливается через вход «DIRECTION» («Направление вращения»). Оба эти сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис.2 они не показаны). Временная диаграмма работы коммутатора (рис2) показана на рис.3, где верхние две трассы — Q1 D2-2, 02 D2-2; нижние две трассы — Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз.
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис.3).
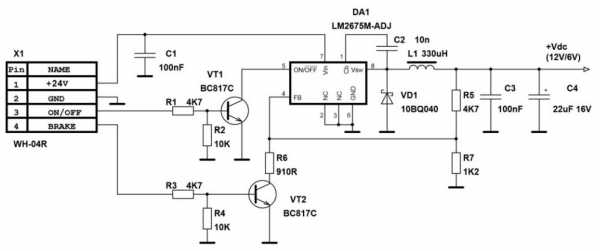
Рис. 3
Схема управления шаговым двигателем без реверса
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (рис.4), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая показана на рис.3 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
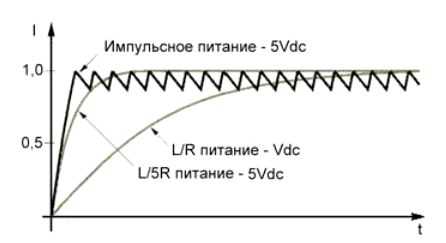
Рис. 4
Схема управления с режимами удержания и выключения
Управление моментом вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использовался импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4], хотя за время, прошедшее со времени публикации, в этот on-line калькулятор высокого уровня и были внесены некоторые изменения, но основа осталась та же. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток. Это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте использовалась ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, режим удержания, осуществляется прекращением подачи напряжения с частотой коммутации (вход «STEP»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя показан на рис.5. Такая схема пригодна для запитки шаговых двигателей любого типа.

Рис. 5
Схема (рис.5) обеспечивает подачу двух стабильных напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором (25:6) равен 19,8 Н*см, а момент вращения всего 6 Н*см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше практически не отличаются. Основное преимущество этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 мА до 230 мА, то есть в 2 раза, а мощность в 4 раза, то есть с 5,52 Вт до 1,38 Вт.
Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема X1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости, выходы схемы управления можно подключить непосредственно вместо упомянутых ключей.
Примечание. В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автором использовалась катушка SDR1006-331К (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16…18 В, что не окажет никакого влияния на его функционирование. Еще раз обращаю внимание, что при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f=(300…500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит еще и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f*7,5°/360°=(6,25-10,5) об/с,
где 7,5° — это угол поворота ротора двигателя на один шаг управления.
Этот угол как раз и задан конструктивно в самом двигателе. Дальнейшее понижение частоты вращения зависит уже от редуктора.
Изменение частоты вращения двигателя
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого с целью компенсации уменьшения момента вращения неизбежного с ростом частоты применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions») задан для двух условий, а именно: для условия обозначенного как L/R и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 Гц вместо 300 Гц. Что это за условия?
Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для них не требуется подача напряжения, а требуется обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения
lmax=Vdc/R;
l(t)=lmax*(1-e—t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где:
L — индуктивность обмотки двигателя;
R — общее сопротивление в цепи обмотки.
Это сопротивление может быть как собственным активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из при веденной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорционально сопротивлению. Чем быстрее ток достигнет своего максимального уровня
lmax=Vdc/RL,
где Vdc — это номинальное напряжение запитки обмотки, a Rl — активное сопротивление в цепи обмотки, тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель установить (насколько это возможно быстро) ток в обмотке на уровне Vcd/RL.
Импульсное питание двигателя
Просто увеличить напряжение на двигателе выше номинального крайне не желательно, даже если вы уверенны в том, что ток в обмотках при выбранной скорости вращения ротора не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vcd лишь на некоторое время, которое в несколько раз меньше длительности импульса управления, но это потребует дополнительных ключей, поэтому этот способ используется крайне редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличение напряжения питания Vcd. Это и ускорит накопление тока в индуктивности и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот как раз на этот режим и «намекает» спецификация [2].
В классической теории используется режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки R1 и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4Vcd на добавочных резисторах при малых скоростях вращения, особенно при остановке двигателя, будет рассеиваться мощность:
PR=(3Vcd)2/3RL=(3*12)2/(3*52,4)=8,24 Вт.
Фактически, с учетом допустимого коэффициента нагрузки придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения крайне низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока.
В данном случае для управления биполярным двигателем был применен драйвер с встроенной функцией нарезки, так называемый, чоппинг (от английского термина «chopping» — нарезка). В чем суть этого метода? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс установления максимального тока обмоток, после достижения заданной величины тока, преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД несравненно выше. Сравнение методов управления током в обмотках двигателя показано на рис.6.

Рис. 6
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис.2). Назначение этих диодов — гасить э.д.с. самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, что и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае необходимо предусмотреть соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I=230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.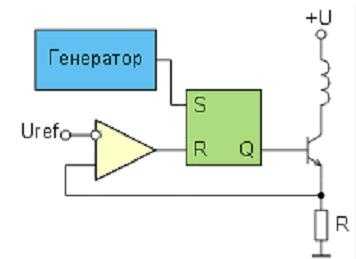
Таким образом, самым оптимальным для управления коммутацией обмоток является использования подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте использовали транзисторы IRLML2803 с Rdc(on)=0,25 Ом, допустимой мощность рассеивания 540 мВ и постоянным током стока 0,93 А при температуре 70°С. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT<Rdc(on)*I2=0,25*(0,230)2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание. Когда речь идет о частоте вращения ротора шагового двигателя, то имеется ввиду именно вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются шаговые двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все необходимые параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
- Рентюк В. Шаговые двигатели и особенности их применения // Электрик. — 2012. — №11.
- Geared stepper motor Р542-М48 series, Mclennan Servo Supplies Ltd.mclennan.co.uk.
- Rentyuk V. Control stepper motors in both directions // — 2010. — March 18.
- Рентюк В. Проектирование DC/DC-преобразователей в системе WEBENCH Design Center // Электрик. — 2013. — №10.
- LM2675 SIMPLE SWITCHER Power Converter High Efficiency 1A Step-Down Voltage Regulator, Texas Instruments Inc., Rev. June 2005.
- Дьяконов В.П., Маскимчук A.A., Ремнев A.M., Смердов В.Ю. Энциклопедия устройств на полевых транзисторах. — М.: СОЛОН-Р, 2002.
Автор: Владимир Рентюк, г. Запорожье, Украина
Возможно, вам это будет интересно:
meandr.org
